ForceBand: Learning Forceful Manipulation with sEMG
Pith reviewed 2026-06-25 19:14 UTC · model grok-4.3
The pith
A wrist-worn sEMG band converts muscle activity into per-finger force labels for robot manipulation training.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
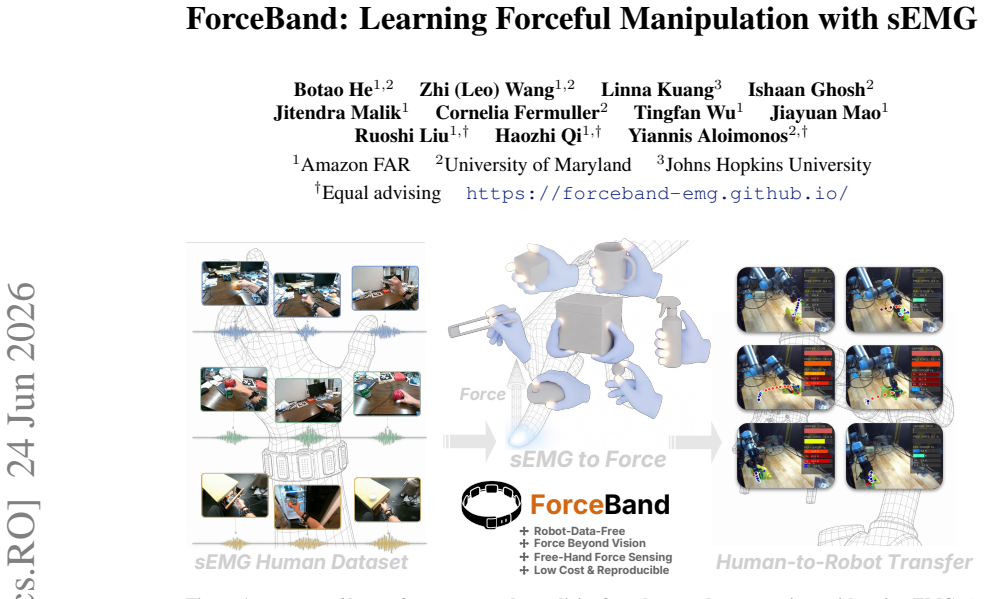
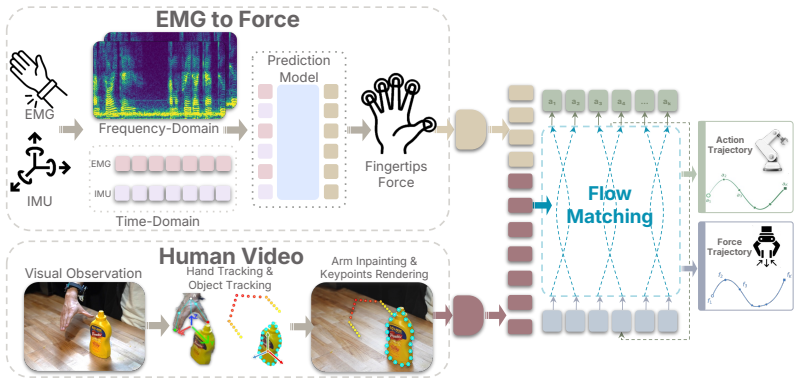
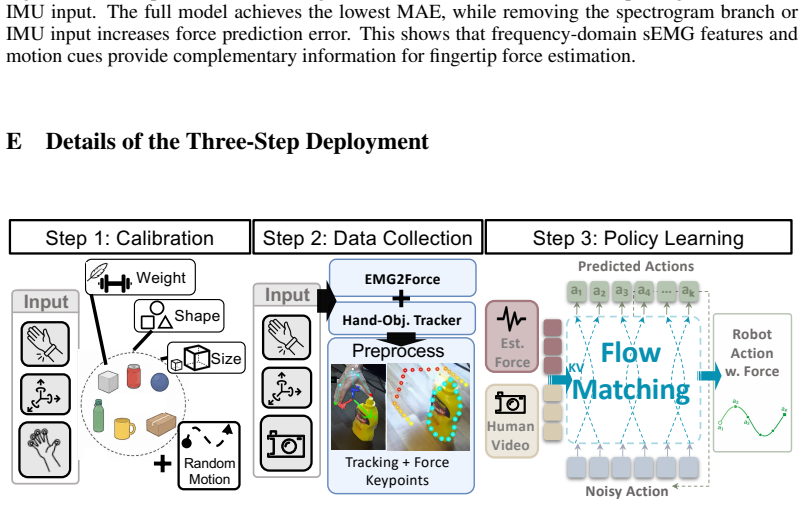
ForceBand collects a multimodal dataset to pre-train an EMG2Force model that predicts per-finger forces from sEMG and IMU; after short calibration the model labels target demonstrations collected with only the band and video, producing force-augmented data that improves robot policy learning on forceful tasks.
What carries the argument
The EMG2Force model that maps sEMG and IMU signals to per-finger force predictions.
If this is right
- Robot policies can be trained on contact-rich actions without requiring force sensors at demonstration time.
- Force-augmented demonstrations improve success rates on tasks that need precise squeezing or gripping forces.
- Data collection becomes scalable because only a low-cost band and camera are needed after initial training.
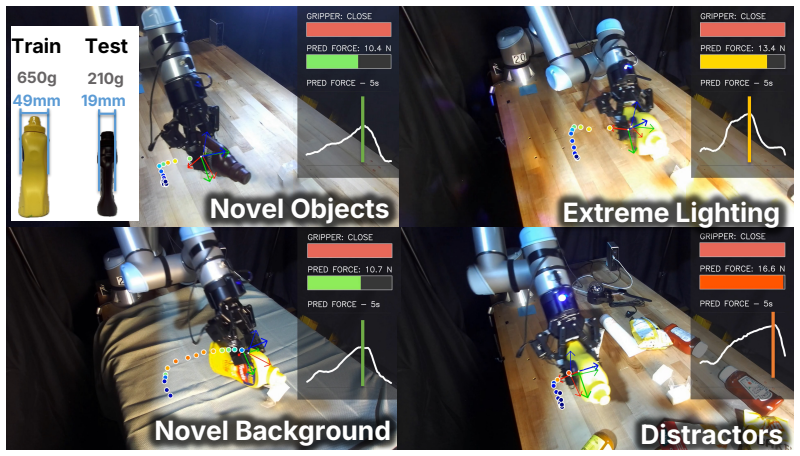
- The approach works across objects that differ in shape, size, and weight once calibration is done.
Where Pith is reading between the lines
- Combining the EMG predictions with existing vision force estimators could raise accuracy further on ambiguous contacts.
- Collecting calibration data across multiple users might reduce or remove the per-user step.
- The same wrist signals could support real-time force feedback during robot teleoperation.
Load-bearing premise
A short user-specific calibration lets the pre-trained model accurately predict forces on new tasks and unseen objects.
What would settle it
Running the calibrated model on a new set of objects and tasks where force prediction error equals or exceeds the vision baseline would falsify the performance claim.
Figures
read the original abstract
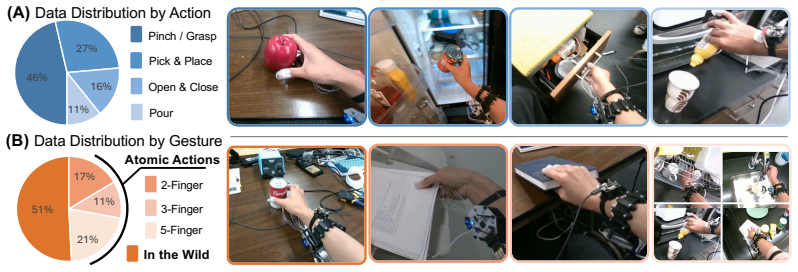
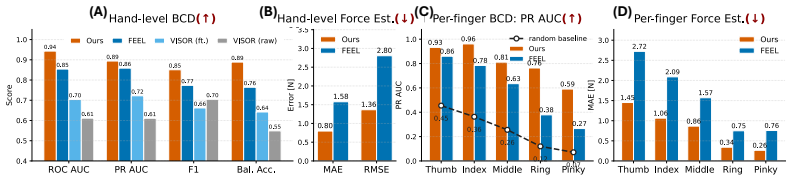
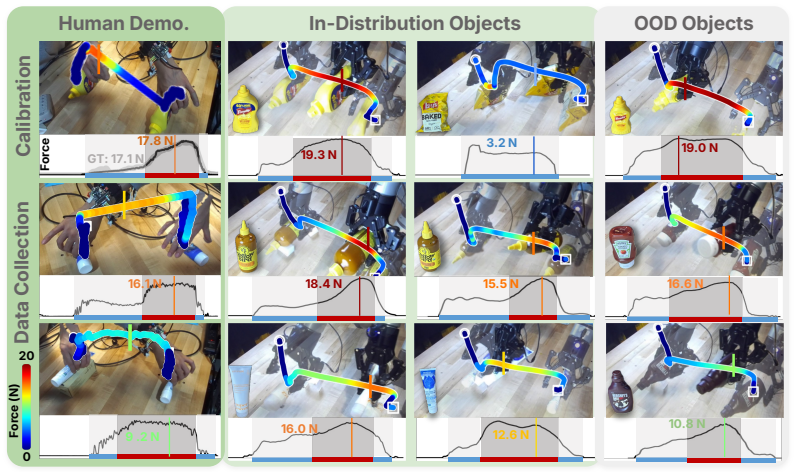
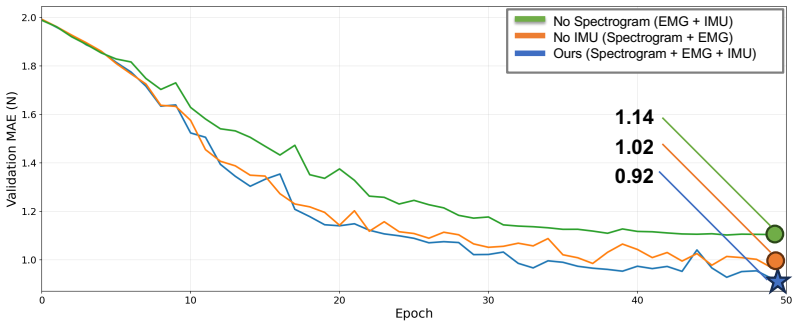
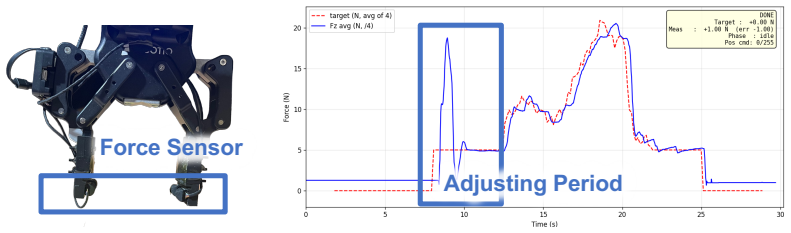
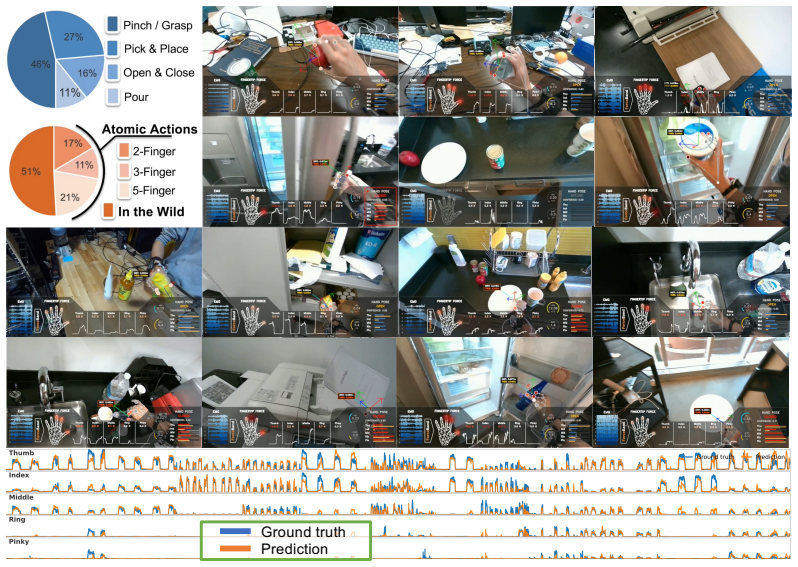
Human demonstrations are a scalable data source for learning robot manipulation policies. However, common sources of human demonstration data, such as motion-capture trajectories and internet videos, capture mostly motion and appearance while missing the contact forces that are critical for force-sensitive manipulation. In this paper, we introduce ForceBand, a low-cost wrist-worn sEMG system that turns human muscle activity into force-enriched demonstrations. We first collect a 10-hour multimodal dataset containing egocentric video, sEMG, IMU, and fingertip force measurements across diverse actions and objects. Using this dataset, we pre-train an EMG2Force model that predicts per-finger forces from sEMG and IMU signals. After a short user-specific calibration, users can collect target-task demonstrations using only ForceBand and video; EMG2Force then labels these demonstrations with per-finger force traces, producing force-augmented demonstrations for robot policy learning. Experiments show that ForceBand recovers fine-grained fingertip interactions with over 50% lower force prediction error than vision-based baselines and achieves an 87% success rate on pick, squeeze, and place tasks that require object-specific force control across objects with diverse shapes, sizes, and weights. Project website: https://forceband-emg.github.io
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces ForceBand, a low-cost wrist-worn sEMG system for capturing force information in human demonstrations for robot manipulation. It details the collection of a 10-hour multimodal dataset with egocentric video, sEMG, IMU, and fingertip forces, pre-training of an EMG2Force model to predict per-finger forces, and use of short user-specific calibration to generate force-augmented demonstrations for policy learning on new tasks. Experiments claim over 50% lower force prediction error than vision-based baselines and 87% success rate on pick, squeeze, and place tasks requiring object-specific force control across diverse objects.
Significance. If the empirical results hold under proper controls, this approach could enable scalable collection of force-enriched demonstrations using inexpensive hardware, addressing a key gap in current sources of human demonstration data that lack contact forces. The pre-training plus calibration pipeline offers a practical route to object-specific force control in manipulation policies.
major comments (2)
- [Abstract] Abstract: the reported quantitative improvements (over 50% lower force prediction error and 87% success rate) are presented without information on experimental controls, statistical significance, dataset splits, number of users/objects, or failure mode analysis, preventing evaluation of whether the gains over vision baselines are reliable.
- [Methods (EMG2Force and Calibration)] The central claim depends on the short user-specific calibration step allowing the pre-trained EMG2Force model (from 10 h of data) to generalize per-finger force predictions to unseen target tasks and objects; no quantitative evidence or ablations are provided on robustness to sEMG variability factors such as electrode drift, fatigue, or muscle recruitment changes between calibration and deployment.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract and the calibration robustness. We address each major comment below and will revise the manuscript to improve clarity and add supporting analysis where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: the reported quantitative improvements (over 50% lower force prediction error and 87% success rate) are presented without information on experimental controls, statistical significance, dataset splits, number of users/objects, or failure mode analysis, preventing evaluation of whether the gains over vision baselines are reliable.
Authors: We agree that the abstract would benefit from additional context on the scale of the experiments. The full manuscript (Sections 4 and 5) reports results across 5 users and 20 objects, with dataset splits using leave-one-user-out cross-validation, statistical significance via paired t-tests (p < 0.01), and failure mode categorization (insufficient force, excessive force, slippage). To address the concern directly, we will revise the abstract to include a brief clause on the number of users/objects and note that improvements are statistically significant. revision: yes
-
Referee: [Methods (EMG2Force and Calibration)] The central claim depends on the short user-specific calibration step allowing the pre-trained EMG2Force model (from 10 h of data) to generalize per-finger force predictions to unseen target tasks and objects; no quantitative evidence or ablations are provided on robustness to sEMG variability factors such as electrode drift, fatigue, or muscle recruitment changes between calibration and deployment.
Authors: The manuscript demonstrates generalization via the 2-minute per-user calibration on new tasks/objects, but we acknowledge the absence of explicit ablations on electrode drift, fatigue, or muscle recruitment variability. We will add a new ablation subsection in the revised manuscript that quantifies force prediction error under controlled electrode repositioning (simulating drift) and after extended sessions (simulating fatigue), using the existing dataset. revision: yes
Circularity Check
No circularity: empirical pipeline with no self-referential derivations
full rationale
The paper presents an empirical pipeline: collect multimodal dataset, train EMG2Force model on paired sEMG/IMU/force data, apply short calibration for new users, label target demonstrations, and evaluate policy success rates experimentally. No equations, first-principles derivations, or predictions are claimed that reduce to fitted inputs by construction. The central results (force prediction error reduction, 87% task success) are measured outcomes on held-out tasks, not tautological renamings or self-citations that bear the load of the argument. Self-contained against external benchmarks with no load-bearing self-referential steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
S. Bahl, A. Gupta, and D. Pathak. Human-to-robot imitation in the wild. InRobotics: Science and Systems (RSS), 2022
2022
-
[2]
Haldar and L
S. Haldar and L. Pinto. Point policy: Unifying observations and actions with key points for robot manipulation. InConference on Robot Learning (CoRL), 2025
2025
-
[3]
M. Levy, S. Haldar, L. Pinto, and A. Shrivastava. P3-po: Prescriptive point priors for visuo- spatial generalization of robot policies. InInternational Conference on Robotics and Automa- tion (ICRA), 2025
2025
-
[4]
H. G. Singh, A. Loquercio, C. Sferrazza, J. Wu, H. Qi, P. Abbeel, and J. Malik. Hand-object interaction pretraining from videos. InInternational Conference on Robotics and Automation (ICRA), 2025
2025
-
[5]
Z. Wang, B. He, K. Yu, S. Lee, R. Gao, F. Huang, and Y . Aloimonos. Humanego: Zero-shot robot learning from minutes of human egocentric videos.arXiv:2605.24934, 2026
Pith/arXiv arXiv 2026
-
[6]
Guzey, H
I. Guzey, H. Qi, J. Urain, C. Wang, J. Yin, K. Bodduluri, M. Lambeta, A. Rai, J. Malik, T. Wu, A. Sharma, and H. Bharadhwaj. Dexterity from smart lenses: Multi-fingered robot manipulation with in-the-wild human demonstrations. InInternational Conference on Robotics and Automation (ICRA), 2026
2026
-
[7]
C. Wang, F. Xia, W. Yu, T. Zhang, R. Zhang, C. K. Liu, L. Fei-Fei, J. Tan, and J. Liang. Chain- of-Modality: Learning manipulation programs from multimodal human videos with vision- language-models. InInternational Conference on Robotics and Automation (ICRA), 2025
2025
-
[8]
Narasimhaswamy, T
S. Narasimhaswamy, T. Nguyen, and M. H. Nguyen. Detecting hands and recognizing physical contact in the wild. InNeural Information Processing Systems (NeurIPS), 2020
2020
-
[9]
T. Yagi, M. T. Hasan, and Y . Sato. Hand-object contact prediction via motion-based pseudo- labeling and guided progressive label correction. InBritish Machine Vision Conference (BMVC), 2021
2021
-
[10]
Hampali, M
S. Hampali, M. Rad, M. Oberweger, and V . Lepetit. Honnotate: A method for 3d annotation of hand and object poses. InComputer Vision and Pattern Recognition (CVPR), 2020
2020
-
[11]
Brahmbhatt, C
S. Brahmbhatt, C. Tang, C. D. Twigg, C. C. Kemp, and J. Hays. Contactpose: A dataset of grasps with object contact and hand pose. InEuropean Conference on Computer Vision (ECCV), 2020
2020
-
[12]
T. H. E. Tse, Z. Zhang, K. I. Kim, A. Leonardis, F. Zheng, and H. J. Chang. S 2 contact: Graph-based network for 3d hand-object contact estimation with semi-supervised learning. In European Conference on Computer Vision (ECCV), 2022. 9
2022
-
[13]
J. Zhou, Z. Gao, F. Hong, Z. Liu, G. Zhang, W. Dai, R. Zhen, C. Lyu, H. Wu, Y . Mao, X. Wang, Y . Jiang, W. Ding, and S. Yang. Touchanything: A dataset and framework for bimanual tactile estimation from egocentric video.arXiv:2605.13083, 2026
Pith/arXiv arXiv 2026
-
[14]
Y . R. Song, J. Li, R. Fu, D. Murphy, K. Zhou, R. Shiv, Y . Li, H. Xiong, C. E. Owens, Y . Du, Y . Luo, X. Cheng, A. Torralba, W. Matusik, and P. P. Liang. Opentouch: Bringing full-hand touch to real-world interaction.arXiv:2512.16842, 2025
arXiv 2025
-
[15]
J. Yin, H. Qi, Y . Wi, S. Kundu, M. Lambeta, W. Yang, C. Wang, T. Wu, J. Malik, and T. Helle- brekers. Osmo: Open-source tactile glove for human-to-robot skill transfer.Robotics and Automation Letters (RA-L), 2026
2026
-
[16]
A. Adeniji, Z. Chen, V . Liu, V . Pattabiraman, R. Bhirangi, S. Haldar, P. Abbeel, and L. Pinto. Feel the force: Contact-driven learning from humans.arXiv:2506.01944, 2025
arXiv 2025
-
[17]
W. Sun, J. Zhu, Y . Jiang, H. Yokoi, and Q. Huang. One-channel surface electromyography decomposition for muscle force estimation.Frontiers in Neurorobotics, 2018
2018
-
[18]
Y . Xiao, Z. Huang, J. Ren, Y . Bai, H. Song, Z. Jin, and Y . Gao. Wrist2finger: Sensing fingertip force for force-aware hand interaction with a ring-watch wearable. InUser Interface Software and Technology (UIST), 2025
2025
-
[19]
Q. Zhao, W. Li, C. Wang, and K. Zhang. DexEMG: Towards dexterous teleoperation system via EMG2Pose generalization.arXiv:2603.05861, 2026
arXiv 2026
-
[20]
O. Sim ´eoni, H. V . V o, M. Seitzer, F. Baldassarre, M. Oquab, C. Jose, V . Khalidov, M. Szafraniec, S. Yi, M. Ramamonjisoa, et al. Dinov3.arXiv:2508.10104, 2025
Pith/arXiv arXiv 2025
-
[21]
Lipman, R
Y . Lipman, R. T. Q. Chen, H. Ben-Hamu, M. Nickel, and M. Le. Flow matching for generative modeling. InInternational Conference on Learning Representations (ICLR), 2023
2023
-
[22]
Tavakoli, C
M. Tavakoli, C. Benussi, P. A. Lopes, L. B. Osorio, and A. T. de Almeida. Robust hand gesture recognition with a double channel surface emg wearable armband and svm classifier. Biomedical Signal Processing and Control, 2018
2018
-
[23]
F. S. Botros, A. Phinyomark, and E. J. Scheme. Day-to-day stability of wrist emg for wearable- based hand gesture recognition.IEEE Access, 2022
2022
-
[24]
Y . Liu, C. Lin, and Z. Li. Wr-hand: Wearable armband can track user’s hand. InInteractive, Mobile, Wearable and Ubiquitous Technologies (IMWUT), 2021
2021
-
[25]
Pradhan, J
A. Pradhan, J. He, and N. Jiang. Multi-day dataset of forearm and wrist electromyogram for hand gesture recognition and biometrics.Scientific Data, 2022
2022
-
[26]
Darkhalil, D
A. Darkhalil, D. Shan, B. Zhu, J. Ma, A. Kar, R. Higgins, S. Fidler, D. Fouhey, and D. Damen. Epic-kitchens visor benchmark: Video segmentations and object relations.Neural Information Processing Systems (NeurIPS), 2022
2022
-
[27]
E. Dessalene, B. He, M. Maynord, Y . Tussa, P. Mantripragada, Y . Karabati, N. Roy, and Y . Aloimonos. Feel (force-enhanced egocentric learning): A dataset for physical action un- derstanding.arXiv:2603.15847, 2026
arXiv 2026
-
[28]
emg2pose: A large and diverse benchmark for surface electromyographic hand pose estimation
CTRL-Labs at Reality Labs et al. emg2pose: A large and diverse benchmark for surface electromyographic hand pose estimation. InNeural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2024
2024
-
[29]
J. Xu, R. Wang, S. Shang, A. Chen, L. Winterbottom, T.-L. Hsu, W. Chen, K. Ahmed, P. L. La Rotta, X. Zhu, D. M. Nilsen, J. Stein, and M. Ciocarlie. Chatemg: Synthetic data generation to control a robotic hand orthosis for stroke.Robotics and Automation Letters (RA-L), 2024. 10
2024
-
[30]
R. Wang, X. Zhu, A. Chen, J. Xu, L. Winterbottom, D. M. Nilsen, J. Stein, and M. Cio- carlie. Reactemg: Stable, low-latency intent detection from semg via masked modeling. arXiv:2506.19815, 2025
arXiv 2025
-
[31]
S. Verma. emg2tendon: From semg signals to tendon control in musculoskeletal hands. In Robotics: Science and Systems (RSS), 2025
2025
-
[32]
J. Yang, K. Shibata, D. Weber, and Z. Erickson. High-density electromyography for effective gesture-based control of physically assistive mobile manipulators.npj Robotics, 2025
2025
-
[33]
Pelaez Murciego, M
L. Pelaez Murciego, M. C. Henrich, E. G. Spaich, and S. Dosen. Reducing the number of emg electrodes during online hand gesture classification with changing wrist positions.Journal of NeuroEngineering and Rehabilitation, 2022
2022
-
[34]
M. Cho, Y . Cho, and K.-S. Kim. Training strategy and semg sensor positioning for finger force estimation at various elbow angles.International Journal of Control, Automation and Systems, 2022
2022
-
[35]
H. Mao, P. Fang, and G. Li. Simultaneous estimation of multi-finger forces by surface elec- tromyography and accelerometry signals.Biomedical Signal Processing and Control, 2021
2021
-
[36]
Xiong, Q
H. Xiong, Q. Li, Y .-C. Chen, H. Bharadhwaj, S. Sinha, and A. Garg. Learning by watching: Physical imitation of manipulation skills from human videos. InInternational Conference on Intelligent Robots and Systems (IROS), 2021
2021
-
[37]
Guzey, Y
I. Guzey, Y . Dai, G. Savva, R. Bhirangi, and L. Pinto. Bridging the human to robot dexterity gap through object-oriented rewards. InInternational Conference on Robotics and Automation (ICRA), 2025
2025
-
[38]
Kr ¨uger, C
N. Kr ¨uger, C. Geib, J. Piater, R. Petrick, M. Steedman, F. W ¨org¨otter, A. Ude, T. Asfour, D. Kraft, D. Omrˇcen, et al. Object–action complexes: Grounded abstractions of sensory–motor processes.Robotics and Autonomous Systems, 59(10):740–757, 2011
2011
-
[39]
Introducing meta ray-ban display and the meta neu- ral band.https://about.fb.com/news/2025/09/ meta-ray-ban-display-ai-glasses-emg-wristband/, 2025
Meta. Introducing meta ray-ban display and the meta neu- ral band.https://about.fb.com/news/2025/09/ meta-ray-ban-display-ai-glasses-emg-wristband/, 2025
2025
-
[40]
Manus metagloves: Hand and finger tracking.https://www.manus-meta
Manus. Manus metagloves: Hand and finger tracking.https://www.manus-meta. com/, 2025
2025
-
[41]
J. Engel, K. Somasundaram, M. Goesele, A. Sun, A. Gamino, A. Turner, A. Talattof, A. Yuan, B. Souti, B. Meredith, et al. Project aria: A new tool for egocentric multi-modal ai research. arXiv preprint arXiv:2308.13561, 2023
Pith/arXiv arXiv 2023
-
[42]
S. Liu, Z. Zeng, T. Ren, F. Li, H. Zhang, J. Yang, C. Li, J. Yang, H. Su, J. Zhu, and L. Zhang. Grounding DINO: Marrying DINO with grounded pre-training for open-set object detection. InEuropean Conference on Computer Vision (ECCV), 2024
2024
-
[43]
N. Ravi, V . Gabeur, Y .-T. Hu, R. Hu, C. Ryali, T. Ma, H. Khedr, R. R ¨adle, C. Rolber, L. Gustafson, et al. SAM 2: Segment anything in images and videos. InInternational Confer- ence on Learning Representations (ICLR), 2025
2025
-
[44]
Karaev, I
N. Karaev, I. Rocco, B. Graham, N. Neverova, A. Vedaldi, and C. Rupprecht. CoTracker: It is better to track together. InEuropean Conference on Computer Vision (ECCV), 2024
2024
-
[45]
Z. Wu, Y . Li, S. Chen, G. Yin, X. Liu, Y . Wang, and Q. Zhao. Orient anything: Learning robust object orientation estimation from rendering 3D models. InNeural Information Processing Systems (NeurIPS), 2025
2025
-
[46]
Suvorov, E
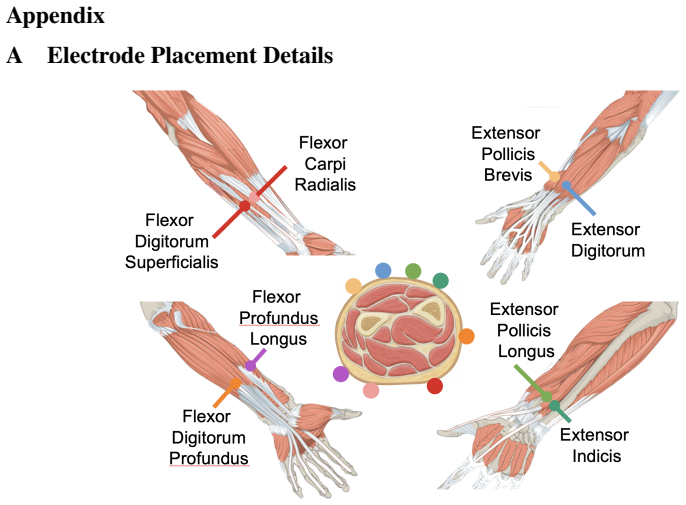
R. Suvorov, E. Logacheva, A. Mashikhin, A. Remizova, A. Ashukha, A. Silvestrov, N. Kong, H. Goka, K. Park, and V . Lempitsky. Resolution-robust large mask inpainting with Fourier convolutions. InWinter Conference on Applications of Computer Vision (WACV), 2022. 11 Appendix A Electrode Placement Details Figure 7: Electrode placement details. We use eight s...
2022
-
[47]
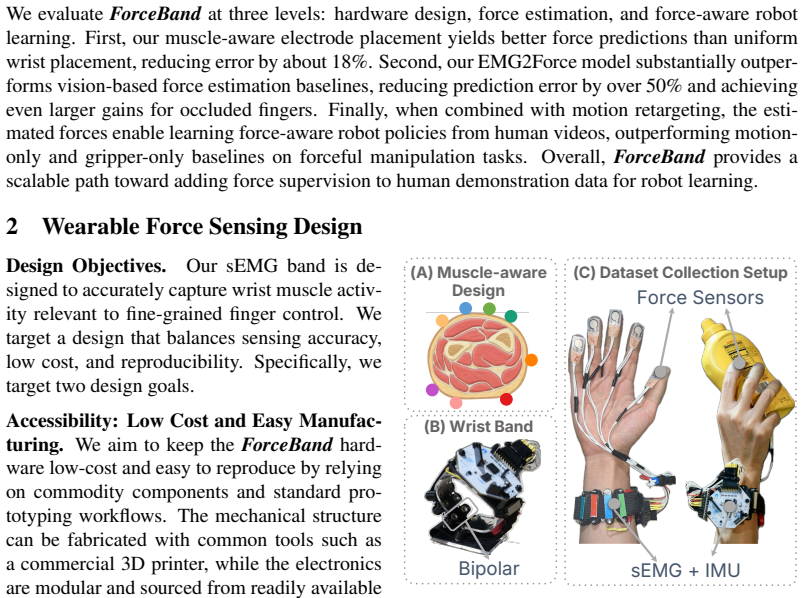
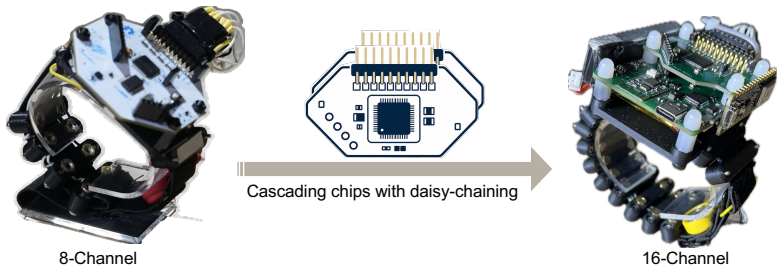
B Hardware Extensibility The 8-channel configuration used in our experiments was selected as a practical balance between muscle coverage, wearability, and system complexity
validates correct sensor positioning on the intended muscle sites, safeguarding the accuracy and consistency of subsequent measurements. B Hardware Extensibility The 8-channel configuration used in our experiments was selected as a practical balance between muscle coverage, wearability, and system complexity. However, the wearable acquisition platform is ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.