Compliant Non-Prehensile Pushing Manipulation
Pith reviewed 2026-06-29 21:44 UTC · model grok-4.3
The pith
An MPC framework with energy tank filter allows compliant non-prehensile pushing while maintaining passivity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The MPC framework enables compliant pushing through optimal modulation of the robot's position/velocity set-point, jointly realizing the required pushing force and contact point adaptation to obtain desired object motion, while the energy tank passivity filter guarantees passivity and avoids uncontrolled energy buildup.
What carries the argument
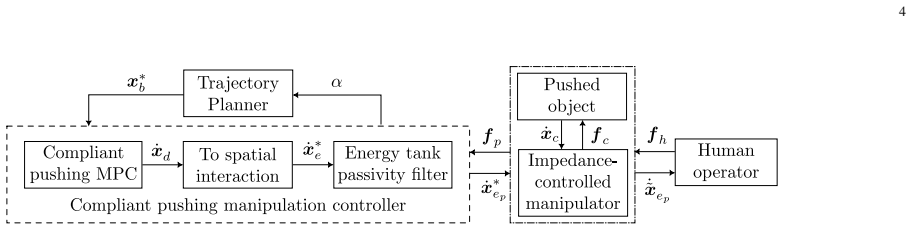
Model predictive control framework built on the extended pushing model, with integrated energy tank passivity filter for modulating velocity set-points.
If this is right
- Compliant pushing operations can be performed safely in environments with humans.
- Passive behavior is guaranteed during external physical interactions.
- Desired object motions are achieved even with variations in the object's physical parameters.
- Tracking errors from disturbances do not lead to indefinite increases in pushing force.
Where Pith is reading between the lines
- This approach could be applied to other manipulation tasks requiring compliance, such as sliding heavy objects.
- Combining the framework with online estimation of object parameters might improve robustness further.
Load-bearing premise
The state-of-the-art pushing model can be directly extended and integrated with impedance control to yield an MPC that produces stable passive behavior under disturbances without extra unmodeled terms.
What would settle it
An experiment in which external disturbances during pushing cause either a loss of passivity or failure to track the desired object trajectory when using the proposed MPC and filter.
Figures

read the original abstract
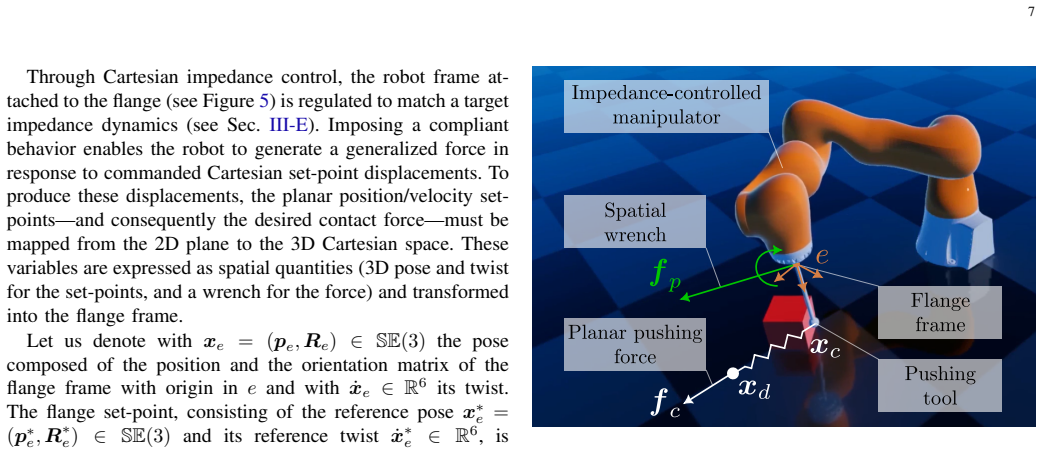
In this paper, we address the challenge of performing non-prehensile pushing operations with a compliant robotic manipulation system. To ensure safe operations in human-populated environments, robots must comply with external physical interactions and exhibit passive behavior. To achieve this, we extend a state-of-the-art pushing model to integrate it with impedance-controlled robots. We develop a model predictive control framework built upon this model that enables compliant pushing through optimal modulation of the robot's position/velocity set-point, jointly realizing the required pushing force and contact point adaptation to obtain desired object motion. However, external interactions may induce tracking errors, causing a consequent potentially indefinite increase of the pushing force. To prevent this, we integrate an energy tank passivity filter that further modulates the robot velocity set-point to guarantee passivity and avoid uncontrolled energy buildup. The proposed method has been rigorously tested in simulation and validated through experiments on two different robotic systems, demonstrating passive compliance during human-robot interactions and assessing trajectory tracking performance and robustness to variations in the object's physical parameters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes extending a state-of-the-art pushing model for integration with impedance-controlled robots, then embedding it in an MPC framework that modulates the robot's position/velocity set-point to achieve compliant non-prehensile pushing while realizing required forces and contact adaptation. An energy-tank passivity filter is layered on the velocity command to enforce passivity and bound energy under external disturbances and tracking errors. The approach is evaluated in simulation and on two physical robotic platforms for passive compliance during human interaction, trajectory tracking, and robustness to object parameter variation.
Significance. If the model extension and tank application preserve the claimed guarantees without unmodeled compensation, the work supplies a concrete, experimentally validated pipeline for safe pushing manipulation that combines predictive set-point optimization with energy-based passivity; this is a useful engineering contribution for human-populated environments where both compliance and object-motion tracking are required.
Simulated Author's Rebuttal
We thank the referee for their summary of the manuscript and for noting the potential utility of the MPC-plus-energy-tank pipeline for compliant pushing in human environments. The recommendation is listed as uncertain, yet the report contains no enumerated major comments. We therefore have no specific points to rebut or revise at this time and remain available to address any additional questions the referee may wish to raise.
Circularity Check
No significant circularity detected
full rationale
The paper describes extending an external state-of-the-art pushing model, embedding it in an MPC framework for set-point modulation, and layering a standard energy-tank passivity filter. No equations or claims in the provided abstract reduce by construction to author-defined fitted parameters, self-citations that bear the central load, or ansatzes smuggled from prior work. The derivation chain relies on independent external models and established passivity techniques, with validation via simulation and experiments on separate hardware. This is a standard engineering pipeline without internal reduction to inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Service robots: A systematic literature review,
I. Lee, “Service robots: A systematic literature review,” Electronics, vol. 10, p. 2658, 2021
2021
-
[2]
Service robots in the healthcare sector,
J. Holland, L. Kingston, C. McCarthy, E. Armstrong, P. O’Dwyer, F. Merz, and M. McConnell, “Service robots in the healthcare sector,” Robotics, vol. 10, no. 1, p. 47, 2021
2021
-
[3]
Nonprehensile dynamic manipulation: A survey,
F. Ruggiero, V . Lippiello, and B. Siciliano, “Nonprehensile dynamic manipulation: A survey,” IEEE Robot. Autom. Lett. , vol. 3, no. 3, pp. 1711–1718, 2018
2018
-
[4]
Non-prehensile object transportation via model predictive non-sliding manipulation control,
M. Selvaggio, A. Garg, F. Ruggiero, G. Oriolo, and B. Siciliano, “Non-prehensile object transportation via model predictive non-sliding manipulation control,”IEEE Trans. Control Syst. Technol., vol. 31, no. 5, pp. 2231–2244, 2023
2023
-
[5]
Non-prehensile planar ma- nipulation via trajectory optimization with complementarity constraints,
J. Moura, T. Stouraitis, and S. Vijayakumar, “Non-prehensile planar ma- nipulation via trajectory optimization with complementarity constraints,” in 2022 Int. Conf. Robot. Autom. , pp. 970–976, 2022
2022
-
[6]
Ott., Cartesian Impedance Control of Redundant and Flexible- Joint Robots, vol
C. Ott., Cartesian Impedance Control of Redundant and Flexible- Joint Robots, vol. 49. Springer Tracts in Advanced Robotics (STAR), 2008
2008
-
[7]
Port-based asymptotic curve tracking for mechanical systems,
V . Duindam and S. Stramigioli, “Port-based asymptotic curve tracking for mechanical systems,” European Journal of Control , vol. 10, no. 5, pp. 411–420, 2004
2004
-
[8]
Position drift compensation in port-hamiltonian based telemanipulation,
C. Secchi, S. Stramigioli, and C. Fantuzzi, “Position drift compensation in port-hamiltonian based telemanipulation,” Proc. IEEE/RSJ Int. Conf. Intell. Rob. Syst. , pp. 4211–4216, 2006
2006
-
[9]
A tank-based approach to impedance control with variable stiffness,
F. Ferraguti, C. Secchi, and C. Fantuzzi, “A tank-based approach to impedance control with variable stiffness,” in Proc. IEEE Int. Conf. Robot. Autom., pp. 4948–4953, 2013
2013
-
[10]
Dynamic manipulation,
M. T. Mason and K. M. Lynch, “Dynamic manipulation,” Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. , vol. 1, pp. 152–159, 1993
1993
-
[11]
Coordinate-free framework for robotic pizza tossing and catching,
A. Satici, F. Ruggiero, V . Lippiello, and B. Siciliano, “Coordinate-free framework for robotic pizza tossing and catching,” Proc. IEEE Int. Conf. Robot. Autom., pp. 3932–3939, 2016
2016
-
[12]
Quasi-direct nonprehensile catching with uncertain object states,
M. M. Schill, F. Gruber, and M. Buss, “Quasi-direct nonprehensile catching with uncertain object states,” Proc. IEEE Int. Conf. Robot. Autom., pp. 2468–2474, 2015
2015
-
[13]
Racket control and its experiments for robot playing table tennis,
C. Liu, Y . Hayakawa, and A. Nakashima, “Racket control and its experiments for robot playing table tennis,” Proc. IEEE Int. Conf. Robot. Biomim., pp. 241–246, 2012
2012
-
[14]
Linear time-varying mpc for nonprehensile object manipulation with a nonholonomic mobile robot,
F. Bertoncelli, F. Ruggiero, and L. Sabattini, “Linear time-varying mpc for nonprehensile object manipulation with a nonholonomic mobile robot,” Proc. IEEE Int. Conf. Robot. Autom. , pp. 11032–11038, 2020
2020
-
[15]
Control of nonprehensile planar rolling manipulation: A passivity-based approach,
D. Serra, F. Ruggiero, A. Donaire, L. Buonocore, V . Lippiello, and B. Siciliano, “Control of nonprehensile planar rolling manipulation: A passivity-based approach,” IEEE Trans. Robot., vol. 35, no. 2, pp. 317– 329, 2019
2019
-
[16]
Bicchi, D
A. Bicchi, D. Prattichizzo, and H. Christensen, Control of nonprehensile manipulation, ” in Control Problems in Robotics, vol. 4. Springer, 2003
2003
-
[17]
Mechanics and planning of manipulator pushing opera- tions,
M. T. Mason, “Mechanics and planning of manipulator pushing opera- tions,” Int. J. Robotics Res. , vol. 5, no. 3, pp. 53–71, 1986
1986
-
[18]
More than a million ways to be pushed. a high-fidelity experimental dataset of planar pushing,
K.-T. Yu, M. Bauz ´a, N. Fazeli, and A. Rodriguez, “More than a million ways to be pushed. a high-fidelity experimental dataset of planar pushing,” Proc. IEEE/RSJ Int. Conf. Intell. Rob. Syst. , pp. 30–37, 2016
2016
-
[19]
Stable pushing: Mechanics, controllability, and planning,
K. Lynch and M. Mason, “Stable pushing: Mechanics, controllability, and planning,” Int. J. Robot. Res. , vol. 15, no. 6, pp. 533–556, 1996
1996
-
[20]
Limit surface and moment function descriptions of planar sliding,
S. Goyal, A. Ruina, and J. Papadopoulos, “Limit surface and moment function descriptions of planar sliding,” IEEE Int. Conf. Robot. Autom. , pp. 794–799, 1989
1989
-
[21]
Fixture planning with friction,
S. Lee and M. Cutkosky, “Fixture planning with friction,” J. Manuf. Sci. Eng., vol. 113, no. 3, pp. 320–327, 1991. 16
1991
-
[22]
Pushing revisited: Differential flatness, trajectory planning, and stabilization,
J. Zhou, Y . Hou, and M. T. Mason, “Pushing revisited: Differential flatness, trajectory planning, and stabilization,” Int. J. Robotics Res. , vol. 38, no. 12-13, pp. 1477–1489, 2019
2019
-
[23]
A convex polynomial force-motion model for planar sliding: Identification and application,
J. Zhou, R. Paolini, J. A. Bagnell, and M. T. Mason, “A convex polynomial force-motion model for planar sliding: Identification and application,” IEEE Int. Conf. Robot. Autom. , pp. 372–377, 2016
2016
-
[24]
The mechanics of fine manipulation by pushing,
K. Lynch, “The mechanics of fine manipulation by pushing,” Proc. IEEE Int. Conf. Robot. Autom. , pp. 2269–2276, 1992
1992
-
[25]
Feedback control of the pusher slider system: A story of hybrid and underactuated contact dynamics,
F. R. Hogan and A. Rodriguez, “Feedback control of the pusher slider system: A story of hybrid and underactuated contact dynamics,” Algorithmic Foundations of Robotics XII , pp. 800–815, 2020
2020
-
[26]
Reactive planar non-prehensile manip- ulation with hybrid model predictive control,
F. R. Hogan and A. Rodriguez, “Reactive planar non-prehensile manip- ulation with hybrid model predictive control,” International Journal of Robotics Research, vol. 39, no. 7, pp. 755–773, 2020
2020
-
[27]
Towards tight convex relaxations for contact- rich manipulation,
B. P. Graesdal, S. Y . C. Chia, T. Marcucci, S. Morozov, A. Amice, P. A. Parrilo, and R. Tedrake, “Towards tight convex relaxations for contact- rich manipulation,” 2024
2024
-
[28]
Reactive planar manipu- lation with convex hybrid mpc,
F. R. Hogan, E. R. Grau, and A. Rodriguez, “Reactive planar manipu- lation with convex hybrid mpc,” in 2018 Proc. IEEE Int. Conf. Robot. Autom., pp. 247–253, 2018
2018
-
[29]
Impedance control: An approach to manipulation,
N. Hogan, “Impedance control: An approach to manipulation,” in 1984 American Control Conference, pp. 304–313, 1984
1984
-
[30]
A unified approach for motion and force control of robot manipulators: The operational space formulation,
O. Khatib, “A unified approach for motion and force control of robot manipulators: The operational space formulation,” IEEE Journal on Robotics and Automation , vol. 3, no. 1, pp. 43–53, 1987
1987
-
[31]
Walk-through programming for industrial applications,
F. Ferraguti, C. T. Landi, C. Secchi, C. Fantuzzi, M. Nolli, and M. Pesamosca, “Walk-through programming for industrial applications,” Procedia Manufacturing, vol. 11, pp. 31–38, 2017
2017
-
[32]
Passive virtual fixtures adaptation in minimally invasive robotic surgery,
M. Selvaggio, G. A. Fontanelli, F. Ficuciello, L. Villani, and B. Sicil- iano, “Passive virtual fixtures adaptation in minimally invasive robotic surgery,”IEEE Robot. Autom. Lett. , vol. 3, no. 4, pp. 3129–3136, 2018
2018
-
[33]
Unified force-impedance control,
S. Haddadin and E. Shahriari, “Unified force-impedance control,” Int. J. Robot. Res. , vol. 43, no. 13, pp. 2112–2141, 2024
2024
-
[34]
Model predictive impedance control,
M. Bednarczyk, H. Omran, and B. Bayle, “Model predictive impedance control,” in 2020 Proc. IEEE Int. Conf. Robot. Autom. , pp. 4702–4708, 2020
2020
-
[35]
Model predictive interaction control for robotic manipulation tasks,
T. Gold, A. V ¨olz, and K. Graichen, “Model predictive interaction control for robotic manipulation tasks,” IEEE Trans. Robot. , vol. 39, no. 1, pp. 76–89, 2023
2023
-
[36]
Introducing force feedback in model predictive control,
S. Kleff, E. Dantec, G. Saurel, N. Mansard, and L. Righetti, “Introducing force feedback in model predictive control,” inProc. IEEE/RSJ Int. Conf. Intell. Rob. Syst. , pp. 13379–13385, 2022
2022
-
[37]
Human-inspired non- prehensile manipulation strategies: Design, implementation, and eval- uation,
P. Bhat, M. Nieuwenhuisen, and D. Schulz, “Human-inspired non- prehensile manipulation strategies: Design, implementation, and eval- uation,” SN Computer Science , vol. 5, no. 70, 2024
2024
-
[38]
A variable admittance control strategy for stable physical human-robot interaction,
F. Ferraguti, C. T. Landi, L. Sabattini, M. Bonf `e, C. Fantuzzi, and C. Secchi, “A variable admittance control strategy for stable physical human-robot interaction,” Int. J. Robotics Res. , vol. 38, no. 6, pp. 747– 765, 2019
2019
-
[39]
Adapting to contacts: Energy tanks and task energy for passivity- based dynamic movement primitives,
E. Shahriari, A. Kramberger, A. Gams, A. Ude, and S. Haddadin, “Adapting to contacts: Energy tanks and task energy for passivity- based dynamic movement primitives,” inProc. IEEE-RAS 17th Int. Conf. Humanoid Robotics, pp. 136–142, 2017
2017
-
[40]
Power flow regulation, adaptation, and learning for intrinsically robust virtual energy tanks,
E. Shahriari, L. Johannsmeier, E. Jensen, and S. Haddadin, “Power flow regulation, adaptation, and learning for intrinsically robust virtual energy tanks,” IEEE Robot. Autom. Lett. , vol. 5, no. 1, pp. 211–218, 2020
2020
-
[41]
Passive hierarchical impedance control via energy tanks,
A. Dietrich, X. Wu, K. Bussmann, A. A.-S. C. Ott, and S. Stramigioli, “Passive hierarchical impedance control via energy tanks,” IEEE Robot. Autom. Lett., vol. 2, no. 2, pp. 522–529, 2017
2017
-
[42]
Energy tank- based policies for robust aerial physical interaction with moving objects,
M. Brunner, L. Giacomini, R. Siegwart, and M. Tognon, “Energy tank- based policies for robust aerial physical interaction with moving objects,” Proc. IEEE Int. Conf. Robot. Autom. , pp. 2054–2060, 2022
2054
-
[43]
R. M. Murray, S. S. Sastry, and L. Zexiang, A Mathematical Introduction to Robotic Manipulation . CRC Press, Inc., 1st ed., 1994
1994
-
[44]
Nonlinear model predictive control for robotic pushing of planar objects with generic shape,
S. Federico, M. Costanzo, M. De Simone, and C. Natale, “Nonlinear model predictive control for robotic pushing of planar objects with generic shape,” IEEE Robot. Autom. Lett. , vol. 10, no. 3, pp. 3006– 3013, 2025
2025
-
[45]
Siciliano, L
B. Siciliano, L. Sciavicco, L. Villani, and G. Oriolo, Robotics - Mod- elling, Planning and Control . Springer, 2009
2009
-
[46]
Passive-set-position-modulation framework for interactive robotic systems,
D. Lee and K. Huang, “Passive-set-position-modulation framework for interactive robotic systems,”IEEE Trans. Robot., vol. 26, no. 2, pp. 354– 369, 2010
2010
-
[47]
Lbr-stack: Ros 2 and python integration of kuka fri for med and iiwa robots,
M. Huber, C. E. Mower, S. Ourselin, T. Vercauteren, and C. Bergeles, “Lbr-stack: Ros 2 and python integration of kuka fri for med and iiwa robots,” Journal of Open Source Software, vol. 9, no. 103, p. 6138, 2024
2024
-
[48]
An omnibus test of normality for moderate and large sample sizes,
R. D’Agostino, “An omnibus test of normality for moderate and large sample sizes,” Biometrika, vol. 58, no. 34, pp. 1–348, 1971
1971
-
[49]
Tests for departure from normality. empirical results for the distributions of b2 and √ b1,
R. D’agostino and E. S. Pearson, “Tests for departure from normality. empirical results for the distributions of b2 and √ b1,” Biometrika, vol. 60, no. 3, pp. 613–622, 1973. Francesco Cufino is a PhD student with the de- partment of Electrical Engineering and Information Technology of the University of Naples Federico II, Naples, Italy. From the same inst...
1973
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.