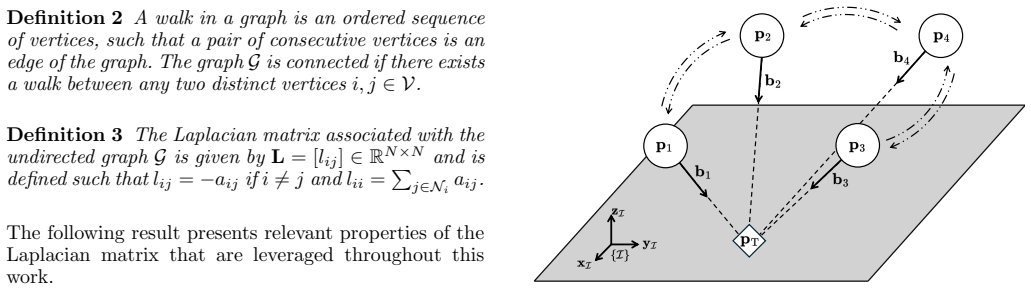
Distributed consensus-based observer design for target state estimation with bearing measurements
Pith reviewed 2026-05-25 08:23 UTC · model grok-4.3
The pith
A group of agents can track the full state of a target modeled as an integrator chain of any order using only bearing measurements and neighbor consensus, with uniform global exponential stability under formation conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
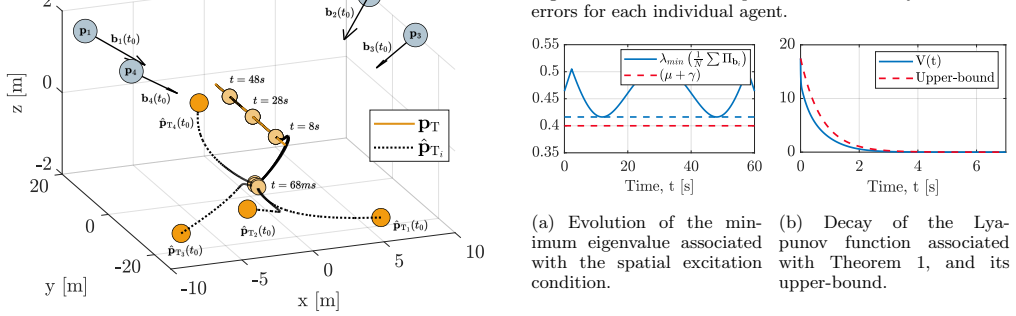
The authors introduce a continuous-time observer with a correction term that merges innovation from bearing vectors and consensus on partial state estimates. They prove uniform global exponential stability for the closed-loop error system via a novel result for nonlinear systems in generalized observer form. When applied to bearing-only target tracking with chain-of-integrator dynamics, the same result yields explicit stability conditions that depend on the target-agents geometric formation.
What carries the argument
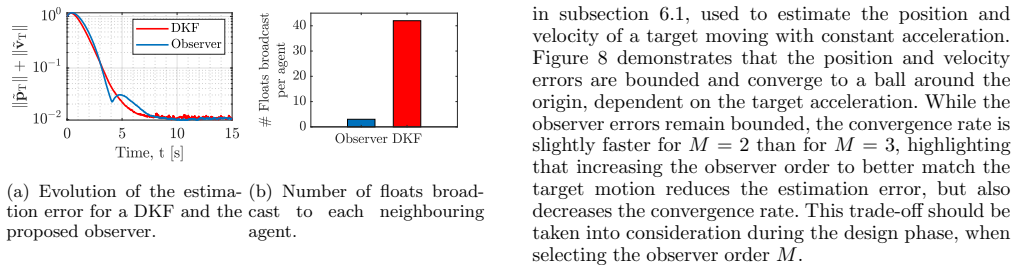
The innovation-consensus correction term, which uses orthogonal projection matrices on bearing measurements to drive the distributed error dynamics while broadcasting only part of each agent's state estimate.
If this is right
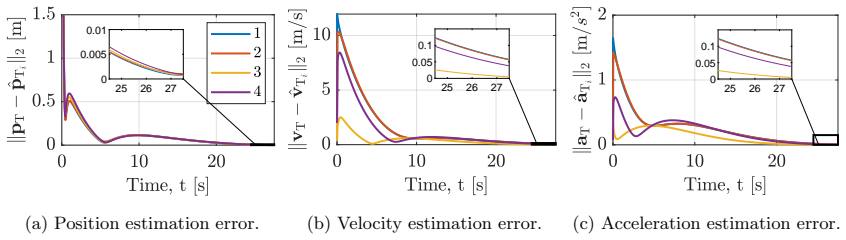
- Explicit gain-tuning rules exist for targets with first-, second-, and third-order integrator dynamics based solely on the agents' relative positions.
- Only a subset of the state estimate needs to be transmitted to neighbors, lowering network traffic while preserving stability.
- The stability guarantee holds uniformly for any initial condition once the formation and gain conditions are met.
- The same observer structure extends directly to integrator chains of arbitrary order.
Where Pith is reading between the lines
- The formation-dependent conditions could be monitored online to adapt gains if agents move relative to the target.
- The approach may connect to bearing-only localization problems where the target is replaced by an unknown landmark.
- Adding bounded measurement noise would require checking whether the exponential decay still dominates the perturbation terms.
Load-bearing premise
The communication network is undirected and connected, and the agents maintain a geometric formation relative to the target that satisfies the derived stability conditions on the observer gains.
What would settle it
Place the agents in a formation where the matrix constructed from the orthogonal projections and gains has at least one eigenvalue with non-negative real part, then check whether the estimation error fails to converge uniformly and exponentially to zero.
Figures

read the original abstract
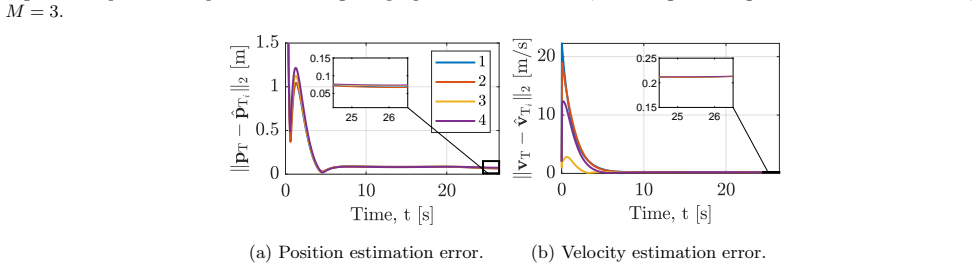
This paper introduces a novel distributed consensus-based observer design that enables a group of agents in an undirected communication network to solve the problem of target tracking, where the target is modelled as a chain of integrators of arbitrary order. Each agent is assumed to know its own position and simultaneously measure bearing vectors relative to the target. We start by introducing a general continuous time observer design tailored to systems whose state dynamics are modelled as chains of integrators and whose measurement model follows a particular nonlinear but observer-suited form. This design leverages a correction term that combines innovation and consensus components, allowing each agent to broadcast only a part of the state estimate to its neighbours, which effectively reduces the data flowing across the network. To provide uniform global exponential stability guarantees, a novel result for a class of nonlinear closed-loop systems in a generalized observer form is introduced and subsequently used as the main tool to derive stability conditions on the observer gains. Then, by exploring the properties of orthogonal projection matrices, the proposed design is used to solve the distributed target tracking problem and provide explicit stability conditions that depend on the target-agents geometric formation. Practical examples are derived for a target modelled as first-, second-, and third-order integrator dynamics, highlighting the design procedure and the stability conditions imposed. Finally, numerical results showcase the properties of the proposed algorithm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to introduce a distributed consensus-based observer design enabling a group of agents in an undirected connected network to estimate the state of a target modeled as a chain of integrators of arbitrary order, using only bearing measurements and local position knowledge. The design employs a correction term mixing innovation and partial-state consensus (broadcasting only part of the estimate). A novel theorem establishing uniform global exponential stability (UGES) for nonlinear closed-loop systems in a generalized observer form is introduced and applied, via orthogonal projection matrices, to derive explicit stability conditions dependent on the target-agents geometric formation. Practical cases for first-, second- and third-order integrators are derived, with numerical simulations provided.
Significance. If the novel UGES theorem holds with the stated conditions, the work provides a useful extension of distributed observer design to bearing-only target tracking for arbitrary-order integrator chains, with reduced communication and explicit geometry-dependent gains. The theorem itself may serve as a reusable tool for stability analysis in other nonlinear observer problems. The combination of consensus with innovation and the projection-based specialization to bearings is a coherent construction that addresses practical constraints in multi-agent estimation.
minor comments (2)
- [Abstract] Abstract: the phrase 'post-hoc gain conditions' is mentioned without indicating whether they follow directly from the novel theorem or require separate verification; a brief clarification would improve readability.
- The stability conditions are stated to depend on geometric formation; an explicit statement of the minimal formation rank or persistence condition (e.g., in the theorem statement) would help readers apply the result without ambiguity.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of the manuscript, the accurate summary of its contributions, and the recommendation of minor revision. No major comments were listed in the report.
Circularity Check
No significant circularity; derivation self-contained
full rationale
The paper constructs a general observer for integrator chains, introduces an original UGES theorem for a generalized nonlinear observer form, and specializes it to bearing measurements via projection matrices, with stability conditions stated as explicit functions of the target-agents geometry. No step reduces a prediction to a fitted input by construction, no load-bearing claim rests solely on self-citation, and the novel theorem is presented as an independent contribution rather than derived from prior author work. The chain is externally grounded in the stated assumptions on network connectivity and formation geometry.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The communication graph is undirected and connected.
- ad hoc to paper A novel result exists for uniform global exponential stability of a class of nonlinear closed-loop systems in generalized observer form.
Reference graph
Works this paper leans on
-
[1]
Batista, P., Silvestre, C. & Oliveira, P. (2011), Globally asymptotically stable filters for source localization and navigation aided by direction measurements, in ‘2011 50th IEEE Conference on Decision and Control and European Control Conference’, pp. 8151–8156. 14
work page 2011
-
[2]
Batista, P., Silvestre, C. & Oliveira, P. (2013), GES source localization and navigation based on discrete- time bearing measurements, in ‘52nd IEEE Confer- ence on Decision and Control’, pp. 5066–5071
work page 2013
-
[3]
Graziano, A. (2015), ‘Consensus-based linear and non- linear filtering’, IEEE Transactions on Automatic Control 60(5), 1410–1415
work page 2015
-
[4]
Boyd, S., El Ghaoui, L., Feron, E. & Balakrishnan, V. (1994), Linear Matrix Inequalities in System and Con- trol Theory, Vol. 15 of Studies in Applied Mathemat- ics, Society for Industrial and Applied Mathematics (SIAM)
work page 1994
-
[5]
(2024), Lectures on Network Systems , 1 edn, Kindle Direct Publishing
Bullo, F. (2024), Lectures on Network Systems , 1 edn, Kindle Direct Publishing
work page 2024
- [6]
-
[7]
(1999), ‘Target tracking with bearings - Only measurements’, Signal Processing 78(1), 61–78
Farina, A. (1999), ‘Target tracking with bearings - Only measurements’, Signal Processing 78(1), 61–78
work page 1999
- [8]
- [9]
-
[10]
JingPing, S. & Yu-Ping, T. (2018), ‘Multi-target local- isation and circumnavigation by a multi-agent sys- tem with bearing measurements in 2D space’, Inter- national Journal of Systems Science 49(1), 15–26
work page 2018
-
[11]
Khalil, H. K. (2002),Nonlinear systems, 3 edn, Prentice-
work page 2002
-
[12]
Khan, U. A., Kar, S., Jadbabaie, A. & Moura, J. M. F. (2010), On connectivity, observability, and stability in distributed estimation, in ‘49th IEEE Conference on Decision and Control (CDC)’, pp. 6639–6644. Le Bras, F., Mahony, R., Hamel, T. & Binetti, P. (2006), Adaptive filtering and image based visual servo con- trol of a ducted fan flying robot, in ‘P...
work page 2010
- [13]
-
[14]
Rego, F. F. (2023), ‘Distributed observers for LTV sys- tems: A distributed constructibility gramian based ap- proach’, Automatica 155, 111117
work page 2023
-
[15]
Rego, F. F., Pascoal, A. M., Aguiar, A. P. & Jones, C. N. (2019), ‘Distributed state estimation for discrete-time linear time invariant systems: A survey’, Annual Re- views in Control 48, 36–56
work page 2019
-
[16]
Hamel, T. (2024), Observer-based control of second- order multi-vehicle systems in bearing-persistently ex- citing formations, in ‘2024 IEEE 63rd Conference on Decision and Control (CDC)’, pp. 7522–7527
work page 2024
- [17]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.