Adaptive Covariance Kalman Filtering and Nonlinear Decoupling Control via Feedback Linearization for a Three-Tank Process
Pith reviewed 2026-05-24 09:04 UTC · model grok-4.3
The pith
Exact linearization and decoupling control let a three-tank system track dynamic liquid level references, with an adaptive Kalman filter estimating the nonlinear states.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
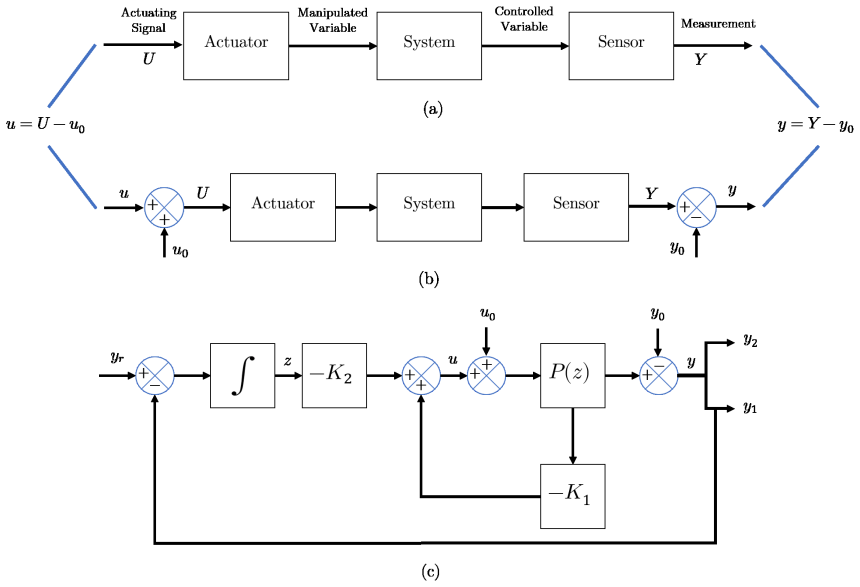
The authors establish that exact linearization and input-output decoupling applied to the three-tank dynamics produce a set of independent linear subsystems whose states can be regulated by linear feedback to follow dynamic references. The adaptive system-noise Kalman filter applied to the original nonlinear plant then produces estimates that match the true nonlinear trajectories with good accuracy.
What carries the argument
exact linearization and decoupling control of the three-tank nonlinear model, combined with an adaptive Kalman filter that estimates states of the original nonlinear system
If this is right
- The closed-loop system tracks the commanded dynamic reference signals for the three tank levels.
- The adaptive Kalman filter produces estimates that match the true nonlinear plant behavior.
- The linearizing controller and filter operate together on the standard three-tank benchmark under the stated model assumptions.
Where Pith is reading between the lines
- The same linearization-plus-adaptive-filter structure could be tested on other coupled-tank or multi-vessel liquid systems that share similar nonlinear flow equations.
- Adding online adaptation of the linearization point might extend the region where the method stays accurate when references move over wider ranges.
- Hardware experiments on a physical three-tank rig would reveal how sensor noise and unmodeled valve dynamics affect the reported tracking and estimation performance.
Load-bearing premise
The nonlinear model of the three-tank system is known exactly and the linearization remains valid across the operating range of the references.
What would settle it
A closed-loop simulation or experiment in which the tank levels deviate from the commanded dynamic references by amounts that grow or remain large instead of converging.
Figures







read the original abstract
Hydraulic three-tank systems are widely used in water treatment and liquid storage applications, where accurate level regulation is essential for safe and efficient operation. This paper investigates linear and nonlinear control strategies for reference tracking in a three-tank process. A linear state-feedback controller with integral action is first designed based on a linearized model, followed by a nonlinear decoupling controller using feedback linearization. In addition, an adaptive covariance Kalman filter (AKF) is employed for state estimation by dynamically updating the process-noise covariance matrix. Numerical simulations demonstrate that both control approaches achieve satisfactory reference tracking, while the proposed AKF provides accurate state estimation and effectively captures the nonlinear system behavior. The results highlight the effectiveness of combining nonlinear control and adaptive state estimation for hydraulic process systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes combining exact input-output linearization with decoupling control for a three-tank hydraulic system to track dynamic reference signals, under unspecified assumptions. It then applies an adaptive system-noise Kalman filter (AKF) to the original nonlinear plant and claims that the designed methods successfully trace the references while the AKF yields rewarding state predictions.
Significance. If the relative-degree and decoupling-matrix conditions are verified and quantitative tracking/estimation metrics with baselines are supplied, the combination could provide a concrete demonstration of feedback linearization plus adaptive filtering for MIMO process control. The work does not yet supply those elements, so its contribution remains difficult to gauge against existing three-tank control literature.
major comments (2)
- [Abstract] Abstract: the central claim that 'the designed methods have successfully traced the dynamic reference signals' and that AKF 'yields a rewarding prediction' is asserted without any quantitative metrics, error statistics, comparison baselines, or operating-point data. This absence makes the performance statements unverifiable and load-bearing for the paper's contribution.
- [Abstract / linearization derivation] Abstract and linearization section: exact input-output linearization plus decoupling is invoked 'under some assumptions,' yet the manuscript does not state the vector relative degree, confirm it equals the number of outputs along the chosen trajectories, or demonstrate that the decoupling matrix remains nonsingular in the operating region. These conditions are required for the transformed system to be linear; without verification the tracking result does not follow.
minor comments (1)
- [Abstract] Abstract contains several grammatical and phrasing issues (e.g., 'To deal with, the optimal linear control...') that should be corrected for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below and will incorporate revisions to strengthen the paper.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'the designed methods have successfully traced the dynamic reference signals' and that AKF 'yields a rewarding prediction' is asserted without any quantitative metrics, error statistics, comparison baselines, or operating-point data. This absence makes the performance statements unverifiable and load-bearing for the paper's contribution.
Authors: We agree that quantitative metrics are essential to substantiate the claims. In the revised manuscript, we will add RMSE and other error statistics for both tracking and state estimation, include comparisons against baselines such as standard Kalman filtering and non-adaptive decoupling control, and specify the operating points and reference trajectories used in the simulations. revision: yes
-
Referee: [Abstract / linearization derivation] Abstract and linearization section: exact input-output linearization plus decoupling is invoked 'under some assumptions,' yet the manuscript does not state the vector relative degree, confirm it equals the number of outputs along the chosen trajectories, or demonstrate that the decoupling matrix remains nonsingular in the operating region. These conditions are required for the transformed system to be linear; without verification the tracking result does not follow.
Authors: The referee is correct that explicit verification of the linearization conditions is required. We will revise the linearization section to state the vector relative degree of the three-tank MIMO system, confirm that it equals the number of outputs, and demonstrate nonsingularity of the decoupling matrix over the operating region of interest. revision: yes
Circularity Check
No circularity; derivation chain is self-contained
full rationale
The paper applies exact linearization plus decoupling to the three-tank model under stated assumptions, then deploys AKF for state estimation on the original nonlinear plant. No equations or claims reduce a reported prediction to a fitted parameter by construction, nor does any load-bearing premise rest on a self-citation chain. The tracking and estimation results are presented as outcomes of the combined controller/estimator applied to the plant; the derivation does not collapse into its own inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
exact linearization with decoupled control applying a constant feedback u = α(x) + β(x)ζ ... Λ(x) ... rank of Λ(x) strictly equals to m
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the adaptive covariance matrix of process noise Q is iteratively designed ... ˆQk ≈ 1/Ψ ∑ Δxi Δxi⊤
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.