Steerable Radiation Forces with Frequency-Detuned Acoustic Metasurfaces
Pith reviewed 2026-06-26 11:02 UTC · model grok-4.3
The pith
Patterning objects with acoustic metasurfaces turns small frequency detunings into reversible steering forces and torques.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
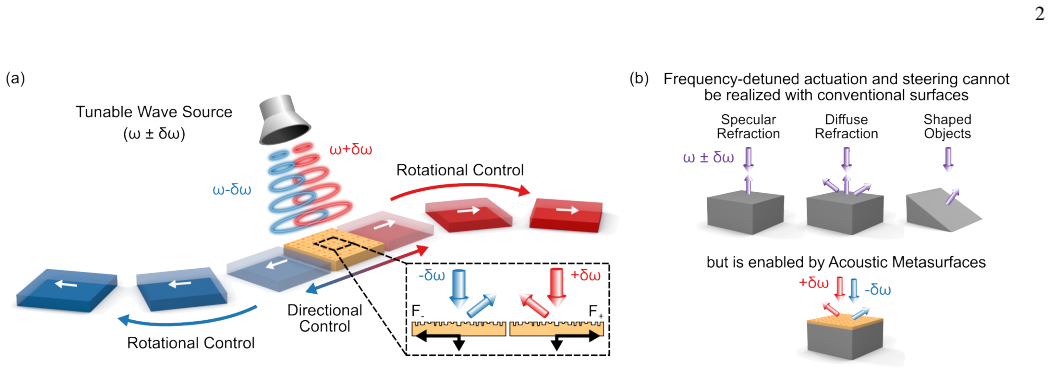
Acoustic waves can induce controlled translation and rotation of macroscopic objects through small, but deliberate, detuning of the driving wave frequency. When an object is patterned with a suitably designed acoustic metasurface, small changes in the incident frequency ω ± δω are converted into directional radiation forces and torques, enabling steerable motion even for objects much larger than the acoustic wavelength. The concept of a force-optimal metasurface topology enables fully reversible forces in real time: the object is moved in one direction for positively detuned incident frequency ω+δω and in the opposite direction for negatively detuned frequency ω−δω, where ω=22.5 kHz and δω=2
What carries the argument
The force-optimal metasurface topology that converts frequency detuning into directional radiation forces and torques.
If this is right
- The object translates and rotates in opposite directions for positive versus negative frequency detuning.
- Fully reversible real-time steering is achieved without altering wave direction or intensity.
- The approach scales across frequencies and materials.
- Complex remote-controlled behaviors become programmable through surface pattern choices.
Where Pith is reading between the lines
- Frequency-based steering could combine with existing acoustic sources to control multiple objects tuned to different base frequencies at once.
- If surface patterns can be switched dynamically, the same object could follow changing paths without external sensors.
- The method may extend contactless transport techniques to objects too large for conventional acoustic trapping.
Load-bearing premise
A force-optimal metasurface topology exists that converts frequency detuning into fully reversible directional forces.
What would settle it
An experiment in which the force direction fails to reverse when the sign of the frequency detuning is flipped on an object carrying the designed metasurface.
Figures
read the original abstract
We demonstrate that acoustic waves can induce controlled translation and rotation of macroscopic objects through small, but deliberate, detuning of the driving wave frequency. When an object is patterned with a suitably designed acoustic metasurface, small changes in the incident frequency $\omega \pm \delta \omega$ are converted into directional radiation forces and torques, enabling steerable motion even for objects much larger than the acoustic wavelength. We present the concept of a force-optimal metasurface topology and show that it enables fully reversible forces in real time: the object is moved in one direction for positively detuned incident frequency $\omega+\delta \omega$ and in the opposite direction for negatively detuned frequency $\omega-\delta \omega$, where $\omega=22.5 \textrm{ kHz}$ and $\delta \omega =2.5 \textrm{ kHz}$ for a proof of concept at inaudible frequencies. This mechanism is demonstrated experimentally at ultrasonic frequencies with 3D-printed metasurfaces. The proposed concept is scalable across frequencies and materials, offering a building block for realizing complex, remote-controlled, dynamical behaviors that can be programmed by reconfiguring material surface patterns.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that patterning macroscopic objects with acoustic metasurfaces allows small frequency detunings (ω ± δω around 22.5 kHz with δω = 2.5 kHz) to produce directional radiation forces and torques for steerable translation and rotation, even for objects much larger than the wavelength. It introduces a force-optimal metasurface topology enabling fully reversible forces (positive detuning moves the object one way, negative the opposite) and reports an experimental demonstration using 3D-printed metasurfaces at ultrasonic frequencies, with the approach presented as scalable.
Significance. If the central experimental claim holds, the work would introduce a frequency-based mechanism for remote acoustic manipulation of large objects without requiring mechanical reconfiguration, offering a building block for programmable dynamical behaviors. The scalability across frequencies and materials is a notable strength, as is the focus on reversible, real-time steering via detuning.
major comments (2)
- [Abstract] Abstract: The manuscript asserts an experimental demonstration with 3D-printed metasurfaces at the specified frequencies but supplies no quantitative force measurements, error bars, design parameters of the metasurface, or comparison between experiment and simulation, rendering the central claim of steerable motion unverifiable from the provided text.
- [Concept and proof of concept] Concept and proof of concept paragraph: The claim that a force-optimal metasurface topology exists which converts frequency detuning into fully reversible directional forces satisfying F(ω + δω) = -F(ω - δω) with comparable magnitude over the 11% detuning range lacks supporting analytical derivation, numerical optimization results, or experimental verification that sign reversal occurs without residual net force or magnitude imbalance due to frequency-dependent effects.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The comments highlight areas where the presentation of evidence can be strengthened for clarity. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract: The manuscript asserts an experimental demonstration with 3D-printed metasurfaces at the specified frequencies but supplies no quantitative force measurements, error bars, design parameters of the metasurface, or comparison between experiment and simulation, rendering the central claim of steerable motion unverifiable from the provided text.
Authors: We agree that the abstract would be more informative if it included key quantitative results. The full manuscript contains experimental force data, error analysis, metasurface design parameters, and simulation comparisons in the results section and figures. In revision we will update the abstract to report representative measured force magnitudes (with error bars), the 11% detuning range, and a statement on experiment-simulation agreement. revision: yes
-
Referee: [Concept and proof of concept] Concept and proof of concept paragraph: The claim that a force-optimal metasurface topology exists which converts frequency detuning into fully reversible directional forces satisfying F(ω + δω) = -F(ω - δω) with comparable magnitude over the 11% detuning range lacks supporting analytical derivation, numerical optimization results, or experimental verification that sign reversal occurs without residual net force or magnitude imbalance due to frequency-dependent effects.
Authors: The manuscript demonstrates the force-optimal topology and reversible behavior through numerical optimization and experiments, including data confirming sign reversal and comparable magnitudes. However, an explicit analytical derivation of the exact antisymmetry condition F(ω + δω) = -F(ω - δω) is not provided in the main text. We will add a concise analytical model and the optimization procedure to the revised manuscript (or supplementary information) to address this gap while retaining the existing numerical and experimental evidence. revision: partial
Circularity Check
No circularity: experimental demonstration with no self-referential derivation or fitted predictions
full rationale
The paper's central claim rests on presenting a metasurface concept and demonstrating it experimentally with 3D-printed samples at ultrasonic frequencies. No equations, parameters, or derivations are shown that reduce to inputs by construction. No self-citations are invoked as load-bearing for uniqueness or ansatz. The result is self-contained against external benchmarks via physical experiment rather than internal fitting or renaming.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Linear acoustic wave propagation and momentum transfer via scattering
- domain assumption Existence of a metasurface geometry that maps frequency offset to force direction reversal
Reference graph
Works this paper leans on
-
[1]
E. H. Brandt, Suspended by sound, Nature413, 474 (2001)
2001
-
[2]
Baresch, J.-L
D. Baresch, J.-L. Thomas, and R. Marchiano, Observation of a single-beam gradient force acoustical trap for elastic particles: Acoustical tweezers, Phys. Rev. Lett.116, 024301 (2016)
2016
-
[3]
Marzo, A
A. Marzo, A. Barnes, and B. W. Drinkwater, TinyLev: A multi- emitter single-axis acoustic levitator, Rev. Sci. Instrum.88, 085105 (2017)
2017
-
[4]
M. A. B. Andrade, A. Marzo, and J. C. Adamowski, Acoustic levitation in mid-air: Recent advances, challenges, and future perspectives, Appl. Phys. Lett.116, 250501 (2020)
2020
-
[5]
Anh ¨auser, R
A. Anh ¨auser, R. Wunenburger, and E. Brasselet, Acoustic ro- tational manipulation using orbital angular momentum transfer, Phys. Rev. Lett.109, 034301 (2012)
2012
-
[6]
Foresti and D
D. Foresti and D. Poulikakos, Acoustophoretic contactless eleva- tion, orbital transport and spinning of matter in air, Phys. Rev. Lett. 112, 024301 (2014)
2014
-
[7]
Melde, A
K. Melde, A. G. Mark, T. Qiu, and P. Fischer, Holograms for acoustics, Nature537, 518 (2016)
2016
-
[8]
Baresch, J.-L
D. Baresch, J.-L. Thomas, and R. Marchiano, Orbital angular momentum transfer to stably trapped elastic particles in acoustical vortex beams, Phys. Rev. Lett.121, 074301 (2018)
2018
-
[9]
Baresch and V
D. Baresch and V . Garbin, Acoustic trapping of microbubbles in complex environments and controlled payload release, Proc. Natl. Acad. Sci. U. S. A.117, 15490 (2020)
2020
-
[10]
J. Li, C. Shen, T. J. Huang, and S. A. Cummer, Acoustic tweezer with complex boundary-free trapping and transport channel con- trolled by shadow waveguides, Sci Adv7, 10.1126/sciadv.abi5502 (2021). 8
-
[11]
Z. Yang, K. L. H. Cole, Y . Qiu, I. M. L. Somorjai, P. Wijesinghe, J. Nylk, S. Cochran, G. C. Spalding, D. A. Lyons, and K. Dholakia, Light sheet microscopy with acoustic sample confinement, Nat. Commun.10, 669 (2019)
2019
-
[12]
Hoshi, M
T. Hoshi, M. Takahashi, T. Iwamoto, and H. Shinoda, Noncontact tactile display based on radiation pressure of airborne ultrasound, IEEE Trans. Haptics3, 155 (2010)
2010
-
[13]
Hirayama, D
R. Hirayama, D. Martinez Plasencia, N. Masuda, and S. Subrama- nian, A volumetric display for visual, tactile and audio presentation using acoustic trapping, Nature575, 320 (2019)
2019
-
[14]
Fushimi, A
T. Fushimi, A. Marzo, B. W. Drinkwater, and T. L. Hill, Acoustophoretic volumetric displays using a fast-moving levitated particle, Appl. Phys. Lett.115, 064101 (2019)
2019
-
[15]
Vandaele, P
V . Vandaele, P. Lambert, and A. Delchambre, Non-contact han- dling in microassembly: Acoustical levitation, Precis. Eng.29, 491 (2005)
2005
-
[16]
M. X. Lim, A. Souslov, V . Vitelli, and H. M. Jaeger, Cluster formation by acoustic forces and active fluctuations in levitated granular matter, Nat. Phys.15, 460 (2019)
2019
-
[17]
Y . Xie, W. Wang, H. Chen, A. Konneker, B.-I. Popa, and S. A. Cummer, Wavefront modulation and subwavelength diffractive acoustics with an acoustic metasurface, Nat. Commun.5, 5553 (2014)
2014
-
[18]
G. Ma, M. Yang, S. Xiao, Z. Yang, and P. Sheng, Acoustic meta- surface with hybrid resonances, Nat. Mater.13, 873 (2014)
2014
-
[19]
S. A. Cummer, J. Christensen, and A. Al`u, Controlling sound with acoustic metamaterials, Nature Reviews Materials1, 1 (2016)
2016
-
[20]
Z. J. Wong, Y . Wang, K. O’Brien, J. Rho, X. Yin, S. Zhang, N. Fang, T.-J. Yen, and X. Zhang, Optical and acoustic metamate- rials: superlens, negative refractive index and invisibility cloak, J. Opt.19, 084007 (2017)
2017
-
[21]
H. Ge, M. Yang, C. Ma, M.-H. Lu, Y .-F. Chen, N. Fang, and P. Sheng, Breaking the barriers: advances in acoustic functional materials, Natl. Sci. Rev.5, 159 (2018)
2018
-
[22]
Stein, S
M. Stein, S. Keller, Y . Luo, and O. Ilic, Shaping contactless radia- tion forces through anomalous acoustic scattering, Nat. Commun. 13, 6533 (2022)
2022
-
[23]
Assouar, B
B. Assouar, B. Liang, Y . Wu, Y . Li, J.-C. Cheng, and Y . Jing, Acoustic metasurfaces, Nature Reviews Materials3, 460 (2018)
2018
-
[24]
Zhu, X.-D
Y .-F. Zhu, X.-D. Fan, B. Liang, J. Yang, J. Yang, L.-L. Yin, and J.- C. Cheng, Multi-frequency acoustic metasurface for extraordinary reflection and sound focusing, AIP Adv.6, 121702 (2016)
2016
-
[25]
Zhang and C
D. Zhang and C. Ma, Acoustic metamaterials for remote manipu- lation of large objects in water, Mater. Horiz.12, 4639 (2025)
2025
-
[26]
Ilic and H
O. Ilic and H. A. Atwater, Self-stabilizing photonic levitation and propulsion of nanostructured macroscopic objects, Nat. Photonics 13, 289 (2019)
2019
-
[27]
Siegel, A
J. Siegel, A. Y . Wang, S. G. Menabde, M. A. Kats, M. S. Jang, and V . W. Brar, Self-stabilizing laser sails based on optical metasur- faces, ACS Photonics6, 2032 (2019)
2032
-
[28]
See Supplemental Material at [URL will be inserted by publisher] for details on optimized metasurfaces and the experimental setup
-
[29]
Glynne-Jones, P
P. Glynne-Jones, P. P. Mishra, R. J. Boltryk, and M. Hill, Efficient finite element modeling of radiation forces on elastic particles of arbitrary size and geometry, J. Acoust. Soc. Am.133, 1885 (2013)
2013
-
[30]
T. H. Rowan,Functional stability analysis of numerical algo- rithms, Ph.D. thesis, The University of Texas at Austin, Austin, Texas, USA (1990)
1990
-
[31]
S. G. Johnson, The NLopt nonlinear-optimization package, http: //ab-initio.mit.edu/nlopt
-
[32]
Bertoldi, V
K. Bertoldi, V . Vitelli, J. Christensen, and M. van Hecke, Flexible mechanical metamaterials, Nature Reviews Materials2, 1 (2017)
2017
-
[33]
Y . Jin, R. Kumar, O. Poncelet, O. Mondain-Monval, and T. Brunet, Flat acoustics with soft gradient-index metasurfaces, Nat. Com- mun.10, 143 (2019)
2019
-
[34]
Nassar, B
H. Nassar, B. Yousefzadeh, R. Fleury, M. Ruzzene, A. Al `u, C. Daraio, A. N. Norris, G. Huang, and M. R. Haberman, Nonre- ciprocity in acoustic and elastic materials, Nature Reviews Materi- als5, 667 (2020)
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.