L-PCN: A Point Cloud Accelerator Exploiting Spatial Locality through Octree-based Islandization
Pith reviewed 2026-05-10 15:24 UTC · model grok-4.3
The pith
L-PCN partitions point clouds into octree islands to reuse overlapping subset data and cut repetitive feature operations in PCNs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
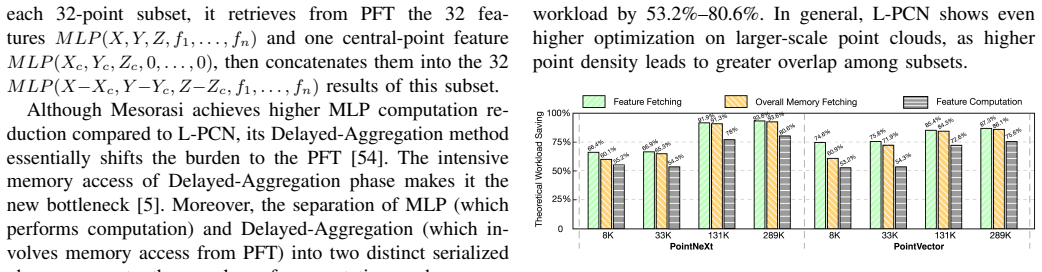
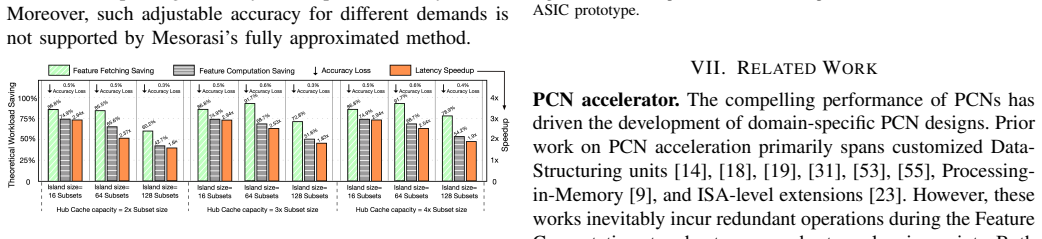
Octree-based Islandization partitions a point cloud so that point subsets inside the same island exhibit strong spatial correlation; Hub-based Scheduling then dynamically caches, updates, and reuses the repeated data within each island. Together these steps reduce feature fetching by 55.2 percent to 93.8 percent and feature computation by 45.4 percent to 80.6 percent during the full PCN process, and they deliver 1.2x to 3.2x additional speedup when the Islandization Unit is inserted as a plug-in into state-of-the-art PCN accelerators running on an Intel Arria 10 GX FPGA.
What carries the argument
The Islandization Unit, which performs Octree-based Islandization to create spatially correlated islands and Hub-based Scheduling to exploit intra-island data reuse.
If this is right
- Existing PCN accelerators gain 1.2x to 3.2x speedup simply by adding the Islandization Unit as a plug-in.
- Feature fetching and computation volumes drop by tens of percent without changing the underlying PCN algorithms.
- The same island-level reuse pattern applies to common PCN tasks such as shape classification and part segmentation.
- Hardware implementations on FPGA confirm that the theoretical savings appear in real execution time.
Where Pith is reading between the lines
- The same octree partitioning could reduce off-chip memory traffic for PCN inference on bandwidth-limited edge hardware.
- Similar explicit spatial grouping might help accelerators for other irregular spatial data such as meshes or graphs.
- If island size and overlap statistics vary widely across datasets, a dynamic island-size tuner could further stabilize gains.
- The approach highlights that data-structuring locality in point clouds is a first-class target for co-designed accelerators.
Load-bearing premise
The spatial locality created by overlapping point subsets in data structuring is both large enough and stable enough that the added partitioning and scheduling overhead never offsets the reported savings.
What would settle it
Run the Islandization Unit on a point-cloud workload whose gathered subsets show far less overlap than the tested cases and check whether measured speedup drops below 1.2x or whether partitioning time dominates total runtime.
Figures





















read the original abstract
Existing Point Cloud Networks (PCNs) have proven to achieve great success in many point cloud tasks such as object part segmentation, shape classification, and so on. The most popular point-based PCNs are usually composed of two sequential steps: Data Structuring (DS) and Feature Computation (FC). In this paper, we first describe an important characteristic of the PCN-specific DS step that has not been addressed in existing PCN accelerators: the spatial locality resulting from overlapping points of the gathered point subsets. Using algorithm-hardware co-design, L-PCN (Locality-aware PCN) proposes two novel techniques to exploit this characteristic to reduce the large amount of repetitive operations in the overall PCN. The first of which is a point cloud partitioning technique, Octree-based Islandization. Using Octree-based adjacency gathering, a point cloud is partitioned into islands in L-PCN, where the point subsets inside the same island exhibit a strong spatial correlation. After partitioning, L-PCN performs the rest of PCN steps at the granularity of islands. The second method of L-PCN is scheduling the intra-island computation with a Hub-based Scheduling to exploit the intra-island data reuse by dynamically caching, updating, and reusing the repeated data. The two methods are implemented in an Islandization Unit, which can be seamlessly integrated into standard PCN workflow. Our evaluation shows that based on our methods for exploiting spatial locality, L-PCN achieves a theoretical reduction in feature fetching ranging from 55.2% to 93.8% and in feature computation ranging from 45.4% to 80.6% during the PCN process. For experimentation, prototype L-PCN accelerators are implemented on the Intel Arria 10 GX FPGA. Experimental results prove that with the Islandization Unit as a plug-in, state-of-the-art PCN accelerators can achieve an additional speedup ranging from 1.2x to 3.2x.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents L-PCN, a locality-aware accelerator for point cloud networks (PCNs) consisting of data structuring (DS) and feature computation (FC) steps. It identifies spatial locality from overlapping point subsets in DS and proposes Octree-based Islandization to partition into correlated 'islands' and Hub-based Scheduling for intra-island reuse via dynamic caching. Implemented as a plug-in Islandization Unit, it claims theoretical reductions of 55.2%-93.8% in feature fetching and 45.4%-80.6% in feature computation, with FPGA experiments showing 1.2x-3.2x additional speedup on state-of-the-art PCN accelerators.
Significance. If the overheads of the proposed techniques prove smaller than the savings across typical workloads, this work could meaningfully advance hardware acceleration for PCNs by exploiting an under-addressed characteristic of the DS step. The co-design approach and plug-in compatibility with existing accelerators are positive aspects that could facilitate adoption. The FPGA implementation on Arria 10 GX provides a practical demonstration, though verification of net gains is needed.
major comments (3)
- [Abstract] Abstract: The ranges for theoretical reductions in feature fetching (55.2%-93.8%) and feature computation (45.4%-80.6%) are stated without derivation details, assumptions (e.g., overlap factors, point density, neighbor radius, or cache hit rates), or workload statistics. These percentages are load-bearing for the central claim that locality exploitation yields net gains.
- [Evaluation] Evaluation section: The reported speedups (1.2x-3.2x) lack a breakdown of execution time or resource usage for the Islandization Unit (octree construction, partitioning, hub scheduling, dynamic caching) versus the DS/FC savings. Without this, it cannot be verified that added costs do not offset benefits for varying point densities or PCN layers.
- [Evaluation] Evaluation section: Workload details (point cloud sizes, datasets, PCN layer counts), baseline accelerator descriptions, and error bars/variance on speedup measurements are absent. These omissions undermine assessment of the robustness of the claimed speedups.
minor comments (1)
- [Abstract] The abstract introduces the 'Islandization Unit' without a concise description of its integration point in the standard PCN workflow or a forward reference to the relevant figure or section.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will incorporate revisions to provide the requested details and breakdowns, strengthening the presentation of our results.
read point-by-point responses
-
Referee: [Abstract] Abstract: The ranges for theoretical reductions in feature fetching (55.2%-93.8%) and feature computation (45.4%-80.6%) are stated without derivation details, assumptions (e.g., overlap factors, point density, neighbor radius, or cache hit rates), or workload statistics. These percentages are load-bearing for the central claim that locality exploitation yields net gains.
Authors: We agree that the abstract would benefit from additional context on these ranges. The percentages are derived from an analytical model of point subset overlaps under octree-based partitioning, using standard PCN parameters (k-nearest neighbors with radius 0.2-0.5, point densities from ModelNet40 and ShapeNet, and cache hit rates based on intra-island correlation). In the revised version, we will add a concise derivation summary and key assumptions to the abstract while expanding the full formulas, workload statistics, and sensitivity analysis in Section 4 (Evaluation). revision: yes
-
Referee: [Evaluation] Evaluation section: The reported speedups (1.2x-3.2x) lack a breakdown of execution time or resource usage for the Islandization Unit (octree construction, partitioning, hub scheduling, dynamic caching) versus the DS/FC savings. Without this, it cannot be verified that added costs do not offset benefits for varying point densities or PCN layers.
Authors: This is a fair point for verifying net gains. The current manuscript reports aggregate speedups on the Arria 10 GX but does not isolate Islandization Unit overheads. We will revise the evaluation section to include a detailed breakdown: cycle counts and resource utilization (LUTs, DSPs, BRAMs) for octree construction, partitioning, and hub scheduling; net speedup after overhead subtraction; and results across varying point densities (1024-8192 points) and PCN layers. This will confirm that DS/FC savings exceed the added costs in the evaluated cases. revision: yes
-
Referee: [Evaluation] Evaluation section: Workload details (point cloud sizes, datasets, PCN layer counts), baseline accelerator descriptions, and error bars/variance on speedup measurements are absent. These omissions undermine assessment of the robustness of the claimed speedups.
Authors: We acknowledge these omissions limit robustness assessment. The revised evaluation will explicitly list: point cloud sizes and datasets (ModelNet40, ShapeNet with 1024-4096 points), PCN architectures and layer counts (PointNet, PointNet++, DGCNN), baseline accelerator configurations (e.g., prior FPGA designs from cited works), and error bars with standard deviation from 5-10 runs per configuration to demonstrate measurement variance and consistency. revision: yes
Circularity Check
No circularity: claims rest on proposed algorithms and direct FPGA measurements
full rationale
The paper introduces Octree-based Islandization and Hub-based Scheduling as algorithmic techniques to exploit spatial locality in the DS step of PCNs. The reported theoretical reductions (55.2%-93.8% fetching, 45.4%-80.6% computation) and measured speedups (1.2x-3.2x) are presented as outcomes of evaluation on FPGA prototypes with the Islandization Unit as a plug-in. No equations, fitted parameters, or self-citations are shown that reduce the central claims to tautological inputs by construction. The derivation chain is self-contained against external benchmarks (hardware implementation and workload measurements), with no load-bearing self-referential steps.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Point subsets gathered during PCN data structuring exhibit substantial spatial locality due to overlapping points.
invented entities (1)
-
Islandization Unit
no independent evidence
Forward citations
Cited by 1 Pith paper
-
FlashFPS: Efficient Farthest Point Sampling for Large-Scale Point Clouds via Pruning and Caching
FlashFPS accelerates FPS via candidate/iteration pruning and inter-layer caching, delivering 5.16x GPU speedup and 2.69x on accelerators with negligible accuracy loss.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.