Semantic-based Internet of Embodied Intelligence: Visions and Frontiers
Pith reviewed 2026-07-02 00:39 UTC · model grok-4.3
The pith
Semantic information serves as a unified metric integrating perception, intelligence, control, and communication for networks of embodied agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that semantic information leveraged as a unified metric throughout the agent lifecycle revolutionizes environmental perception, cognition and task planning, action generation and robust control, and communication and networking, with a case study verifying significant improvements in channel robustness and reduced end-to-end latency for EI.
What carries the argument
The SIoEI paradigm, which applies semantic information as a unified metric across the four dimensions of perception, intelligence, control, and communication.
If this is right
- Semantic processing enhances environmental perception for embodied agents.
- Cognition and task planning align more closely with physical constraints.
- Action generation and control gain robustness against uncertainties.
- Communication and networking achieve lower latency and higher robustness.
Where Pith is reading between the lines
- Multi-agent embodied systems could scale with far lower bandwidth demands if meanings replace raw sensor streams.
- The unified metric may reduce mismatches between AI planning outputs and real-world actuator limits.
- Standard ways to extract and share semantics across heterogeneous agents would need development for broad adoption.
Load-bearing premise
Semantic information can be reliably extracted, represented, and applied as a single metric across perception, intelligence, control, and communication without losing critical physical details or introducing new errors in embodied agents.
What would settle it
A direct comparison experiment on multi-agent embodied systems showing that semantic processing fails to improve or worsens channel robustness and end-to-end latency relative to non-semantic baselines.
Figures
read the original abstract
Recent advances in generative artificial intelligence (AI) and embodied intelligence (EI) enable autonomous agents to interact with the physical world. However, scaling these systems into networks of multiple agents, namely the Internet of EI (IoEI), faces critical bottlenecks. These include the overhead of massive multimodal data transmission and the decoupling of logical reasoning from physical constraints. To address these challenges, we envision the Semantic-based IoEI (SIoEI), which leverages semantic information as a unified metric throughout the agent lifecycle. We systematically define four key dimensions of EI: perception, intelligence, control, and communication. We further elaborate how semantic empowerment revolutionizes environmental perception, cognition and task planning, action generation and robust control, and communication and networking. We also present a case study to verify that, the semantic-empowered end-to-end process significantly improves channel robustness and reduces end-to-end latency for EI. Finally, we outline critical open research directions for the SIoEI paradigm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
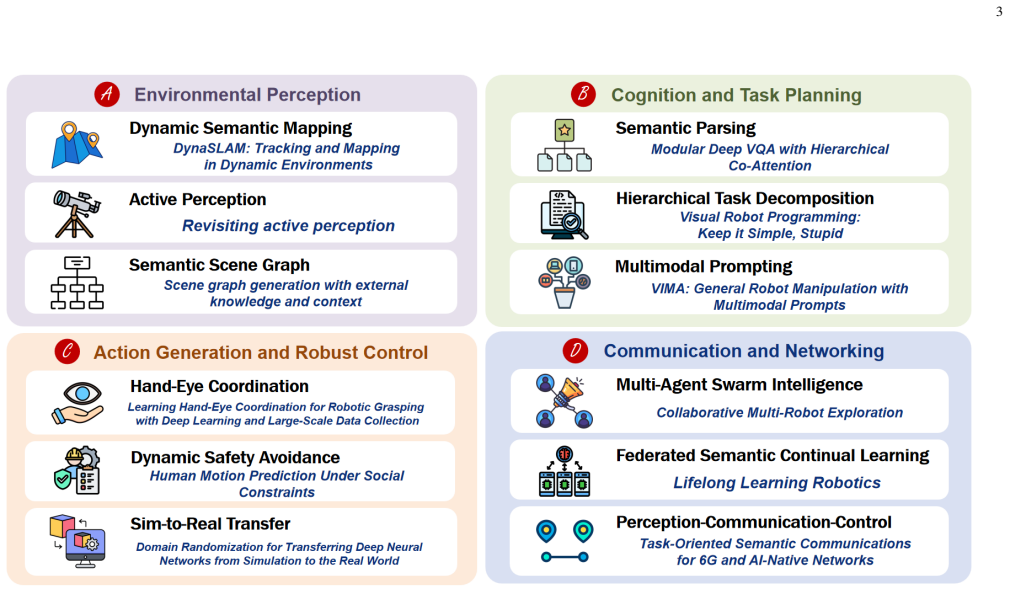
Summary. The manuscript envisions the Semantic-based Internet of Embodied Intelligence (SIoEI) paradigm, which leverages semantic information as a unified metric across the agent lifecycle to overcome bottlenecks in scaling embodied intelligence (EI) systems, such as massive multimodal data transmission and decoupling of reasoning from physical constraints. It systematically defines four EI dimensions (perception, intelligence, control, communication), elaborates semantic empowerment in environmental perception, cognition/task planning, action generation/robust control, and communication/networking, presents a case study verifying improvements in channel robustness and end-to-end latency, and outlines open research directions.
Significance. If the vision holds, SIoEI could provide a unifying framework for semantic integration in multi-agent EI systems, directing research toward more efficient perception-to-action pipelines. The manuscript's strength lies in its structured definition of the four dimensions and explicit outline of critical open research directions, which offers a clear roadmap without relying on fitted parameters or self-referential definitions.
major comments (1)
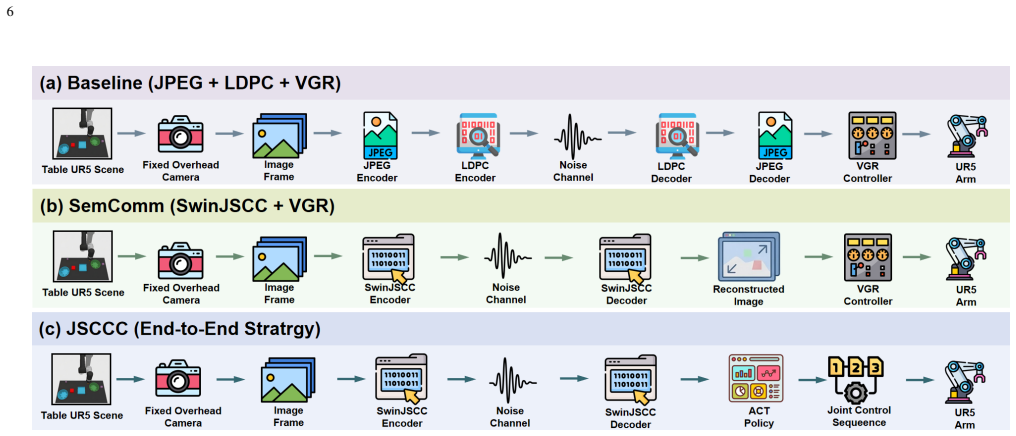
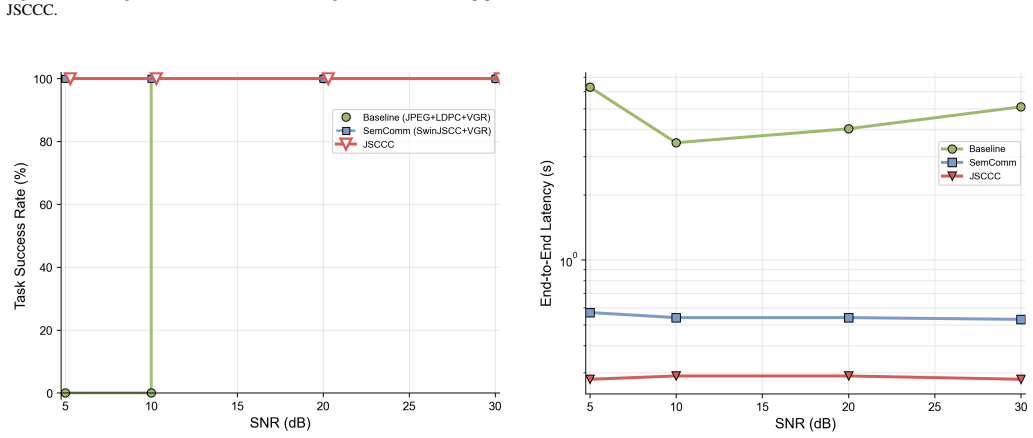
- [Case Study] Case study section: the claim that the semantic-empowered end-to-end process 'significantly improves channel robustness and reduces end-to-end latency' is presented without any description of the experimental setup, metrics used, quantitative results, baselines, or error analysis. This detail is load-bearing for the central claim that semantics yield verifiable gains.
minor comments (1)
- The transition between the four EI dimensions and the semantic empowerment subsections could include explicit cross-references to avoid repetition in how semantics address physical constraints.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the manuscript's structured definition of the four EI dimensions along with its outline of open research directions. We address the single major comment below.
read point-by-point responses
-
Referee: [Case Study] Case study section: the claim that the semantic-empowered end-to-end process 'significantly improves channel robustness and reduces end-to-end latency' is presented without any description of the experimental setup, metrics used, quantitative results, baselines, or error analysis. This detail is load-bearing for the central claim that semantics yield verifiable gains.
Authors: We agree that the case study, as currently presented, does not supply the necessary experimental details to support the stated performance claims. In the revised manuscript we will expand the case study section to include: (i) a complete description of the simulation/experimental setup (network topology, channel models, agent configurations), (ii) the precise metrics employed (e.g., packet error rate or semantic similarity for robustness; end-to-end latency in milliseconds), (iii) quantitative results with numerical values, (iv) explicit baselines (traditional bit-level transmission and non-semantic EI pipelines), and (v) an error analysis or statistical significance assessment. These additions will make the verification reproducible and will directly address the load-bearing nature of the claim. revision: yes
Circularity Check
No significant circularity
full rationale
The paper is a vision and frontiers piece that defines four EI dimensions (perception, intelligence, control, communication) and conceptually elaborates prospective benefits of semantic information as a unifying metric. No equations, derivations, fitted parameters, or technical protocols are present in the provided text. The case study is invoked only at a high level to support robustness and latency claims without any reduction to self-referential inputs or self-citation chains. The central framing remains independent of any internal construction that would force the claimed outcomes.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Semantic information can serve as a unified metric across perception, intelligence, control, and communication without loss of critical physical constraints
invented entities (1)
-
Semantic-based IoEI (SIoEI)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
A survey of embodied ai: From simulators to research tasks,
J. Duan, S. Yu, H. L. Tan, H. Zhu, and C. Tan, “A survey of embodied ai: From simulators to research tasks,”IEEE Transactions on Emerging Topics in Computational Intelligence, vol. 6, no. 2, pp. 230–244, 2022
2022
-
[2]
Semantics-empowered communication for networked intelligent systems,
M. Kountouris and N. Pappas, “Semantics-empowered communication for networked intelligent systems,”IEEE Communications Magazine, vol. 59, no. 6, pp. 96–102, 2021
2021
-
[3]
Semantic radio access networks: Architecture, state-of-the-art, and future directions,
R. Meng, Z. Huang, J. Yan, M. Sun, Y . Liu, C. Feng, X. Xu, Z. Zhang, S. Gao, P. Zhanget al., “Semantic radio access networks: Architecture, state-of-the-art, and future directions,”IEEE Transactions on Cognitive Communications and Networking, vol. 12, pp. 7076–7097, 2026
2026
-
[4]
Towards semantic-based agent communication networks: Vision, technologies, and challenges,
P. Zhang, R. Meng, X. Xu, Y . Wang, Z. Huang, Y . Liu, R. Zhang, Y . Liu, H. Tong, H. Songet al., “Towards semantic-based agent communication networks: Vision, technologies, and challenges,”arXiv preprint arXiv:2603.24328, 2026
-
[5]
Deep learning enabled semantic communication systems,
H. Xie, Z. Qin, G. Y . Li, and B.-H. Juang, “Deep learning enabled semantic communication systems,”IEEE transactions on signal pro- cessing, vol. 69, pp. 2663–2675, 2021
2021
-
[6]
Learning transferable visual models from natural language supervision,
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clarket al., “Learning transferable visual models from natural language supervision,” inProceedings of the 38th International Conference on Machine Learning (ICML), 2021, pp. 8748–8763
2021
-
[7]
Generative diffusion models for wireless networks: Fundamental, architecture, and state-of-the-art,
D. Fan, R. Meng, X. Xu, Y . Liu, G. Nan, C. Feng, S. Han, S. Gao, B. Xu, D. Niyatoet al., “Generative diffusion models for wireless networks: Fundamental, architecture, and state-of-the-art,”IEEE Communications Surveys & Tutorials, vol. 28, pp. 5632–5677, 2026
2026
-
[8]
Do as i can, not as i say: Grounding language in robotic affordances,
M. Ahn, A. Brohan, N. Brown, Y . Chebotar, O. Cortes, B. David, C. Finn, C. Fu, K. Gopalakrishnan, K. Hausmanet al., “Do as i can, not as i say: Grounding language in robotic affordances,” inProceedings of the 11th International Conference on Learning Representations (ICLR), 2023
2023
-
[9]
Deep joint source- channel coding for wireless image transmission,
E. Bourtsoulatze, D. B. Kurka, and D. G ¨und¨uz, “Deep joint source- channel coding for wireless image transmission,”IEEE Transactions on Cognitive Communications and Networking, vol. 5, no. 3, pp. 567–579, 2019
2019
-
[10]
Nonlinear transform source-channel coding for semantic communications,
J. Dai, S. Wang, K. Tan, Z. Si, X. Liu, K. Li, and Z. Ping, “Nonlinear transform source-channel coding for semantic communications,”IEEE Journal on Selected Areas in Communications, vol. 40, no. 8, pp. 2300– 2316, Aug. 2022
2022
-
[11]
Kimera: From SLAM to spatial perception with 3D dynamic scene graphs,
A. Rosinol, M. Abate, Y . Chang, and L. Carlone, “Kimera: From SLAM to spatial perception with 3D dynamic scene graphs,”The International Journal of Robotics Research, vol. 40, no. 12–14, pp. 1510–1546, 2021
2021
-
[12]
Open-vocabulary object detection via vision and language knowledge distillation,
X. Gu, T.-Y . Lin, W. Kuo, and Y . Cui, “Open-vocabulary object detection via vision and language knowledge distillation,” inProceedings of the 10th International Conference on Learning Representations (ICLR), 2022
2022
-
[13]
PaLM-E: An embodied multimodal language model,
D. Driess, F. Xia, M. S. M. Sajjadi, C. Lynch, A. Chowdhery, B. Ichter, A. Wahid, J. Tompson, Q. Vuong, T. Yuet al., “PaLM-E: An embodied multimodal language model,” inProceedings of the 40th International Conference on Machine Learning (ICML), 2023, pp. 8469–8488
2023
-
[14]
Toward edge general intelligence with agentic ai and agentification: Concepts, technologies, and future directions,
R. Zhang, G. Liu, Y . Liu, C. Zhao, J. Wang, Y . Xu, D. Niyato, J. Kang, Y . Li, S. Maoet al., “Toward edge general intelligence with agentic ai and agentification: Concepts, technologies, and future directions,”IEEE Communications Surveys & Tutorials, vol. 28, pp. 4285–4318, 2026
2026
-
[15]
Enhanced ground–satellite direct access via onboard rydberg atomic quantum receivers,
Q. Peng, T. Gong, Z. Song, Q. Luo, Z. Lin, P. Xiao, and C. Yuen, “Enhanced ground–satellite direct access via onboard rydberg atomic quantum receivers,”IEEE Wireless Communications, vol. 33, no. 3, pp. 23–30, 2026
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.