Stability Analysis of Pantograph Delay Differential Equations
Pith reviewed 2026-05-22 03:22 UTC · model grok-4.3
The pith
Analytic criteria partition the parameter plane of pantograph delay differential equations into regions of instability, asymptotic stability, and delay-dependent stability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
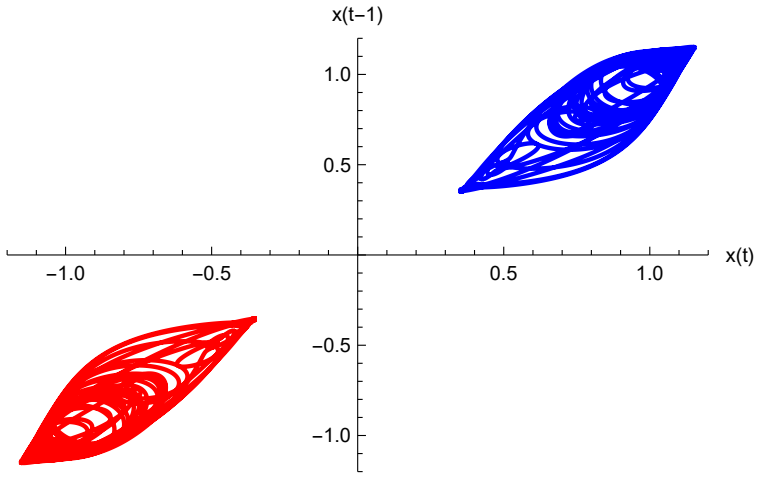
The authors establish analytic criteria that partition the parameter plane into unstable, asymptotically stable, and delay-dependent stability regions for pantograph delay differential equations. These criteria are supported by numerical simulations that illustrate the sharpness of the stability boundaries. A proportional-delay analogue of the Mackey-Glass chaotic delay differential equation is also formulated and its dynamical behaviour examined.
What carries the argument
The analytic stability criteria that partition the parameter plane according to the proportionality constant and other system parameters.
If this is right
- The parameter plane can be divided explicitly into regions of different stability types.
- Numerical simulations confirm that the predicted stability boundaries are sharp.
- A proportional-delay version of the Mackey-Glass equation can be constructed and its dynamics studied directly.
Where Pith is reading between the lines
- The same partitioning technique might extend to other functional equations that contain proportional delays.
- Designers of systems with time-scaled delays could use the regions to choose parameters that guarantee desired long-term behavior.
Load-bearing premise
The criteria presuppose that the pantograph equation has a linear or mildly nonlinear form with the proportionality constant q fixed within specific bounds.
What would settle it
A numerical simulation of a solution that grows when the criteria claim asymptotic stability, or remains bounded when instability is predicted.
Figures




read the original abstract
This article investigates the stability of pantograph delay differential equations, in which the delayed argument is proportional to the present time. We derive analytic criteria that partition the parameter plane into unstable, asymptotically stable, and delay-dependent stability regions. The theoretical results are supported by numerical simulations that illustrate the sharpness of the stability boundaries. We also formulate a proportional-delay analogue of the Mackey--Glass chaotic delay differential equation and examine the resulting dynamical behaviour.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript analyzes the stability of the linear pantograph delay differential equation y'(t) = a y(t) + b y(q t) for 0 < q < 1. Analytic criteria are derived from the associated characteristic equation to partition the (a, b) parameter plane into unstable, asymptotically stable, and delay-dependent stability regions. These results are illustrated via numerical simulations that demonstrate boundary sharpness, and the paper also introduces a proportional-delay analogue of the Mackey-Glass equation to examine its dynamical behavior.
Significance. If the derivations hold, the work provides a useful analytic framework for stability in a class of delay equations with proportional delays, which appear in applications such as population models and control theory. The explicit partitioning of the parameter plane via the characteristic equation is a clear strength, as is the decision to use numerics only for illustration rather than to establish the criteria. The Mackey-Glass extension broadens the scope to nonlinear chaotic dynamics.
major comments (1)
- [§3, Eq. (8)] §3, Eq. (8): the transition from the characteristic equation to the explicit boundaries separating the three stability regions in the (a, b) plane is stated without intermediate steps showing how the roots cross the imaginary axis for fixed q; this step is load-bearing for the central partitioning claim and requires expansion to confirm the regions are obtained directly from the equation structure.
minor comments (2)
- [Abstract and §2] The definition of 'delay-dependent stability' is used in the abstract and §2 but is not restated explicitly before the numerical illustrations; a one-sentence reminder would improve readability.
- [Figure 3] Figure 3 (Mackey-Glass analogue): the phase portraits lack axis labels and a clear indication of the value of q used; this reduces the clarity of the dynamical behavior claim.
Simulated Author's Rebuttal
We thank the referee for the constructive comment and for recognizing the potential utility of the analytic stability framework for pantograph equations. We address the single major comment below and will incorporate the requested expansion in the revised manuscript.
read point-by-point responses
-
Referee: [§3, Eq. (8)] §3, Eq. (8): the transition from the characteristic equation to the explicit boundaries separating the three stability regions in the (a, b) plane is stated without intermediate steps showing how the roots cross the imaginary axis for fixed q; this step is load-bearing for the central partitioning claim and requires expansion to confirm the regions are obtained directly from the equation structure.
Authors: We agree that additional intermediate steps would make the derivation of the stability boundaries more transparent. In the revised manuscript we will expand the text immediately following Equation (8) to include the explicit calculation: for fixed q we substitute s = iω (ω real) into the characteristic equation, equate real and imaginary parts to zero, and solve the resulting algebraic system for the critical curves a = a(ω,q) and b = b(ω,q) that bound the three regions. These curves are then shown to correspond to the loci where a pair of complex roots crosses the imaginary axis, thereby rigorously justifying the partitioning of the (a,b) plane into asymptotically stable, unstable, and delay-dependent stability domains. revision: yes
Circularity Check
No significant circularity
full rationale
The derivation begins from the explicitly stated linear pantograph equation y'(t) = a y(t) + b y(q t) with 0 < q < 1, forms the associated characteristic equation, and obtains analytic conditions on the (a, b) plane that delineate the stability regions. This is a direct, standard application of the characteristic-equation method to the given functional form; the resulting partitioning criteria are not obtained by fitting parameters to data, by renaming prior results, or by any self-citation chain that reduces the central claim to its own inputs. Numerical simulations are described solely as illustrations of boundary sharpness and do not enter the derivation of the criteria themselves. The analysis is therefore self-contained against external benchmarks and exhibits no load-bearing circular steps.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We derive analytic criteria that partition the parameter plane into unstable, asymptotically stable, and delay-dependent stability regions... using the series solution (1.2), Lyapunov–Krasovskii theory, and Lyapunov–Chetaev theory.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 2.3. The system (1.1) is asymptotically stable if a<0, a<b<−a and b²/a² < q <1.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Series solution of the pantograph equation and its properties.Fractal and Fractional, 1(1):16, 2017
Sachin Bhalekar and Jayvant Patade. Series solution of the pantograph equation and its properties.Fractal and Fractional, 1(1):16, 2017
work page 2017
-
[2]
Oxford University Press, Oxford, 2003
Alfredo Bellen and Marino Zennaro.Numerical Methods for Delay Differential Equations. Oxford University Press, Oxford, 2003
work page 2003
-
[3]
On a special functional equation.Journal of the London Mathematical Society, 15(2):115–123, 1940
Kurt Mahler. On a special functional equation.Journal of the London Mathematical Society, 15(2):115–123, 1940
work page 1940
- [4]
-
[5]
University of California Press
-
[6]
Yu Zhang and Longsuo Li. Stability of numerical method for semi-linear stochastic pantograph differential equations.Journal of Inequalities and Applications, 2016(30), 2016
work page 2016
-
[7]
M. Dehghan and F. Shakeri. The use of the decomposition procedure of Adomian for solving a delay differential equation arising in electrodynamics.Physica Scripta, 78(6):065004, 2008
work page 2008
-
[8]
A. J. Hall and G. C. Wake. A functional differential equation arising in the modelling of cell growth.Journal of the Australian Mathematical Society. Series B. Applied Mathematics, 30(4):424–435, 1989. 15
work page 1989
-
[9]
V. A. Ambartsumyan. On the fluctuation of the brightness of the Milky Way.Doklady Akademii Nauk SSSR, 44:223–226, 1944
work page 1944
-
[10]
J. R. Ockendon and A. B. Tayler. The dynamics of a current collection system for an electric locomotive.Proceedings of the Royal Society of London. Series A, Mathematical and Physical Sciences, 322(1551):447–468, 1971
work page 1971
-
[11]
Tosio Kato and J. B. McLeod. The functional-differential equationy′(x) = ay(λx) +by(x). Bulletin of the American Mathematical Society, 77(6):891–935, 1971
work page 1971
-
[12]
Arieh Iserles. On the generalized pantograph functional-differential equation.European Journal of Applied Mathematics, 4(1):1–38, 1993
work page 1993
-
[13]
C. T. H. Baker, C. A. H. Paul, and D. R. Willé. Issues in the numerical solution of evolutionary delay differential equations.Advances in Computational Mathematics, 3(3):171–196, 1995
work page 1995
-
[14]
Arieh Iserles and Yunkang Liu. On pantograph integro-differential equations.Journal of Integral Equations and Applications, 6(2):213–237, 1994
work page 1994
-
[15]
Sachin Bhalekar. Pantograph. https://github.com/sachinbhalekaruoh/pantograph, 2026. GitHub repository
work page 2026
-
[16]
Stability of motion.Stanford University Press, 1963
Nicolai Nikolaevich Krasovskii. Stability of motion.Stanford University Press, 1963
work page 1963
-
[17]
N. G. Chetaev.The Stability of Motion. Pergamon Press, New York, 1961. Translated from the Russian
work page 1961
-
[18]
Anthony N Michel, Ling Hou, and Derong Liu.Stability of dynamical systems. Springer, 2008
work page 2008
-
[19]
Oscillation and chaos in physiological control systems
Michael C Mackey and Leon Glass. Oscillation and chaos in physiological control systems. Science, 197(4300):287–289, 1977
work page 1977
-
[20]
Mackey-glass equation.Scholarpedia, 5(3):6908, 2010
Leon Glass and Michael Mackey. Mackey-glass equation.Scholarpedia, 5(3):6908, 2010. 16
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.