Ultra-Fusion: A Resilient Tightly-Coupled Multi-Sensor Fusion SLAM Framework under Sensor Degradation and Spatiotemporal Perturbation for Intelligent Transportation Systems
Pith reviewed 2026-06-26 14:09 UTC · model grok-4.3
The pith
Ultra-Fusion maintains accurate multi-sensor localization by turning asynchronous measurements into optional factors inside one sliding-window estimator while gating degraded data and refining calibration on the fly.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
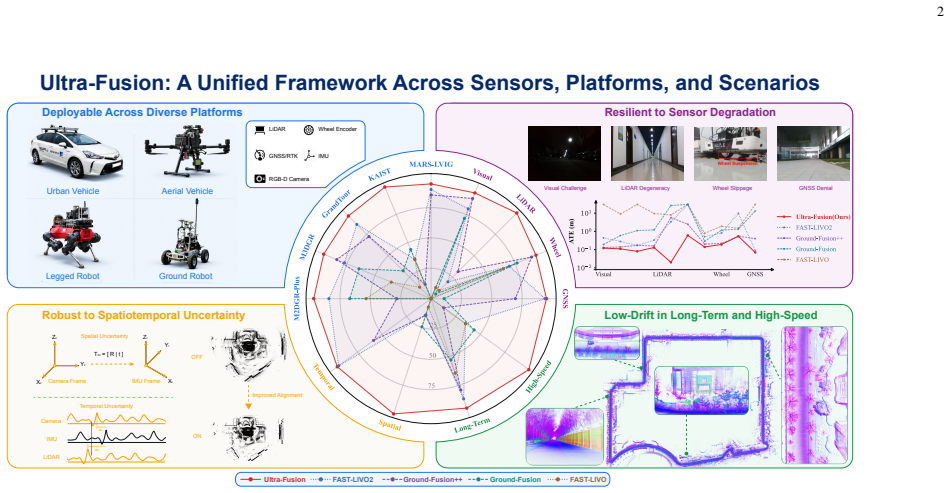
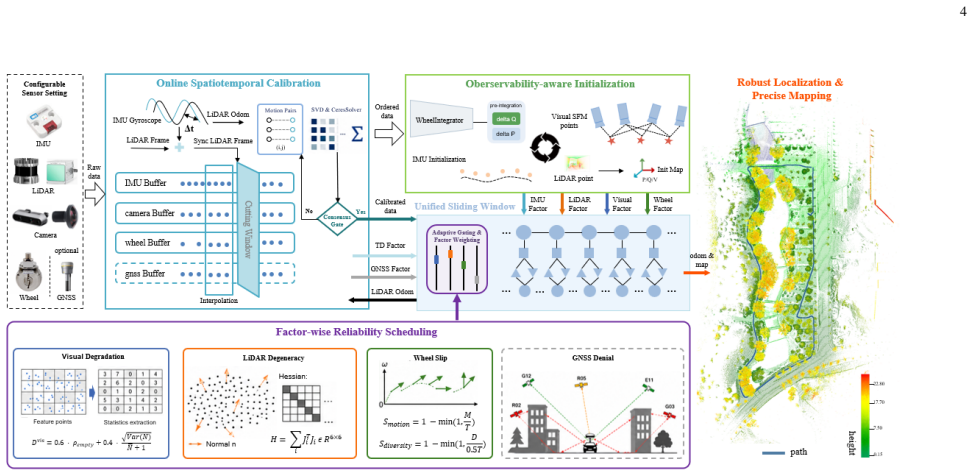
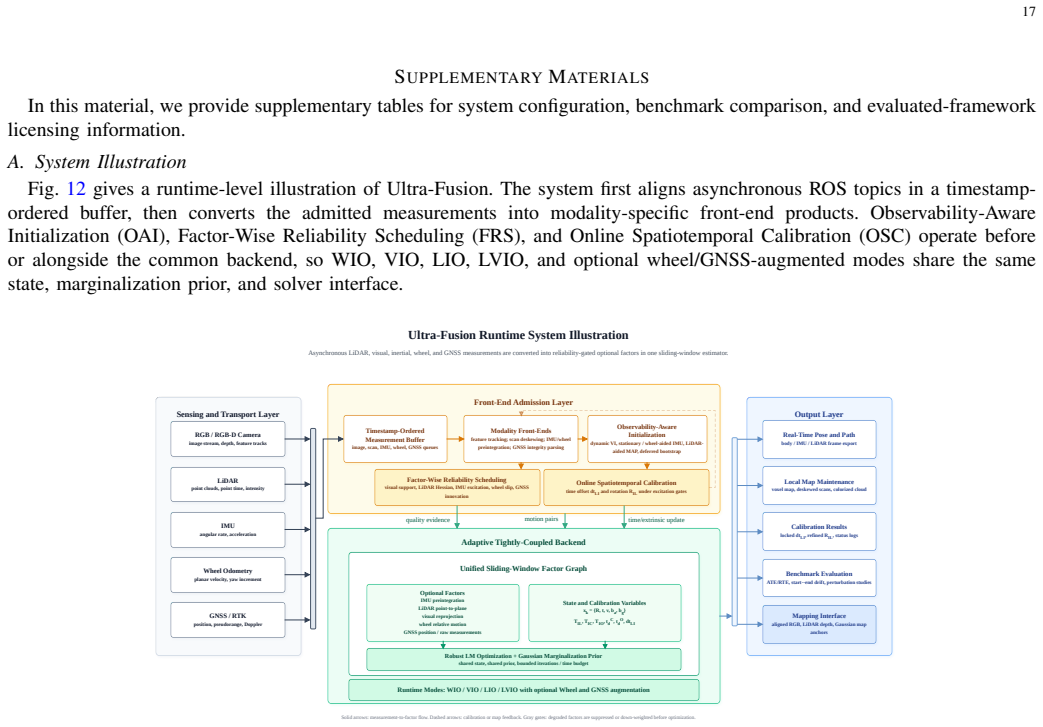
Ultra-Fusion is a unified sliding-window estimator that accepts asynchronous WIO, VIO, LIO, and LVIO measurements (with optional wheel and GNSS augmentation) by converting them into optional factors, selects the bootstrap mode via observability analysis, gates degraded measurements through factor-wise reliability scheduling, and simultaneously refines temporal offsets and rotational extrinsics between LiDAR and IMU, thereby delivering competitive accuracy across wheeled, legged, and aerial platforms when sensors degrade or calibration drifts.
What carries the argument
The unified sliding-window estimator that converts timestamp-ordered asynchronous measurements into optional factors, combined with factor-wise reliability scheduling to exclude degraded data and online LiDAR-IMU spatiotemporal calibration to refine offsets and extrinsics during operation.
If this is right
- Localization availability continues through GNSS outage in tunnels and urban canyons.
- The same estimator supports road-level autonomy, campus and warehouse mobility, and low-altitude aerial inspection without separate code paths.
- Accuracy remains competitive during long-duration and high-speed operation on wheeled, legged, and aerial platforms.
- Optional wheel and GNSS factors can be added or removed at runtime while the core fusion stays stable.
Where Pith is reading between the lines
- The scheduling and calibration modules could be extracted and reused inside other sliding-window or factor-graph SLAM pipelines.
- The framework may reduce the engineering cost of deploying the same localization stack on vehicles with different sensor suites.
- Testing simultaneous degradation of two or more sensors would reveal whether the reliability scheduler remains stable when multiple factors are down-weighted at once.
- The online calibration could shorten the time between hardware changes and operational use by removing the need for repeated offline extrinsic calibration.
Load-bearing premise
That factor-wise reliability scheduling and online LiDAR-IMU calibration will correctly identify and mitigate degraded measurements and calibration errors without introducing instability or requiring platform-specific tuning.
What would settle it
A recorded trajectory in which a sensor degrades in a way that the reliability scheduler includes bad factors, producing large drift or estimator divergence, or in which the online calibration converges to incorrect offsets that degrade rather than improve accuracy.
Figures
read the original abstract
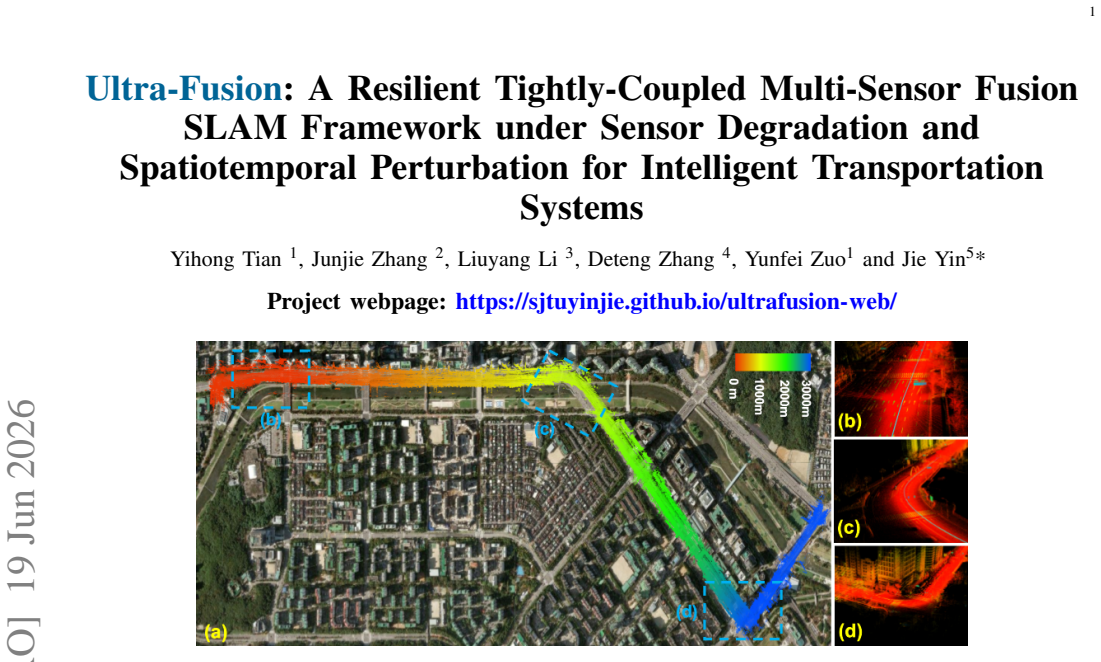
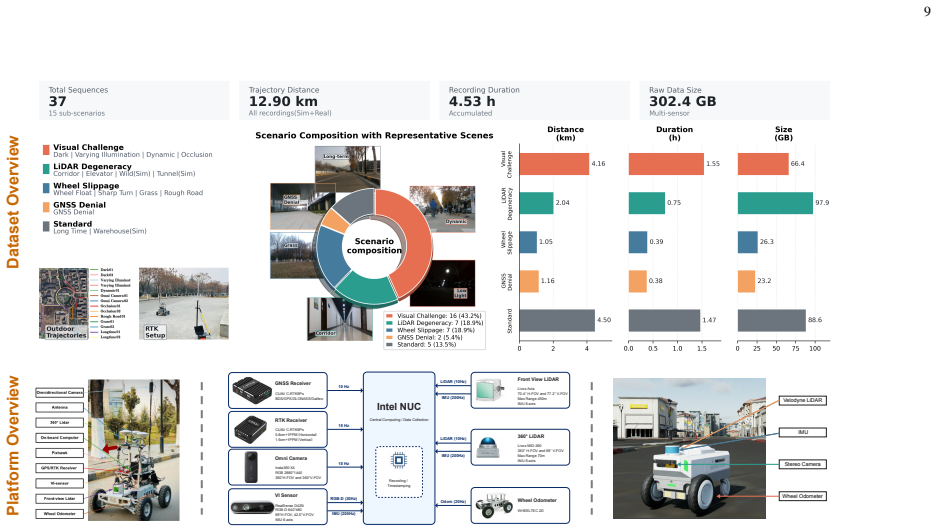
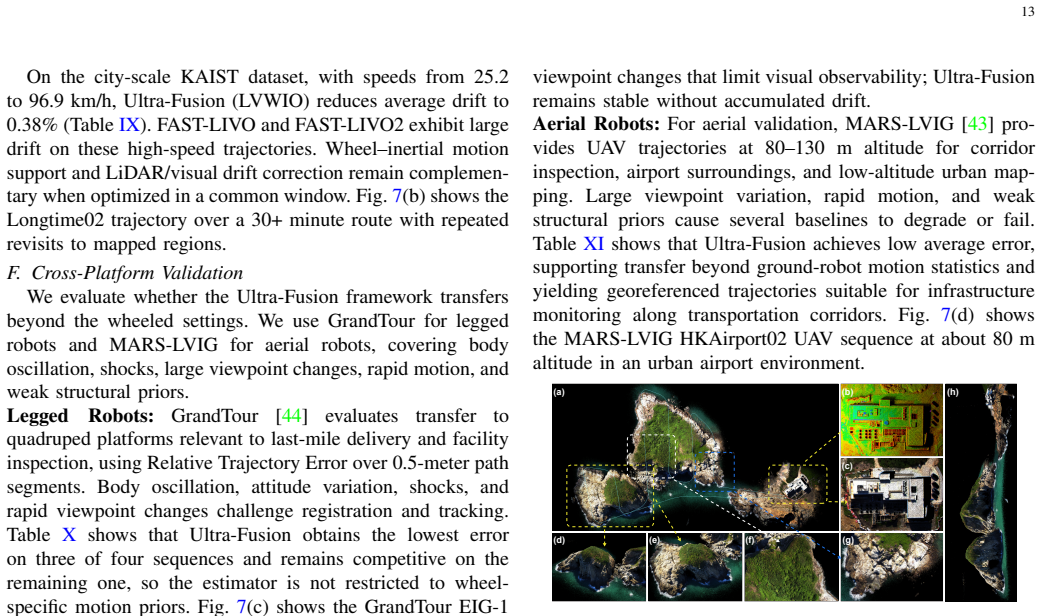
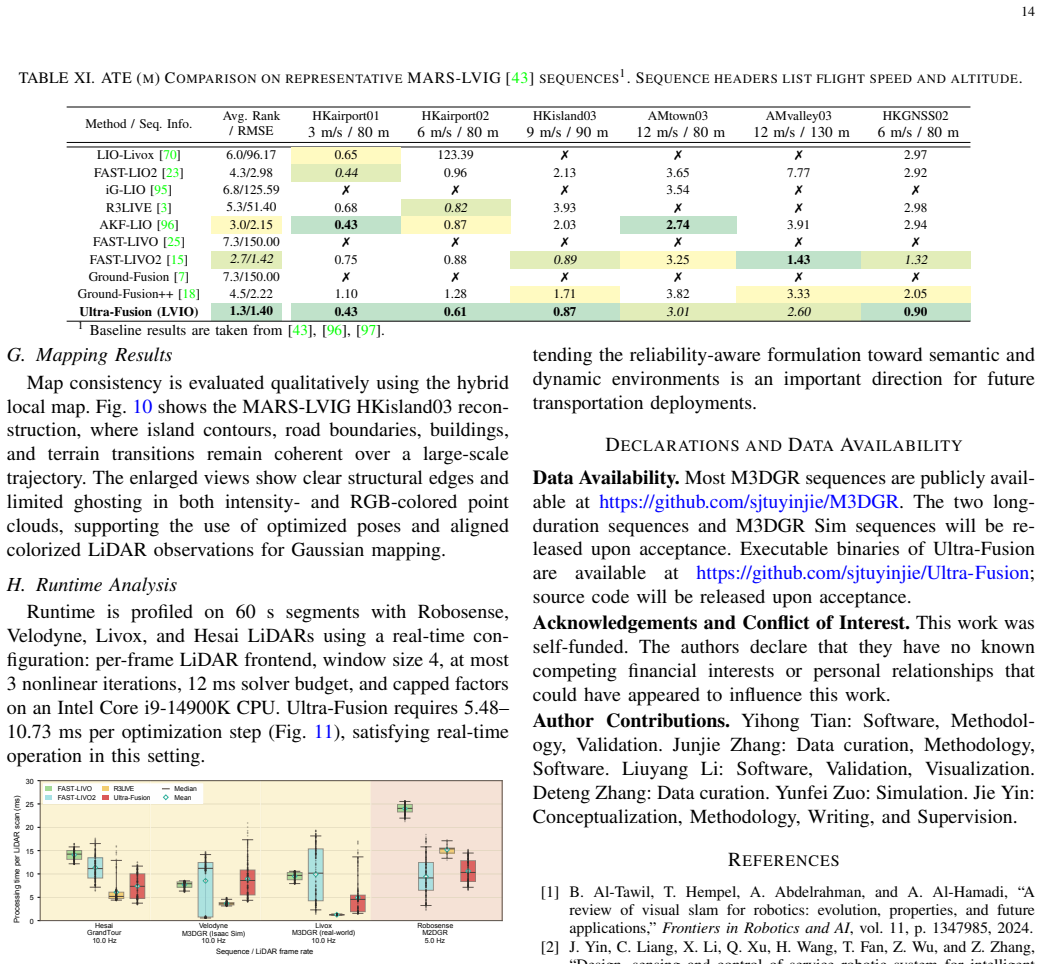
Reliable localization is essential for intelligent transportation systems (ITS), including autonomous vehicles, quadruped last-mile carriers, and infrastructure-inspection unmanned aerial vehicles (UAVs). Although tightly-coupled multi-sensor fusion improves accuracy in favorable conditions, deployed systems remain vulnerable to sensor degradation -- poor illumination, LiDAR degeneracy, wheel slippage, and GNSS outage -- and to spatiotemporal calibration errors. These failures are common in urban canyons, tunnels, and high-speed corridors, where localization drift can degrade route tracking, tunnel passage continuity, and local map alignment. This paper presents Ultra-Fusion, a tightly-coupled multi-sensor localization framework based on a unified sliding-window estimator. Asynchronous measurements are timestamp-ordered and converted into optional factors within one optimization window, supporting WIO, VIO, LIO, and LVIO with optional wheel and GNSS augmentation. Observability-aware initialization selects the bootstrap mode, factor-wise reliability scheduling gates degraded measurements, and online LiDAR--IMU spatiotemporal calibration refines temporal offsets and rotational extrinsics during operation. We extend the M3DGR benchmark with simulation trajectories and evaluate more than 60 open-source SLAM systems on M3DGR, M2DGR-Plus, KAIST, GrandTour, and MARS-LVIG. The results show competitive accuracy across wheeled, legged, and aerial platforms under long-duration and high-speed operation, degradation, and calibration perturbation, improving localization availability for road-level autonomy, campus and warehouse mobility, and low-altitude aerial inspection. To benefit the industrial and academic community, we will release source code and datasets upon paper acceptance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Ultra-Fusion, a tightly-coupled multi-sensor fusion SLAM framework for intelligent transportation systems. It employs a unified sliding-window estimator that converts asynchronous measurements from WIO, VIO, LIO, and LVIO (with optional wheel/GNSS) into timestamp-ordered optional factors. Key components include observability-aware initialization, factor-wise reliability scheduling to gate degraded measurements (e.g., poor illumination, LiDAR degeneracy, slippage, GNSS outage), and online LiDAR-IMU spatiotemporal calibration for temporal offsets and rotational extrinsics. The work extends the M3DGR benchmark, evaluates over 60 open-source SLAM systems on M3DGR, M2DGR-Plus, KAIST, GrandTour, and MARS-LVIG, and claims competitive accuracy across wheeled, legged, and aerial platforms under long-duration, high-speed, degradation, and calibration-perturbation conditions.
Significance. If the reliability scheduling and online calibration mechanisms can be shown to maintain estimator stability without platform-specific tuning or oscillation under simultaneous multi-sensor degradation, the framework could meaningfully improve localization availability for road-level autonomy, campus/warehouse mobility, and low-altitude inspection in environments where existing systems fail (urban canyons, tunnels, high-speed corridors). The broad multi-platform evaluation and planned code/dataset release would add practical value.
major comments (2)
- [Abstract / unified sliding-window estimator description] The central claim that factor-wise reliability scheduling and online LiDAR-IMU calibration correctly gate degraded measurements and refine extrinsics without introducing instability rests on mechanisms whose explicit formulation, threshold definitions, and stability properties are not provided. No equations, residual-threshold rules, or Lyapunov-style bounds appear for the scheduling logic, leaving open the risk of oscillation or erroneous factor rejection (e.g., during partial LiDAR degeneracy in high-speed turns) when multiple sensors degrade simultaneously.
- [Abstract / evaluation paragraph] The abstract asserts 'competitive accuracy' and 'improving localization availability' across >60 systems and multiple benchmarks, yet supplies no quantitative metrics, error bars, ablation results, or specific baseline comparisons. Without these data the load-bearing experimental claim cannot be evaluated.
minor comments (2)
- [Abstract] The list of supported modalities (WIO, VIO, LIO, LVIO) and the phrase 'timestamp-ordered optional factors' would benefit from a short table or diagram clarifying which sensor combinations map to which factor types.
- [Abstract] The claim that the framework supports 'optional wheel and GNSS augmentation' should specify whether these are treated as additional factors inside the same window or as separate modules.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate the planned revisions.
read point-by-point responses
-
Referee: [Abstract / unified sliding-window estimator description] The central claim that factor-wise reliability scheduling and online LiDAR-IMU calibration correctly gate degraded measurements and refine extrinsics without introducing instability rests on mechanisms whose explicit formulation, threshold definitions, and stability properties are not provided. No equations, residual-threshold rules, or Lyapunov-style bounds appear for the scheduling logic, leaving open the risk of oscillation or erroneous factor rejection (e.g., during partial LiDAR degeneracy in high-speed turns) when multiple sensors degrade simultaneously.
Authors: The manuscript body (Sections III-V) contains the factor-graph formulation, residual-based reliability scheduling with explicit threshold rules derived from sensor noise models, and the online spatiotemporal calibration optimization. However, the abstract omits these details, and the stability analysis under simultaneous multi-sensor degradation is not explicitly bounded. We will add the scheduling equations, threshold definitions, and a new stability subsection with supporting analysis and experiments in the revision. revision: yes
-
Referee: [Abstract / evaluation paragraph] The abstract asserts 'competitive accuracy' and 'improving localization availability' across >60 systems and multiple benchmarks, yet supplies no quantitative metrics, error bars, ablation results, or specific baseline comparisons. Without these data the load-bearing experimental claim cannot be evaluated.
Authors: The abstract is intentionally concise; the full quantitative results (RMSE with error bars, ablations on scheduling and calibration, and comparisons to the >60 baselines) appear in Section VI and Tables I-V across all datasets. We will revise the abstract to incorporate key quantitative highlights while preserving length constraints. revision: yes
Circularity Check
No circularity in derivation chain; framework claims rest on empirical evaluation without visible self-referential reductions
full rationale
The abstract and visible text present Ultra-Fusion as a unified sliding-window estimator incorporating observability-aware initialization, factor-wise reliability scheduling, and online LiDAR-IMU calibration, with results from benchmark evaluations across platforms. No equations, parameter fits, or derivation steps are shown that could reduce a claimed prediction or result to its own inputs by construction. No self-citations appear as load-bearing justifications for uniqueness or ansatzes. The central claims are framed as outcomes of testing on M3DGR and other datasets rather than tautological redefinitions, satisfying the default expectation of no significant circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A review of visual slam for robotics: evolution, properties, and future applications,
B. Al-Tawil, T. Hempel, A. Abdelrahman, and A. Al-Hamadi, “A review of visual slam for robotics: evolution, properties, and future applications,”Frontiers in Robotics and AI, vol. 11, p. 1347985, 2024
2024
-
[2]
Design, sensing and control of service robotic system for intelligent navigation and operation in internet data centers,
J. Yin, C. Liang, X. Li, Q. Xu, H. Wang, T. Fan, Z. Wu, and Z. Zhang, “Design, sensing and control of service robotic system for intelligent navigation and operation in internet data centers,” in2023 IEEE 19th In- ternational Conference on Automation Science and Engineering (CASE). IEEE, 2023, pp. 1–8
2023
-
[3]
J. Lin and F. Zhang, “R3live: A robust, real-time, rgb-colored, lidar- inertial-visual tightly-coupled state estimation and mapping package,” arXiv preprint arXiv:2109.07982, 2021
arXiv 2021
-
[4]
Sky-gvins: a sky- segmentation aided gnss-visual-inertial system for robust navigation in urban canyons,
J. Yin, T. Li, H. Yin, W. Yu, and D. Zou, “Sky-gvins: a sky- segmentation aided gnss-visual-inertial system for robust navigation in urban canyons,”Geo-spatial Information Science, vol. 0, no. 0, pp. 1–11, 2023
2023
-
[5]
Implicit event-rgbd neural slam,
D. Qu, C. Yan, D. Wang, J. Yin, Q. Chen, D. Xu, Y . Zhang, B. Zhao, and X. Li, “Implicit event-rgbd neural slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 19 584–19 594
2024
-
[6]
Mimosa: A multi-modal slam framework for resilient autonomy against sensor degradation,
N. Khedekar, M. Kulkarni, and K. Alexis, “Mimosa: A multi-modal slam framework for resilient autonomy against sensor degradation,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 7153–7159
2022
-
[7]
Ground-fusion: A low-cost ground slam system robust to corner cases,
J. Yin, A. Li, W. Xi, W. Yu, and D. Zou, “Ground-fusion: A low-cost ground slam system robust to corner cases,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 8603–8609
2024
-
[8]
Rgbd-inertial trajectory estimation and mapping for ground robots,
Z. Shan, R. Li, and S. Schwertfeger, “Rgbd-inertial trajectory estimation and mapping for ground robots,”Sensors, vol. 19, no. 10, p. 2251, 2019
2019
-
[9]
Dre-slam: Dynamic rgb-d encoder slam for a differential-drive robot,
D. Yang, S. Bi, W. Wang, C. Yuan, X. Qi, and Y . Cai, “Dre-slam: Dynamic rgb-d encoder slam for a differential-drive robot,”Remote Sensing, vol. 11, no. 4, p. 380, 2019. 15
2019
-
[10]
Gr-fusion: Multi- sensor fusion slam for ground robots with high robustness and low drift,
T. Wang, Y . Su, S. Shao, C. Yao, and Z. Wang, “Gr-fusion: Multi- sensor fusion slam for ground robots with high robustness and low drift,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 5440–5447
2021
-
[11]
T. Shan, B. Englot, C. Ratti, and D. Rus, “Lvi-sam: Tightly- coupled lidar-visual-inertial odometry via smoothing and mapping,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE Press, 2021, p. 5692–5698. [Online]. Available: https://doi.org/10.1109/ICRA48506.2021.9561996
-
[12]
Viw-fusion,
T. Zhuang, “Viw-fusion,” https://github.com/TouchDeeper/VIW-Fusion, 2022
2022
-
[13]
Dams-lio: A degeneration-aware and modular sensor-fusion lidar-inertial odome- try,
F. Han, H. Zheng, W. Huang, R. Xiong, Y . Wang, and Y . Jiao, “Dams-lio: A degeneration-aware and modular sensor-fusion lidar-inertial odome- try,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 2745–2751
2023
-
[14]
M2c-gvio: motion manifold constraint aided gnss-visual-inertial odometry for ground ve- hicles,
T. Hua, L. Pei, T. Li, J. Yin, G. Liu, and W. Yu, “M2c-gvio: motion manifold constraint aided gnss-visual-inertial odometry for ground ve- hicles,”Satellite Navigation, vol. 4, no. 1, pp. 1–15, 2023
2023
-
[15]
Fast-livo2: Fast, direct lidar-inertial-visual odometry,
C. Zheng, W. Xu, Z. Zou, T. Hua, C. Yuan, D. He, B. Zhou, Z. Liu, J. Lin, F. Zhu,et al., “Fast-livo2: Fast, direct lidar-inertial-visual odometry,”IEEE Transactions on Robotics, 2024
2024
-
[16]
Ligo: A tightly coupled lidar-inertial-gnss odometry based on a hierarchy fusion framework for global localization with real-time mapping,
D. He, H. Li, and J. Yin, “Ligo: A tightly coupled lidar-inertial-gnss odometry based on a hierarchy fusion framework for global localization with real-time mapping,”IEEE Transactions on Robotics, 2025
2025
-
[17]
Resilient odometry via hierarchical adaptation,
S. Zhao, S. Zhou, Y . Zhang, J. Zhang, C. Wang, W. Wang, and S. Scherer, “Resilient odometry via hierarchical adaptation,”Science Robotics, vol. 10, no. 109, p. eadv1818, 2025. [Online]. Available: https://www.science.org/doi/abs/10.1126/scirobotics.adv1818
-
[18]
Towards robust sensor-fusion ground slam: A comprehensive benchmark and a resilient framework,
D. Zhang, J. Zhang, Y . Sun, T. Li, H. Yin, H. Xie, and J. Yin, “Towards robust sensor-fusion ground slam: A comprehensive benchmark and a resilient framework,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 8894–8901
2025
-
[19]
Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam,
C. Campos, R. Elvira, J. J. G. Rodr ´ıguez, J. M. Montiel, and J. D. Tard´os, “Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam,”IEEE Transactions on Robotics, 2021
2021
-
[20]
Dm-vio: Delayed marginalization visual-inertial odometry,
L. V on Stumberg and D. Cremers, “Dm-vio: Delayed marginalization visual-inertial odometry,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 1408–1415, 2022
2022
-
[21]
Vins-mono: A robust and versatile monocular visual-inertial state estimator,
T. Qin, P. Li, and S. Shen, “Vins-mono: A robust and versatile monocular visual-inertial state estimator,”IEEE Transactions on Robotics, vol. 34, no. 4, pp. 1004–1020, 2018
2018
-
[22]
Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, “Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 5135–5142
2020
-
[23]
Fast-lio2: Fast direct lidar- inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar- inertial odometry,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
2053
-
[24]
Faster-lio: Lightweight tightly coupled lidar-inertial odometry using parallel sparse incremental voxels,
C. Bai, T. Xiao, Y . Chen, H. Wang, F. Zhang, and X. Gao, “Faster-lio: Lightweight tightly coupled lidar-inertial odometry using parallel sparse incremental voxels,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4861–4868, 2022
2022
-
[25]
Fast-livo: Fast and tightly-coupled sparse-direct lidar-inertial-visual odometry,
C. Zheng, Q. Zhu, W. Xu, X. Liu, Q. Guo, and F. Zhang, “Fast-livo: Fast and tightly-coupled sparse-direct lidar-inertial-visual odometry,” in2022 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2022, pp. 4003–4009
2022
-
[26]
Gvins: Tightly coupled gnss–visual–inertial fusion for smooth and consistent state estimation,
S. Cao, X. Lu, and S. Shen, “Gvins: Tightly coupled gnss–visual–inertial fusion for smooth and consistent state estimation,”IEEE Transactions on Robotics, 2022
2022
-
[27]
In-p 3 vio: Tightly-coupled ppp-visual-inertial odometry based on invariant filter approach,
T. Li, T. Hua, J. Yin, X. Yang, W.-A. Zhang, L. Pei, W. Yu, and T.- K. Truong, “In-p 3 vio: Tightly-coupled ppp-visual-inertial odometry based on invariant filter approach,”IEEE Transactions on Aerospace and Electronic Systems, 2026
2026
-
[28]
Loam: Lidar odometry and mapping in real- time
J. Zhang and S. Singh, “Loam: Lidar odometry and mapping in real- time.” inRobotics: Science and Systems, vol. 2, no. 9, 2014
2014
-
[29]
Point-lio: Robust high-bandwidth light detection and ranging inertial odometry,
D. He, W. Xu, N. Chen, F. Kong, C. Yuan, and F. Zhang, “Point-lio: Robust high-bandwidth light detection and ranging inertial odometry,” Advanced Intelligent Systems, vol. 5, no. 7, p. 2200459, 2023
2023
-
[30]
Slict: Multi- input multi-scale surfel-based lidar-inertial continuous-time odometry and mapping,
T.-M. Nguyen, D. Duberg, P. Jensfelt, S. Yuan, and L. Xie, “Slict: Multi- input multi-scale surfel-based lidar-inertial continuous-time odometry and mapping,”IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2102–2109, 2023
2023
-
[31]
Eigen is all you need: Efficient lidar-inertial continuous-time odometry with internal association,
T.-M. Nguyen, X. Xu, T. Jin, Y . Yang, J. Li, S. Yuan, and L. Xie, “Eigen is all you need: Efficient lidar-inertial continuous-time odometry with internal association,”IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 5330–5337, 2024
2024
-
[32]
Coco-lic: continuous-time tightly-coupled lidar-inertial-camera odometry using non-uniform b-spline,
X. Lang, C. Chen, K. Tang, Y . Ma, J. Lv, Y . Liu, and X. Zuo, “Coco-lic: continuous-time tightly-coupled lidar-inertial-camera odometry using non-uniform b-spline,”IEEE Robotics and Automation Letters, 2023
2023
-
[33]
Innovation-based kalman filter fault detection and exclusion method against all-source faults for tightly coupled gnss/ins/vision integration,
H. Jiang, D. Yan, J. Wang, and J. Yin, “Innovation-based kalman filter fault detection and exclusion method against all-source faults for tightly coupled gnss/ins/vision integration,”GPS Solutions, vol. 28, no. 3, pp. 1–17, 2024
2024
-
[34]
Unified temporal and spatial calibration for multi-sensor systems,
P. Furgale, J. Rehder, and R. Siegwart, “Unified temporal and spatial calibration for multi-sensor systems,” in2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2013, pp. 1280–1286
2013
-
[35]
Camodocal: Automatic intrinsic and extrinsic calibration of a rig with multiple generic cameras and odometry,
L. Heng, B. Li, and M. Pollefeys, “Camodocal: Automatic intrinsic and extrinsic calibration of a rig with multiple generic cameras and odometry,” in2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2013, pp. 1793–1800
2013
-
[36]
General, single-shot, target-less, and automatic lidar-camera extrinsic calibration toolbox,
K. Koide, S. Oishi, M. Yokozuka, and A. Banno, “General, single-shot, target-less, and automatic lidar-camera extrinsic calibration toolbox,” 2023
2023
-
[37]
The euroc micro aerial vehicle datasets,
M. Burri, J. Nikolic, P. Gohl, T. Schneider, J. Rehder, S. Omari, M. W. Achtelik, and R. Siegwart, “The euroc micro aerial vehicle datasets,” The International Journal of Robotics Research, vol. 35, no. 10, pp. 1157–1163, 2016
2016
-
[38]
The tum vi benchmark for evaluating visual-inertial odometry,
D. Schubert, T. Goll, N. Demmel, V . Usenko, J. St ¨uckler, and D. Cre- mers, “The tum vi benchmark for evaluating visual-inertial odometry,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018, pp. 1680–1687
2018
-
[39]
Are we ready for service robots? the openloris- scene datasets for lifelong slam,
X. Shi, D. Li, P. Zhao, Q. Tian, Y . Tian, Q. Long, C. Zhu, J. Song, F. Qiao, L. Song,et al., “Are we ready for service robots? the openloris- scene datasets for lifelong slam,” in2020 IEEE international conference on robotics and automation (ICRA). IEEE, 2020, pp. 3139–3145
2020
-
[40]
Ground-challenge: A multi-sensor slam dataset focusing on corner cases for ground robots,
J. Yin, H. Yin, C. Liang, H. Jiang, and Z. Zhang, “Ground-challenge: A multi-sensor slam dataset focusing on corner cases for ground robots,” in2023 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2023, pp. 1–5
2023
-
[41]
M2dgr: A multi-sensor and multi-scenario slam dataset for ground robots,
J. Yin, A. Li, T. Li, W. Yu, and D. Zou, “M2dgr: A multi-sensor and multi-scenario slam dataset for ground robots,”IEEE Robotics and Automation Letters, 2022
2022
-
[42]
Complex urban dataset with multi-level sensors from highly diverse urban environ- ments,
J. Jeong, Y . Cho, Y .-S. Shin, H. Roh, and A. Kim, “Complex urban dataset with multi-level sensors from highly diverse urban environ- ments,”The International Journal of Robotics Research, vol. 38, no. 6, pp. 642–657, 2019
2019
-
[43]
Mars-lvig dataset: A multi-sensor aerial robots slam dataset for lidar-visual-inertial-gnss fusion,
H. Li, Y . Zou, N. Chen, J. Lin, X. Liu, W. Xu, C. Zheng, R. Li, D. He, F. Kong,et al., “Mars-lvig dataset: A multi-sensor aerial robots slam dataset for lidar-visual-inertial-gnss fusion,”The International Journal of Robotics Research, p. 02783649241227968, 2024
2024
-
[44]
Grandtour: A legged robotics dataset in the wild for multi-modal perception and state estimation,
J. Frey, T. Tuna, F. Fu, K. Patterson, T. Xu, M. Fallon, C. Cadena, and M. Hutter, “Grandtour: A legged robotics dataset in the wild for multi-modal perception and state estimation,” 2026, *Equal contribution (Turcan Tuna and Jonas Frey). [Online]. Available: https://arxiv.org/abs/2602.18164
arXiv 2026
-
[45]
A review of multi-sensor fusion slam systems based on 3d lidar,
X. Xu, L. Zhang, J. Yang, C. Cao, W. Wang, Y . Ran, Z. Tan, and M. Luo, “A review of multi-sensor fusion slam systems based on 3d lidar,”Remote Sensing, vol. 14, no. 12, p. 2835, 2022
2022
-
[46]
Ct-icp: Real-time elastic lidar odometry with loop closure,
P. Dellenbach, J.-E. Deschaud, B. Jacquet, and F. Goulette, “Ct-icp: Real-time elastic lidar odometry with loop closure,” in2022 Interna- tional Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 5580–5586
2022
-
[47]
On-manifold preintegration for real-time visual–inertial odometry,
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-manifold preintegration for real-time visual–inertial odometry,”IEEE Transactions on Robotics, vol. 33, no. 1, pp. 1–21, 2016
2016
-
[48]
Visual-inertial odometry tightly coupled with wheel encoder adopting robust initialization and online extrinsic calibration,
J. Liu, W. Gao, and Z. Hu, “Visual-inertial odometry tightly coupled with wheel encoder adopting robust initialization and online extrinsic calibration,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019, pp. 5391–5397
2019
-
[49]
A zupt aided initialization procedure for tightly-coupled lidar inertial odometry based slam system,
L. Gui, C. Zeng, S. Dauchert, J. Luo, and X. Wang, “A zupt aided initialization procedure for tightly-coupled lidar inertial odometry based slam system,”Journal of Intelligent & Robotic Systems, vol. 108, no. 3, p. 40, 2023
2023
-
[50]
Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry,
C. Yuan, W. Xu, X. Liu, X. Hong, and F. Zhang, “Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 8518–8525, 2022
2022
-
[51]
Gaussian-lic2: Lidar-inertial-camera gaussian splatting slam,
X. Lang, J. Lv, K. Tang, L. Li, J. Huang, L. Liu, Y . Liu, and X. Zuo, “Gaussian-lic2: Lidar-inertial-camera gaussian splatting slam,”arXiv preprint arXiv:2507.04004, 2025. [Online]. Available: https://arxiv.org/abs/2507.04004 16
arXiv 2025
-
[52]
Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras,
R. Mur-Artal and J. D. Tard ´os, “Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras,”IEEE transactions on robotics, vol. 33, no. 5, pp. 1255–1262, 2017
2017
-
[53]
Tartanvo: A generalizable learning- based vo,
W. Wang, Y . Hu, and S. Scherer, “Tartanvo: A generalizable learning- based vo,” inConference on Robot Learning. PMLR, 2021, pp. 1761– 1772
2021
-
[54]
MASt3R-SLAM: Real- time dense SLAM with 3D reconstruction priors,
R. Murai, E. Dexheimer, and A. J. Davison, “MASt3R-SLAM: Real- time dense SLAM with 3D reconstruction priors,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025
2025
-
[55]
Vins-gw,
Wallong, “Vins-gw,” https://github.com/Wallong/VINS-GPS-Wheel, 2018
2018
-
[56]
Qin and C
T. Qin and C. Shaozu, “A-loam,” https://github.com/ HKUST-Aerial-Robotics/A-LOAM, 2018
2018
-
[57]
Loam livox: A fast, robust, high-precision lidar odometry and mapping package for lidars of small fov,
J. Lin and F. Zhang, “Loam livox: A fast, robust, high-precision lidar odometry and mapping package for lidars of small fov,” in2020 IEEE international conference on robotics and automation (ICRA). IEEE, 2020, pp. 3126–3131
2020
-
[58]
chengwei0427, “Ctlo,” https://github.com/chengwei0427/CTLO.git, 2023
2023
-
[59]
Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain,
T. Shan and B. Englot, “Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018, pp. 4758–4765
2018
-
[60]
KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration If Done the Right Way,
I. Vizzo, T. Guadagnino, B. Mersch, L. Wiesmann, J. Behley, and C. Stachniss, “KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration If Done the Right Way,”IEEE Robotics and Automation Letters (RA-L), vol. 8, no. 2, pp. 1029–1036, 2023
2023
-
[61]
PIN-SLAM: LiDAR SLAM Using a Point-Based Implicit Neural Representation for Achieving Global Map Consistency,
Y . Pan, X. Zhong, L. Wiesmann, T. Posewsky, J. Behley, and C. Stachniss, “PIN-SLAM: LiDAR SLAM Using a Point-Based Implicit Neural Representation for Achieving Global Map Consistency,” IEEE Transactions on Robotics (TRO), vol. 40, pp. 4045–4064,
-
[62]
Available: https://www.ipb.uni-bonn.de/wp-content/ papercite-data/pdf/pan2024tro.pdf
[Online]. Available: https://www.ipb.uni-bonn.de/wp-content/ papercite-data/pdf/pan2024tro.pdf
-
[63]
I2ekf-lo: A dual-iteration extended kalman filter based lidar odometry,
W. Yu, J. Xu, C. Zhao, L. Zhao, T.-M. Nguyen, S. Yuan, M. Bai, and L. Xie, “I2ekf-lo: A dual-iteration extended kalman filter based lidar odometry,”2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 10 453–10 460, 2024. [Online]. Available: https://api.semanticscholar.org/CorpusID:270878177
2024
-
[64]
Traj-lo: In defense of lidar-only odometry using an effective continuous-time trajectory,
X. Zheng and J. Zhu, “Traj-lo: In defense of lidar-only odometry using an effective continuous-time trajectory,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1961–1968, 2024
1961
-
[65]
Cte-mlo: Continuous-time and efficient multi-lidar odometry with localizability-aware point cloud sampling,
H. Shen, Z. Wu, Y . Hui, W. Wang, Q. Lyu, T. Deng, Y . Zhu, B. Tian, and D. Wang, “Cte-mlo: Continuous-time and efficient multi-lidar odometry with localizability-aware point cloud sampling,”IEEE Transactions on Field Robotics, 2025
2025
-
[66]
Glo: General lidar-only odometry with high efficiency and low drift,
Y . Su, S. Shao, Z. Zhang, P. Xu, Y . Cao, and H. Cheng, “Glo: General lidar-only odometry with high efficiency and low drift,”IEEE Robotics and Automation Letters, vol. 10, no. 4, pp. 3518–3525, 2025
2025
-
[67]
GenZ-ICP: Generalizable and Degeneracy- Robust LiDAR Odometry Using an Adaptive Weighting,
D. Lee, H. Lim, and S. Han, “GenZ-ICP: Generalizable and Degeneracy- Robust LiDAR Odometry Using an Adaptive Weighting,”IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 1, pp. 152–159, 2025
2025
-
[68]
Towards high-performance solid- state-lidar-inertial odometry and mapping,
K. Li, M. Li, and U. D. Hanebeck, “Towards high-performance solid- state-lidar-inertial odometry and mapping,”IEEE Robotics and Automa- tion Letters, vol. 6, no. 3, pp. 5167–5174, 2021
2021
-
[69]
Log-lio: A lidar-inertial odometry with efficient local geometric information estimation,
K. Huang, J. Zhao, Z. Zhu, C. Ye, and T. Feng, “Log-lio: A lidar-inertial odometry with efficient local geometric information estimation,”IEEE Robotics and Automation Letters, vol. 9, no. 1, pp. 459–466, 2023
2023
-
[70]
chengwei0427, “Ct-lio,” https://github.com/chengwei0427/ct-lio.git, 2023
2023
-
[71]
Lio-livox,
Livox, “Lio-livox,” https://github.com/Livox-SDK/LIO-Livox, 2021
2021
-
[72]
Direct lidar-inertial odometry: Lightweight lio with continuous-time motion correction,
K. Chen, R. Nemiroff, and B. T. Lopez, “Direct lidar-inertial odometry: Lightweight lio with continuous-time motion correction,” in2023 IEEE international conference on robotics and automation (ICRA). IEEE, 2023, pp. 3983–3989
2023
-
[73]
Lins: A lidar-inertial state estimator for robust and efficient navigation,
C. Qin, H. Ye, C. E. Pranata, J. Han, S. Zhang, and M. Liu, “Lins: A lidar-inertial state estimator for robust and efficient navigation,” in 2020 IEEE international conference on robotics and automation (ICRA). IEEE, 2020, pp. 8899–8906
2020
-
[74]
Mm-lins: a multi-map lidar-inertial system for over-degenerate environments,
Y . Ma, J. Xu, S. Yuan, T. Zhi, W. Yu, J. Zhou, and L. Xie, “Mm-lins: a multi-map lidar-inertial system for over-degenerate environments,”IEEE Transactions on Intelligent Vehicles, 2024
2024
-
[75]
Chengwei, “Hm-lio,” https://github.com/chengwei0427/hm-lio.git, 2023
2023
-
[76]
Ieskf-lio,
——, “Ieskf-lio,” https://github.com/chengwei0427/ESKF LIO.git, 2022
2022
-
[77]
Tightly coupled 3d lidar inertial odometry and mapping,
H. Ye, Y . Chen, and M. Liu, “Tightly coupled 3d lidar inertial odometry and mapping,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 3144–3150
2019
-
[78]
Log-lio2: A lidar-inertial odometry with efficient uncertainty analysis,
K. Huang, J. Zhao, J. Lin, Z. Zhu, S. Song, C. Ye, and T. Feng, “Log-lio2: A lidar-inertial odometry with efficient uncertainty analysis,”
-
[79]
Available: https://arxiv.org/abs/2405.01316
[Online]. Available: https://arxiv.org/abs/2405.01316
-
[80]
V oxel-slam: A complete, accurate, and versatile lidar- inertial slam system,
Z. Liu, H. Li, C. Yuan, X. Liu, J. Lin, R. Li, C. Zheng, B. Zhou, W. Liu, and F. Zhang, “V oxel-slam: A complete, accurate, and versatile lidar- inertial slam system,”arXiv preprint arXiv:2410.08935, 2024
arXiv 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.