Optimization-based Safe Trajectory Planning for Autonomous Ground Vehicle in Multi-Floor Scenarios
Pith reviewed 2026-06-25 23:39 UTC · model grok-4.3
The pith
A framework uses generalized Voronoi diagrams and optimization to plan safe trajectories for autonomous ground vehicles across multiple floors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The two-module framework combining GVD-based task planning for floor exit selection with optimization-based trajectory planning, including warm-started hierarchical methods and correlation constraint calculation for obstacle handling, generates high-quality safe trajectories for AGVs in multi-floor scenarios.
What carries the argument
The correlation constraint calculation method that reduces the number of obstacle constraints in the optimization problem.
If this is right
- The warm-started hierarchical planning ensures rapid convergence of the optimization.
- The reduced obstacle constraints lower computational demands while preserving safety.
- Strategic floor exit selection enables efficient multi-floor task completion.
- Simulations demonstrate practical feasibility for autonomous navigation in complex buildings.
Where Pith is reading between the lines
- This approach might extend to other vertical navigation problems such as drone flight in multi-story structures.
- Real-world deployment would require testing the constraint reduction method against dynamic obstacles.
- Integration with sensor data could allow online replanning in changing environments.
Load-bearing premise
The correlation constraint calculation method can reduce obstacle constraints without losing collision avoidance guarantees or introducing unsafe trajectories.
What would settle it
A simulation scenario where an obstacle excluded by the correlation method causes a collision in the generated trajectory.
Figures
read the original abstract
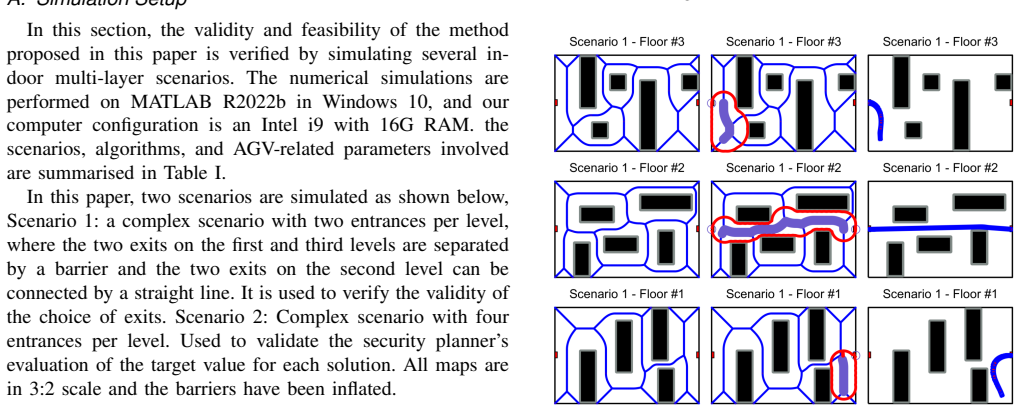
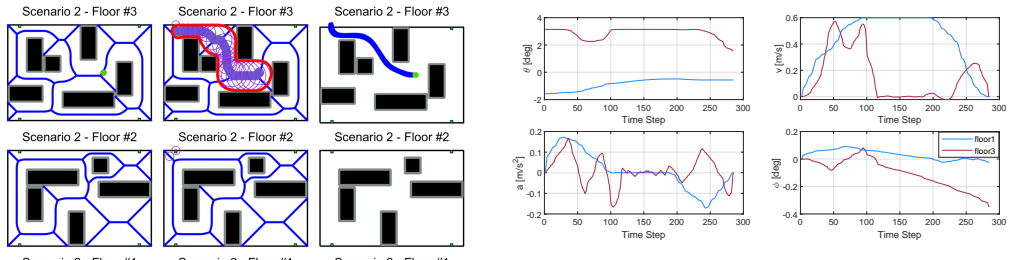
The development of trajectory planning strategies for autonomous ground vehicles (AGVs) represents a prevailing research interest within the domain of intelligent transportation systems. This paper introduces a trajectory planning framework tailored for multi-floor scenarios. The framework consists of two main modules: the task planning module and the trajectory planning module. The task planning module involves a strategic selection phase, where a task planning strategy based on generalized voronoi diagrams (GVD) and multi-objective algorithms is proposed to select the floor exits for each floor. The trajectory planning module utilizes optimization-based methods to generate high-quality trajectories, and a warm-started hierarchical planning framework is designed to ensure rapid convergence. Additionally, for handling complex obstacle constraints, a correlation constraint calculation method is designed for reducing obstacle constraints in trajectory planning. Finally, the feasibility and effectiveness of the proposed framework are verified through simulations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a two-module framework for safe trajectory planning of autonomous ground vehicles in multi-floor scenarios. The task planning module employs generalized Voronoi diagrams (GVD) combined with multi-objective algorithms to select floor exits. The trajectory planning module uses optimization-based trajectory generation within a warm-started hierarchical planning framework, augmented by a correlation constraint calculation method intended to reduce the number of obstacle constraints while preserving collision avoidance. Feasibility and effectiveness are verified exclusively through simulations, including stress cases with dense obstacles.
Significance. If the correlation constraint reduction preserves the feasible set as described, the framework provides a practical efficiency gain for optimization-based planning in cluttered multi-floor settings by lowering the number of active constraints without compromising safety guarantees. The integration of GVD-based exit selection with warm-start hierarchy addresses both global task allocation and local trajectory quality, and the targeted simulation stress cases add credibility to the verification. These elements position the work as an incremental but useful engineering contribution to AGV navigation in vertical environments, though the simulation-only validation keeps the significance moderate rather than transformative.
minor comments (2)
- The abstract states that the correlation constraint method reduces obstacle constraints but provides no quantitative metrics (e.g., average reduction factor, computation time savings, or success rate under varying obstacle densities); adding these in the results section would strengthen the effectiveness claim.
- Simulation results are described without reported error bars, number of Monte Carlo trials, or direct comparison against standard baselines such as plain A* or unconstrained optimization; including such data would improve reproducibility and allow readers to assess the claimed rapid convergence.
Simulated Author's Rebuttal
We thank the referee for the review and the recommendation of minor revision. The summary accurately reflects the two-module framework, GVD-based task selection, optimization-based trajectory generation with warm-start hierarchy, and the correlation constraint reduction method. No specific major comments appear in the report.
Circularity Check
No significant circularity detected
full rationale
The paper describes a composite framework (GVD task planning + optimization-based trajectory generation with warm-start hierarchy and correlation constraint reduction) whose central claim is feasibility verified by simulation. No equations, fitted parameters, or self-citations are presented that reduce any prediction or uniqueness claim to its own inputs by construction. The correlation constraint method is described with explicit geometric redundancy arguments rather than being asserted via self-reference. The derivation chain therefore remains self-contained against external benchmarks and standard algorithmic components.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
G. Du, Y . Zou, X. Zhang, Z. Li, and Q. Liu, “Hierarchical motion planning and tracking for autonomous vehicles using global heuristic based potential field and reinforcement learning based predictive con- trol,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, DOI 10.1109/TITS.2023.3266195, no. 8, pp. 8304–8323, 2023
-
[4]
Embodied footprints: A safety-guaranteed collision-avoidance model for numerical optimization-based trajectory planning,
B. Li, Y . Zhang, T. Zhang, T. Acarman, Y . Ouyang, L. Li, H. Dong, and D. Cao, “Embodied footprints: A safety-guaranteed collision-avoidance model for numerical optimization-based trajectory planning,”IEEE Transactions on Intelligent Transportation Systems, 2023
2023
-
[5]
Deep learning-based trajectory planning and control for autonomous ground vehicle parking maneuver,
R. Chai, D. Liu, T. Liu, A. Tsourdos, Y . Xia, and S. Chai, “Deep learning-based trajectory planning and control for autonomous ground vehicle parking maneuver,”IEEE Transactions on Automation Science and Engineering, vol. 20, DOI 10.1109/TASE.2022.3183610, no. 3, pp. 1633–1647, 2023
-
[6]
Y . Liu, B. Zhou, X. Wang, L. Li, S. Cheng, Z. Chen, G. Li, and L. Zhang, “Dynamic lane-changing trajectory planning for autonomous vehicles based on discrete global trajectory,”IEEE Transactions on Intelli- gent Transportation Systems, vol. 23, DOI 10.1109/TITS.2021.3083541, no. 7, pp. 8513–8527, 2022
-
[7]
C. Shen, S. Yu, B. I. Epureanu, and T. Ersal, “An efficient global trajectory planner for highly dynamical nonholonomic autonomous vehicles on 3-d terrains,”IEEE Transactions on Robotics, vol. 40, DOI 10.1109/TRO.2023.3344030, pp. 1309–1326, 2024
-
[8]
3-d path planning with multiple mo- tions for a gliding robotic dolphin,
J. Wang, Z. Wu, M. Tan, and J. Yu, “3-d path planning with multiple mo- tions for a gliding robotic dolphin,”IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 51, DOI 10.1109/TSMC.2019.2917635, no. 5, pp. 2904–2915, 2021
-
[9]
Diversity-based cooperative multivehicle path planning for risk management in costmap environments,
J. V otion and Y . Cao, “Diversity-based cooperative multivehicle path planning for risk management in costmap environments,”IEEE Transac- tions on Industrial Electronics, vol. 66, DOI 10.1109/TIE.2018.2874587, no. 8, pp. 6117–6127, 2019
-
[10]
R. Zhang, R. Chai, S. Chai, Y . Xia, and A. Tsourdos, “Design and prac- tical implementation of a high efficiency two-layer trajectory planning method for agv,”IEEE Transactions on Industrial Electronics, vol. 71, DOI 10.1109/TIE.2023.3250847, no. 2, pp. 1811–1822, 2024
-
[11]
Wgit*: Workspace-guided informed tree for motion planning in re- stricted environments,
Z. Zhang, Y . Chen, F. Han, J. Fan, H. Yu, H. Zhang, and Y . Wang, “Wgit*: Workspace-guided informed tree for motion planning in re- stricted environments,”IEEE/ASME Transactions on Mechatronics, 2024
2024
-
[12]
Accelerating kinodynamic rrt* through dimensionality reduction,
D. Zheng and P. Tsiotras, “Accelerating kinodynamic rrt* through dimensionality reduction,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), DOI 10.1109/IROS51168.2021.9636754, pp. 3674–3680, 2021
-
[14]
Two-stage trajectory optimization for autonomous ground vehicles parking ma- neuver,
R. Chai, A. Tsourdos, A. Savvaris, S. Chai, and Y . Xia, “Two-stage trajectory optimization for autonomous ground vehicles parking ma- neuver,”IEEE Transactions on Industrial Informatics, vol. 15, DOI 10.1109/TII.2018.2883545, no. 7, pp. 3899–3909, 2019
-
[15]
G. Tang, F. Jiang, and J. Li, “Fuel-optimal low-thrust trajectory opti- mization using indirect method and successive convex programming,” IEEE Transactions on Aerospace and Electronic Systems, vol. 54, DOI 10.1109/TAES.2018.2803558, no. 4, pp. 2053–2066, 2018
-
[16]
Advances in flexible robotic manipulator systems-part ii: Planning, control, applications, and per- spectives,
B. Li, X. Li, H. Gao, and F.-Y . Wang, “Advances in flexible robotic manipulator systems-part ii: Planning, control, applications, and per- spectives,”IEEE/ASME Transactions on Mechatronics, 2024
2024
-
[17]
R. Chai, A. Tsourdos, S. Chai, Y . Xia, A. Savvaris, and C. L. P. Chen, “Multiphase overtaking maneuver planning for autonomous ground vehi- cles via a desensitized trajectory optimization approach,”IEEE Transac- tions on Industrial Informatics, vol. 19, DOI 10.1109/TII.2022.3168434, no. 1, pp. 74–87, Jan. 2023
-
[18]
B. Li, T. Acarman, Y . Zhang, Y . Ouyang, C. Yaman, Q. Kong, X. Zhong, and X. Peng, “Optimization-based trajectory planning for autonomous parking with irregularly placed obstacles: A lightweight iterative frame- work,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, DOI 10.1109/TITS.2021.3109011, no. 8, pp. 11 970–11 981, 2022
-
[19]
T. Liu, R. Chai, S. Chai, and Y . Xia, “Chance-constrained tra- jectory optimization for automatic parking based on conservative approximation,”IEEE Transactions on Vehicular Technology, DOI 10.1109/TVT.2023.3342421, pp. 1–11, 2023
-
[21]
P. Scheffe, T. M. Henneken, M. Kloock, and B. Alrifaee, “Sequential convex programming methods for real-time optimal trajectory planning in autonomous vehicle racing,”IEEE Transactions on Intelligent Vehi- cles, vol. 8, DOI 10.1109/TIV .2022.3168130, no. 1, pp. 661–672, 2023
work page doi:10.1109/tiv 2022
-
[22]
A hierarchical algorithm for probabilistically complete path planning in multi-floor environments,
S. Curtis, “A hierarchical algorithm for probabilistically complete path planning in multi-floor environments,” Ph.D. dissertation, Massachusetts Institute of Technology, 2021
2021
-
[23]
Research on multi-floor path planning based on recommendation factors,
Y . Wang and H. Yu, “Research on multi-floor path planning based on recommendation factors,” inHuman Centered Computing, Q. Zu, Y . Tang, and V . Mladenovi ´c, Eds., pp. 238–245. Cham: Springer International Publishing, 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.