PhyRoGen: Synthetic Generation of Physical Robot Manipulation Puzzles Using Procedural Content Generation
Pith reviewed 2026-06-28 01:18 UTC · model grok-4.3
The pith
PhyRoGen uses procedural content generation to automatically create unique physical robot manipulation puzzles with interlocking object dependencies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
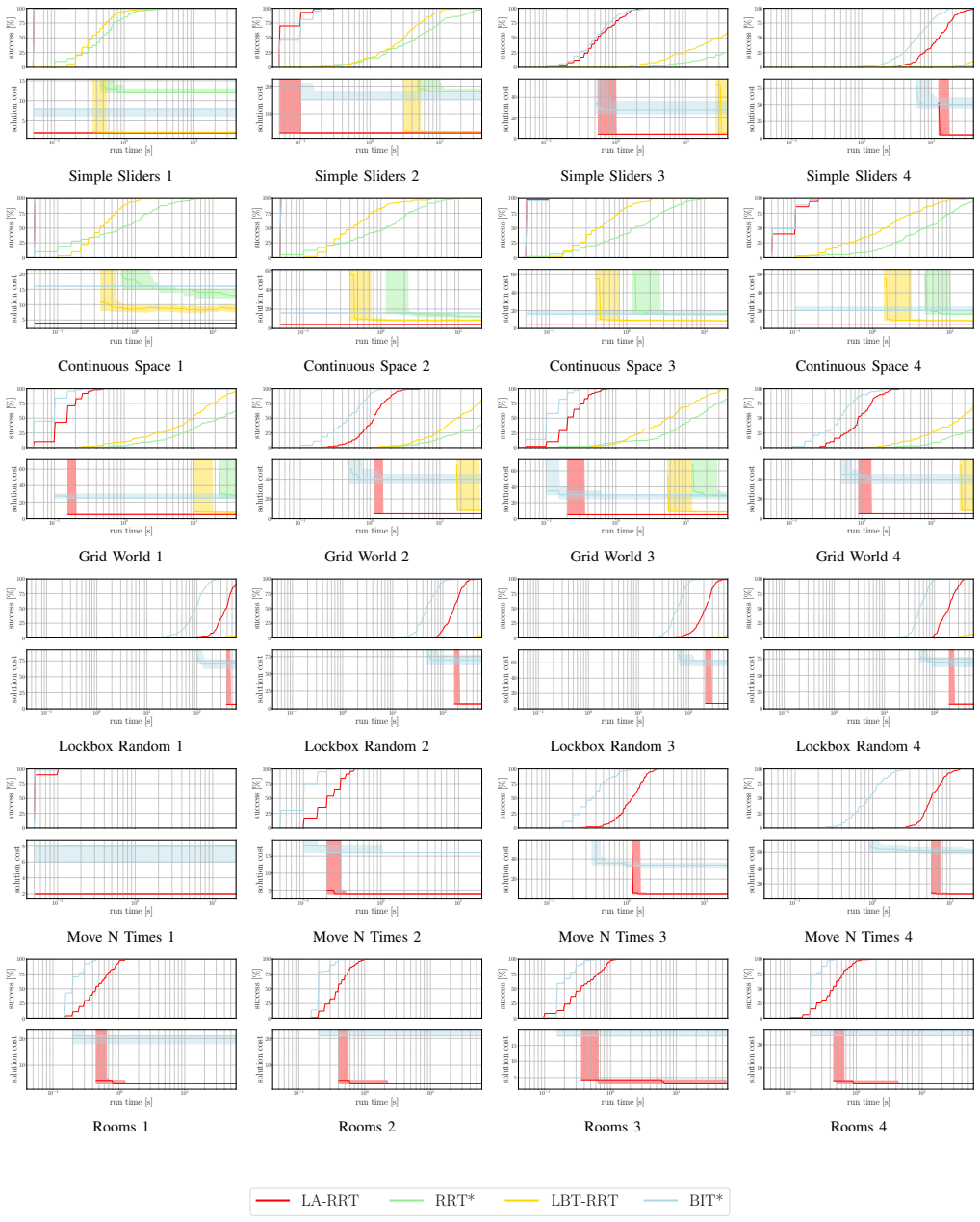
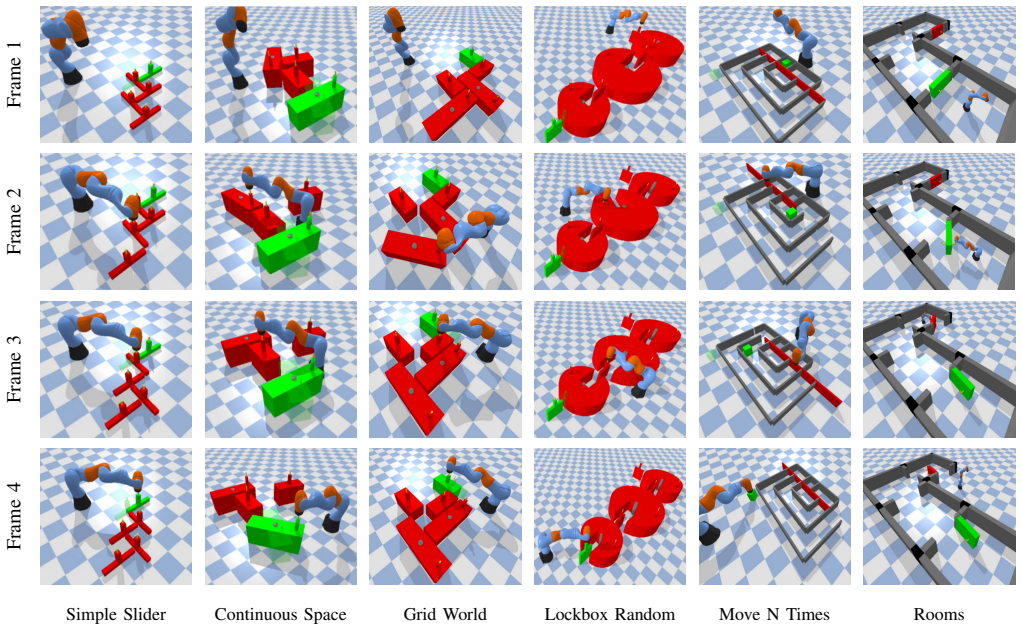
PhyRoGen is a general-purpose framework that leverages procedural content generation to produce physical puzzles featuring interlocking object dependencies, where one articulated object must be manipulated before another can be moved. Six concrete generators defined within PhyRoGen yielded 24 puzzles. All 24 puzzles were solved by sampling-based planning algorithms in 1 to 300 seconds, and each was demonstrated to be manipulatable by a KUKA LBR iiwa robot in physical simulation. The framework thereby produces unique, solvable robot manipulation puzzles suitable for benchmarking manipulation algorithms and developing foundation models.
What carries the argument
The PhyRoGen framework, which encodes procedural rules into six concrete generators that create puzzles defined by sequential manipulation requirements arising from physical interlocking dependencies.
If this is right
- Large collections of distinct, solvable puzzles can be produced without manual design for each instance.
- Manipulation algorithms gain standardized test cases that vary in their dependency structures.
- Training datasets for learning-based manipulation methods become available at lower human effort.
- The generated puzzles support repeated benchmarking runs because each instance is known to be solvable in simulation.
Where Pith is reading between the lines
- The same procedural approach could be extended to generate puzzles with higher numbers of interlocks to stress-test more sophisticated planners.
- If the simulation-to-real transfer holds, the puzzles could function as standardized physical test artifacts for hardware validation.
- The method opens a path to procedural generation of related tasks such as automated assembly or disassembly sequences.
Load-bearing premise
The puzzles generated by the six concrete generators have interlocking dependencies that remain physically valid and whose simulated solutions match actions a real robot can perform.
What would settle it
A physical robot executing the planned sequences on the generated puzzles fails to complete the manipulations because of unmodeled contact forces, friction, or dynamics present in the real world but absent from simulation.
Figures
read the original abstract
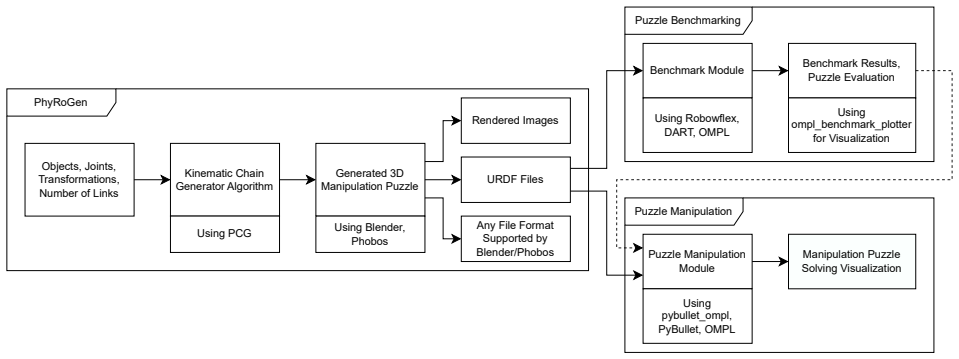
Robot manipulation of physical puzzles is important for automatic assembly and disassembly tasks. However, to enable robots to solve physical puzzles, manipulation skills need to be learned, which requires large training datasets, the generation of which is often time consuming and tedious. To overcome this problem, we propose the Physical Robot Manipulation Puzzle Generation framework (PhyRoGen), which leverages procedural content generation (PCG) for automated generation of synthetic datasets of manipulation puzzles. PhyRoGen is a general-purpose puzzle generator, which can generate physical puzzles with interlocking object dependencies, where one articulated object must be manipulated before another can be moved. Based upon PhyRoGen, we define six concrete generators which we use to generate 24 physical puzzles. By using a benchmarking framework, we are able to solve all puzzles in 1 to 300 seconds using sampling-based planning algorithms. Finally, we demonstrate that every generated puzzle is manipulatable by using a KUKA LBR iiwa robot in a physical simulation. This shows that our framework is able to procedurally generate unique, solvable robot manipulation puzzles, which is a crucial ingredient to benchmark manipulation algorithms and to develop robust foundation models.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
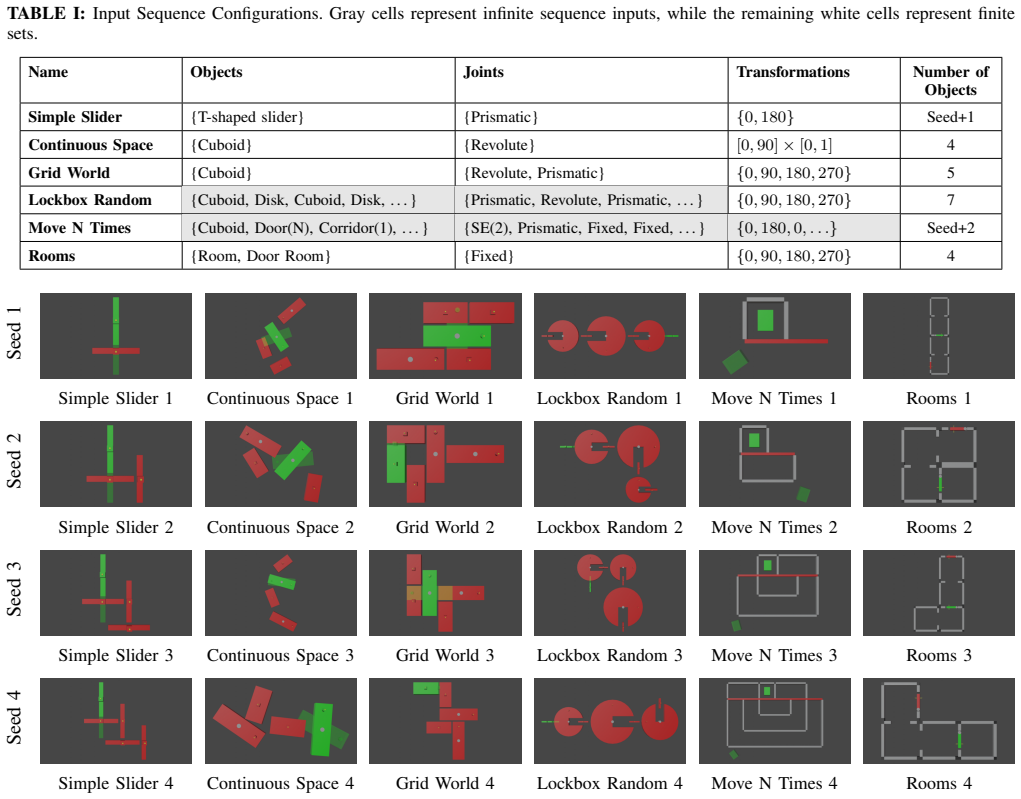
Summary. The paper introduces PhyRoGen, a procedural content generation (PCG) framework for automatically synthesizing datasets of physical robot manipulation puzzles that feature interlocking object dependencies (one articulated object must be manipulated before another can move). Six concrete generators are defined and used to produce 24 puzzles; all are reported solvable via sampling-based planning in 1–300 s and demonstrated manipulable by a KUKA LBR iiwa in simulation. The central claim is that this framework supplies unique, solvable puzzles suitable for benchmarking manipulation algorithms and training foundation models.
Significance. If the interlocking dependencies are shown to be physically enforced rather than artifacts of planner constraints or initial conditions, the framework could supply scalable synthetic data for manipulation research. The constructive nature of the generators and the explicit demonstration of simulation solvability are positive features, but the absence of quantitative validation metrics, error analysis, or physical-validity tests limits the immediate impact.
major comments (3)
- [Abstract / benchmarking section] Abstract and § on benchmarking/results: solvability of all 24 puzzles in 1–300 s via sampling-based planning is reported, yet no quantitative test (e.g., collision counts, forced-order violation rates, or comparison against a non-interlocking baseline) is supplied to confirm that the claimed interlocking dependencies arise from the physics engine rather than planner heuristics or initial pose constraints.
- [Generator definitions] Description of the six concrete generators: the procedural rules are stated to produce “interlocking object dependencies,” but the manuscript provides no explicit mechanism (e.g., joint limits, collision geometry, or stability checks) that would make bypassing an interlock physically impossible inside the simulator; solvability alone does not establish this.
- [Simulation experiments] KUKA LBR iiwa simulation demonstration: the claim that “every generated puzzle is manipulatable” is supported only by successful execution; no metrics on grasp success rate, trajectory deviation, or failure modes under perturbed initial conditions are given, leaving open whether the generated puzzles test sequential manipulation or merely planner reachability.
minor comments (2)
- [Abstract] The abstract states “24 physical puzzles” but the text does not clarify whether these are distinct up to rigid transformation or merely 24 instances; a table enumerating generator-to-puzzle mapping would improve clarity.
- [Methods] No mention of the underlying physics engine parameters (friction, contact solver tolerance) or whether the same parameters are used for both generation and planning validation.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback. The comments correctly identify areas where additional evidence would strengthen the paper's claims regarding the physical enforcement of interlocking dependencies. We address each point below and commit to revisions that incorporate the suggested validations.
read point-by-point responses
-
Referee: [Abstract / benchmarking section] Abstract and § on benchmarking/results: solvability of all 24 puzzles in 1–300 s via sampling-based planning is reported, yet no quantitative test (e.g., collision counts, forced-order violation rates, or comparison against a non-interlocking baseline) is supplied to confirm that the claimed interlocking dependencies arise from the physics engine rather than planner heuristics or initial pose constraints.
Authors: We agree with this observation. The current results focus on solvability times but do not include quantitative tests to isolate the effect of physical interlocks. In the revised manuscript, we will add quantitative metrics including collision counts during planning, rates of forced-order violations, and comparisons to non-interlocking baseline puzzles. This will be presented in an expanded benchmarking section to demonstrate that the dependencies are enforced by the physics engine. revision: yes
-
Referee: [Generator definitions] Description of the six concrete generators: the procedural rules are stated to produce “interlocking object dependencies,” but the manuscript provides no explicit mechanism (e.g., joint limits, collision geometry, or stability checks) that would make bypassing an interlock physically impossible inside the simulator; solvability alone does not establish this.
Authors: The manuscript outlines the procedural rules for generating puzzles with interlocking dependencies but does not provide detailed descriptions of the simulator-level mechanisms. We will revise the section on generator definitions to explicitly specify the physical mechanisms, including joint limits, collision geometries, and stability checks that prevent bypassing the interlocks. This will clarify how the dependencies are physically enforced. revision: yes
-
Referee: [Simulation experiments] KUKA LBR iiwa simulation demonstration: the claim that “every generated puzzle is manipulatable” is supported only by successful execution; no metrics on grasp success rate, trajectory deviation, or failure modes under perturbed initial conditions are given, leaving open whether the generated puzzles test sequential manipulation or merely planner reachability.
Authors: We recognize that the simulation results are presented only as successful demonstrations without supporting metrics. To address this, the revised version will include quantitative metrics such as grasp success rates over multiple trials, average trajectory deviations, and performance under perturbed initial conditions. This will better illustrate that the puzzles challenge sequential manipulation capabilities. revision: yes
Circularity Check
No circularity: constructive PCG framework with direct simulation demonstration
full rationale
The paper describes a procedural content generation framework (PhyRoGen) that defines six concrete generators to produce 24 puzzles, then reports that sampling-based planners solve all of them in simulation and that a KUKA LBR iiwa model can manipulate them. No equations, parameter fitting, or derivation chain exists. The central claim is that the generators produce solvable interlocking puzzles; this is shown by explicit construction and planner output rather than by reducing any quantity to a fitted input or self-citation. The work is self-contained as an engineering artifact whose outputs are directly exhibited.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Procedural generators can produce puzzles whose interlocking dependencies require sequential manipulation and remain physically valid.
Reference graph
Works this paper leans on
-
[1]
Motionbenchmaker: A tool to generate and benchmark motion planning datasets,
C. Chamzas, C. Quintero-Peña, Z. Kingston, A. Orthey, D. Rakita, M. Gleicher, M. Toussaint, and L. E. Kavraki, “Motionbenchmaker: A tool to generate and benchmark motion planning datasets,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 882–889, apr 2022
2022
-
[2]
Benchmarking motion planning algorithms: An extensible infrastructure for analysis and visualization,
M. Moll, I. A. Sucan, and L. E. Kavraki, “Benchmarking motion planning algorithms: An extensible infrastructure for analysis and visualization,”IEEE Robotics and Automation Magazine, vol. 22, no. 3, pp. 96–102, 2015
2015
-
[3]
A review of robot learning for manipulation: Challenges, representations, and algorithms,
O. Kroemer, S. Niekum, and G. Konidaris, “A review of robot learning for manipulation: Challenges, representations, and algorithms,”Jour- nal of Machine Learning Research, vol. 22, no. 30, pp. 1–82, 2021
2021
-
[4]
Foundation models in robotics: Applications, challenges, and the future,
R. Firoozi, J. Tucker, S. Tianet al., “Foundation models in robotics: Applications, challenges, and the future,”International Journal of Robotics Research, vol. 44, no. 5, pp. 701–739, 2025
2025
-
[5]
Generative artificial intelligence in robotic manipulation: A survey,
K. Zhang, P. Yun, J. Cenet al., “Generative artificial intelligence in robotic manipulation: A survey,”CoRR, vol. abs/2503.03464, 2025
arXiv 2025
-
[6]
Procthor: Large-scale embodied ai using procedural generation,
M. Deitke, E. VanderBilt, A. Herrastiet al., “Procthor: Large-scale embodied ai using procedural generation,”Advances in Neural Infor- mation Processing Systems, vol. 35, pp. 5982–5994, 2022
2022
-
[7]
Opening a lockbox through physical exploration,
M. Baum, M. Bernstein, R. Martin-Martinet al., “Opening a lockbox through physical exploration,” inIEEE International Conference on Humanoid Robots. IEEE, 2017, pp. 461–467
2017
-
[8]
Solving rearrangement puzzles using path defragmentation in factored state spaces,
S. B. Bayraktar, A. Orthey, Z. Kingston, M. Toussaint, and L. E. Kavraki, “Solving rearrangement puzzles using path defragmentation in factored state spaces,”IEEE Robotics and Automation Letters, vol. 8, no. 8, pp. 4529–4536, 2023
2023
-
[9]
Manipula- tion planning with probabilistic roadmaps,
T. Siméon, J.-P. Laumond, J. Cortés, and A. Sahbani, “Manipula- tion planning with probabilistic roadmaps,”International Journal of Robotics Research, vol. 23, no. 7–8, pp. 729–746, 2004
2004
-
[10]
Blender,
B. O. Community, “Blender,” Blender Foundation, Stichting Blender Foundation, Amsterdam, 2021
2021
-
[11]
Phobos: A tool for creating complex robot models,
K. von Szadkowski and S. Reichel, “Phobos: A tool for creating complex robot models,”Journal of Open Source Software, vol. 5, no. 45, p. 1326, 2020
2020
-
[12]
Robowflex: Robot motion planning with moveit made easy,
Z. Kingston and L. E. Kavraki, “Robowflex: Robot motion planning with moveit made easy,” inIEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2022, pp. 3108–3114
2022
-
[13]
Dart: Dynamic animation and robotics toolkit,
J. Lee, M. X. Grey, S. Haet al., “Dart: Dynamic animation and robotics toolkit,”Journal of Open Source Software, vol. 3, no. 22, p. 500, 2018
2018
-
[14]
The open motion planning library,
I. A. Sucan, M. Moll, and L. E. Kavraki, “The open motion planning library,”IEEE Robotics and Automation Magazine, vol. 19, no. 4, pp. 72–82, 2012
2012
-
[15]
Pybullet, a python module for physics simulation for games, robotics and machine learning,
E. Coumans and Y . Bai, “Pybullet, a python module for physics simulation for games, robotics and machine learning,” 2021
2021
-
[16]
What is procedural content generation? mario on the borderline,
J. Togelius, E. Kastbjerg, D. Schedl, and G. N. Yannakakis, “What is procedural content generation? mario on the borderline,” inInterna- tional Workshop on Procedural Content Generation in Games, 2011, pp. 1–6
2011
-
[17]
Shaker, J
N. Shaker, J. Togelius, and M. J. Nelson,Procedural Content Gener- ation in Games: A Textbook and an Overview of Current Research. Springer, 2016
2016
-
[18]
Harris,Exploring Roguelike Games
J. Harris,Exploring Roguelike Games. CRC Press, 2020
2020
-
[19]
Procedural dungeon generation: A survey,
B. M. F. Viana and S. R. dos Santos, “Procedural dungeon generation: A survey,”Journal on Interactive Systems, vol. 12, no. 1, pp. 83–101, 2021
2021
-
[20]
Procedural content generation for games: A survey,
M. Hendrikx, S. Meijer, J. Van Der Velden, and A. Iosup, “Procedural content generation for games: A survey,”ACM Transactions on Multimedia Computing, Communications, and Applications, vol. 9, no. 1, pp. 1–22, 2013
2013
-
[21]
Comparing pcg metrics with human evaluation in minecraft settlement generation,
J.-B. Hervé and C. Salge, “Comparing pcg metrics with human evaluation in minecraft settlement generation,” inProceedings of the International Conference on the Foundations of Digital Games, 2021, pp. 1–15
2021
-
[22]
Wor(l)d-gan: To- ward natural-language-based pcg in minecraft,
M. Awiszus, F. Schubert, and B. Rosenhahn, “Wor(l)d-gan: To- ward natural-language-based pcg in minecraft,”IEEE Transactions on Games, vol. 15, no. 2, pp. 182–192, 2022
2022
-
[23]
Procedural puzzle generation: A survey,
B. De Kegel and M. Haahr, “Procedural puzzle generation: A survey,” IEEE Transactions on Games, vol. 12, no. 1, pp. 21–40, 2019
2019
-
[24]
Procedural level generation for sokoban via deep learning: An experimental study,
Y . Zakaria, M. Fayek, and M. Hadhoud, “Procedural level generation for sokoban via deep learning: An experimental study,”IEEE Trans- actions on Games, vol. 15, no. 1, pp. 108–120, 2022
2022
-
[25]
Sokoban is pspace-complete,
J. Culberson, “Sokoban is pspace-complete,”IEICE Technical Report, 1997
1997
-
[26]
Data-driven sokoban puzzle generation with monte carlo tree search,
B. Kartal, N. Sohre, and S. J. Guy, “Data-driven sokoban puzzle generation with monte carlo tree search,” inProceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment, vol. 12, 2016, pp. 58–64
2016
-
[27]
Taylor,The Procedural Generation of Interesting Sokoban Levels
J. Taylor,The Procedural Generation of Interesting Sokoban Levels. University of North Texas, 2015
2015
-
[28]
Generating sokoban levels that are interesting to play using simulation,
S. Karmanet al., “Generating sokoban levels that are interesting to play using simulation,” Master’s thesis, Utrecht University, 2018
2018
-
[29]
R. S. Sutton and A. G. Barto,Reinforcement Learning: An Introduc- tion. MIT Press, 2018
2018
-
[30]
The arcade learning environment: An evaluation platform for general agents,
M. G. Bellemare, Y . Naddaf, J. Veness, and M. Bowling, “The arcade learning environment: An evaluation platform for general agents,” Journal of Artificial Intelligence Research, vol. 47, pp. 253–279, 2013
2013
-
[31]
Human-level control through deep reinforcement learning,
V . Mnih, K. Kavukcuoglu, D. Silver, A. A. Rusu, J. Veness, M. G. Bellemare, A. Graves, M. Riedmiller, A. K. Fidjeland, G. Ostrovski et al., “Human-level control through deep reinforcement learning,” Nature, vol. 518, no. 7540, pp. 529–533, 2015
2015
-
[32]
Grandmaster level in starcraft ii using multi-agent reinforcement learning,
O. Vinyals, I. Babuschkin, W. M. Czarnecki, M. Mathieu, A. Dudzik, J. Chung, D. H. Choi, R. Powell, T. Ewalds, P. Georgievet al., “Grandmaster level in starcraft ii using multi-agent reinforcement learning,”Nature, vol. 575, no. 7782, pp. 350–354, 2019
2019
-
[33]
Leveraging procedu- ral generation to benchmark reinforcement learning,
K. Cobbe, C. Hesse, J. Hilton, and J. Schulman, “Leveraging procedu- ral generation to benchmark reinforcement learning,” inProceedings of the International Conference on Machine Learning. PMLR, 2020, pp. 2048–2056
2020
-
[34]
Minihack the planet: A sandbox for open-ended reinforcement learning research,
M. Samvelyan, R. Kirk, V . Kurinet al., “Minihack the planet: A sandbox for open-ended reinforcement learning research,” inNeural Information Processing Systems, 2021
2021
-
[35]
Robot learning in the era of foundation models: A survey,
X. Xiao, J. Liu, Z. Wanget al., “Robot learning in the era of foundation models: A survey,”Neurocomputing, p. 129963, 2025
2025
-
[36]
Reinforcement learning in robotics: A survey,
J. Kober, J. A. Bagnell, and J. Peters, “Reinforcement learning in robotics: A survey,”International Journal of Robotics Research, vol. 32, no. 11, pp. 1238–1274, 2013
2013
-
[37]
Solving rubik’s cube with a robot hand,
OpenAI, I. Akkaya, M. Andrychowiczet al., “Solving rubik’s cube with a robot hand,”ArXiv Preprint, 2019
2019
-
[38]
Cluttergen: A cluttered scene generator for robot learning,
Y . Jia and B. Chen, “Cluttergen: A cluttered scene generator for robot learning,” inProceedings of the Conference on Robot Learning, 2024
2024
-
[39]
Meta-world: A benchmark and evalu- ation for multi-task and meta reinforcement learning,
T. Yu, D. Quillen, Z. Heet al., “Meta-world: A benchmark and evalu- ation for multi-task and meta reinforcement learning,” inProceedings of the Conference on Robot Learning. PMLR, 2020, pp. 1094–1100
2020
-
[40]
Rlbench: The robot learning benchmark and learning environment,
S. James, Z. Ma, D. R. Arrojo, and A. J. Davison, “Rlbench: The robot learning benchmark and learning environment,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3019–3026, 2020
2020
-
[41]
Hierarchical task and motion planning in the now,
L. P. Kaelbling and T. Lozano-Pérez, “Hierarchical task and motion planning in the now,” inIEEE International Conference on Robotics and Automation. IEEE, 2011, pp. 1470–1477
2011
-
[42]
Integrated task and mo- tion planning,
C. R. Garrett, R. Chitnis, R. Holladayet al., “Integrated task and mo- tion planning,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 4, no. 1, pp. 265–293, 2021
2021
-
[43]
PaLM-e: An embodied multimodal language model,
D. Driess, F. Xia, M. S. M. Sajjadiet al., “PaLM-e: An embodied multimodal language model,” inProceedings of the International Con- ference on Machine Learning, ser. Proceedings of Machine Learning Research, A. e. a. Krause, Ed., vol. 202. PMLR, 23–29 Jul 2023, pp. 8469–8488
2023
-
[44]
Differentiable physics and stable modes for tool-use and manipulation planning,
M. A. Toussaint, K. R. Allen, K. A. Smith, and J. B. Tenenbaum, “Differentiable physics and stable modes for tool-use and manipulation planning,” inProceedings of Robotics: Science and Systems, 2018
2018
-
[45]
Exploring implicit spaces for constrained sampling-based planning,
Z. Kingston, M. Moll, and L. E. Kavraki, “Exploring implicit spaces for constrained sampling-based planning,”International Journal of Robotics Research, vol. 38, no. 10-11, pp. 1151–1178, 2019
2019
-
[46]
Fast high-quality tabletop rearrangement in bounded workspace,
K. Gao, D. Lau, B. Huang, K. E. Bekris, and J. Yu, “Fast high-quality tabletop rearrangement in bounded workspace,” inIEEE International Conference on Robotics and Automation. IEEE, 2022, pp. 1961–1967
2022
-
[47]
Re-assembling the past: The repair dataset and benchmark for real world 2d and 3d puzzle solving,
T. Tsesmelis, L. Palmieri, M. Khoroshiltsevaet al., “Re-assembling the past: The repair dataset and benchmark for real world 2d and 3d puzzle solving,”Advances in Neural Information Processing Systems, vol. 37, pp. 30 076–30 105, 2024
2024
-
[48]
Rrt-connect: An efficient approach to single-query path planning,
J. J. Kuffner and S. M. LaValle, “Rrt-connect: An efficient approach to single-query path planning,” inIEEE International Conference on Robotics and Automation, vol. 2. IEEE, 2000, pp. 995–1001
2000
-
[49]
Conlan,The Blender Python API: Precision 3D Modeling and Add- on Development
C. Conlan,The Blender Python API: Precision 3D Modeling and Add- on Development. Apress, 2017
2017
-
[50]
Sampling-based motion planning: A comparative review,
A. Orthey, C. Chamzas, and L. E. Kavraki, “Sampling-based motion planning: A comparative review,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 7, no. 1, pp. 285–310, 2024
2024
-
[51]
J. J. Craig,Introduction to Robotics: Mechanics and Control, 4th ed. Upper Saddle River, NJ: Pearson, 2017
2017
-
[52]
Batch informed trees (bit*): Informed asymptotically optimal anytime search,
J. D. Gammell, T. D. Barfoot, and S. S. Srinivasa, “Batch informed trees (bit*): Informed asymptotically optimal anytime search,”Inter- national Journal of Robotics Research, vol. 39, no. 5, pp. 543–567, 2020
2020
-
[53]
Sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,”International Journal of Robotics Research, vol. 30, no. 7, pp. 846–894, 2011
2011
-
[54]
Asymptotically near-optimal rrt for fast, high-quality motion planning,
O. Salzman and D. Halperin, “Asymptotically near-optimal rrt for fast, high-quality motion planning,”IEEE Transactions on Robotics, vol. 32, no. 3, pp. 473–483, 2016
2016
-
[55]
Asymptotically optimal sampling- based motion planning methods,
J. D. Gammell and M. P. Strub, “Asymptotically optimal sampling- based motion planning methods,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 4, no. 1, pp. 295–318, 2021
2021
-
[56]
A survey of optimization-based task and motion planning: From classical to learning approaches,
Z. Zhao, S. Cheng, Y . Dinget al., “A survey of optimization-based task and motion planning: From classical to learning approaches,” IEEE/ASME Transactions on Mechatronics, 2024
2024
-
[57]
Section patterns: Efficiently solving narrow passage problems in multilevel motion planning,
A. Orthey and M. Toussaint, “Section patterns: Efficiently solving narrow passage problems in multilevel motion planning,”IEEE Trans- actions on Robotics, vol. 37, pp. 1891–1905, 2021
1905
-
[58]
Bitkomo: Combining sampling and optimization for fast convergence in optimal motion planning,
J. Kamat, J. Ortiz-Haro, M. Toussaint, F. T. Pokorny, and A. Orthey, “Bitkomo: Combining sampling and optimization for fast convergence in optimal motion planning,” inInternational Conference on Intelligent Robots and Systems, 2022, pp. 4492–4497
2022
-
[59]
Ad- versarial reinforcement learning for procedural content generation,
L. Gisslén, A. Eakins, C. Gordillo, J. Bergdahl, and K. Tollmar, “Ad- versarial reinforcement learning for procedural content generation,” in Proceedings of the IEEE Conference on Games. IEEE, 2021, pp. 1–8
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.