Basis construction for polynomial spline spaces over arbitrary T-meshes
Pith reviewed 2026-05-18 22:27 UTC · model grok-4.3
The pith
A method converts arbitrary T-meshes to diagonalizable form via edge extension, then assigns local tensor-product B-splines to each part of the dimension formula to produce a complete, linearly independent basis.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
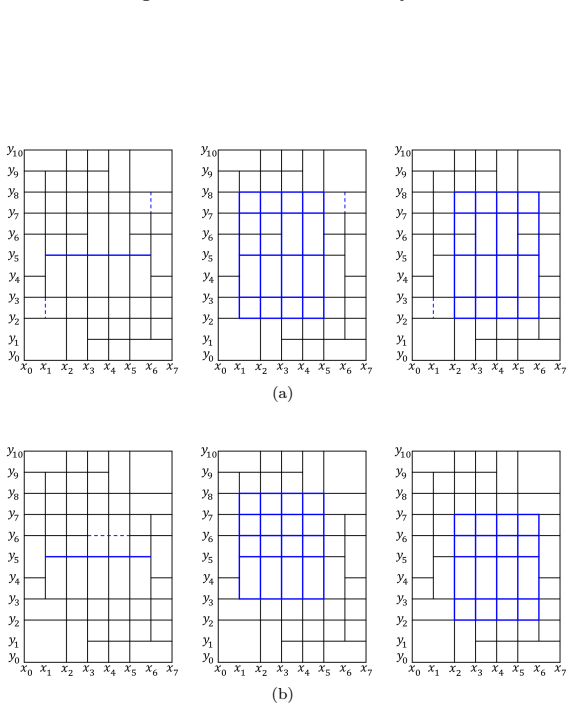
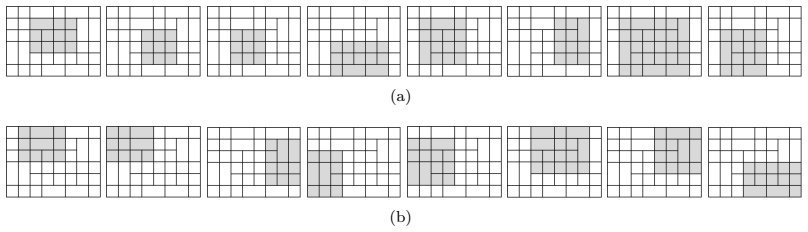
We construct spline basis functions for an arbitrary T-mesh by first converting the T-mesh into a diagonalizable one via edge extension, ensuring a stable dimension of the spline space. Basis functions over the diagonalizable T-mesh are constructed according to the three components in the dimension formula corresponding to cross-cuts, rays, and T l-edges, and each component is assigned some local tensor product B-splines as the basis functions. We prove this set of functions constitutes a basis for the diagonalizable T-mesh. To remove redundant edges from extension, we introduce a technique, termed Extended Edge Elimination (EEE) to construct a basis for an arbitrary T-mesh while reducing 0.
What carries the argument
Edge extension of an arbitrary T-mesh to a diagonalizable T-mesh whose dimension formula decomposes into independent cross-cut, ray, and T l-edge contributions, each assigned a collection of local tensor-product B-splines.
If this is right
- The constructed functions are linearly independent and span the entire spline space on any T-mesh.
- PT-splines apply to general T-meshes, unlike LR B-splines which require LR-meshes and may lose linear independence.
- Dimensional instability of a spline space on a T-mesh is directly tied to degradation of the associated basis functions.
- For certain hierarchical T-meshes the PT-spline basis outperforms the HB-spline basis in stability and completeness.
Where Pith is reading between the lines
- The construction could support adaptive refinement strategies in isogeometric analysis on meshes that contain arbitrary T-junction configurations.
- The Extended Edge Elimination step might be adapted to other spline spaces defined by dimension formulas that admit similar decompositions.
- Numerical tests on successively refined T-meshes could verify that the basis remains stable under the removal of extension edges.
Load-bearing premise
Extending edges produces a diagonalizable T-mesh whose spline-space dimension equals that of the original mesh and whose dimension formula splits cleanly into three non-overlapping contributions that can each be covered exactly by local tensor-product B-splines.
What would settle it
For a concrete arbitrary T-mesh, build the proposed basis functions, form the matrix whose columns are their coefficients in a standard monomial basis over each element, and check whether the matrix has full column rank equal to the known dimension of the spline space.
Figures













read the original abstract
This paper presents the first method for constructing bases for polynomial spline spaces over an arbitrary T-meshes (PT-splines for short). We construct spline basis functions for an arbitrary T-mesh by first converting the T-mesh into a diagonalizable one via edge extension, ensuring a stable dimension of the spline space. Basis functions over the diagoalizable T-mesh are constructed according to the three components in the dimension formula corresponding to cross-cuts, rays, and T $l$-edges in the diagonalizable T-mesh, and each component is assigned some local tensor product B-splines as the basis functions. We prove this set of functions constitutes a basis for the diagonalizable T-mesh. To remove redundant edges from extension, we introduce a technique, termed Extended Edge Elimination (EEE) to construct a basis for an arbitrary T-mesh while reducing structural constraints and unnecessary refinements. The resulting PT-spline basis ensures linear independence and completeness, supported by a dedicated construction algorithm. A comparison with LR B-splines, which may lack linear independence and are limited to LR-meshes, highlights the PT-spline's versatility across any T-mesh. Examples are also provided to demonstrate that dimensional instability in spline spaces is related with basis function degradation and that PT-splines are advantageous over HB-splines for certain hierarchical T-meshes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to introduce the first general method for constructing bases (PT-splines) for polynomial spline spaces over arbitrary T-meshes. The construction proceeds by extending an arbitrary T-mesh to a diagonalizable one via edge extension (preserving dimension), assigning local tensor-product B-splines separately to the cross-cut, ray, and T l-edge contributions of the dimension formula, proving linear independence and completeness for the diagonalizable case, and then applying a new Extended Edge Elimination (EEE) procedure to recover a basis for the original mesh while removing redundant edges. The work includes a construction algorithm, comparisons to LR B-splines (noting their restrictions and potential lack of independence) and HB-splines, and examples linking dimensional instability to basis degradation.
Significance. If the proofs of dimension preservation under extension and linear independence after EEE are correct, the result would be significant: it supplies an explicit, algorithmically realizable basis for spline spaces on completely general T-meshes, removing the LR-mesh restriction of LR B-splines and the independence issues sometimes encountered with hierarchical constructions. The explicit decomposition into three families of local B-splines and the EEE reduction step are technically novel contributions that could be useful in isogeometric analysis and adaptive spline modeling.
major comments (2)
- [edge-extension construction and dimension-formula decomposition] The load-bearing step is the assertion that edge extension leaves the spline-space dimension unchanged and that the dimension formula decomposes cleanly into independent cross-cut, ray, and T l-edge contributions that can each be assigned disjoint local tensor-product B-splines. This claim appears in the construction preceding the proof for the diagonalizable mesh; if any added edge creates an unaccounted multiplicity or new T-junction not captured by the ray or l-edge count, the assigned functions will either fail to span or become linearly dependent once EEE removes the redundant edges. The manuscript must supply an explicit verification that the extension operator commutes with the dimension decomposition.
- [EEE procedure and final basis proof] After EEE removes the extension edges, the resulting set must still be shown to be linearly independent and complete for the original arbitrary T-mesh. The current argument relies on the diagonalizable case plus a reduction step; a concrete argument (or counter-example check) is needed showing that no new linear relations are introduced by the elimination and that the span is exactly the original space.
minor comments (3)
- [Abstract] The abstract contains a typographical error: 'diagoalizable' should read 'diagonalizable'.
- [Notation and preliminaries] Notation for T l-edges is introduced with inline math ($l$-edges) but is not consistently defined or indexed in the main text; a short notational table or paragraph would improve readability.
- [Comparison section] The comparison with LR B-splines would benefit from a side-by-side table listing mesh restrictions, independence guarantees, and supported T-mesh topologies.
Simulated Author's Rebuttal
We thank the referee for the thorough review and constructive feedback on our manuscript. The comments correctly identify areas where the proofs would benefit from greater explicitness. We address each major comment below and will revise the manuscript to incorporate the requested clarifications and additional arguments.
read point-by-point responses
-
Referee: [edge-extension construction and dimension-formula decomposition] The load-bearing step is the assertion that edge extension leaves the spline-space dimension unchanged and that the dimension formula decomposes cleanly into independent cross-cut, ray, and T l-edge contributions that can each be assigned disjoint local tensor-product B-splines. This claim appears in the construction preceding the proof for the diagonalizable mesh; if any added edge creates an unaccounted multiplicity or new T-junction not captured by the ray or l-edge count, the assigned functions will either fail to span or become linearly dependent once EEE removes the redundant edges. The manuscript must supply an explicit verification that the extension operator commutes with the dimension decomposition.
Authors: We agree that an explicit verification strengthens the argument. The edge-extension procedure in Section 3 is constructed to add edges only in positions that preserve existing T-junction multiplicities and do not create new unaccounted contributions to the dimension formula. We will add a new proposition (with proof) immediately after the extension definition that shows the operator commutes with the decomposition: each added edge is classified according to whether it augments a cross-cut, ray, or T l-edge count, with a case-by-case verification that no extraneous multiplicities arise. This will be included in the revised manuscript. revision: yes
-
Referee: [EEE procedure and final basis proof] After EEE removes the extension edges, the resulting set must still be shown to be linearly independent and complete for the original arbitrary T-mesh. The current argument relies on the diagonalizable case plus a reduction step; a concrete argument (or counter-example check) is needed showing that no new linear relations are introduced by the elimination and that the span is exactly the original space.
Authors: The proof for the diagonalizable case (Theorem 4.1) establishes both linear independence and completeness via the disjoint assignment of local B-splines to the three dimension components. For the EEE reduction, the procedure removes only those extension edges whose associated functions are linear combinations of the retained basis functions, thereby preserving the span. We will expand the argument in Section 5 with an explicit lemma showing that EEE induces no new linear relations (by relating the elimination to the kernel of the evaluation map on the original mesh). We will also add a short computational verification subsection using the provided examples to confirm that the post-EEE functions remain independent and span the original space. revision: yes
Circularity Check
Minor self-citation to dimension formula; central construction and proof remain independent
full rationale
The derivation proceeds by mesh extension to a diagonalizable T-mesh, decomposition via a cited dimension formula into cross-cuts/rays/T l-edges, assignment of standard local tensor-product B-splines to each component, a direct proof that the resulting functions form a basis, and introduction of EEE to recover the original mesh. No step reduces a claimed prediction or basis property to a fitted parameter or to a self-referential definition within the paper itself. The dimension formula is treated as an external input whose validity is presupposed rather than re-derived here; the load-bearing novelty lies in the explicit construction algorithm and the EEE removal step, both of which are verified by direct linear-independence and spanning arguments rather than by construction from the inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The dimension of the spline space over a T-mesh decomposes into independent contributions from cross-cuts, rays, and T l-edges.
invented entities (1)
-
PT-splines
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Lin, NURBS in CAD and Computer Graphics
F. Lin, NURBS in CAD and Computer Graphics. The University of Manchester (United Kingdom), 1996
work page 1996
-
[2]
Mixed CAD method to develop gear surfaces using the relative cutting movements and NURBS surfaces,
F. Tolvaly-Roşca and Z. Forgó, “Mixed CAD method to develop gear surfaces using the relative cutting movements and NURBS surfaces,”Procedia Technology, vol. 19, pp. 20–27, 2015
work page 2015
-
[3]
NURBS-based and parametric-based shape optimization with differentiated CAD kernel,
O. Mykhaskiv, M. Banović, S. Auriemma, P. Mohanamuraly, A. Walther, H. Legrand, and J.- D. Müller, “NURBS-based and parametric-based shape optimization with differentiated CAD kernel,”Computer-Aided Design and Applications, vol. 15, no. 6, pp. 916–926, 2018
work page 2018
-
[4]
NURBS curve and surface fitting for reverse engineering,
W. Ma and J. P. Kruth, “NURBS curve and surface fitting for reverse engineering,”The International Journal of Advanced Manufacturing Technology, vol. 14, pp. 918–927, 1998
work page 1998
-
[5]
Reverse engineering of a NURBS surface from digitized points subject to boundary conditions,
Z. W. Yin, “Reverse engineering of a NURBS surface from digitized points subject to boundary conditions,”Computers & Graphics, vol. 28, no. 2, pp. 207–212, 2004
work page 2004
-
[6]
High-order B-spline approximation for solving time-dependent timoshenko vibrating equations,
A. B. Abdellah, S. Belkouz, and M. Addam, “High-order B-spline approximation for solving time-dependent timoshenko vibrating equations,”Wave Motion, p. 103518, 2025
work page 2025
-
[7]
Representation of 3D environment map using B- splinesurfacewithtwomutuallyperpendicularLRFs,
R. J. Yan, J. Wu, J. Y. Lee, and C. S. Han, “Representation of 3D environment map using B- splinesurfacewithtwomutuallyperpendicularLRFs,” Mathematical Problems in Engineering, vol. 2015, no. 1, p. 690310, 2015
work page 2015
-
[8]
K. L. Wu, T. J. Ho, S. A. Huang, K. H. Lin, Y. C. Lin, and J. S. Liu, “Path planning and replanning for mobile robot navigation on 3D terrain: An approach based on geodesic,” Mathematical Problems in Engineering, vol. 2016, no. 1, p. 2539761, 2016
work page 2016
-
[9]
Reconstruction for gated dynamic cardiac pet imaging using a tensor product spline basis,
J. Verhaeghe, Y. D’Asseler, S. Staelens, S. Vandenberghe, and I. Lemahieu, “Reconstruction for gated dynamic cardiac pet imaging using a tensor product spline basis,”IEEE Transactions on Nuclear Science, vol. 54, no. 1, pp. 80–91, 2007
work page 2007
-
[10]
Parametric shape representation by a deformable NURBS model for cardiac functional measurements,
S. Chen and Q. Guan, “Parametric shape representation by a deformable NURBS model for cardiac functional measurements,”IEEE Transactions on Biomedical Engineering, vol. 58, no. 3, pp. 480–487, 2010
work page 2010
-
[11]
I. J. Schoenberg, “Contributions to the problem of approximation of equidistant data by analytic functions. part b. on the problem of osculatory interpolation. a second class of analytic approximation formulae,”Quarterly of Applied Mathematics, vol. 4, no. 2, pp. 112–141, 1946. REFERENCES 24
work page 1946
-
[12]
Multivariable curve interpolation,
J. Ferguson, “Multivariable curve interpolation,”Journal of the ACM (JACM), vol. 11, no. 2, pp. 221–228, 1964
work page 1964
-
[13]
C. De Boor and C. De Boor,A practical guide to splines. springer New York, 1978, vol. 27
work page 1978
-
[14]
T. W. Sederberg, J. Zheng, A. Bakenov, and A. Nasri, “T-splines and T-nurccs,”ACM trans- actions on graphics (TOG), vol. 22, no. 3, pp. 477–484, 2003
work page 2003
-
[15]
Polynomial splines over locally refined box- partitions,
T. Dokken, T. Lyche, and K. F. Pettersen, “Polynomial splines over locally refined box- partitions,”Computer Aided Geometric Design, vol. 30, no. 3, pp. 331–356, 2013
work page 2013
-
[16]
Polynomial splines over hierarchical T-meshes,
J. Deng, F. Chen, X. Li, C. Hu, W. Tong, Z. Yang, and Y. Feng, “Polynomial splines over hierarchical T-meshes,”Graphical models, vol. 70, no. 4, pp. 76–86, 2008
work page 2008
-
[17]
Hierarchical B-spline refinement,
D. R. Forsey and R. H. Bartels, “Hierarchical B-spline refinement,” inProceedings of the 15th annual conference on Computer graphics and interactive techniques, 1988, pp. 205–212
work page 1988
-
[18]
THB-splines: The truncated basis for hierarchical splines,
C. Giannelli, B. Jüttler, and H. Speleers, “THB-splines: The truncated basis for hierarchical splines,”Computer Aided Geometric Design, vol. 29, no. 7, pp. 485–498, 2012
work page 2012
-
[19]
T-spline simplification and local refinement,
T. W. Sederberg, D. L. Cardon, G. T. Finnigan, N. S. North, J. Zheng, and T. Lyche, “T-spline simplification and local refinement,”ACM transactions on graphics (TOG), vol. 23, no. 3, pp. 276–283, 2004
work page 2004
-
[20]
T. W. Sederberg, G. T. Finnigan, X. Li, H. Lin, and H. Ipson, “Watertight trimmed NURBS,” ACM Transactions on Graphics (TOG), vol. 27, no. 3, pp. 1–8, 2008
work page 2008
-
[21]
Isogeometric analysis: approximation, stability and error estimates for h-refined meshes,
Y. Bazilevs, L. Beirao da Veiga, J. A. Cottrell, T. J. Hughes, and G. Sangalli, “Isogeometric analysis: approximation, stability and error estimates for h-refined meshes,”Mathematical Models and Methods in Applied Sciences, vol. 16, no. 07, pp. 1031–1090, 2006
work page 2006
-
[22]
Isogeometric analysis using T-splines,
Y. Bazilevs, V. M. Calo, J. A. Cottrell, J. A. Evans, T. J. R. Hughes, S. Lipton, M. A. Scott, and T. W. Sederberg, “Isogeometric analysis using T-splines,”Computer methods in applied mechanics and engineering, vol. 199, no. 5-8, pp. 229–263, 2010
work page 2010
-
[23]
Adaptive isogeometric analysis by local h-refinement with T-splines,
M. R. Dörfel, B. Jüttler, and B. Simeon, “Adaptive isogeometric analysis by local h-refinement with T-splines,”Computer methods in applied mechanics and engineering, vol. 199, no. 5-8, pp. 264–275, 2010
work page 2010
-
[24]
Isogeometric finite element data structures based on bézier extraction of T-splines,
M. A. Scott, M. J. Borden, C. V. Verhoosel, T. W. Sederberg, and T. J. Hughes, “Isogeometric finite element data structures based on bézier extraction of T-splines,”International Journal for Numerical Methods in Engineering, vol. 88, no. 2, pp. 126–156, 2011
work page 2011
-
[25]
Linear independence of the T-spline blending functions associated with some particular T-meshes,
A. Buffa, D. Cho, and G. Sangalli, “Linear independence of the T-spline blending functions associated with some particular T-meshes,”Computer Methods in Applied Mechanics and Engineering, vol. 199, no. 23-24, pp. 1437–1445, 2010
work page 2010
-
[26]
On linear independence of T-spline blending functions,
X. Li, J. Zheng, T. W. Sederberg, T. J. Hughes, and M. A. Scott, “On linear independence of T-spline blending functions,”Computer Aided Geometric Design, vol. 29, no. 1, pp. 63–76, 2012
work page 2012
-
[27]
Local refinement of analysis-suitable T-splines,
M. A. Scott, X. Li, T. W. Sederberg, and T. J. Hughes, “Local refinement of analysis-suitable T-splines,”Computer Methods in Applied Mechanics and Engineering, vol. 213, pp. 206–222, 2012
work page 2012
-
[28]
Analysis-suitable T-splines: Characterization, refineability, and ap- proximation,
X. Li and M. A. Scott, “Analysis-suitable T-splines: Characterization, refineability, and ap- proximation,”Mathematical Models and Methods in Applied Sciences, vol. 24, no. 06, pp. 1141–1164, 2014
work page 2014
-
[29]
Surface modeling with polynomial splines over hierarchical T-meshes,
X. Li, J. Deng, and F. Chen, “Surface modeling with polynomial splines over hierarchical T-meshes,”The Visual Computer, vol. 23, pp. 1027–1033, 2007. REFERENCES 25
work page 2007
-
[30]
N. Nguyen-Thanh, H. Nguyen-Xuan, S. P. A. Bordas, and T. Rabczuk, “Isogeometric anal- ysis using polynomial splines over hierarchical T-meshes for two-dimensional elastic solids,” Computer Methods in Applied Mechanics and Engineering, vol. 200, no. 21-22, pp. 1892–1908, 2011
work page 1908
-
[31]
Adaptive isogeometric analysis using rational PHT- splines,
P. Wang, J. Xu, J. Deng, and F. Chen, “Adaptive isogeometric analysis using rational PHT- splines,”Computer-Aided Design, vol. 43, no. 11, pp. 1438–1448, 2011
work page 2011
-
[32]
On the completeness of hierarchical tensor-product B-splines,
D. Mokriš, B. Jüttler, and C. Giannelli, “On the completeness of hierarchical tensor-product B-splines,”Journal of Computational and Applied Mathematics, vol. 271, pp. 53–70, 2014
work page 2014
-
[33]
Dimensions of spline spaces over T-meshes,
J. Deng, F. Chen, and Y. Feng, “Dimensions of spline spaces over T-meshes,”Journal of Computational and Applied Mathematics, vol. 194, no. 2, pp. 267–283, 2006
work page 2006
-
[34]
The structural characterization and interpolation for multivariate splines,
R. H. Wang, “The structural characterization and interpolation for multivariate splines,”Acta Math. Sinica, vol. 18, no. 2, pp. 91–106, 1975
work page 1975
-
[35]
Multivariate spline functions and their applications,
R. Wang, “Multivariate spline functions and their applications,”Mathematics and Its Appli- cations, vol. 529, 2001
work page 2001
-
[36]
On the dimension of spline spaces on planar T-meshes,
B. Mourrain, “On the dimension of spline spaces on planar T-meshes,”Mathematics of Com- putation, vol. 83, no. 286, pp. 847–871, 2014
work page 2014
-
[37]
New proof of dimension formula of spline spaces over T-meshes via smoothing cofactors,
Z. Huang, J. Deng, Y. Feng, and F. Chen, “New proof of dimension formula of spline spaces over T-meshes via smoothing cofactors,”Journal of Computational Mathematics, pp. 501–514, 2006
work page 2006
-
[38]
On the instability in the dimension of splines spaces over T-meshes,
X. Li and F. Chen, “On the instability in the dimension of splines spaces over T-meshes,” Computer Aided Geometric Design, vol. 28, no. 7, pp. 420–426, 2011
work page 2011
-
[39]
On the problem of instability in the dimensions of spline spaces over T-meshes with T-cycles,
Q. Guo, R. Wang, and C. Li, “On the problem of instability in the dimensions of spline spaces over T-meshes with T-cycles,”Journal of Computational Mathematics, pp. 248–262, 2015
work page 2015
-
[40]
On the stability of the dimensions of spline spaces with highest order of smoothness over T-meshes,
B. Huang and F. Chen, “On the stability of the dimensions of spline spaces with highest order of smoothness over T-meshes,”Journal of Computational and Applied Mathematics, vol. 441, p. 115681, 2024
work page 2024
-
[41]
On the dimension of spline spaces over T-meshes with smoothing cofactor- conformality method,
X. Li and J. Deng, “On the dimension of spline spaces over T-meshes with smoothing cofactor- conformality method,”Computer Aided Geometric Design, vol. 41, pp. 76–86, 2016
work page 2016
-
[42]
B. Huang and F. Chen, “A preliminary study on the dimensional stability classification of polynomial spline spaces over T-meshes,” Submitted to arXiv, under review, 2025, arXiv submission ID: submit/6692402
-
[43]
Some properties of LR-splines,
A. Bressan, “Some properties of LR-splines,”Computer Aided Geometric Design, vol. 30, no. 8, pp. 778–794, 2013
work page 2013
-
[44]
Adaptive refinement with locally linearly in- dependent LR B-splines: Theory and applications,
F. Patrizi, C. Manni, F. Pelosi, and H. Speleers, “Adaptive refinement with locally linearly in- dependent LR B-splines: Theory and applications,”Computer Methods in Applied Mechanics and Engineering, vol. 369, p. 113230, 2020
work page 2020
-
[45]
Linear dependence of bivariate minimal support and locally refined B-splines over LR-meshes,
F. Patrizi and T. Dokken, “Linear dependence of bivariate minimal support and locally refined B-splines over LR-meshes,”Computer aided geometric design, vol. 77, p. 101803, 2020
work page 2020
-
[46]
A hierarchical approach to adap- tive local refinement in isogeometric analysis,
A. V. Vuong, C. Giannelli, B. Jüttler, and B. Simeon, “A hierarchical approach to adap- tive local refinement in isogeometric analysis,”Computer Methods in Applied Mechanics and Engineering, vol. 200, no. 49-52, pp. 3554–3567, 2011
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.