LAWNs Meet SWIPT: Beamforming and Power Splitting Optimization for Predictive Control
Pith reviewed 2026-06-26 09:43 UTC · model grok-4.3
The pith
A two-stage MPC and SDR-SCA framework jointly optimizes control inputs, beamforming vectors, and power splitting ratios for SWIPT-enabled LAWNs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By constructing collision-free reference trajectories via stream functions and then solving a joint non-convex optimization of MPC control inputs, transmit beamforming vectors, and power-splitting ratios with a two-stage framework that applies SDR (proven tight) followed by SCA, the system enables a multi-antenna base station to guide multiple UASs along safe paths while simultaneously transferring information and energy.
What carries the argument
Two-stage optimization framework: MPC generates predictive control inputs; SDR-SCA iteration then optimizes beamforming vectors and power-splitting ratios, with a proof that the SDR relaxation is tight.
If this is right
- UAS fleets can maintain accurate trajectory tracking while harvesting sufficient energy to extend flight time.
- The same base station can simultaneously serve multiple UASs without separate power or control channels.
- Real-time implementation becomes feasible because the SDR tightness removes the need for randomization or further approximation.
- The approach directly supports battery-limited operation in low-altitude networks that must avoid dynamic no-fly zones.
Where Pith is reading between the lines
- The same joint-control-plus-energy formulation could be applied to other wireless-controlled mobile platforms such as ground robots or surface vehicles.
- Because the SDR step is proven tight, the computational cost scales mainly with the number of antennas and power-splitting variables rather than with combinatorial search.
- Extending the stream-function construction to three-dimensional NFZs would be a direct next step for urban air-mobility scenarios.
Load-bearing premise
The non-convex joint optimization admits a tight SDR solution and the stream-function trajectories stay collision-free under the real-time wireless constraints and mobile NFZs.
What would settle it
A simulation or hardware test in which the SDR relaxation gap is nonzero or in which tracking error and harvested energy fail to exceed the benchmark schemes when mobile NFZs are present.
Figures
read the original abstract
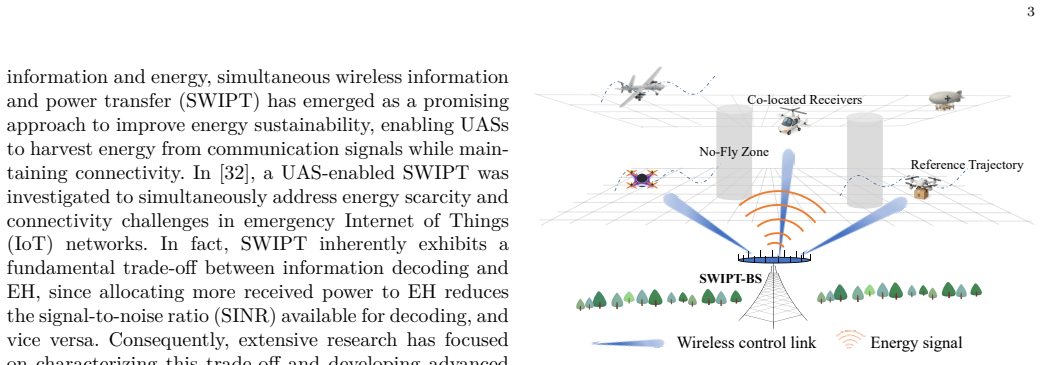
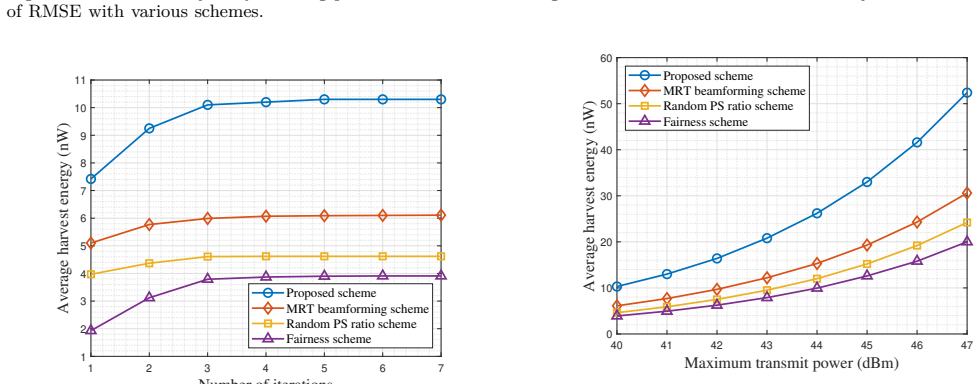
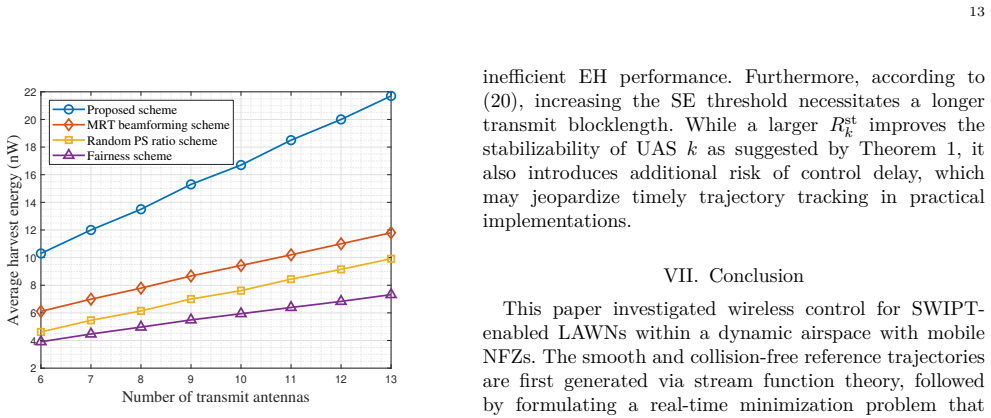
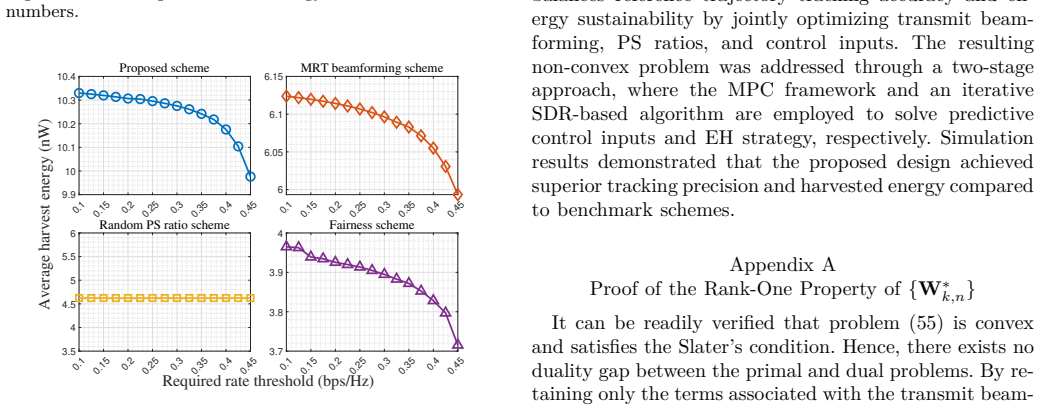
Simultaneous wireless information and power transfer (SWIPT) has emerged as a promising paradigm for enabling sustainable connectivity in battery-limited low-altitude wireless networks (LAWNs). This paper investigates a SWIPT-enabled LAWN system in which a multi-antenna base station (BS) simultaneously delivers control information and wireless energy to a fleet of uncrewed aircraft systems (UASs) via power splitting. In particular, the BS remotely guides the UASs to accurately track predefined reference trajectories toward their destinations while avoiding multiple mobile no-fly zones (NFZs). To guarantee collision-free path planning, we first construct smooth and safe reference trajectories using stream function theory. Then, a real-time optimization problem is formulated, which jointly takes into account the wireless control cost and energy sustainability by optimizing control inputs, transmit beamforming vectors, and the power splitting ratios. To address the resultant non-convex problem, a two-stage optimization framework is proposed. First, we develop a model predictive control (MPC)-based method to generate predictive control inputs. Subsequently, we derive a computationally efficient iterative algorithm to optimize the beamforming vectors and power splitting ratios by applying semidefinite relaxation (SDR) and successive convex approximation (SCA) techniques. We further prove that the SDR is tight for our formulation. Extensive numerical results demonstrate that our proposed design significantly outperforms benchmark schemes in terms of tracking accuracy and harvested energy, thereby validating its effectiveness for sustainable implementation in LAWN systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a SWIPT-enabled LAWN system in which a multi-antenna BS delivers both control signals and energy to a fleet of UASs via power splitting. Safe reference trajectories are constructed via stream function theory to avoid mobile NFZs. A joint optimization problem is formulated over control inputs, beamforming vectors, and power splitting ratios to balance tracking performance and harvested energy. The non-convex problem is solved via a two-stage framework: MPC generates predictive control inputs, after which SDR combined with SCA optimizes the wireless variables; SDR tightness is proved for the formulation. Numerical results are claimed to show substantial gains over benchmarks in tracking accuracy and energy harvesting.
Significance. If the two-stage procedure can be shown to produce feasible and near-optimal solutions to the original joint problem, the work would provide a practical route to sustainable wireless control of mobile UAS fleets. The combination of stream-function trajectory planning with SDR-tight beamforming/PS optimization is technically interesting and directly relevant to energy-constrained aerial networks. The explicit proof of SDR tightness is a positive feature that strengthens the algorithmic contribution.
major comments (2)
- [Abstract] Abstract (paragraph on the real-time optimization problem and two-stage framework): The manuscript states that the problem 'jointly' optimizes control inputs, beamforming vectors, and power splitting ratios, yet the proposed method first fixes control inputs via MPC (under ideal delivery) and only then optimizes the wireless variables. This separation means the chosen inputs may violate the original joint constraints once actual received control signals (affected by the realized PS ratios and beamforming) are considered, especially under mobile NFZs; the claimed performance therefore rests on an unverified assumption that the decoupled solution remains feasible.
- [Abstract] Abstract (SDR tightness claim): The statement that 'we further prove that the SDR is tight for our formulation' applies only to the second-stage problem with fixed control inputs. No argument is given that the overall two-stage procedure solves (or approximates) the original joint non-convex program, nor that the fixed MPC inputs remain admissible after the wireless stage; this gap directly undermines the central claim of joint optimization.
minor comments (1)
- The abstract refers to 'extensive numerical results' without indicating the number of Monte-Carlo runs, the range of NFZ velocities, or whether confidence intervals are reported; adding these details would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable comments. We provide point-by-point responses to the major comments and indicate the revisions we will make to address the concerns.
read point-by-point responses
-
Referee: [Abstract] Abstract (paragraph on the real-time optimization problem and two-stage framework): The manuscript states that the problem 'jointly' optimizes control inputs, beamforming vectors, and power splitting ratios, yet the proposed method first fixes control inputs via MPC (under ideal delivery) and only then optimizes the wireless variables. This separation means the chosen inputs may violate the original joint constraints once actual received control signals (affected by the realized PS ratios and beamforming) are considered, especially under mobile NFZs; the claimed performance therefore rests on an unverified assumption that the decoupled solution remains feasible.
Authors: We agree with the referee that the two-stage framework decouples the optimization, with MPC generating control inputs under the assumption of ideal signal delivery. This approach does not inherently guarantee that the resulting solution satisfies the original joint constraints when accounting for the actual received signals influenced by beamforming and power splitting, especially in the presence of mobile NFZs. The performance claims are based on the proposed decoupled method rather than a verified joint solution. To address this, we will revise the abstract to more accurately describe the sequential nature of the optimization without implying a fully joint solution. We will also add a discussion section on the feasibility considerations of the two-stage approach. revision: yes
-
Referee: [Abstract] Abstract (SDR tightness claim): The statement that 'we further prove that the SDR is tight for our formulation' applies only to the second-stage problem with fixed control inputs. No argument is given that the overall two-stage procedure solves (or approximates) the original joint non-convex program, nor that the fixed MPC inputs remain admissible after the wireless stage; this gap directly undermines the central claim of joint optimization.
Authors: The SDR tightness is proved specifically for the second-stage wireless optimization problem with fixed control inputs. We do not claim or prove that the two-stage procedure solves the original joint non-convex program or that the MPC inputs remain admissible post-optimization. This is a limitation of the current approach. We will revise the abstract to clarify that the SDR tightness applies to the beamforming and power splitting optimization subproblem. Furthermore, we will update the text to avoid overstating the joint optimization aspect and include remarks on the approximation nature of the method. revision: yes
Circularity Check
Derivation chain is self-contained with independent optimization stages
full rationale
The paper formulates a joint optimization over control inputs, beamforming vectors and power splitting ratios, addressed by a two-stage framework consisting of MPC to generate predictive control inputs followed by SDR+SCA for the wireless variables, plus an explicit proof that SDR is tight. No load-bearing step reduces by construction to a fitted input, self-definition, or self-citation chain; stream-function trajectory construction and the MPC stage rely on external methods, while the numerical validation compares against independent benchmarks. The derivation therefore remains non-circular.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Low-altitude wireless networks: A comprehensive survey,
J. Wu et al., “Low-altitude wireless networks: A comprehensive survey,” China Communications, vol. 23, no. 3, pp. 99–141, 2026
2026
-
[2]
W. Yuan, Y. Cui, J. Wang, F. Liu, G. Sun, T. Xiang, J. Xu, S. Jin, D. Niyato, S. Coleri, et al., “From ground to sky: Architectures, applications, and challenges shaping low-altitude wireless networks,” arXiv preprint arXiv:2506.12308, 2025
Pith/arXiv arXiv 2025
-
[3]
Ubiquitous UA V communi- cation enabled low-altitude economy: Applications, techniques, and 3GPP’s efforts,
D. He, W. Yuan, J. Wu, and R. Liu, “Ubiquitous UA V communi- cation enabled low-altitude economy: Applications, techniques, and 3GPP’s efforts,” IEEE Netw., pp. 1–1, 2025
2025
-
[4]
Toward multi-functional LA WNs with ISAC: Opportunities, challenges, and the road ahead,
J. Wu, W. Yuan, X. Zhang, Y. Yu, Y. Cui, F. Liu, G. Sun, J. Wang, D. Niyato, and D. I. Kim, “Toward multi-functional LA WNs with ISAC: Opportunities, challenges, and the road ahead,” IEEE Wireless Commun., pp. 1–8, 2026
2026
-
[5]
Trajectory-driven beamforming optimization: A unified framework for mobile ISAC agents,
W. Hou, X. Zhu, Z. Wei, Z. Dong, J. Cao, Y. Jiang, and V. K. N. Lau, “Trajectory-driven beamforming optimization: A unified framework for mobile ISAC agents,” IEEE Trans. Netw. Sci. Eng., pp. 1–16, 2025
2025
-
[6]
Random ISAC signals deserve dedicated precoding,
S. Lu, F. Liu, F. Dong, Y. Xiong, J. Xu, Y.-F. Liu, and S. Jin, “Random ISAC signals deserve dedicated precoding,” IEEE Trans. Signal Process., vol. 72, pp. 3453–3469, 2024
2024
-
[7]
When UA Vs meet ISAC: Real- time trajectory design for secure communications,
J. Wu, W. Yuan, and L. Hanzo, “When UA Vs meet ISAC: Real- time trajectory design for secure communications,” IEEE Trans. Veh. Technol., vol. 72, no. 12, pp. 16766–16771, Dec. 2023
2023
-
[8]
UA V- enabled wireless networks with movable-antenna array: Flexible beamforming and trajectory design,
W. Liu, X. Zhang, H. Xing, J. Ren, Y. Shen, and S. Cui, “UA V- enabled wireless networks with movable-antenna array: Flexible beamforming and trajectory design,” IEEE Wireless Commun. Lett., vol. 14, no. 3, pp. 566–570, Mar. 2025
2025
-
[9]
Joint trajectory and resource allocation design for energy-efficient secure UA V communication systems,
Y. Cai, Z. Wei, R. Li, and J. Ng, Derrick Wing Kwan CA- Iand Yuan, “Joint trajectory and resource allocation design for energy-efficient secure UA V communication systems,” IEEE Trans. Commun., vol. 68, no. 7, pp. 4536–4553, Jul. 2020
2020
-
[10]
Air traffic management: Evolution with technology,
S. Kahne and I. Frolow, “Air traffic management: Evolution with technology,” IEEE Control Syst. Mag., vol. 16, no. 4, pp. 12–21, Aug. 2002
2002
-
[11]
Multiuser miso UA V communications in uncertain environments with no-fly zones: Robust trajectory and resource allocation design,
D. Xu, Y. Sun, D. W. K. Ng, and R. Schober, “Multiuser miso UA V communications in uncertain environments with no-fly zones: Robust trajectory and resource allocation design,” IEEE Trans. Commun., vol. 68, no. 5, pp. 3153–3172, May 2020
2020
-
[12]
Joint optimization of UA V trajec- tory and communication resources with complete avoidance of no-fly-zones,
K. Heo, G. Park, and K. Lee, “Joint optimization of UA V trajec- tory and communication resources with complete avoidance of no-fly-zones,” IEEE Trans. Intell. Transp. Syst., vol. 25, no. 10, pp. 14259–14265, Oct. 2024
2024
-
[13]
Low-complexity path planning algorithm for unmanned aerial vehicles in complicated scenarios,
Z. Xiao, B. Zhu, Y. Wang, and P. Miao, “Low-complexity path planning algorithm for unmanned aerial vehicles in complicated scenarios,” IEEE Access, vol. 6, pp. 57049–57055, Oct. 2018
2018
-
[14]
Vehicle motion planning using stream functions,
S. Waydo and R. Murray, “Vehicle motion planning using stream functions,” in 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), vol. 2, pp. 2484–2491 vol.2, 2003
2003
-
[15]
H. Jin, W. Yuan, J. Wu, J. Wang, D. Niyato, X. Wang, G. K. Karagiannidis, Z. Lin, Y. Gong, D. I. Kim, et al., “Advancing the control of low-altitude wireless networks: Archi- tecture, design principles, and future directions,” arXiv preprint arXiv:2508.07967, 2025
arXiv 2025
-
[16]
Efficient collision avoidance for autonomous vehicles in polygonal domains,
J. Fan, N. Murgovski, and J. Liang, “Efficient collision avoidance for autonomous vehicles in polygonal domains,” IEEE Trans. Transport. Elec., vol. 11, no. 2, pp. 5396–5406, 2025
2025
-
[17]
Safeguarding inter- satellite transmissions: A viewpoint from covertness,
S. Wang, J. Ye, C. Chen, G. Pan, and J. An, “Safeguarding inter- satellite transmissions: A viewpoint from covertness,” IEEE Wireless Commun., vol. 32, pp. 221–228, Jan. 2025
2025
-
[18]
Gaussmask-dsss: Enhancing covert spread spectrum communication with gaussian cloaking and deep learning- aided synchronization,
S. Wang, Z. Song, Z. Hua, X. Yang, C. Du, R. Zhang, and G. Pan, “Gaussmask-dsss: Enhancing covert spread spectrum communication with gaussian cloaking and deep learning- aided synchronization,” IEEE J. Sel. Areas Commun., vol. 44, pp. 1495–1511, 2026
2026
-
[19]
LLM- aided spectrum-sharing LEO satellite communications,
Z. Ni, Z. Hua, X. Yang, R. Zhang, S. Wang, and G. Pan, “LLM- aided spectrum-sharing LEO satellite communications,” IEEE J. Sel. Areas Commun., vol. 44, pp. 2591–2605, 2026
2026
-
[20]
Path tracking control for autonomous vehicles based on an improved MPC,
H. Wang, B. Liu, X. Ping, and Q. An, “Path tracking control for autonomous vehicles based on an improved MPC,” IEEE access, vol. 7, pp. 161064–161073, 2019
2019
-
[21]
Generative ai empowered covert communications: Autonomy, efficiency, and suitability,
S. Wang, X. Zhang, Z. Song, Z. Hua, J. Song, J. Wang, G. Pan, and D. Niyato, “Generative ai empowered covert communications: Autonomy, efficiency, and suitability,” IEEE Wireless Commun., pp. 1–9, 2025
2025
-
[22]
Real-time op- timal trajectory planning for autonomous driving with collision avoidance using convex optimization,
G. Li, X. Zhang, H. Guo, B. Lenzo, and N. Guo, “Real-time op- timal trajectory planning for autonomous driving with collision avoidance using convex optimization,” Automot. Innov., vol. 6, no. 3, pp. 481–491, 2023
2023
-
[23]
Joint information-theoretic secrecy and covertness for UA V-assisted wireless transmission with finite blocklength,
P. Liu, Z. Li, J. Si, N. Al-Dhahir, and Y. Gao, “Joint information-theoretic secrecy and covertness for UA V-assisted wireless transmission with finite blocklength,” IEEE Trans. Veh. Technol., vol. 72, no. 8, pp. 10187–10199, Aug. 2023
2023
-
[24]
UA V- relayed finite-blocklength covert communication with channel estimation,
L. Jiao, X. Chen, L. Xu, N. Deng, N. Zhao, and X. Wang, “UA V- relayed finite-blocklength covert communication with channel estimation,” IEEE Trans. Veh. Technol., vol. 73, no. 6, pp. 9032– 9037, Jun. 2024
2024
-
[25]
Predictive control over low- altitude wireless networks: Joint trajectory design and resource allocation,
H. Jin, J. Wu, W. Yuan, R. Ruan, J. Wang, D. Niyato, D. I. Kim, and A. Jamalipour, “Predictive control over low- altitude wireless networks: Joint trajectory design and resource allocation,” IEEE Trans. Mobile Comput., pp. 1–13, 2026
2026
-
[26]
Toward dual-functional LA WN: Control-aware system design for aerodynamics-aided 15 UA V formations,
J. Wu, W. Yuan, Q. Cheng, and H. Jin, “Toward dual-functional LA WN: Control-aware system design for aerodynamics-aided 15 UA V formations,” IEEE J. Sel. Areas Commun., vol. 44, pp. 791–804, 2025
2025
-
[27]
3D trajectory optimization for energy-efficient UA V communication: A control design perspective,
B. Li, Q. Li, Y. Zeng, Y. Rong, and R. Zhang, “3D trajectory optimization for energy-efficient UA V communication: A control design perspective,” IEEE Trans. Wireless Commun., vol. 21, no. 6, pp. 4579–4593, Jun. 2021
2021
-
[28]
Energy efficient UA V-enabled mobile edge computing for IoT devices: A review,
M. Abrar, U. Ajmal, Z. M. Almohaimeed, X. Gui, R. Akram, and R. Masroor, “Energy efficient UA V-enabled mobile edge computing for IoT devices: A review,” IEEE Access, vol. 9, pp. 127779–127798, 2021
2021
-
[29]
Resource allocation for simultaneous wireless information and power transfer systems: A tutorial overview,
Z. Wei, X. Yu, D. W. K. Ng, and R. Schober, “Resource allocation for simultaneous wireless information and power transfer systems: A tutorial overview,” Proc. IEEE, vol. 110, no. 1, pp. 127–149, Jan. 2021
2021
-
[30]
Performance analysis and optimization for SWIPT wireless sensor networks,
G. Pan, H. Lei, Y. Yuan, and Z. Ding, “Performance analysis and optimization for SWIPT wireless sensor networks,” IEEE Trans. Commun., vol. 65, no. 5, pp. 2291–2302, May 2017
2017
-
[31]
On secrecy performance of MISO SWIPT systems with TAS and imperfect CSI,
G. Pan, H. Lei, Y. Deng, L. Fan, J. Yang, Y. Chen, and Z. Ding, “On secrecy performance of MISO SWIPT systems with TAS and imperfect CSI,” IEEE Trans. Commun., vol. 64, no. 9, pp. 3831–3843, Sept. 2016
2016
-
[32]
UA V-enabled SWIPT in IoT networks for emergency communications,
W. Feng, J. Tang, Y. Yu, J. Song, N. Zhao, G. Chen, K.- K. Wong, and J. Chambers, “UA V-enabled SWIPT in IoT networks for emergency communications,” IEEE Wireless Com- mun., vol. 27, no. 5, pp. 140–147, Oct. 2020
2020
-
[33]
Control under communication con- straints,
S. Tatikonda and S. Mitter, “Control under communication con- straints,” IEEE Trans. Auto. Control, vol. 49, no. 7, pp. 1056– 1068, Jul. 2004
2004
-
[34]
Control over noisy channels,
S. Tatikonda and S. Mitter, “Control over noisy channels,” IEEE Trans. Auto. Control, vol. 49, no. 7, pp. 1196–1201, Jul. 2004
2004
-
[35]
Physics-based freely scalable continuum deformation for UAS traffic coordination,
H. Rastgoftar and E. Atkins, “Physics-based freely scalable continuum deformation for UAS traffic coordination,” IEEE Trans. Control Net. Syst., vol. 7, no. 2, pp. 532–544, Jun. 2019
2019
-
[36]
A guidance and maneuvering control system design with anti-collision using stream functions with vortex flows for autonomous marine vessels,
H. Zhou, Z. Ren, M. Marley, and R. Skjetne, “A guidance and maneuvering control system design with anti-collision using stream functions with vortex flows for autonomous marine vessels,” IEEE Trans. Control Syst. Techno., vol. 30, no. 6, pp. 2630–2645, Nov. 2022
2022
-
[37]
Stream function-based navigation for complex quadcopter obstacle avoidance,
S. Smith, E. Witrant, and Y.-J. Pan, “Stream function-based navigation for complex quadcopter obstacle avoidance,” arXiv preprint arXiv:2507.06787, 2025
arXiv 2025
-
[38]
Using stream func- tions for complex behavior and path generation,
J. Sullivan, S. Waydo, and M. Campbell, “Using stream func- tions for complex behavior and path generation,” in AIAA Guidance, Navigation, and Control Conference and Exhibit, p. 5800, 2003
2003
-
[39]
Fractional programming for communica- tion systems—part i: Power control and beamforming,
K. Shen and W. Yu, “Fractional programming for communica- tion systems—part i: Power control and beamforming,” IEEE Trans. Signal Process., vol. 66, no. 10, pp. 2616–2630, May 2018
2018
-
[40]
Secure radar-communication systems with mali- cious targets: Integrating radar, communications and jamming functionalities,
N. Su et al., “Secure radar-communication systems with mali- cious targets: Integrating radar, communications and jamming functionalities,” IEEE Trans. Wireless Commun., vol. 20, no. 1, pp. 83–95, 2021
2021
-
[41]
Cvx: Matlab software for disciplined convex programming,
M. Grant, S. Boyd, and Y. Ye, “Cvx: Matlab software for disciplined convex programming,” 2008
2008
-
[42]
Majorization- minimization algorithms in signal processing, communications, and machine learning,
Y. Sun, P. Babu, and D. P. Palomar, “Majorization- minimization algorithms in signal processing, communications, and machine learning,” IEEE Trans. Signal Process., vol. 65, no. 3, pp. 794–816, Feb. 2017
2017
-
[43]
Semidefinite relaxation of quadratic optimization problems,
Z. Luo, W. Ma, A. M.-c. So, Y. Ye, and S. Zhang, “Semidefinite relaxation of quadratic optimization problems,” IEEE Signal Process. Mag., vol. 27, no. 3, pp. 20–34, May 2010
2010
-
[44]
Remote UGV control via practical wireless channels: A model predictive control approach,
J. Cao, S. Khan, W. Liu, Y. Li, and B. Vucetic, “Remote UGV control via practical wireless channels: A model predictive control approach,” IEEE Trans. Intell. Veh., pp. 1–13, Oct. 2024. Jun Wu (Graduate Student Member, IEEE) received the B.E. degree in the School of Elec- tronic Engineering from Southwest Jiaotong University, China, in 2021. He is current...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.