Belt-Finger: An Affordable Soft Belt-Driven Gripper for Dexterous In-Hand Manipulation
Pith reviewed 2026-06-26 17:09 UTC · model grok-4.3
The pith
A double-soft-belt finger module adds three in-hand degrees of freedom to parallel grippers while keeping them simple and cheap.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
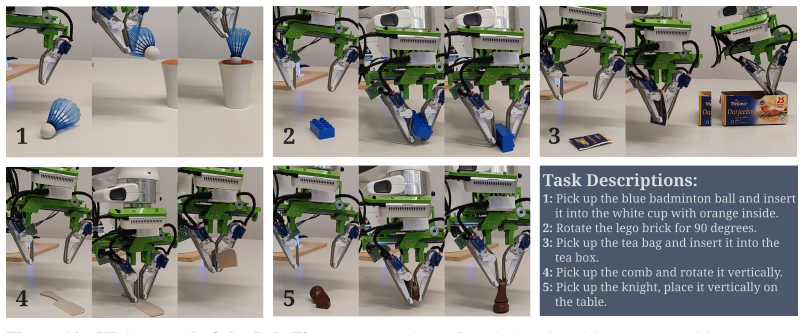
The paper claims that replacing or upgrading parallel gripper fingers with a double-soft-belt mechanism allows for in-hand translation, pitch, and roll while maintaining the original gripper's simplicity and precision. This is achieved through a deliberately simple design suited for inexpensive manufacturing. The added capabilities are shown to enhance dexterity in tasks using model predictive control, teleoperation, and trained policies, making previously difficult manipulations feasible without changing the arm or adding complexity.
What carries the argument
double-soft-belt-based finger module that adds translation, pitch, and roll to the standard parallel gripper motion
If this is right
- The gripper enables manipulation in confined spaces by reducing reliance on arm motion.
- It integrates with existing control methods like MPC for known objects.
- Teleoperation becomes more effective with simultaneous arm and gripper control.
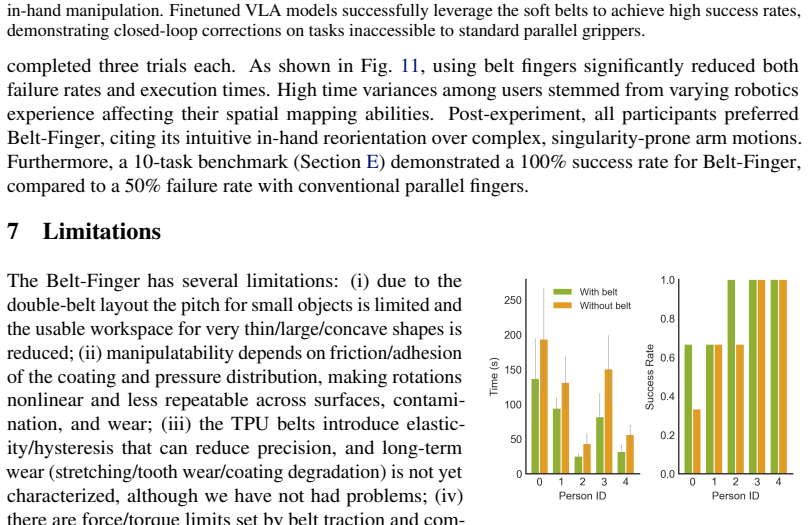
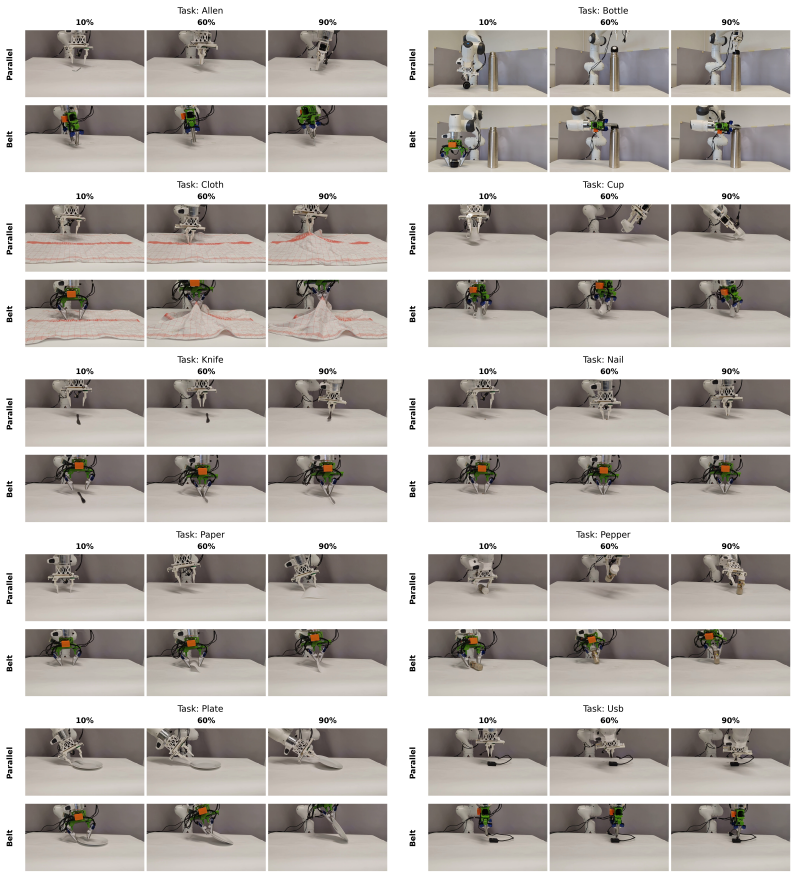
- Task success rates increase compared to conventional grippers across various control strategies.
Where Pith is reading between the lines
- This approach might allow smaller robots to perform tasks that currently require larger workspaces.
- Researchers could adapt the belt design for other end-effectors to add degrees of freedom affordably.
- The low cost could make advanced manipulation accessible to more educational and hobbyist setups.
Load-bearing premise
The belt mechanism can be manufactured inexpensively and integrated while preserving the reliability and precise control of traditional parallel grippers.
What would settle it
A direct comparison experiment showing that the belt-finger gripper fails to complete any of the manipulation tasks that the conventional gripper can perform, or exhibits frequent mechanical failures during use.
Figures
read the original abstract
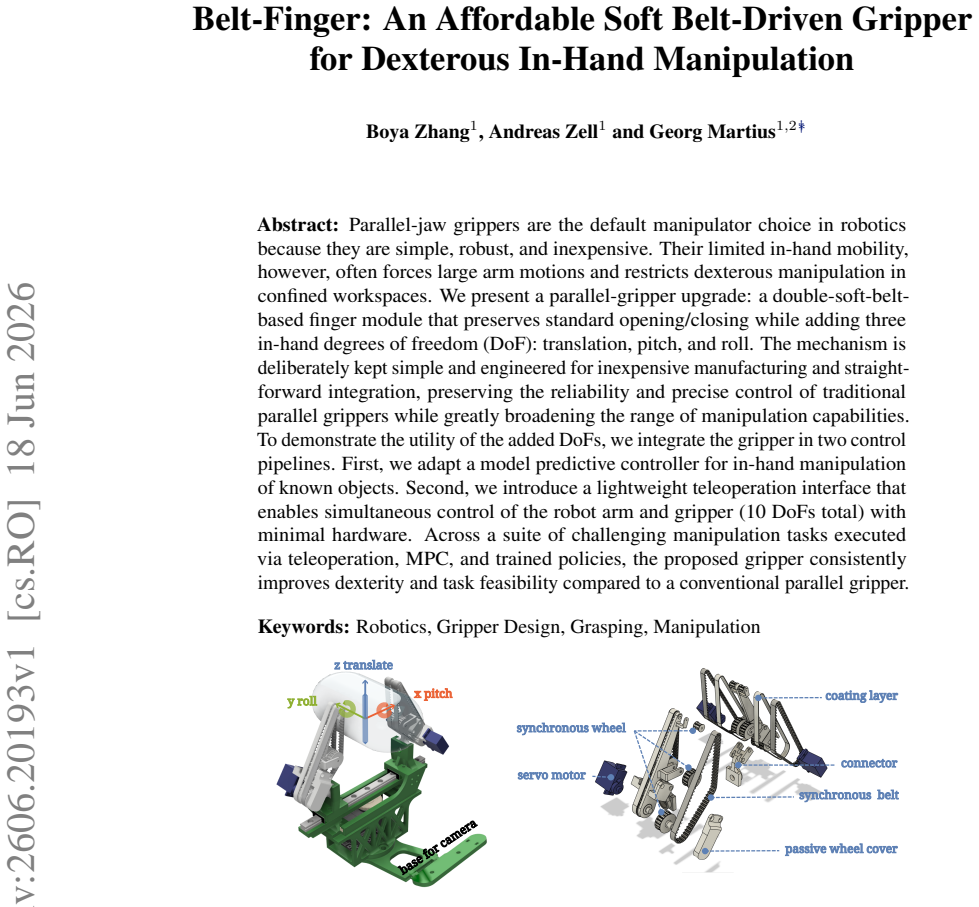
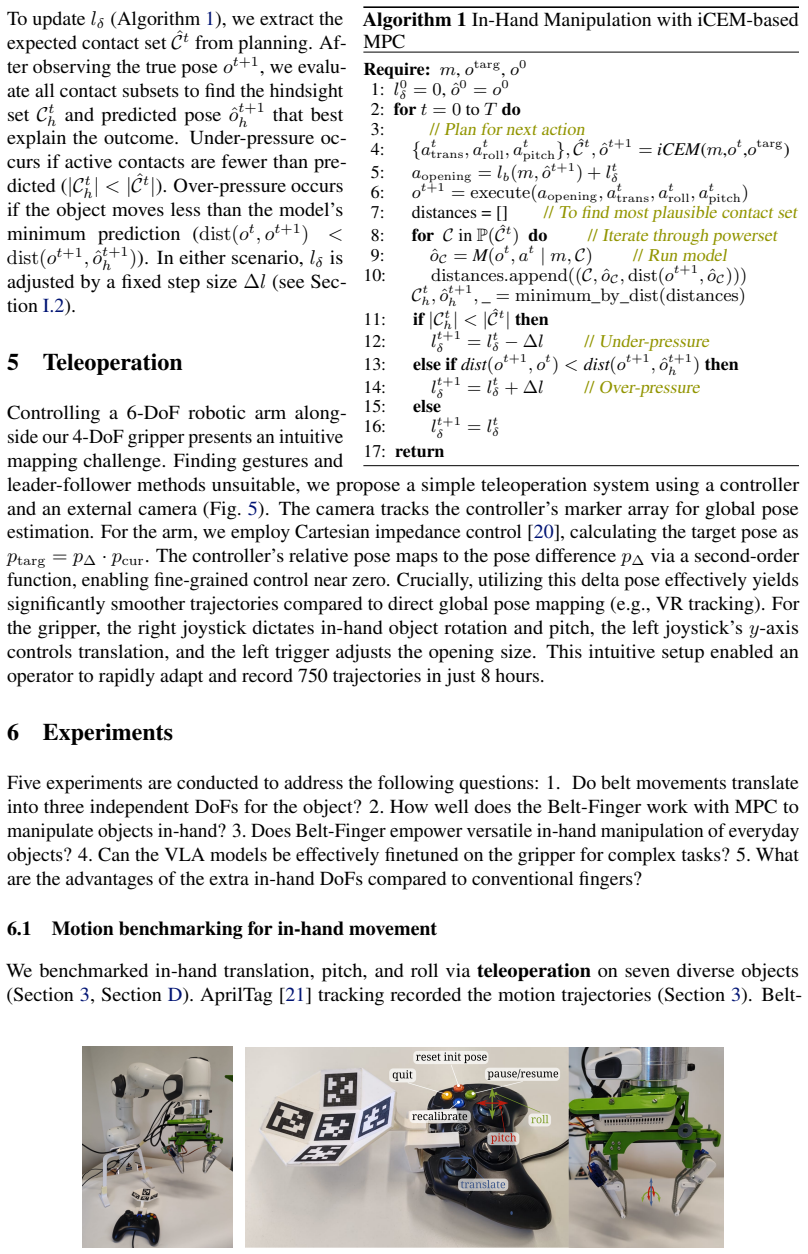
Parallel-jaw grippers are the default manipulator choice in robotics because they are simple, robust, and inexpensive. Their limited in-hand mobility, however, often forces large arm motions and restricts dexterous manipulation in confined workspaces. We present a parallel-gripper upgrade: a double-soft-belt-based finger module that preserves standard opening/closing while adding three in-hand degrees of freedom (DoF): translation, pitch, and roll. The mechanism is deliberately kept simple and engineered for inexpensive manufacturing and straightforward integration, preserving the reliability and precise control of traditional parallel grippers while greatly broadening the range of manipulation capabilities. To demonstrate the utility of the added DoFs, we integrate the gripper in two control pipelines. First, we adapt a model predictive controller for in-hand manipulation of known objects. Second, we introduce a lightweight teleoperation interface that enables simultaneous control of the robot arm and gripper (10 DoFs total) with minimal hardware. Across a suite of challenging manipulation tasks executed via teleoperation, MPC, and trained policies, the proposed gripper consistently improves dexterity and task feasibility compared to a conventional parallel gripper
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Belt-Finger, a double-soft-belt finger module designed as an upgrade to standard parallel-jaw grippers. It preserves the original opening/closing motion while adding three in-hand DoFs (translation, pitch, roll) via a belt-driven mechanism. The design is presented as simple, inexpensive to manufacture, and capable of preserving the reliability and precise control of conventional parallel grippers. Utility is shown by integrating the gripper into teleoperation (10-DoF interface), an adapted MPC controller for known objects, and trained policies, with the claim that it consistently improves dexterity and task feasibility over a baseline parallel gripper across challenging manipulation tasks.
Significance. If the performance claims are supported by quantitative evidence, the work could provide a practical, low-cost path to add in-hand dexterity to the most common gripper type without sacrificing its core advantages, potentially enabling more manipulation in confined spaces. The absence of any reported metrics, baselines, or reliability data in the abstract, however, leaves the significance currently unassessable.
major comments (2)
- [Abstract] Abstract: the central claim that the gripper 'consistently improves dexterity and task feasibility compared to a conventional parallel gripper' across teleoperation, MPC, and policy tasks is presented without any quantitative results, error bars, baseline comparisons, task success rates, or experimental protocol. This directly undermines evaluation of the primary contribution.
- [Abstract] Abstract: the assertion that the belt mechanism 'preserves the reliability and precise control of traditional parallel grippers' while adding DoFs is load-bearing for the comparison but is unsupported by any specifications on belt tension, wear, slippage thresholds, position error under load, or failure-mode analysis. Without these, the feasibility gains cannot be shown to generalize beyond the specific tasks.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments on the abstract point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the gripper 'consistently improves dexterity and task feasibility compared to a conventional parallel gripper' across teleoperation, MPC, and policy tasks is presented without any quantitative results, error bars, baseline comparisons, task success rates, or experimental protocol. This directly undermines evaluation of the primary contribution.
Authors: We agree that the abstract would benefit from quantitative support for the performance claims. In the revised manuscript we will update the abstract to include key metrics such as task success rates and baseline comparisons drawn from the experimental sections. revision: yes
-
Referee: [Abstract] Abstract: the assertion that the belt mechanism 'preserves the reliability and precise control of traditional parallel grippers' while adding DoFs is load-bearing for the comparison but is unsupported by any specifications on belt tension, wear, slippage thresholds, position error under load, or failure-mode analysis. Without these, the feasibility gains cannot be shown to generalize beyond the specific tasks.
Authors: The manuscript validates reliable operation through successful task execution without belt-related failures, but we acknowledge the abstract lacks explicit supporting specifications. We will revise the abstract to reference the design's demonstrated robustness and point to the detailed mechanism analysis in the body of the paper. revision: yes
Circularity Check
No circularity: hardware design and task results are self-contained
full rationale
The paper presents a mechanical gripper upgrade and validates it through task demonstrations using teleoperation, MPC, and policies. No equations, parameters, derivations, or self-citations appear in the provided text that could reduce a claimed result to its own inputs by construction. The central claims rest on direct experimental comparison rather than any load-bearing logical loop. This matches the expected non-circular outcome for a hardware-focused robotics paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Parallel-jaw grippers are the default manipulator choice because they are simple, robust, and inexpensive.
invented entities (1)
-
Double-soft-belt finger module
no independent evidence
Reference graph
Works this paper leans on
-
[1]
URL https://shadowrobot.com/ dexterous-hand-series/
Shadowrobot dexterous hand. URL https://shadowrobot.com/ dexterous-hand-series/. 2025
2025
- [2]
-
[3]
R. C. Ornelas, T. Cantú, I. Sperandio, A. H. Slocum, and P. Agrawal. Everyday finger: a robotic finger that meets the needs of everyday interactive manipulation. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 16016–16023. IEEE, 2024
2024
- [4]
-
[5]
C. B. Teeple, R. C. S. Louis, M. A. Graule, and R. J. Wood. The role of digit arrangement in soft robotic in-hand manipulation. In2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 7201–7208. IEEE, 2021
2021
-
[6]
Jiang, X
J. Jiang, X. Zhang, D. F. Gomes, T.-T. Do, and S. Luo. Rotipbot: Robotic handling of thin and flexible objects using rotatable tactile sensors.IEEE Transactions on Robotics, 2025
2025
-
[7]
A. J. Spiers, B. Calli, and A. M. Dollar. Variable-friction finger surfaces to enable within-hand manipulation via gripping and sliding.IEEE Robotics and Automation Letters, 3(4):4116–4123, 2018
2018
-
[8]
Tincani, G
V . Tincani, G. Grioli, M. G. Catalano, M. Garabini, S. Grechi, G. Fantoni, and A. Bicchi. Implementation and control of the velvet fingers: a dexterous gripper with active surfaces. In 2013 IEEE International Conference on Robotics and Automation, pages 2744–2750. IEEE, 2013
2013
-
[9]
Xiang, J
S. Xiang, J. Li, Y . Zhang, Y . Yang, J. Liu, and Z. Liu. Adaptive wrapping with active elastic band-based gripper for stable in-hand manipulation.Sensors and Actuators A: Physical, 377: 115743, 2024
2024
- [10]
-
[11]
S. Yuan, L. Shao, C. L. Yako, A. Gruebele, and J. K. Salisbury. Design and control of roller grasper v2 for in-hand manipulation. In2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 9151–9158. IEEE, 2020
2020
-
[12]
S. Yuan, S. Wang, R. Patel, M. Tippur, C. L. Yako, M. R. Cutkosky, E. Adelson, and K. Salisbury. Tactile-reactive roller grasper.IEEE Transactions on Robotics, 2025
2025
-
[13]
G. Xie, R. Holladay, L. Chin, and D. Rus. In-hand manipulation with a simple belted parallel- jaw gripper.IEEE Robotics and Automation Letters, 9(2):1334–1341, 2024. doi:10.1109/LRA. 2023.3346750
work page doi:10.1109/lra 2024
-
[14]
H. Wang, B. Gao, D. Zhao, and H. Shen. A reconfigurable gripper inspired by elastic belt for versatile in-hand manipulations.IEEE Robotics and Automation Letters, 10(9):9192–9199,
-
[15]
doi:10.1109/LRA.2025.3589879
-
[16]
X. Wang, L. Horrigan, J. Pinskier, G. Shi, V . Viswanathan, L. Liow, T. Bandyopadhyay, J. J. Chung, and D. Howard. Dexgrip: Multi-modal soft gripper with dexterous grasping and in-hand manipulation capacity. In2025 IEEE 8th International Conference on Soft Robotics (RoboSoft), pages 1–6. IEEE, 2025
2025
-
[17]
He.GRIP-tape: A Novel Design of Tape-Based Manipulator
G. He.GRIP-tape: A Novel Design of Tape-Based Manipulator. University of California, San Diego, 2023. 9
2023
-
[18]
URL https://esun3dstoreeu.com/ products/tpu-95a
esun etpu-95a 1.75mm 3d filament 1kg. URL https://esun3dstoreeu.com/ products/tpu-95a. 2025
2025
-
[19]
Pinneri, S
C. Pinneri, S. Sawant, S. Blaes, J. Achterhold, J. Stueckler, M. Rolinek, and G. Martius. Sample- efficient cross-entropy method for real-time planning. InConference on Robot Learning 2020,
2020
-
[20]
URLhttps://corlconf.github.io/paper_217
-
[21]
Miolane, N
N. Miolane, N. Guigui, A. L. Brigant, J. Mathe, B. Hou, Y . Thanwerdas, S. Heyder, O. Peltre, N. Koep, H. Zaatiti, H. Hajri, Y . Cabanes, T. Gerald, P. Chauchat, C. Shewmake, D. Brooks, B. Kainz, C. Donnat, S. Holmes, and X. Pennec. Geomstats: A python package for Riemannian geometry in machine learning.Journal of Machine Learning Research, 21(223):1–9, 2...
2020
-
[22]
Y . Zhu, A. Joshi, P. Stone, and Y . Zhu. Viola: Imitation learning for vision-based manipulation with object proposal priors.arXiv preprint arXiv:2210.11339, 2022. doi:10.48550/arXiv.2210. 11339
-
[23]
E. Olson. AprilTag: A robust and flexible visual fiducial system. In2011 IEEE international conference on robotics and automation, pages 3400–3407. IEEE, 2011
2011
-
[24]
J. Mahler, J. Liang, S. Niyaz, M. Laskey, R. Doan, X. Liu, J. A. Ojea, and K. Goldberg. Dex-net 2.0: Deep learning to plan robust grasps with synthetic point clouds and analytic grasp metrics. arXiv preprint arXiv:1703.09312, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[25]
O’Neill, A
A. O’Neill, A. Rehman, A. Maddukuri, A. Gupta, A. Padalkar, A. Lee, A. Pooley, A. Gupta, A. Mandlekar, A. Jain, et al. Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 6892–6903. IEEE, 2024
2024
-
[26]
Black, N
K. Black, N. Brown, J. Darpinian, K. Dhabalia, D. Driess, A. Esmail, M. R. Equi, C. Finn, N. Fusai, M. Y . Galliker, et al. \pi_{0.5}: a vision-language-action model with open-world generalization. In9th Annual Conference on Robot Learning, 2025
2025
-
[27]
Bjorck, N
NVIDIA, J. Bjorck, N. C. Fernando Castañeda, X. Da, R. Ding, L. J. Fan, Y . Fang, D. Fox, F. Hu, S. Huang, J. Jang, Z. Jiang, J. Kautz, K. Kundalia, L. Lao, Z. Li, Z. Lin, K. Lin, G. Liu, E. Llontop, L. Magne, A. Mandlekar, A. Narayan, S. Nasiriany, S. Reed, Y . L. Tan, G. Wang, Z. Wang, J. Wang, Q. Wang, J. Xiang, Y . Xie, Y . Xu, Z. Xu, S. Ye, Z. Yu, A....
2025
-
[28]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning fine-grained bimanual manipulation with low-cost hardware.arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[29]
F. R. Hogan and A. Rodriguez. Reactive planar non-prehensile manipulation with hybrid model predictive control.The International Journal of Robotics Research, 39(7):755–773, 2020
2020
-
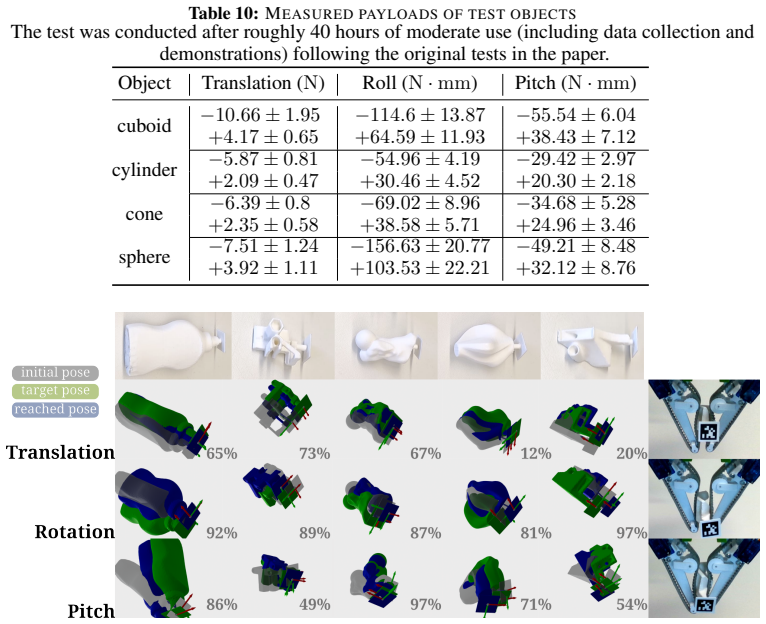
[30]
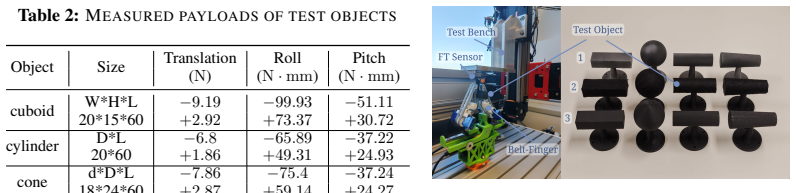
Dawson-Haggerty et al. trimesh. URLhttps://trimesh.org/. 10 A Specification of the belt finger gripper To give an intuitive understanding of the in-hand manipulation capabilities of the Belt-Finger, the max- imum force and torques of each manipulation DoFs are measured with four types of objects on the test bench shown in Fig. 6. For each object, three di...
-
[31]
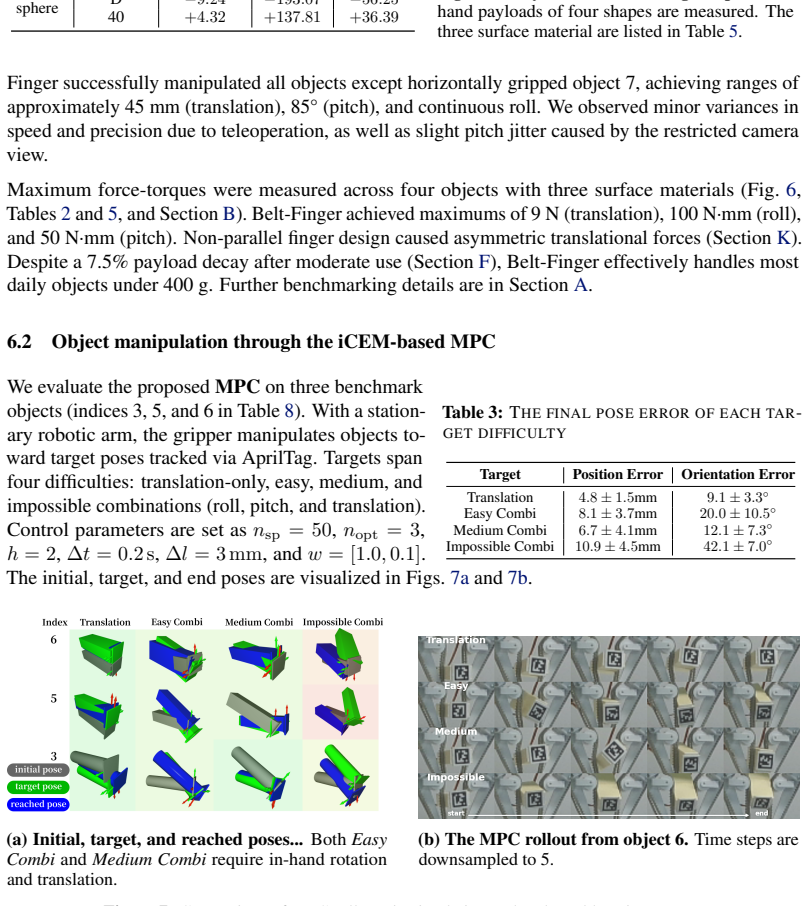
as the distance metric. It is also worth pointing out that although each target pose can be decomposed into translation and rotation in the gripper frame, this doesn’t guarantee a valid manipulation trajectory. Especially when the belt actions are not strictly mapping to the rotation or translation of the object due to the friction and the flexibility of ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.