Conformal Geometric Algebra as a Symbolic Interface for LLM-Driven 3D Scene Editing
Pith reviewed 2026-05-21 01:08 UTC · model grok-4.3
The pith
Simple Conformal Geometric Algebra preserves exact operation order in 97.5 percent of LLM-driven 3D edit chains.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
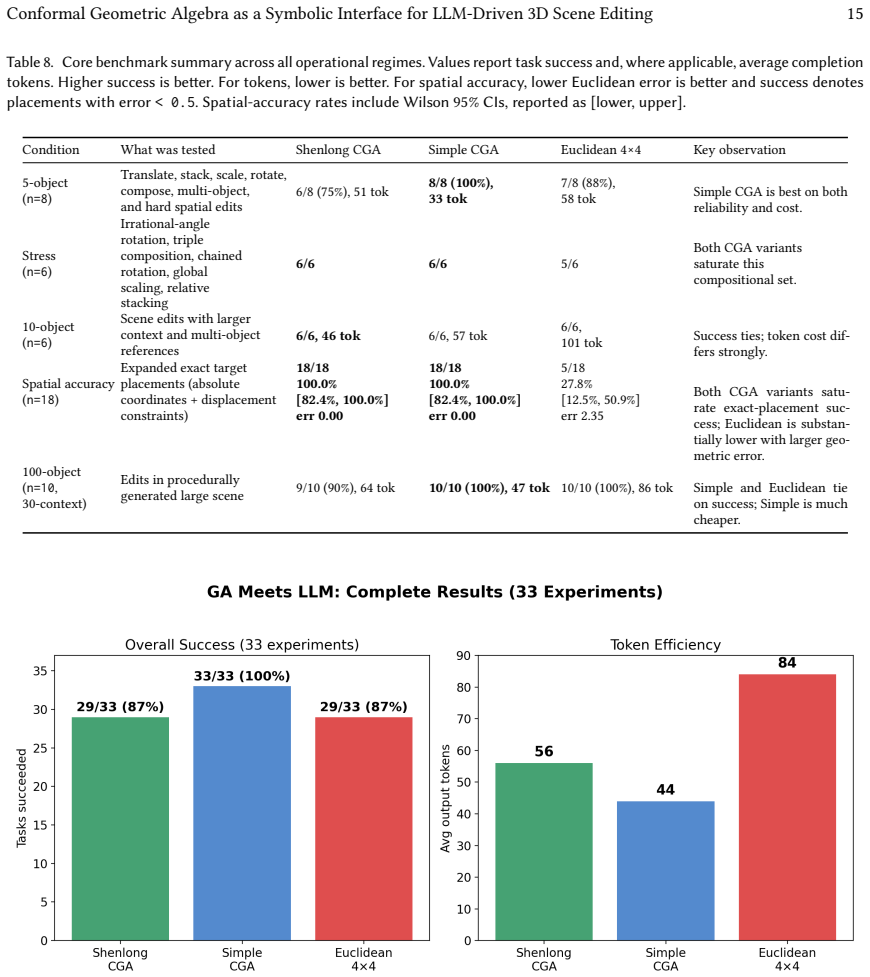
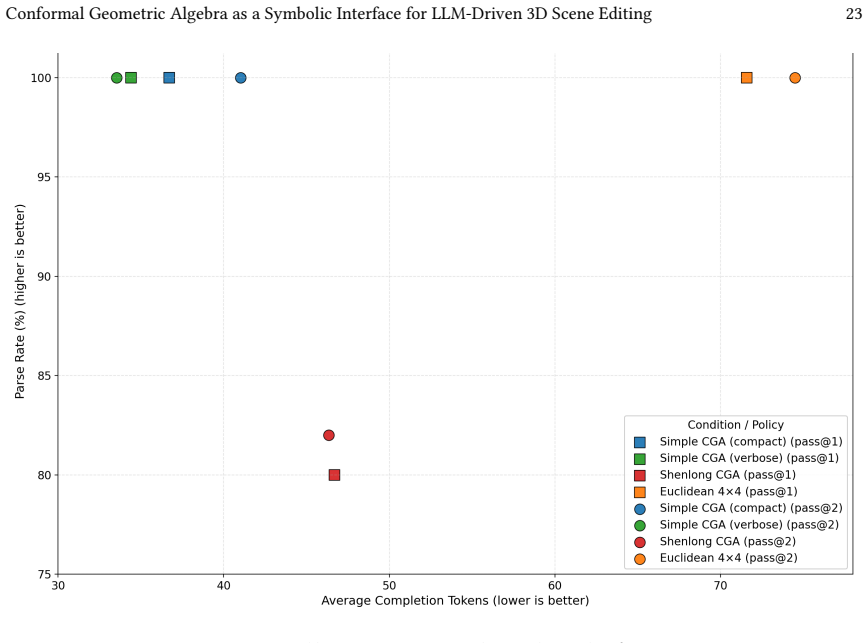
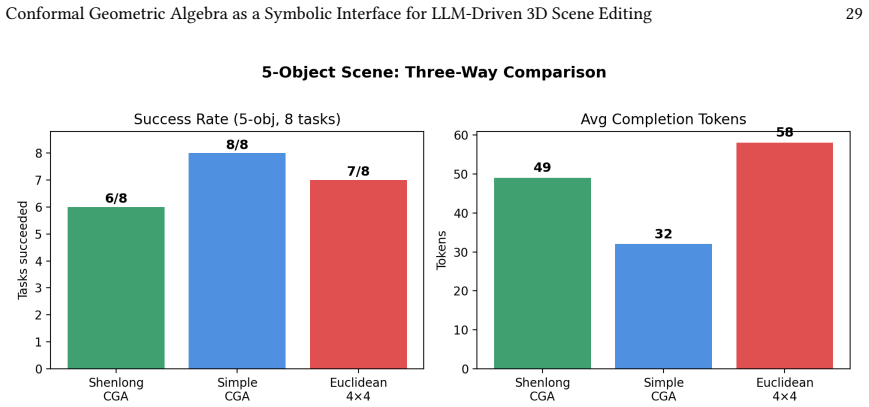
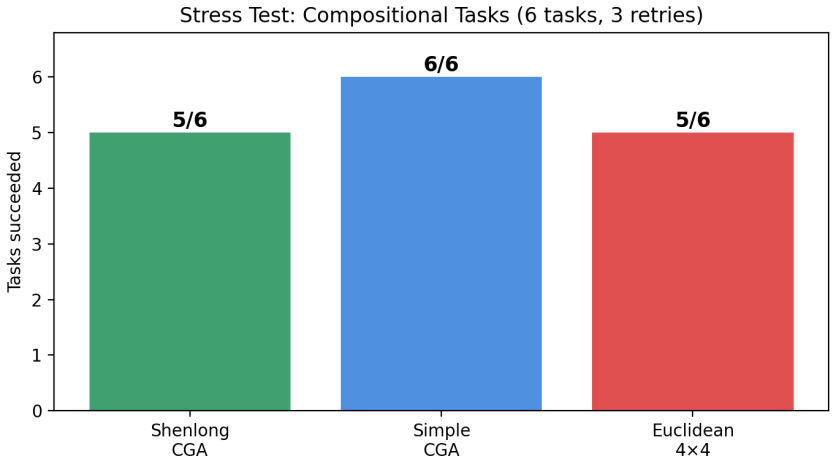
In sequence-stress tests with 120 outputs per method, Simple CGA and Compact SE3 both reach 100 percent parse validity, yet Simple CGA retains exact ordered operation chains at 97.5 percent versus 90.0 percent for Compact SE3, with lower token cost at 112.6 versus 133.6. On a powered hard-semantic suite of 100 outputs per method, compact representations achieve 42 to 45 percent success while the Euclidean baseline reaches only 24 percent. The authors conclude that CGA motor composition supplies an additional advantage on ordered instruction chains.
What carries the argument
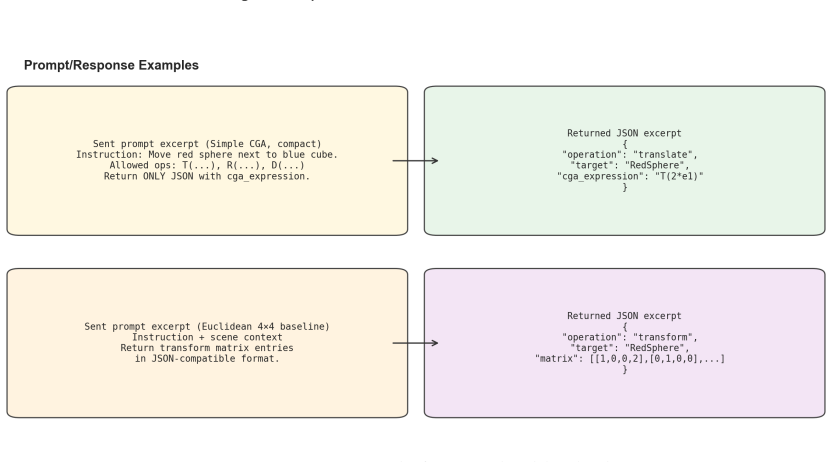
Conformal Geometric Algebra motors as a compact symbolic representation that encodes geometric transformations for direct LLM emission.
If this is right
- Compact symbolic interfaces improve both parse validity and downstream geometric correctness in LLM 3D pipelines.
- CGA's algebraic motor composition adds measurable reliability on ordered instruction sequences compared with non-algebraic compact syntax.
- Separating parse validity from geometric correctness exposes optimization headroom that syntax-only checks miss.
- Real-time natural-language editing in immersive 3D environments becomes more practical with compact algebraic formats.
Where Pith is reading between the lines
- Direct integration of CGA outputs into rendering or physics engines could shorten validation pipelines in interactive applications.
- The same algebraic interface might extend to sequential command domains such as robot motion planning or procedural animation.
- Future tests could measure whether the observed token savings and fidelity gains scale to longer instruction chains or multi-turn dialogues.
Load-bearing premise
Results from a controlled prompting protocol and deterministic geometric execution engine generalize to uncontrolled real-world LLM usage and varied scene complexities.
What would settle it
Repeating the editing tasks with free-form, uncontrolled natural-language prompts and measuring whether CGA's 97.5 percent chain-preservation rate falls below Compact SE3's rate.
Figures










read the original abstract
What symbolic format should an LLM emit for reliable 3D scene editing from natural language, and does algebraic structure help beyond compact syntax? We evaluate Conformal Geometric Algebra (CGA) as a compact symbolic interface against a verbose Euclidean 4$\times$4 matrix baseline and a non-CGA Compact SE3 control in a natural-language 3D editing pipeline with controlled prompting and deterministic geometric execution. Our primary result is compositional fidelity under sequential instruction chains. In a sequence-stress protocol (20 templates, 6 trials each; $\texttt{n=120}$ outputs per method), Simple CGA and Compact SE3 both achieve 100% parse validity, but Simple CGA preserves exact ordered operation chains more reliably (97.5% vs 90.0%, two-proportion $\texttt{p=0.016}$) with lower completion-token cost (112.6 vs 133.6 tokens). This pattern is consistent with algebraic expression form supporting compositional faithfulness beyond compactness alone. A second result is confirmatory in the powered hard semantic suite ($\texttt{n=100}$ per method): compact representations (Simple CGA 45.0%, Compact SE3 42.0%, Shenlong 44.0%) all exceed the Euclidean 4$\times$4 baseline (24.0%). Simple CGA vs Euclidean is +21 pp ($\texttt{p=0.0028}$) and Compact SE3 vs Euclidean is +18 pp ($\texttt{p=0.0103}$), while Simple CGA vs Compact SE3 is statistically close ($\texttt{p=0.7755}$). Separating parse validity from geometric correctness reveals substantial optimization headroom invisible to syntax-only metrics. Overall, compact symbolic interfaces appear to drive reliability-cost gains, with CGA motor composition providing an additional advantage on ordered instruction chains. These findings inform real-time natural-language editing in immersive and interactive 3D environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript evaluates Conformal Geometric Algebra (CGA) as a symbolic interface for LLM-driven 3D scene editing from natural language. It compares Simple CGA against Compact SE3 and a Euclidean 4x4 matrix baseline in controlled experiments: a sequence-stress protocol (20 templates, 6 trials, n=120 outputs per method) measuring parse validity and exact ordered chain preservation, plus a hard semantic suite (n=100 per method). Primary claims are 100% parse validity for both compact methods, superior chain preservation for Simple CGA (97.5% vs 90.0%, two-proportion p=0.016) with lower token cost (112.6 vs 133.6), and compact representations outperforming the Euclidean baseline on semantic tasks (45.0%, 42.0%, 44.0% vs 24.0%).
Significance. If the comparative results hold under the controlled protocol, the work provides evidence that algebraic structure in symbolic representations can enhance compositional fidelity and efficiency for LLMs in 3D editing beyond compactness alone. The statistical testing, separation of parse validity from geometric correctness, and direct comparison to a non-algebraic compact control are strengths that could inform interface design for real-time immersive applications.
major comments (1)
- The results section states that geometric correctness is separated from parse validity and reports specific percentages for the hard semantic suite, but provides no explicit criteria, metrics, or validation procedure for assessing geometric correctness (beyond parse validity). This detail is load-bearing for interpreting the reported gains (e.g., Simple CGA 45.0% vs Euclidean 24.0%, p=0.0028) and for evaluating whether the improvements reflect true geometric fidelity.
minor comments (2)
- Abstract: the token-cost figures (112.6 vs 133.6) are given without standard deviations, confidence intervals, or per-method sample details, which would strengthen the reliability-cost claim.
- The prompting protocol and deterministic execution engine are described as controlled, but additional specifics on template construction or edge-case handling would aid reproducibility of the n=120 and n=100 experiments.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive recommendation for minor revision. We address the single major comment below and will revise the manuscript accordingly to improve clarity and reproducibility.
read point-by-point responses
-
Referee: The results section states that geometric correctness is separated from parse validity and reports specific percentages for the hard semantic suite, but provides no explicit criteria, metrics, or validation procedure for assessing geometric correctness (beyond parse validity). This detail is load-bearing for interpreting the reported gains (e.g., Simple CGA 45.0% vs Euclidean 24.0%, p=0.0028) and for evaluating whether the improvements reflect true geometric fidelity.
Authors: We agree that the manuscript would benefit from an explicit description of the geometric correctness assessment. Upon review, the current text separates parse validity from geometric correctness but does not detail the exact metrics or validation steps used in the hard semantic suite. In the revised manuscript we will add a dedicated paragraph (or subsection) in the experimental protocol that specifies: (1) how each symbolic output is executed in the deterministic simulator, (2) the independent scoring of geometric fidelity via comparison of final object poses and states against ground-truth targets, and (3) the tolerance thresholds and matching rules applied. This addition will directly support interpretation of the reported success rates and statistical comparisons without altering any numerical results. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper reports results from controlled empirical comparisons of symbolic formats (Simple CGA, Compact SE3, Euclidean 4x4) in an LLM-driven 3D editing pipeline. Metrics such as parse validity (100%), exact chain preservation (97.5% vs 90.0%), token cost, and hard-semantic success rates are obtained directly from experimental runs under a fixed prompting protocol and deterministic execution engine. No derivations, fitted parameters, or equations appear in the supplied text that could reduce a claimed result to a quantity defined by the authors' own prior work or self-citations. The central claims rest on statistical tests of observed outputs rather than any self-referential construction, making the evaluation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The geometric execution engine interprets symbolic outputs deterministically and without additional errors once parsing succeeds.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
Conformal Geometric Algebra extends 3D Euclidean space R3 with two extra basis vectors to create the conformal model R4,1... rigid motions... encoded in one motor formalism, applied via the sandwich product P′=M·P·eM
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Andreas Aristidou and Joan Lasenby. 2011. Inverse Kinematics Solutions Using Conformal Geometric Algebra. InGuide to Geometric Algebra in Practice. Springer, London, 47–62
work page 2011
-
[2]
Frost, Luke Holland, Colin Orme, Jakob J
Armen Avetisyan, Chen Xie, Henry Howard-Jenkins, Tzu-Yin Yang, Sarah Aroudj, Sayan Patra, Fan Zhang, Daniel P. Frost, Luke Holland, Colin Orme, Jakob J. Engel, Eric Miller, Richard A. Newcombe, and Vassileios Balntas. 2024. SceneScript: Reconstructing Scenes With An Autoregressive Structured Language Model. InComputer Vision – ECCV 2024, Aleš Leonardis, E...
-
[3]
Luca Beurer-Kellner, Marc Fischer, and Martin Vechev. 2023. Prompting Is Programming: A Query Language for Large Language Models.Proceedings of the ACM on Programming Languages7, PLDI (2023), 1946–1969. doi:10.1145/3591300
-
[4]
2003.Geometric Algebra for Physicists
Chris Doran and Anthony Lasenby. 2003.Geometric Algebra for Physicists. Cambridge University Press, Cambridge
work page 2003
-
[5]
2007.Geometric Algebra for Computer Science: An Object-Oriented Approach to Geometry
Leo Dorst, Daniel Fontijne, and Steven Mann. 2007.Geometric Algebra for Computer Science: An Object-Oriented Approach to Geometry. Morgan Kaufmann, Burlington
work page 2007
-
[6]
Artur d’Avila Garcez and Luis C. Lamb. 2023. Neurosymbolic AI: The 3rd Wave.Artificial Intelligence Review56 (2023), 12387–12406. doi:10.1007/ s10462-023-10448-w
work page 2023
-
[7]
Guidance-AI. [n. d.]. Guidance - A Guidance Language for Controlling Large Language Models. https://github.com/guidance-ai/guidance. Accessed 20 Apr 2026
work page 2026
-
[8]
1984.Clifford Algebra to Geometric Calculus: A Unified Language for Mathematics and Physics
David Hestenes and Garret Sobczyk. 1984.Clifford Algebra to Geometric Calculus: A Unified Language for Mathematics and Physics. D. Reidel Publishing, Dordrecht
work page 1984
-
[9]
2013.Foundations of Geometric Algebra Computing
Dietmar Hildenbrand. 2013.Foundations of Geometric Algebra Computing. Springer, Berlin. doi:10.1007/978-3-642-31794-1 Conformal Geometric Algebra as a Symbolic Interface for LLM-Driven 3D Scene Editing 27
-
[10]
Wenlong Huang, Chen Wang, Ruihan Zhang, et al. 2023. VoxPoser: Composable 3D Value Maps for Robotic Manipulation with Language Models. InConference on Robot Learning (CoRL) (PMLR, Vol. 229)
work page 2023
-
[11]
Panagiotis Kolyvakis, Manos Kamarianakis, and George Papagiannakis. 2025. Geometric Algebra Meets Large Language Models: Instruction-Based Transformations of Separate Meshes in 3D, Interactive and Controllable Scenes. In2025 IEEE International Symposium on Emerging Metaverse (ISEMV). 36–45
work page 2025
-
[12]
Jacky Liang, Wenlong Huang, Fei Xia, et al. 2023. Code as Policies: Language Model Programs for Embodied Control. InIEEE International Conference on Robotics and Automation (ICRA). 9493–9500
work page 2023
-
[13]
Wenxuan Liu, Yifeng Du, Tucker Hermans, Sonia Chernova, and Chris Paxton. 2023. StructDiffusion: Language-Guided Creation of Physically-Valid Structures using Unseen Objects. InProceedings of Robotics: Science and Systems (RSS). doi:10.15607/RSS.2023.XIX.031
-
[14]
Yiming Mao, Jun Zhong, Chao Fang, Jie Zheng, Rui Tang, Hao Zhu, Ping Tan, and Ziqi Zhou. 2025. SpatialLM: Training Large Language Models for Structured Indoor Modeling. arXiv:2506.07491 [cs.CV] doi:10.48550/arXiv.2506.07491 arXiv preprint
-
[15]
George Papagiannakis, Manos Kamarianakis, Antonis Protopsaltis, Dimitris Angelis, and Paul Zikas. 2023. Project Elements: A Computational Entity-component-system in a Scene-graph Pythonic Framework, for a Neural, Geometric Computer Graphics Curriculum. InEurographics 2023 - Education Papers, Alejandra Magana and Jiri Zara (Eds.). The Eurographics Associat...
-
[16]
George Papagiannakis, Panagiotis Papanikolaou, Eirini Greassidou, and Panos Trahanias. 2014. glGA: An OpenGL Geometric Application Framework for a Modern, Shader-based Computer Graphics Curriculum. InEurographics 2014 – Education Papers
work page 2014
-
[17]
George Papagiannakis, Paul Zikas, Nikolas Lydatakis, et al. 2024. MAGES 4.0: Accelerating the World’s Transition to VR Training and Assessment. IEEE Computer Graphics and Applications44, 1 (2024), 46–56
work page 2024
-
[18]
Krishan Rana, Jesse Haviland, Sarthak Garg, et al. 2023. SayPlan: Grounding Large Language Models using 3D Scene Graphs for Scalable Robot Task Planning. InConference on Robot Learning (CoRL) (PMLR, Vol. 229)
work page 2023
- [19]
-
[20]
2008.Geometric Algebra for Computer Graphics
John Vince. 2008.Geometric Algebra for Computer Graphics. Springer, London. doi:10.1007/978-1-84628-997-2
-
[21]
Efficient Guided Generation for Large Language Models
Brandon T. Willard and Rémi Louf. 2023. Efficient Guided Generation for Large Language Models. arXiv:2307.09702 [cs.CL] doi:10.48550/arXiv.2307. 09702 10 Appendix A: Supplementary Results and Validation Tables This appendix preserves detailed outputs that were removed from the main Section 5 for readability. No experimental results are discarded. 10.1 Pro...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2307 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.