Dynamic Gradient-Based Calibration for Robust and Accurate Traffic Macrosimulation
Pith reviewed 2026-05-20 08:33 UTC · model grok-4.3
The pith
Turning traffic model calibration into a closed-loop control task stabilizes parameters and raises predictive accuracy by 48 percent.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
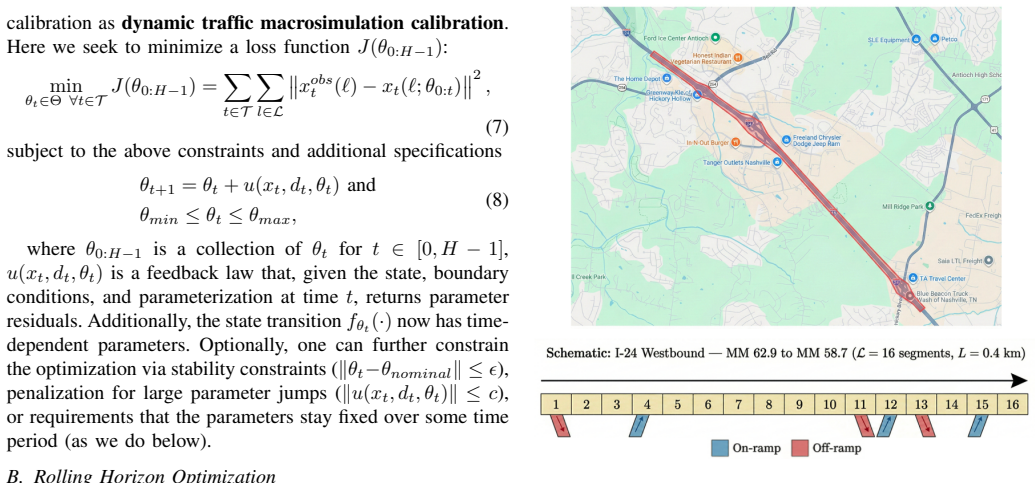
The authors establish that a dynamic rolling-horizon calibration framework, obtained by reformulating static one-time parameter estimation as a closed-loop control problem, produces parameter trajectories that remain stable and accurate in the presence of measurement noise and thereby achieves a 48 percent improvement in predictive accuracy over standard static calibration when applied to METANET on real-world I-24 traffic data.
What carries the argument
The rolling-horizon closed-loop control reformulation of the parameter estimation task, which allows gradient-based updates to track time-varying conditions without drifting into regions that generate unstable flow dynamics.
If this is right
- Parameter sets avoid generating unstable traffic dynamics even when input measurements contain noise.
- Macroscopic simulations become reliable enough to support counterfactual scenario testing and infrastructure planning.
- Gradient-based optimization becomes practical for high-dimensional traffic model spaces without the usual convergence failures.
- Downstream traffic prediction and control applications gain accuracy and trustworthiness from the improved parameter quality.
Where Pith is reading between the lines
- The same closed-loop reformulation could stabilize calibration tasks in other engineering domains that face nonconvex landscapes, such as power-grid parameter fitting or chemical process identification.
- The framework naturally supports online versions in which parameters update in real time as fresh sensor streams arrive rather than in offline batches.
- Specific controller choices inside the closed loop, such as model-predictive or adaptive designs, might further reduce any residual bias in the resulting parameter trajectories.
Load-bearing premise
Recasting one-time parameter estimation as a closed-loop control problem will produce stable parameter trajectories without introducing new instabilities or biases from the controller design itself.
What would settle it
A side-by-side run of both methods on additional I-24 MOTION segments in which the dynamic approach shows either higher prediction error than static calibration or visibly unrealistic simulated behavior such as spurious stop-and-go waves.
Figures






read the original abstract
Robust and accurate calibration of macroscopic traffic flow models such as METANET is critical for reliable prediction and effective control. While gradient-based methods are desirable for high-dimensional parameter spaces, their application to real-world traffic scenarios is hindered by highly nonconvex optimization landscapes. Consequently, standard static calibration frequently yields parameter sets that produce unstable, unrealistic traffic dynamics, undermining confidence in the estimated parameters and compromising the simulation's utility for counterfactual scenario testing. To address this, we propose a dynamic, rolling-horizon calibration framework. By reformulating static one-time estimation as a closed-loop control problem, parameters better maintain stability and accuracy in the presence of measurement noise. Using real-world data from the I-24 MOTION testbed, this work empirically characterizes the instability of standard methods. It then shows that the proposed approach simultaneously enhances robustness to perturbations and achieves a 48% improvement in predictive accuracy over conventional static calibration.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a dynamic gradient-based calibration framework for robust and accurate traffic macrosimulation using models like METANET. By reformulating the traditional static one-time parameter estimation as a closed-loop control problem with a rolling horizon, the method aims to maintain parameter stability and accuracy in the presence of measurement noise and nonconvex optimization landscapes. Empirical evaluation on real-world data from the I-24 MOTION testbed demonstrates enhanced robustness to perturbations and a 48% improvement in predictive accuracy compared to conventional static calibration.
Significance. Should the empirical claims be substantiated with detailed methodological descriptions and statistical analyses, this work has the potential to significantly improve the reliability of macroscopic traffic simulations for applications in prediction, control, and scenario testing. Addressing the instability issues in gradient-based methods for high-dimensional parameter spaces could have broad implications for transportation engineering.
major comments (2)
- [Abstract] The abstract states an empirical 48% accuracy gain on I-24 data but provides no quantitative details on the optimization formulation, noise model, baseline implementation, or statistical significance. This leaves the central claim only weakly supported.
- [Abstract] There is no reference to eigenvalue analysis, gain-margin verification, or ablation studies on controller parameters, which are needed to confirm that the closed-loop design does not introduce new instabilities or systematic bias in the parameter trajectories for the nonconvex METANET landscape.
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's comments. We address each of the major comments in detail below and have revised the manuscript to incorporate the feedback where possible.
read point-by-point responses
-
Referee: [Abstract] The abstract states an empirical 48% accuracy gain on I-24 data but provides no quantitative details on the optimization formulation, noise model, baseline implementation, or statistical significance. This leaves the central claim only weakly supported.
Authors: We agree that the abstract, due to its brevity, does not include all methodological details. The full optimization formulation, noise model, baseline implementation details, and statistical significance analyses are presented in Sections 3 (Methodology) and 4 (Experiments) of the manuscript. To better support the claim in the abstract, we have revised it to briefly mention the rolling-horizon approach and the use of real-world I-24 MOTION data with statistical comparisons. We believe this addresses the concern while maintaining the abstract's conciseness. revision: yes
-
Referee: [Abstract] There is no reference to eigenvalue analysis, gain-margin verification, or ablation studies on controller parameters, which are needed to confirm that the closed-loop design does not introduce new instabilities or systematic bias in the parameter trajectories for the nonconvex METANET landscape.
Authors: This is a thoughtful suggestion for strengthening the theoretical grounding. However, given the highly nonconvex nature of the METANET parameter space, performing a complete eigenvalue analysis or gain-margin verification is not straightforward and may not yield meaningful insights for the dynamic calibration framework. Instead, the manuscript provides extensive empirical validation through robustness tests under noise and perturbations, showing improved stability in parameter trajectories compared to static methods. We have added ablation studies on the controller parameters (such as the rolling horizon length and adaptation rate) in the revised manuscript, with results demonstrating that the chosen parameters do not introduce systematic bias or instabilities. A discussion of these limitations and the empirical approach to stability has been included in Section 5. revision: partial
Circularity Check
No significant circularity; empirical comparison on external data is self-contained
full rationale
The paper reformulates static calibration as a closed-loop control problem and reports a 48% predictive-accuracy gain measured against a conventional static baseline on real-world I-24 MOTION testbed data. No equation, parameter fit, or self-citation is shown to reduce the claimed robustness or accuracy improvement to an input quantity by construction. The derivation chain consists of a methodological proposal followed by direct empirical characterization of instability and comparative evaluation; both are externally falsifiable against held-out traffic measurements and do not rely on load-bearing self-citations or definitional equivalence.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption METANET macroscopic model equations accurately capture traffic dynamics under the conditions tested
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
gradient-based calibration... highly nonconvex optimization landscapes
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
M. Papageorgiou, I. Papamichail, and Y . Wang, “The role of macroscopic modeling in the simulation, surveillance and control of motorway network traffic,” inTransport Simulation. EPFL Press, 2019, pp. 3–25
work page 2019
-
[2]
Traffic flow modeling of large-scale motorway networks using the macroscopic modeling tool metanet,
A. Kotsialos, M. Papageorgiou, C. Diakaki, Y . Pavlis, and F. Middelham, “Traffic flow modeling of large-scale motorway networks using the macroscopic modeling tool metanet,”IEEE Transactions on intelligent transportation systems, vol. 3, no. 4, pp. 282–292, 2002
work page 2002
-
[3]
Perfor- mance of continuum models for realworld traffic flows: Comprehensive benchmarking,
S. Mohammadian, Z. Zheng, M. M. Haque, and A. Bhaskar, “Perfor- mance of continuum models for realworld traffic flows: Comprehensive benchmarking,”Transportation Research Part B: Methodological, vol. 147, pp. 132–167, 2021
work page 2021
-
[4]
Gradient-enhanced kriging for high- dimensional problems,
M. A. Bouhlel and J. R. Martins, “Gradient-enhanced kriging for high- dimensional problems,”Engineering with Computers, vol. 35, no. 1, pp. 157–173, 2019
work page 2019
-
[5]
Bayesian optimization techniques for high- dimensional simulation-based transportation problems,
T. Tay and C. Osorio, “Bayesian optimization techniques for high- dimensional simulation-based transportation problems,”Transportation Research Part B: Methodological, vol. 164, pp. 210–243, 2022
work page 2022
-
[6]
Macroscopic traffic flow model calibration using different optimization algorithms,
A. Spiliopoulou, I. Papamichail, M. Papageorgiou, Y . Tyrinopoulos, and J. Chrysoulakis, “Macroscopic traffic flow model calibration using different optimization algorithms,”Operational Research, vol. 17, no. 1, pp. 145–164, 2017
work page 2017
-
[7]
J. R. D. Frejo, E. F. Camacho, and R. Horowitz, “A parameter identifi- cation algorithm for the metanet model with a limited number of loop detectors,” in2012 IEEE 51st IEEE Conference on Decision and Control (CDC). IEEE, 2012, pp. 6983–6988
work page 2012
-
[8]
Empirical studies on traffic flow in inclement weather,
R. Hranac, E. D. Sterzin, D. Krechmer, H. Rakha, and M. Farzaneh, “Empirical studies on traffic flow in inclement weather,” 2006
work page 2006
-
[9]
Y . Wang, M. Papageorgiou, and A. Messmer, “Real-time freeway traffic state estimation based on extended kalman filter: Adaptive capabilities and real data testing,”Transportation Research Part A: Policy and Practice, vol. 42, no. 10, pp. 1340–1358, 2008
work page 2008
-
[10]
Metanet: A macroscopic simulation program for motorway networks,
A. Messmer and M. Papageorgiou, “Metanet: A macroscopic simulation program for motorway networks,”Traffic engineering & control, vol. 31, no. 9, 1990
work page 1990
-
[11]
Imputation of ramp flow data for freeway traffic simulation,
A. Muralidharan and R. Horowitz, “Imputation of ramp flow data for freeway traffic simulation,”Transportation Research Record, vol. 2099, no. 1, pp. 58–64, 2009
work page 2099
-
[12]
Bounded-metanet: A new discrete-time second-order macroscopic traffic flow model for bounded speed,
W. Zhao, C. Roncoli, and M. Yildirimoglu, “Bounded-metanet: A new discrete-time second-order macroscopic traffic flow model for bounded speed,”Transportation Research Part C: Emerging Technologies, vol. 180, p. 105345, 2025
work page 2025
-
[13]
A rolling-horizon approach for multi- period optimization,
L. Glomb, F. Liers, and F. R ¨osel, “A rolling-horizon approach for multi- period optimization,”European Journal of Operational Research, vol. 300, no. 1, pp. 189–206, 2022
work page 2022
-
[14]
I-24 motion: An instrument for freeway traffic science,
D. Gloudemans, Y . Wang, J. Ji, G. Zachar, W. Barbour, E. Hall, M. Cebelak, L. Smith, and D. B. Work, “I-24 motion: An instrument for freeway traffic science,”Transportation Research Part C: Emerging Technologies, vol. 155, p. 104311, 2023
work page 2023
-
[15]
Dissipating stop-and-go waves in closed and open networks via deep reinforcement learning,
A. R. Kreidieh, C. Wu, and A. M. Bayen, “Dissipating stop-and-go waves in closed and open networks via deep reinforcement learning,” in 2018 21st international conference on intelligent transportation systems (itsc). IEEE, 2018, pp. 1475–1480
work page 2018
-
[16]
Z. He, J. Laval, Y . Han, A. Hegyi, R. Nishi, and C. Wu, “A review of stop-and-go traffic wave suppression strategies: Variable speed limit vs. jam-absorption driving,”arXiv preprint arXiv:2504.11372, 2025. 0 10 20 30 40ΔMAPE from baseline (%) ´ ∙ ¿ -10 -5 0 5 10 Perturbation (%) 0 10 20 30 40ΔMAPE from baseline (%) ½cr -10 -5 0 5 10 Perturbation (%) vfre...
-
[17]
M. Ameli, S. T. Mcquade, J. W. Lee, M. Bunting, M. W. Nice, H. Wang, W. Barbour, R. Weightman, C. Denaro, R. Delorenzoet al., “Design, preparation, and execution of the 100-av field test for the circles consortium: Methodology and implementation of the largest mobile traffic control experiment to date,”IEEE Control Systems, vol. 45, no. 1, pp. 139–155, 2025
work page 2025
-
[18]
L. T. Biegler and V . M. Zavala, “Large-scale nonlinear programming using ipopt: An integrating framework for enterprise-wide dynamic optimization,”Computers & Chemical Engineering, vol. 33, no. 3, pp. 575–582, 2009
work page 2009
-
[19]
A feedback linearization approach for coordinated traffic flow management in highway systems,
K. Chavoshi, A. Ferrara, and A. Kouvelas, “A feedback linearization approach for coordinated traffic flow management in highway systems,” Control Engineering Practice, vol. 139, p. 105615, 2023
work page 2023
-
[20]
Methodology for calibration and validation of mesoscopic traffic simulation models,
M. Zhao and J. Appiah, “Methodology for calibration and validation of mesoscopic traffic simulation models,” 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.