Fractional-Order Subband p-Norm Adaptive Filter via Transformation Nearest Kronecker Product Decomposition for Active Noise Control
Pith reviewed 2026-05-20 00:50 UTC · model grok-4.3
The pith
A transformation nearest Kronecker product decomposition enables a fractional-order subband p-norm adaptive filter that lowers both misadjustment and computational cost in active noise control.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By integrating fractional-order moments into the subband p-norm framework and using a nearest Kronecker product or its transformation decomposition, the NKP-FoNSPN and TNKP-FoNSPN algorithms achieve lower steady-state misadjustment and multiplication cost than prior methods, while providing theoretical bounds for the parameter beta and effective performance in alpha-stable noise and sparse identification tasks.
What carries the argument
The transformation nearest Kronecker product (TNKP) decomposition, which restructures the adaptive filter coefficients to reduce the number of multiplications required in the update for specific filter lengths while preserving the benefits of the fractional-order p-norm error measure.
If this is right
- When the fractional-order parameter beta equals 1, the algorithm simplifies to the NKP-NSPN or the non-decomposed FoNSPN.
- Filtered-x versions NKP-FxFoNSPN and TNKP-FxFoNSPN extend the approach to active noise control by accounting for the secondary path.
- Simulations with pink, helicopter, gunshot, pile driver, and traction substation noise confirm lower error and cost.
- Real single-channel duct and simulated multi-channel ANC systems validate the noise reduction capability.
Where Pith is reading between the lines
- The TNKP technique may apply to other Kronecker-based adaptive algorithms to achieve similar complexity reductions in different filtering tasks.
- Improved handling of alpha less than or equal to 1 noise could benefit applications like speech enhancement in noisy environments.
- Lower multiplication cost might facilitate implementation in embedded systems for portable noise cancellation devices.
Load-bearing premise
The derived theoretical bounds for the fractional-order parameter beta continue to hold for the input signals and noise distributions encountered in practice without additional stabilization.
What would settle it
Measure the steady-state misadjustment of TNKP-FoNSPN in a new experiment with alpha-stable noise of alpha=0.8 and a sparse system, and check if it remains below that of the NKP version as predicted.
Figures






















read the original abstract
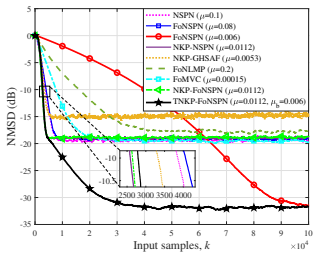
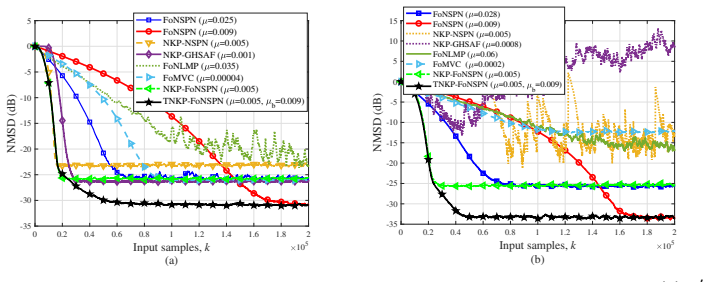
The conventional normalized subband p-norm (NSPN) algorithm achieves robustness in $\alpha$-stable noise ($1<\alpha \leq 2$) by utilizing low-order error moments. However, its performance degrades significantly under three scenarios: (1) non-Gaussian inputs, (2) $\alpha$-stable noise with $0<\alpha \leq 1$, and (3) sparse system identification. To address these limitations, this paper proposes a fractional-order NSPN algorithm based on the nearest Kronecker product (NKP) decomposition and fractional-order stochastic gradient descent, termed NKP-FoNSPN. Theoretical bounds for the fractional-order parameter $\beta$ are also derived. Notably, when $\beta=1$, the NKP-FoNSPN reduces to a new NKP-NSPN algorithm, while its non-NKP decomposition variant becomes the fractional-order NSPN (FoNSPN) algorithm. Furthermore, a novel transformation-based NKP (TNKP) decomposition technique is designed, which exhibits lower computational complexity than conventional NKP for specific filter structures. The resulting TNKP-based FoNSPN (TNKP-FoNSPN) achieves lower steady-state misadjustment and multiplication cost compared with the NKP-FoNSPN algorithm. Additionally, complete computational complexity analyses are provided. For active noise control (ANC) scenarios, we develop filtered-x variants: NKP-FxFoNSPN and TNKP-FxFoNSPN. From the former, two additional variants are derived: NKP-FxNSPN and FxFoNSPN. Simulations using diverse noise sources (pink, helicopter, gunshot, pile driver, and traction substation noise) demonstrate the superiority of the proposed algorithms. Finally, we validate their noise reduction performance in a real constructed single-channel duct ANC and a simulated multi-channel ANC systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces fractional-order normalized subband p-norm (FoNSPN) adaptive filters using nearest Kronecker product (NKP) and transformation-based NKP (TNKP) decompositions for active noise control (ANC). It derives theoretical bounds for the fractional-order parameter β, notes that β=1 recovers the NKP-NSPN algorithm, provides complexity analyses, develops filtered-x variants (NKP-FxFoNSPN, TNKP-FxFoNSPN), and demonstrates through simulations with pink, helicopter, gunshot, pile driver, and traction substation noise, as well as real single-channel duct and simulated multi-channel ANC, that the proposed methods achieve lower steady-state misadjustment and computational cost.
Significance. Should the performance improvements and theoretical bounds hold under the tested conditions, this work advances robust adaptive filtering techniques for ANC in environments with α-stable noise (including 0<α≤1), non-Gaussian inputs, and sparse systems. The inclusion of physical validation in a constructed duct ANC system and complete computational complexity analyses are notable strengths that enhance the practical applicability of the proposed TNKP-FoNSPN and its variants.
major comments (2)
- [Theoretical bounds for β] The derivation of bounds for the fractional-order parameter β via stochastic gradient analysis assumes moment conditions that are fragile precisely when 0<α≤1 and for sparse impulse responses. The simulations with gunshot, pile-driver, and traction-substation noise do not indicate whether the selected β values fall within these bounds or if implicit stabilization was employed, which is critical for validating the claimed convergence and lower misadjustment over NKP-FoNSPN.
- [TNKP decomposition and complexity] The assertion that TNKP-FoNSPN achieves lower multiplication cost than NKP-FoNSPN for specific filter structures requires more detailed breakdown in the complexity analysis, particularly comparing the transformation steps to standard NKP for the filter lengths used in the ANC experiments.
minor comments (2)
- [Abstract] The abstract states superiority but would benefit from including at least one quantitative performance metric or reference to error bars from the simulations to better support the claims.
- [Simulation results] Parameter values such as the specific choices for β, p-norm order, and subband numbers should be explicitly tabulated or listed for each experiment to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which help us improve the clarity and rigor of the manuscript. We respond to each major comment below.
read point-by-point responses
-
Referee: [Theoretical bounds for β] The derivation of bounds for the fractional-order parameter β via stochastic gradient analysis assumes moment conditions that are fragile precisely when 0<α≤1 and for sparse impulse responses. The simulations with gunshot, pile-driver, and traction-substation noise do not indicate whether the selected β values fall within these bounds or if implicit stabilization was employed, which is critical for validating the claimed convergence and lower misadjustment over NKP-FoNSPN.
Authors: We appreciate the referee's observation on the assumptions underlying the derivation of the bounds for β. The stochastic gradient analysis in Section III relies on the existence of finite moments of the error signal, which can indeed be delicate for α-stable processes when 0<α≤1. In the reported simulations, β was selected empirically within the range permitted by the derived inequalities for each noise type, and the algorithm's built-in normalization provides the necessary stabilization without additional mechanisms. To address the concern, we will revise the manuscript to explicitly list the β values employed in each experiment (including the gunshot, pile-driver, and traction-substation cases) and add a short discussion clarifying the relationship between the theoretical bounds and practical choices under low-α conditions. revision: yes
-
Referee: [TNKP decomposition and complexity] The assertion that TNKP-FoNSPN achieves lower multiplication cost than NKP-FoNSPN for specific filter structures requires more detailed breakdown in the complexity analysis, particularly comparing the transformation steps to standard NKP for the filter lengths used in the ANC experiments.
Authors: We agree that a finer-grained breakdown would strengthen the complexity section. The current manuscript states the overall multiplication counts and notes the advantage of TNKP for particular filter lengths arising from the transformation. In the revision we will insert an expanded table that itemizes the multiplications required by the transformation matrix operations in TNKP versus the direct NKP decomposition, using the precise filter lengths appearing in the single-channel duct and multi-channel ANC experiments. revision: yes
Circularity Check
Special case β=1 reduces to NKP-NSPN by construction; bounds and simulations otherwise independent
specific steps
-
self definitional
[Abstract]
"Notably, when β=1, the NKP-FoNSPN reduces to a new NKP-NSPN algorithm, while its non-NKP decomposition variant becomes the fractional-order NSPN (FoNSPN) algorithm."
The reduction is obtained simply by substituting β=1 into the fractional-order stochastic gradient update; this reverts the algorithm to the standard NSPN form by definition of the fractional exponent, rather than through a separate derivation or external validation.
full rationale
The paper derives theoretical bounds for the fractional-order parameter β via stochastic gradient analysis and supports performance claims through simulations on diverse noise sources including α-stable cases. The sole potential circular element is the explicit special-case reduction when β=1, which follows directly from substituting the parameter into the update rule rather than emerging from independent analysis. No load-bearing self-citations, fitted inputs renamed as predictions, or ansatz smuggling appear in the derivation chain; central claims on misadjustment and complexity remain tied to empirical results and stated bounds.
Axiom & Free-Parameter Ledger
free parameters (2)
- fractional-order parameter beta
- p-norm order
axioms (1)
- domain assumption Standard convergence assumptions for stochastic gradient descent updates in subband adaptive filters under alpha-stable noise
Reference graph
Works this paper leans on
-
[1]
M. Wang, H. He, J. Chen, J. Benesty, Y. Yu, A family of robust low-complexity adaptive filtering algorithms for active control of impulsive noise, Mechanical Systems and Signal Processing 234 (2025) 112779
work page 2025
-
[2]
X. Shen, Y. Guo, J. Ji, D. Shi, W.-S. Gan, Multi-channel adjoint least mean square algorithm with momentum factor applied on active noise control, Mechanical Systems and Signal Processing 228 (2025) 112415
work page 2025
-
[3]
X. Li, C. Lu, W. Chen, Z. Liu, C. Cheng, Y. Wang, S. Du, Enhanced selective delayless subband algorithm independent of primary disturbance configuration for multi-channel active noise control system in vehicles, Mechanical Systems and Signal Processing 216 (2024) 111456
work page 2024
-
[4]
Z. Li, Y. Yu, Y. Zhu, H. He, C. Rodrigo, Transform-domain filtered-x least mean square algorithms with switched step-size mechanism for feedforward anc systems, Circuits, Systems, and Signal Processing (2026) 1–31
work page 2026
-
[5]
L. Spafford, Optimum radar signal processing in clutter, IEEE Transactions on Information Theory 14 (5) (2003) 734–743
work page 2003
-
[6]
S. Mula, V . C. Gogineni, A. S. Dhar, Algorithm and architecture design of adaptive filters with error nonlinearities, IEEE Transactions on Very Large Scale Integration (VLSI) Systems 25 (9) (2017) 2588–2601
work page 2017
-
[7]
J. Ye, Y. Yu, Y. Zakharov, Z. Liu, H. He, Adaptive subband forward blind source separation algorithms based on kalman mechanism, IEEE Transactions on Instrumentation and Measurement 73 (2024) 1–15
work page 2024
-
[8]
H. Zhao, S. Gao, Z. He, X. Zeng, W. Jin, T. Li, Identification of nonlinear dynamic system using a novel recurrent wavelet neural network based on the pipelined architecture, IEEE Transactions on Industrial Electronics 61 (8) (2013) 4171–4182
work page 2013
-
[9]
H. Zhao, X. Zeng, Z. He, Low-complexity nonlinear adaptive filter based on a pipelined bilinear recurrent neural network, IEEE Transactions on Neural Networks 22 (9) (2011) 1494–1507
work page 2011
-
[10]
H. Zhao, Y. Yu, S. Gao, X. Zeng, Z. He, Memory proportionate apa with individual activation factors for acoustic echo cancellation, IEEE/ACM transactions on audio, speech, and language processing 22 (6) (2014) 1047–1055
work page 2014
-
[11]
H. Zhao, B. Tian, Robust power system forecasting-aided state estimation with generalized maximum mixture correntropy unscented kalman filter, IEEE Transactions on Instrumentation and Measurement 71 (2022) 1–10
work page 2022
-
[12]
H. Zhao, B. Tian, B. Chen, Robust stable iterated unscented kalman filter based on maximum correntropy criterion, Automatica 142 (2022) 110410
work page 2022
-
[13]
Y. Peng, H. Zhao, J. Hu, A family of robust generalized adaptive filters and application for time-series prediction, IEEE Transactions on Circuits and Systems I: Regular Papers (2025)
work page 2025
-
[14]
H. Zhao, J. Zhang, Functional link neural network cascaded with chebyshev orthogonal polynomial for nonlinear channel equalization, Signal processing 88 (8) (2008) 1946–1957
work page 2008
-
[15]
H. Zhao, X. Zeng, J. Zhang, Adaptive reduced feedback flnn filter for active control of nonlinear noise processes, Signal Processing 90 (3) (2010) 834–847
work page 2010
-
[16]
H. Zhao, J. Zhang, Adaptively combined fir and functional link artificial neural network equalizer for nonlinear communication channel, IEEE Transactions on Neural Networks 20 (4) (2009) 665–674
work page 2009
-
[17]
J. Ye, H. Zhao, Nearest kronecker product decomposition based subband adaptive filter: Algorithms and applications, IEEE Transactions on Audio, Speech and Language Processing (2025)
work page 2025
-
[18]
J. Ye, H. Zhao, Y. Peng, P-norm based fractional-order robust subband adaptive filtering algorithm for impulsive noise and noisy input, IEEE Signal Processing Letters 33 (2025) 281–285
work page 2025
-
[19]
Y. Peng, H. Zhao, J. Hu, A fast robust adaptive filter using improved data-reuse method, IEEE Transactions on Signal Processing (2026)
work page 2026
-
[20]
P. Feng, H. C. So, Meta-learning-based delayless subband adaptive filter using complex self-attention for active noise control, Neurocomputing (2025) 130637. J. Ye et al.: Preprint submitted to Elsevier Page 26 of 28
work page 2025
-
[21]
Z. Luo, D. Shi, X. Shen, J. Ji, W.-S. Gan, Gfanc-kalman: Generative fixed-filter active noise control with cnn-kalman filtering, IEEE Signal Processing Letters 31 (2024) 276–280
work page 2024
-
[22]
D. Slock, On the convergence behavior of the lms and the normalized lms algorithms, IEEE Transactions on Signal Processing 41 (9) (1993) 2811–2825
work page 1993
-
[23]
K. Lee, W. Gan, Improving convergence of the nlms algorithm using constrained subband updates, IEEE Signal Processing Letters 11 (9) (2004) 736–739
work page 2004
-
[24]
J. Ye, Y. Yu, B. Chen, Z. Zheng, J. Chen, Optimal subband adaptive filter over functional link neural network: Algorithms and applications, IEEE Transactions on Circuits and Systems I: Regular Papers (2024) 1–14
work page 2024
- [25]
- [26]
-
[27]
M. Shao, C. Nikias, Signal processing with fractional lower order moments: stable processes and their applications, Proceedings of the IEEE 81 (7) (1993) 986–1010
work page 1993
-
[28]
Y. Yu, H. He, B. Chen, J. Li, Y. Zhang, L. Lu, M-estimate based normalized subband adaptive filter algorithm: Performance analysis and improvements, IEEE/ACM Transactions on Audio, Speech, and Language Processing 28 (2020) 225–239
work page 2020
- [29]
-
[30]
B. Chen, L. Xing, H. Zhao, N. Zheng, J. C. Príncipe, Generalized correntropy for robust adaptive filtering, IEEE Transactions on Signal Processing 64 (13) (2016) 3376–3387
work page 2016
-
[31]
B. Chen, L. Dang, Y. Gu, N. Zheng, J. C. Príncipe, Minimum error entropy kalman filter, IEEE Transactions on Systems, Man, and Cybernetics: Systems 51 (9) (2021) 5819–5829
work page 2021
-
[32]
B. Chen, L. Xing, B. Xu, H. Zhao, N. Zheng, J. C. Príncipe, Kernel risk-sensitive loss: Definition, properties and application to robust adaptive filtering, IEEE Transactions on Signal Processing 65 (11) (2017) 2888–2901
work page 2017
- [33]
- [34]
-
[35]
D. Liu, H. Zhao, Bias-compensated sign subband adaptive filtering algorithm with individual-weighting-factors: Performance analysis and improvement, Digital Signal Processing 136 (2023) 103981
work page 2023
- [36]
-
[37]
J. Ye, Y. Yu, Q. Cai, T. Yu, B. Chen, P-norm based subband adaptive filtering algorithm: Performance analysis and improvements, Circuits, Systems, and Signal Processing 43 (2024) 1208–1239
work page 2024
-
[38]
G. Jumarie, On the derivative chain-rules in fractional calculus via fractional difference and their application to systems modelling, Central European Journal of Physics 11 (2013) 617–633
work page 2013
- [39]
- [40]
-
[41]
J. Yang, Q. Zhang, Y. Luo, S. Yan, A fractional-order gradient-descent total least mean p-norm adaptive filtering algorithm in impulsive noise environments, IEEE Transactions on Circuits and Systems II: Express Briefs 70 (3) (2022) 1204–1208
work page 2022
-
[42]
A. Kar, M. G. Christensen, et al., Fractional-order hyperbolic tangent based adaptive algorithm for feedback control in hearing aids, in: ICASSP 2025-2025 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), IEEE, 2025, pp. 1–5
work page 2025
-
[43]
V . C. Gogineni, S. P. Talebi, S. Werner, D. P. Mandic, Fractional-order correntropy adaptive filters for distributed processing of 𝛼-stable signals, IEEE Signal Processing Letters 27 (2020) 1884–1888
work page 2020
- [44]
-
[45]
Y. Luo, J. Yang, Q. Zhang, C. Wang, A fractional-order adaptive filtering algorithm in impulsive noise environments, IEEE Transactions on Circuits and Systems II: Express Briefs 68 (10) (2021) 3376–3380
work page 2021
-
[46]
O. M. Abdelrhman, S. Li, Fractional-order maximum versoria criterion algorithms for 𝛼-stable environment, IEEE Transactions on Circuits and Systems II: Express Briefs (2024)
work page 2024
-
[47]
M. Cui, Y. Jiang, D. Lin, S. Wang, F. He, Enhanced batch adaptive filter based on fractional-order generalized cauchy kernel loss, IEEE Signal Processing Letters (2025)
work page 2025
- [48]
-
[49]
S. S. Haykin, Adaptive filter theory, Pearson Education India, 2002
work page 2002
-
[50]
C. F. Van Loan, The ubiquitous kronecker product, Journal of computational and applied mathematics 123 (1-2) (2000) 85–100
work page 2000
-
[51]
C. Paleologu, J. Benesty, S. Ciochin, Linear system identification based on a kronecker product decomposition, IEEE/ACM Transactions on Audio, Speech, and Language Processing 26 (10) (2018) 1793–1808
work page 2018
-
[52]
S. S. Bhattacharjee, N. V . George, Nearest kronecker product decomposition based normalized least mean square algorithm, in: ICASSP 2020 - 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2020, pp. 476–480
work page 2020
-
[53]
C. Elisei-Iliescu, C. Paleologu, J. Benesty, S. Ciochina, A recursive least-squares algorithm based on the nearest kronecker product decomposition, in: ICASSP 2019 - 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2019, pp. 4843–4847. J. Ye et al.: Preprint submitted to Elsevier Page 27 of 28
work page 2019
-
[54]
S. S. Bhattacharjee, K. Kumar, N. V . George, Nearest kronecker product decomposition based generalized maximum correntropy and generalized hyperbolic secant robust adaptive filters, IEEE Signal Processing Letters 27 (2020) 1525–1529
work page 2020
-
[55]
E. V . Kuhn, C. A. Pitz, M. V . Matsuo, K. J. Bakri, R. Seara, J. Benesty, A kronecker product clms algorithm for adaptive beamforming, Digital Signal Processing 111 (2021) 102968
work page 2021
-
[56]
L.-M. Dogariu, C. Paleologu, J. Benesty, S. Ciochin, An efficient kalman filter for the identification of low-rank systems, Signal Processing 166 (2020) 107239
work page 2020
-
[57]
S. S. Bhattacharjee, N. V . George, Nearest kronecker product decomposition based linear-in-the-parameters nonlinear filters, IEEE/ACM Transactions on Audio, Speech, and Language Processing 29 (2021) 2111–2122
work page 2021
- [58]
-
[59]
S. M. Kuo, D. R. Morgan, Active noise control systems, Vol. 4, Wiley, New York, 1996
work page 1996
-
[60]
Elliott, Signal processing for active control, Elsevier, 2000
S. Elliott, Signal processing for active control, Elsevier, 2000
work page 2000
- [61]
-
[62]
N. C. Kurian, K. Patel, N. V . George, Robust active noise control: An information theoretic learning approach, Applied Acoustics 117 (2017) 180–184
work page 2017
-
[63]
Y. Zhu, H. Zhao, X. Zeng, B. Chen, Robust generalized maximum correntropy criterion algorithms for active noise control, IEEE/ACM Transactions on Audio, Speech, and Language Processing 28 (2020) 1282–1292
work page 2020
-
[64]
Y. Zhou, H. Zhao, D. Liu, H. Zhang, Combined step size affine-projection-like exponential hyperbolic sine algorithm for robust active noise control, Mechanical Systems and Signal Processing 221 (2024) 111716
work page 2024
-
[65]
L. Li, S. Wang, S. S. Bhattacharjee, J. R. Jensen, M. G. Christensen, Nearest kronecker product decomposition based multichannel filtered-x affine projection algorithm for active noise control, Mechanical Systems and Signal Processing 224 (2025) 112055
work page 2025
-
[66]
C. Elisei-Iliescu, C. Paleologu, J. Benesty, C. Stanciu, C. Anghel, S. Ciochină, Recursive least-squares algorithms for the identification of low-rank systems, IEEE/ACM Transactions on Audio, Speech, and Language Processing 27 (5) (2019) 903–918
work page 2019
-
[67]
G. H. Golub, C. F. Van Loan, Matrix computations, JHU press, 2013
work page 2013
- [68]
-
[69]
L. Li, Y. Zheng, Z. Guo, G. Qian, S. Wang, Steady-state performance analysis of the nearest kronecker product decomposition based lms adaptive algorithm, IEEE Signal Processing Letters 32 (2025) 1995–1999
work page 2025
-
[70]
T. Y. Al-Naffouri, A. H. Sayed, Adaptive filters with error nonlinearities: Mean-square analysis and optimum design, EURASIP journal on advances in signal processing 2001 (1) (2001) 192–205
work page 2001
-
[71]
D. Morgan, An analysis of multiple correlation cancellation loops with a filter in the auxiliary path, IEEE Transactions on Acoustics, Speech, and Signal Processing 28 (4) (1980) 454–467
work page 1980
-
[72]
Digital network echo cancellers, ITU-T Recommendations G.168 (2002)
work page 2002
-
[73]
H. Zhao, Y. Yu, S. Gao, X. Zeng, Z. He, Memory proportionate apa with individual activation factors for acoustic echo cancellation, IEEE/ACM Transactions on Audio, Speech, and Language Processing 22 (6) (2014) 1047–1055
work page 2014
-
[74]
L. Wu, H. He, X. Qiu, An active impulsive noise control algorithm with logarithmic transformation, IEEE Transactions on Audio, Speech, and Language Processing 19 (4) (2011) 1041–1044
work page 2011
-
[75]
Y. Tang, H. Zhang, Y. Zhang, Stability guaranteed active noise control: Algorithms and applications, IEEE Transactions on Control Systems Technology 31 (4) (2023) 1720–1732
work page 2023
-
[76]
Y.-R. Chien, C.-H. Yu, H.-W. Tsao, Affine-projection-like maximum correntropy criteria algorithm for robust active noise control, IEEE/ACM Transactions on Audio, Speech, and Language Processing 30 (2022) 2255–2266
work page 2022
-
[77]
D. Morgan, An analysis of multiple correlation cancellation loops with a filter in the auxiliary path, IEEE Transactions on Acoustics, Speech, and Signal Processing 28 (4) (2003) 454–467
work page 2003
-
[78]
Y. Zhou, H. Zhao, D. Liu, X. Guo, Distributed active noise control robust to impulsive interference, IEEE Sensors Journal (2025). J. Ye et al.: Preprint submitted to Elsevier Page 28 of 28
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.