Sandbox-Enabled Digital Twin for Cyber-Physical Systems
Pith reviewed 2026-06-27 02:58 UTC · model grok-4.3
The pith
A Linux sandbox digital twin runs unmodified CPS controller binaries while capturing time-synchronized side channels and plant states to correlate execution with physical events.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
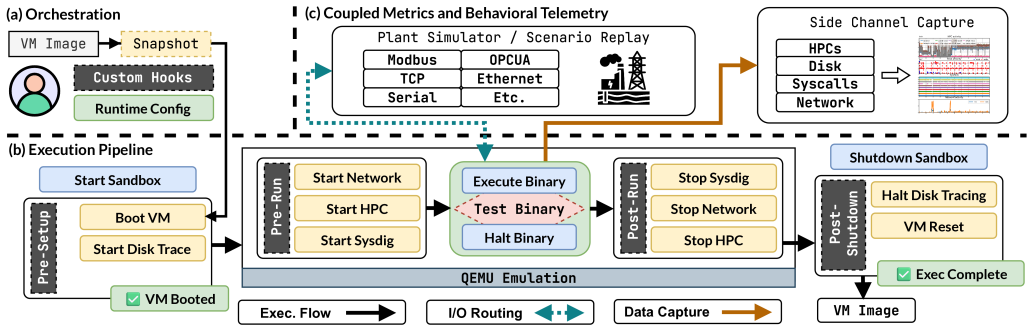
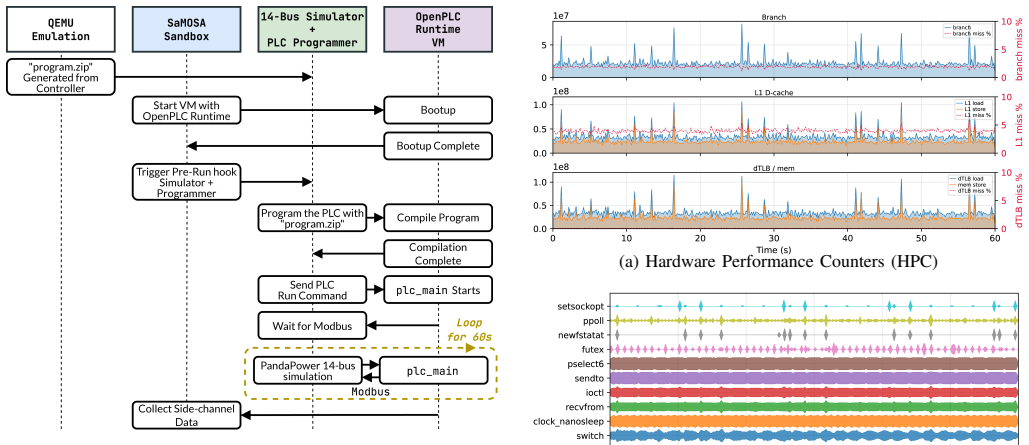
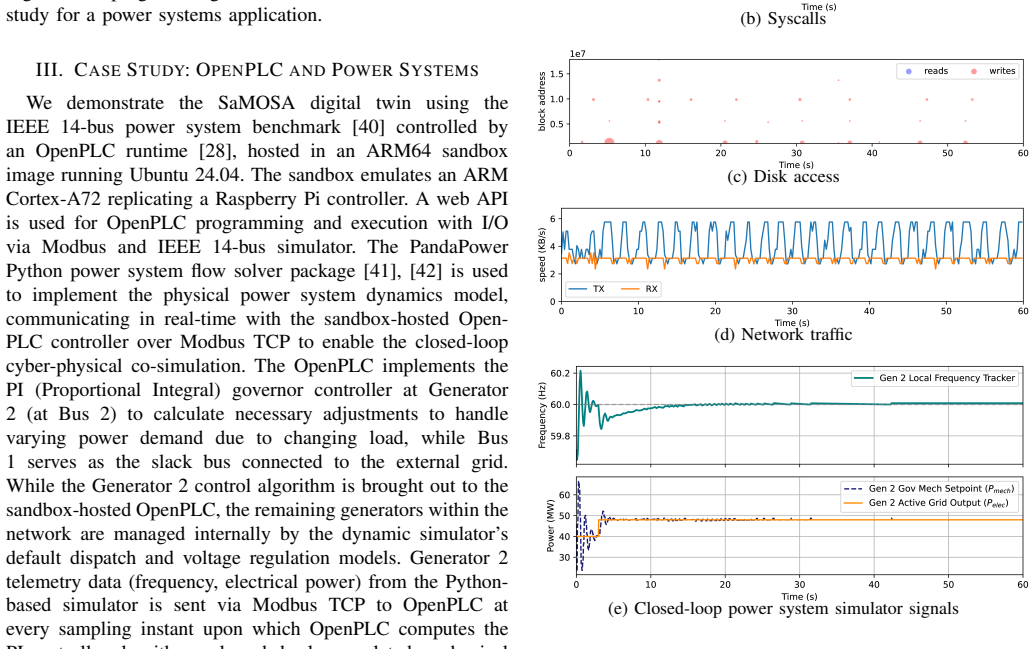
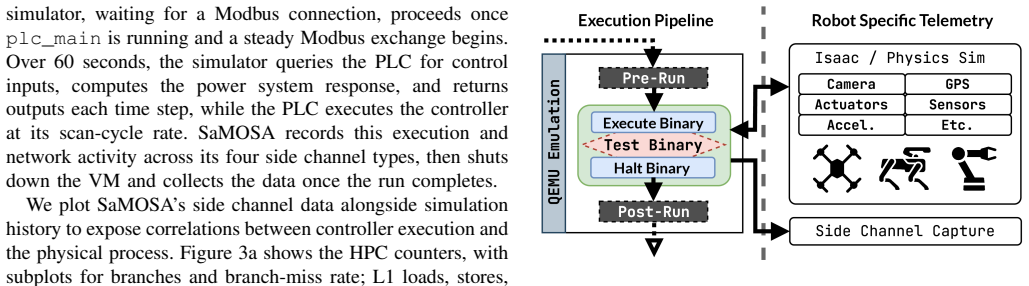
The framework hosts unmodified controller binaries in a Linux sandbox (SaMOSA) with its I/O rerouted to an external plant simulator. The framework captures four time-synchronized side channels (hardware performance counters, system calls, disk activity, network activity) alongside plant state and provides orchestration hooks for automated, repeatable, parameterized runs. The synchronized traces correlate internal controller execution with plant events, providing an observability foundation for online testing, coverage analysis, and vulnerability detection. The approach is shown on an OpenPLC runtime controlling a Modbus-connected IEEE 14-bus power system.
What carries the argument
SaMOSA, a sandbox that runs unmodified controller binaries with I/O rerouted to a plant simulator while recording four time-synchronized side channels together with plant state.
Load-bearing premise
Running the controller binary inside the Linux sandbox with I/O rerouting preserves the original timing and behavior sufficiently to avoid masking real vulnerabilities or introducing artifacts that invalidate side-channel correlations with plant state.
What would settle it
A demonstration that the same plant input sequence produces measurably different side-channel traces or fails to trigger a known plant-state-dependent vulnerability inside the sandbox compared with bare-metal execution on the real controller.
Figures
read the original abstract
Firmware/software in cyber-physical system (CPS) embedded devices/controllers can have vulnerabilities stemming from multiple sources such as weak security practices, outdated libraries, or supply chain attacks that induce adversarial effects under plant state-based triggers. However, pre-deployment validation of CPS controllers typically relies on digital twins that model controller logic as a black box. On the other hand, side channel monitoring and anomaly detection of CPS controller firmware/software is complementary, but is typically exercised with synthetic inputs or under specific CPS operational profiles and does not simultaneously track software execution and CPS plant evolution. To bridge this gap, we present a closed-loop digital twin framework that hosts unmodified controller binaries in a Linux sandbox (SaMOSA) with its I/O rerouted to an external plant simulator. The framework captures four time-synchronized side channels (hardware performance counters, system calls, disk activity, network activity) alongside plant state and provides orchestration hooks for automated, repeatable, parameterized runs. We demonstrate the framework on an OpenPLC runtime controlling a Modbus-connected IEEE 14-bus power system, and also briefly discuss application to robotics systems. The synchronized traces correlate internal controller execution with plant events, providing an observability foundation for online testing, coverage analysis, and vulnerability detection.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a closed-loop digital twin framework (SaMOSA) that executes unmodified CPS controller binaries inside a Linux sandbox with I/O rerouted to an external plant simulator. It captures four time-synchronized side channels (hardware performance counters, system calls, disk activity, network activity) together with plant state and provides orchestration for repeatable runs. The framework is demonstrated on an OpenPLC runtime controlling a Modbus-connected IEEE 14-bus power system, with the claim that the resulting traces enable observability for online testing, coverage analysis, and vulnerability detection.
Significance. If the sandboxed execution preserves timing and side-channel fidelity, the framework would offer a practical bridge between digital-twin plant simulation and low-level software observability that is currently missing from most CPS security toolchains. The approach is notable for targeting unmodified binaries and for explicitly synchronizing software-level traces with physical-state evolution.
major comments (2)
- [Abstract] Abstract: The central claim that the synchronized traces 'provide an observability foundation for ... vulnerability detection' is load-bearing on the assumption that Linux sandbox I/O rerouting and containerization preserve original controller timing and side-channel statistics; however, the manuscript supplies no quantitative comparison of execution timing, interrupt latency, or side-channel distributions between sandboxed and native runs on the target hardware.
- [Abstract] Abstract / Demonstration: The OpenPLC + IEEE 14-bus demonstration is described at the level of a working prototype without reported error metrics, timing jitter statistics, correlation coefficients between side channels and plant events, or any ablation showing that sandbox artifacts do not mask or fabricate plant-triggered behaviors.
minor comments (2)
- [Abstract] The abstract would benefit from an explicit enumeration of the four side channels and a one-sentence statement of how synchronization is achieved.
- A brief related-work paragraph contrasting SaMOSA with existing hardware-in-the-loop digital twins and with standalone side-channel monitors would help situate the contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for quantitative validation of sandbox fidelity and demonstration metrics. We address each major comment below and will incorporate the requested analyses in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the synchronized traces 'provide an observability foundation for ... vulnerability detection' is load-bearing on the assumption that Linux sandbox I/O rerouting and containerization preserve original controller timing and side-channel statistics; however, the manuscript supplies no quantitative comparison of execution timing, interrupt latency, or side-channel distributions between sandboxed and native runs on the target hardware.
Authors: We agree that direct quantitative comparisons are necessary to support the observability claims. The current manuscript focuses on framework design and integration but does not include benchmarks of timing preservation or side-channel fidelity. In revision, we will add measurements comparing execution timing, interrupt latency, and side-channel distributions (HPC, syscalls, disk, network) between sandboxed and native runs on equivalent hardware, including statistical tests for distribution similarity. revision: yes
-
Referee: [Abstract] Abstract / Demonstration: The OpenPLC + IEEE 14-bus demonstration is described at the level of a working prototype without reported error metrics, timing jitter statistics, correlation coefficients between side channels and plant events, or any ablation showing that sandbox artifacts do not mask or fabricate plant-triggered behaviors.
Authors: The demonstration currently illustrates the end-to-end workflow and trace synchronization but lacks the requested quantitative metrics. We will expand this section to report timing jitter statistics, error metrics for plant state synchronization, Pearson/Spearman correlations between side-channel events and plant state changes, and ablation experiments (e.g., comparing runs with/without specific sandbox features) to verify that no spurious plant-triggered behaviors are introduced or masked. revision: yes
Circularity Check
No circularity; framework description is self-contained
full rationale
The paper presents a systems engineering framework (SaMOSA sandbox with I/O rerouting, side-channel capture, and plant simulator integration) without any equations, fitted parameters, predictions, or mathematical derivations. The central claim—that synchronized traces provide an observability foundation—rests on the architectural description and a concrete demonstration (OpenPLC on IEEE 14-bus), not on any self-referential definitions, self-citation chains, or renamings that reduce to inputs. No load-bearing steps match the enumerated circularity patterns; the contribution is externally falsifiable via implementation and timing measurements.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Cybersecurity for control systems: A process-aware perspective,
F. Khorrami, P. Krishnamurthy, and R. Karri, “Cybersecurity for control systems: A process-aware perspective,”IEEE Design & Test, vol. 33, no. 5, pp. 75–83, 2016
2016
-
[2]
The Stuxnet computer worm: Harbinger of an emerging warfare capability,
P. K. Kerr, J. W. Rollins, and C. A. Theohary, “The Stuxnet computer worm: Harbinger of an emerging warfare capability,” Congressional Research Service, Tech. Rep. R41524. [Online]. Available: https://ww w.congress.gov/crs external products/R/PDF/R41524/R41524.3.pdf
-
[3]
Vulnerabilities and attacks against industrial control systems and critical infrastructures,
G. M. Makrakis, C. Kolias, G. Kambourakis, C. Rieger, and J. Benjamin, “Vulnerabilities and attacks against industrial control systems and critical infrastructures,”CoRR, vol. abs/2109.03945, 2021. [Online]. Available: https://arxiv.org/abs/2109.03945
arXiv 2021
-
[4]
Kinsing v2,
AQUASEC, “Kinsing v2,” https://www.aquasec.com/blog/threat-alert-k insing-malware-container-vulnerability/
-
[5]
Kinsing saltstack,
Redcanary, “Kinsing saltstack,” https://redcanary.com/blog/threat-intelli gence/kinsing-malware-citrix-saltstack/
-
[6]
Ghost in the PLC: designing an unde- tectable programmable logic controller rootkit via pin control attack,
A. Abbasi and M. Hashemi, “Ghost in the PLC: designing an unde- tectable programmable logic controller rootkit via pin control attack,” Black Hat Europe, pp. 1–35, 2016
2016
-
[7]
PLC-blaster: A worm living solely in the PLC,
R. Spenneberg, M. Br ¨uggemann, and H. Schwartke, “PLC-blaster: A worm living solely in the PLC,”Black Hat Asia, vol. 16, pp. 1–16, 2016
2016
-
[8]
On ladder logic bombs in industrial control systems,
N. Govil, A. Agrawal, and N. O. Tippenhauer, “On ladder logic bombs in industrial control systems,” inInternational Workshop on the Security of Industrial Control Systems and Cyber-Physical Systems. Springer, 2017, pp. 110–126
2017
-
[9]
A large-scale analysis of the security of embedded firmwares,
A. Costin, J. Zaddach, A. Francillon, and D. Balzarotti, “A large-scale analysis of the security of embedded firmwares,” inProceedings of the 23rd USENIX Conference on Security Symposium, ser. SEC’14. USA: USENIX Association, 2014, p. 95–110
2014
-
[10]
P2IM: Scalable and hardware- independent firmware testing via automatic peripheral interface modeling,
B. Feng, A. Mera, and L. Lu, “P2IM: Scalable and hardware- independent firmware testing via automatic peripheral interface modeling,” in29th USENIX Security Symposium (USENIX Security 20). USENIX Association, 2020, pp. 1237–1254. [Online]. Available: https://www.usenix.org/conference/usenixsecurity20/presentation/feng
2020
-
[11]
Firmae: Towards large-scale emulation of iot firmware for dynamic analysis,
M. Kim, D. Kim, E. Kim, S. Kim, Y . Jang, and Y . Kim, “FirmAE: towards large-scale emulation of IoT firmware for dynamic analysis,” ser. ACSAC ’20. New York, NY , USA: Association for Computing Machinery, 2020, p. 733–745. [Online]. Available: https://doi.org/10.1145/3427228.3427294
-
[12]
Everything you always wanted to know about embedded trace,
T. B. Preußer, S. Gautham, A. D. Rajagopala, C. R. Elks, and A. Weiss, “Everything you always wanted to know about embedded trace,”Com- puter, vol. 55, no. 2, pp. 34–43, 2022
2022
-
[13]
Challenges in firmware re-hosting, emulation, and analysis,
C. Wright, W. A. Moeglein, S. Bagchi, M. Kulkarni, and A. A. Clements, “Challenges in firmware re-hosting, emulation, and analysis,” ACM Comput. Surv., vol. 54, no. 1, Jan. 2021. [Online]. Available: https://doi.org/10.1145/3423167
-
[14]
Digital twins for cyber-physical systems security: State of the art and outlook,
M. Eckhart and A. Ekelhart, “Digital twins for cyber-physical systems security: State of the art and outlook,” inSecurity and Quality in Cyber- Physical Systems Engineering. Cham: Springer, 2019, pp. 383–412. [Online]. Available: https://doi.org/10.1007/978-3-030-25312-7 14
-
[15]
Malicious firmware detection with hardware performance counters,
X. Wang, C. Konstantinou, M. Maniatakos, R. Karri, S. Lee, P. Robison, P. Stergiou, and S. Kim, “Malicious firmware detection with hardware performance counters,”IEEE Transactions on Multi-Scale Computing Systems, vol. 2, no. 3, pp. 160–173, 2016
2016
-
[16]
Anomaly detection in real- time multi-threaded processes using hardware performance counters,
P. Krishnamurthy, R. Karri, and F. Khorrami, “Anomaly detection in real- time multi-threaded processes using hardware performance counters,” IEEE Transactions on Information Forensics and Security, vol. 15, pp. 666–680, 2020
2020
-
[17]
Detecting hardware Trojans in PCBs using side channel loopbacks,
H. Pearce, V . R. Surabhi, P. Krishnamurthy, J. Trujillo, R. Karri, and F. Khorrami, “Detecting hardware Trojans in PCBs using side channel loopbacks,”IEEE Transactions on Very Large Scale Integration (VLSI) Systems, vol. 30, no. 7, pp. 926–937, 2022
2022
-
[18]
SaMOSA: sandbox for malware orchestration and side-channel analysis,
M. Udeshi, V . S. C. Putrevu, P. Krishnamurthy, R. Karri, and F. Khor- rami, “SaMOSA: sandbox for malware orchestration and side-channel analysis,”arXiv preprint arXiv:2508.14261, 2025
arXiv 2025
-
[19]
Multi-modal side channel data driven golden-free detection of software and firmware Trojans,
P. Krishnamurthy, V . R. Surabhi, H. Pearce, R. Karri, and F. Khorrami, “Multi-modal side channel data driven golden-free detection of software and firmware Trojans,”IEEE Transactions on Dependable and Secure Computing, vol. 20, no. 6, pp. 4664–4677, 2023
2023
-
[20]
MUDDLE: multi-modal dynamic detector loopback evaluator to expose Trojans in zero-trust PCB systems,
P. Krishnamurthy, H. Pearce, V . R. Surabhi, J. Trujillo, R. Karri, and F. Khorrami, “MUDDLE: multi-modal dynamic detector loopback evaluator to expose Trojans in zero-trust PCB systems,”IEEE Micro, 2024, early access available on-line on IEEE
2024
-
[21]
F. Khorrami, R. Karri, and P. Krishnamurthy, “Real-time multi-modal subcomponent-level measurements for trustworthy system monitoring and malware detection,”arXiv preprint arXiv:2501.13081, 2025
arXiv 2025
-
[22]
Tamper-proof network traffic measurements on a nic for intrusion detection,
M. Udeshi, P. Krishnamurthy, R. Karri, and F. Khorrami, “Tamper-proof network traffic measurements on a nic for intrusion detection,”IEEE Transactions on Network and Service Management, vol. 22, no. 2, pp. 2214–2224, 2024
2024
-
[23]
Tracking real- time anomalies in cyber-physical systems through dynamic behavioral analysis,
P. Krishnamurthy, A. Rasteh, R. Karri, and F. Khorrami, “Tracking real- time anomalies in cyber-physical systems through dynamic behavioral analysis,”Journal of Cybersecurity and Privacy, vol. 6, no. 2, 2026
2026
-
[24]
Avatar: A framework to support dynamic security analysis of embedded systems’ firmwares,
J. Zaddach, L. Bruno, A. Francillon, and D. Balzarotti, “Avatar: A framework to support dynamic security analysis of embedded systems’ firmwares,” inNDSS 2014, Network and Distributed System Security Symposium, 23-26 February 2014, San Diego, USA, ISOC, Ed., 2014
2014
-
[25]
Towards automated dynamic analysis for linux-based embedded firmware
D. D. Chen, M. Woo, D. Brumley, and M. Egele, “Towards automated dynamic analysis for linux-based embedded firmware.” inNDSS, 2016
2016
-
[26]
HALucinator: Firmware re-hosting through abstraction layer emulation,
A. A. Clements, E. Gustafson, T. Scharnowski, P. Grosen, D. Fritz, C. Kruegel, G. Vigna, S. Bagchi, and M. Payer, “HALucinator: Firmware re-hosting through abstraction layer emulation,” in29th USENIX Secu- rity Symposium (USENIX Security 20). USENIX Association, Aug. 2020, pp. 1201–1218
2020
-
[27]
OpenPLC: an open source alternative to automation,
T. R. Alves, M. Buratto, F. M. de Souza, and T. V . Rodrigues, “OpenPLC: an open source alternative to automation,” inIEEE Global Humanitarian Technology Conference (GHTC 2014), 2014
2014
-
[28]
OpenPLC – Open-source PLC programming environment and run-time for industrial automation,
Autonomy, “OpenPLC – Open-source PLC programming environment and run-time for industrial automation,” https://autonomylogic.com. [29]MODBUS Application Protocol Specification, V1.1b3 ed., Modbus Organization. [Online]. Available: https://www.modbus.org/file/secure /modbusprotocolspecification.pdf [30]IEC 61131-3:2025: Programming languages, International ...
2025
-
[29]
ROS - Robot Operating System,
“ROS - Robot Operating System,” https://www.ros.org
-
[30]
Robot Operating System 2: Design, architecture, and uses in the wild,
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, and W. Woodall, “Robot Operating System 2: Design, architecture, and uses in the wild,” Science Robotics, vol. 7, no. 66, p. eabm6074, 2022. [Online]. Available: https://www.science.org/doi/abs/10.1126/scirobotics.abm6074
-
[31]
Isaac Sim,
NVIDIA, “Isaac Sim,” https://github.com/isaac-sim/IsaacSim
-
[32]
Dynamic malware analysis in the modern era—a state of the art survey,
O. Or-Meir, N. Nissim, Y . Elovici, and L. Rokach, “Dynamic malware analysis in the modern era—a state of the art survey,” ACM Comput. Surv., vol. 52, no. 5, Sep. 2019. [Online]. Available: https://doi.org/10.1145/3329786
-
[33]
Towards security-aware virtual environments for digital twins,
M. Eckhart and A. Ekelhart, “Towards security-aware virtual environments for digital twins,” inProceedings of the 4th ACM Workshop on Cyber-Physical System Security, ser. CPSS ’18. New York, NY , USA: Association for Computing Machinery, 2018, p. 61–72. [Online]. Available: https://doi.org/10.1145/3198458.3198464
-
[34]
A digital twin based industrial automation and control system security architecture,
C. Gehrmann and M. Gunnarsson, “A digital twin based industrial automation and control system security architecture,”IEEE Transactions on Industrial Informatics, vol. 16, no. 1, pp. 669–680, 2020
2020
-
[35]
QEMU Emulator,
QEMU, “QEMU Emulator,” https://www.qemu.org/docs/master/about/i ndex.html
-
[36]
Sysdig, “Sysdig,” https://github.com/draios/sysdig
-
[37]
FakeNet-NG,
Mandiant, “FakeNet-NG,” https://github.com/mandiant/flare-fakenet-ng
-
[38]
IEEE 14 Bus System,
PSCAD, “IEEE 14 Bus System,” Knowledge Base article, Feb. 2022. [Online]. Available: https://www.pscad.com/knowledge-base/article/26
2022
-
[39]
pandapower — an open-source python tool for convenient modeling, analysis, and optimization of electric power systems,
L. Thurner, A. Scheidler, F. Sch ¨afer, J. Menke, J. Dollichon, F. Meier, S. Meinecke, and M. Braun, “pandapower — an open-source python tool for convenient modeling, analysis, and optimization of electric power systems,”IEEE Transactions on Power Systems, vol. 33, no. 6, pp. 6510– 6521, Nov 2018
2018
-
[40]
pandapower open source tool for power system modeling, analysis and optimization,
pandapower, “pandapower open source tool for power system modeling, analysis and optimization,” https://www.pandapower.org/
-
[41]
Smart malware that uses leaked control data of robotic applications: The case of Raven-II surgical robots,
K. Chung, X. Li, P. Tang, Z. Zhu, Z. T. Kalbarczyk, R. K. Iyer, and T. Kesavadas, “Smart malware that uses leaked control data of robotic applications: The case of Raven-II surgical robots,” in22nd International Symposium on Research in Attacks, Intrusions and Defenses. USENIX Association, Sep. 2019, pp. 337–351
2019
-
[42]
Checking consistency of robot software ar- chitectures in ros,
T. Witte and M. Tichy, “Checking consistency of robot software ar- chitectures in ros,” inInternational Workshop on Robotics Software Engineering, ser. RoSE ’18. ACM, 2018, p. 1–8
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.