Neuro-Symbolic Safety Guidance for Vision-Language-Action Models via Constrained Flow Matching
Pith reviewed 2026-07-03 20:04 UTC · model grok-4.3
The pith
Safety guidance in flow matching VLAs uses constrained optimization during denoising to predict and avoid collisions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
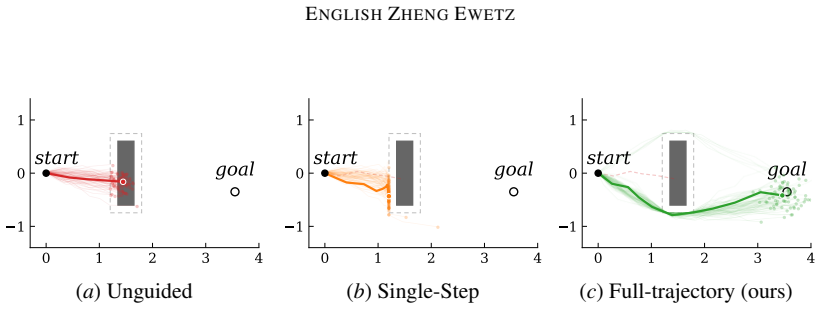
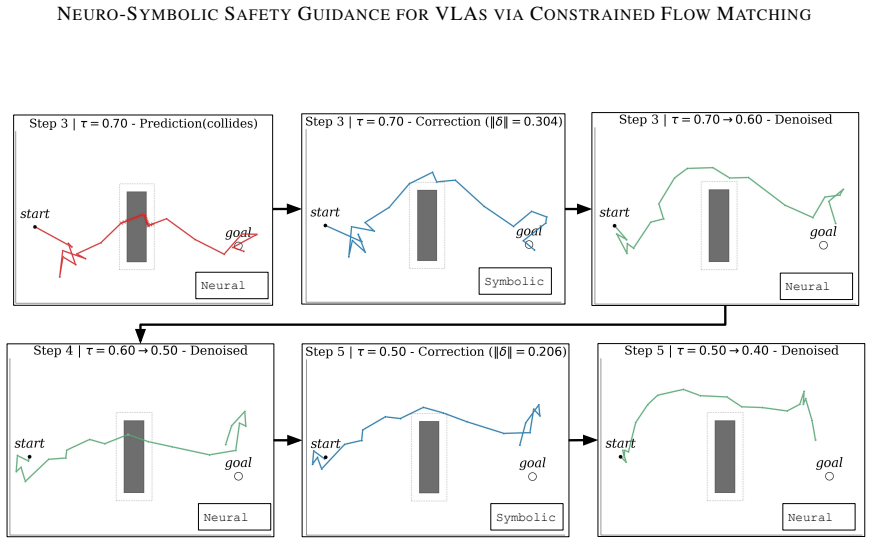
By formulating safety enforcement as a minimum-norm constrained optimization problem that corrects safety violations during the denoising process of noisy intermediate trajectory predictions, the method enables predictive collision avoidance in flow matching based VLAs rather than reactive intervention.
What carries the argument
Minimum-norm constrained optimization applied at each denoising step to correct safety violations in predicted trajectories.
If this is right
- Anticipates collisions before they become unavoidable by analyzing full trajectories.
- Achieves 82.8% collision avoidance and 81.6% task success on SafeLIBERO.
- Shows largest gains on long-horizon tasks due to reduced compounding distribution shift.
- Interleaves symbolic constraint satisfaction with neural trajectory generation.
Where Pith is reading between the lines
- Similar guidance could be applied to other iterative generative processes beyond flow matching.
- The method may extend to safety constraints other than collision avoidance in robotics.
- Real-world deployment of VLAs could become more feasible with this predictive safety layer.
Load-bearing premise
The minimum-norm constrained optimization can be solved at each denoising step without substantially changing the final task performance.
What would settle it
A test case where applying the corrections at denoising steps causes a measurable drop in task success rate compared to the uncorrected model.
Figures
read the original abstract
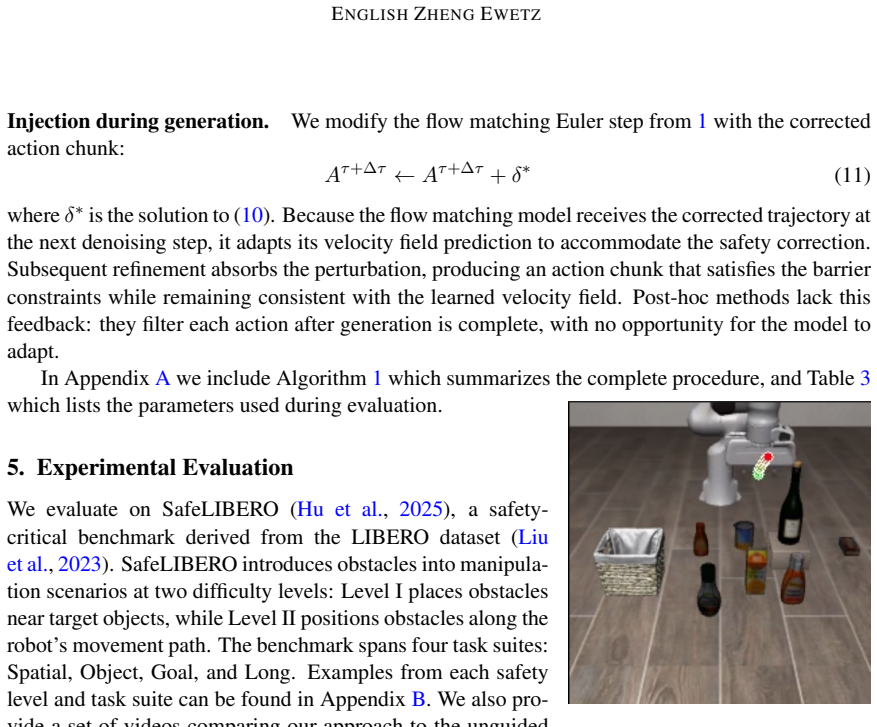
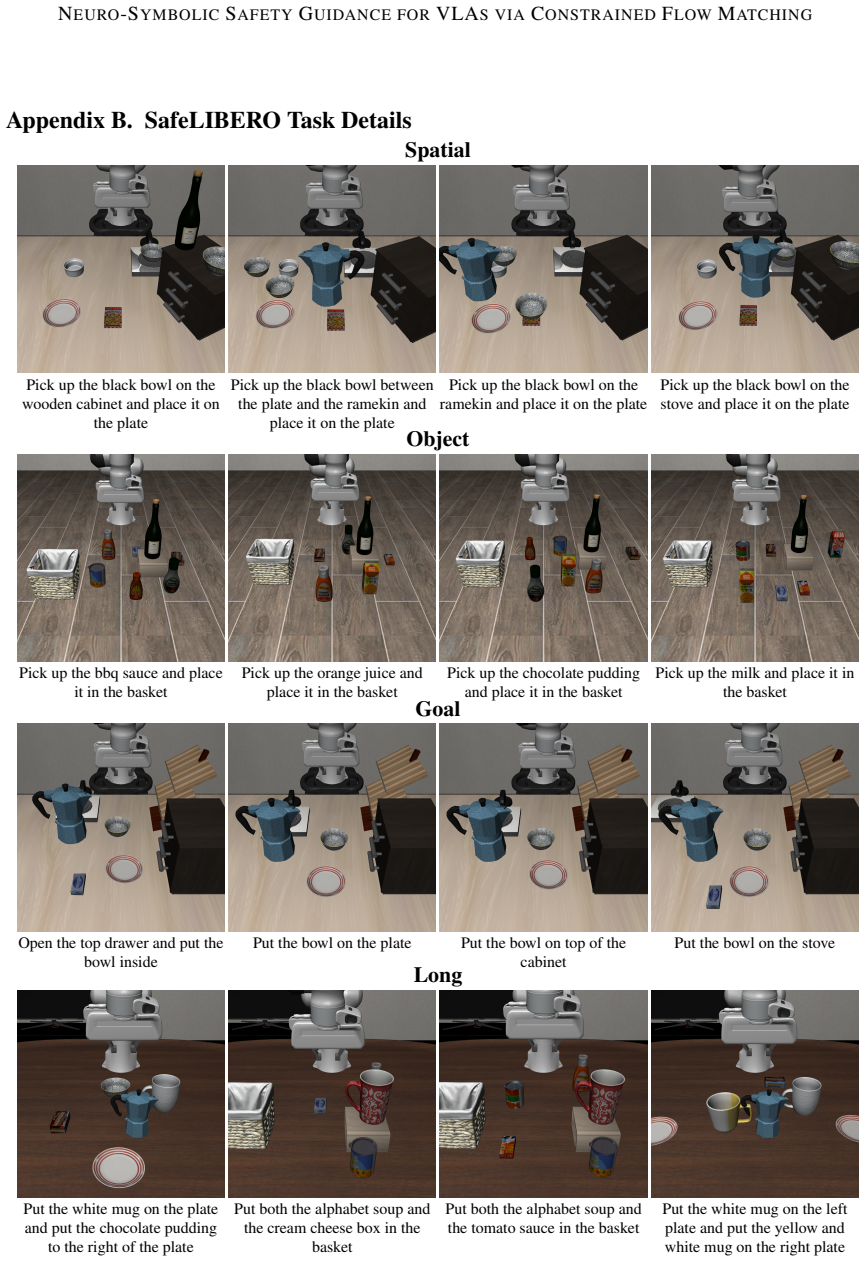
Vision-Language-Action (VLA) models have demonstrated promising generalization capabilities across robotic manipulation tasks, yet their real-world deployment remains limited by the lack of effective safety measures. Specifically, existing safety measures only prevent collisions caused by the robot's next action. In this paper, we propose a neuro-symbolic safety guidance mechanism for flow matching based VLAs that enables predictive collision avoidance. Flow matching based VLAs determine the next actions by predicting a trajectory (a sequence of actions) through an iterative neural flow matching process. Our method formulates safety enforcement as a minimum-norm constrained optimization problem that corrects safety violations during the denoising process of noisy intermediate trajectory predictions. By analyzing predicted trajectories and applying corrections during iterative denoising, our approach anticipates collisions before they become unavoidable. This interleaving of symbolic constraint satisfaction with neural trajectory generation enables predictive collision avoidance rather than reactive intervention. On the SafeLIBERO benchmark, our method achieves 82.8% collision avoidance and 81.6% task success, a 6.3% and 19.8% improvement respectively over single-step methods, with the largest gains on long-horizon tasks where compounding distribution shift is most pronounced. Video demonstrations of our approach are included on our project page at https://willenglish.tech/SafetyGuidedFlowMatching/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a neuro-symbolic safety guidance mechanism for flow-matching Vision-Language-Action (VLA) models. Safety enforcement is cast as a minimum-norm constrained optimization problem solved at each step of the iterative denoising process to correct predicted collisions in intermediate trajectory predictions. This enables predictive rather than reactive avoidance. On the SafeLIBERO benchmark the method reports 82.8% collision avoidance and 81.6% task success, improvements of 6.3% and 19.8% over single-step baselines, with the largest gains on long-horizon tasks.
Significance. If the central claim is substantiated, the work would offer a practical route to safer deployment of generative VLAs by interleaving symbolic constraint satisfaction with neural trajectory generation. The reported gains on long-horizon tasks suggest the approach can mitigate compounding distribution shift, a persistent obstacle for real-world robotic manipulation. The neuro-symbolic framing may also serve as a template for other constrained generative models in robotics.
major comments (2)
- [Abstract / Evaluation] The manuscript provides no derivation, closed-form solution, or ablation demonstrating that the feasible set under the safety constraints still contains high-probability task-satisfying trajectories. This premise is load-bearing for the reported 19.8% task-success gain (and the larger long-horizon improvements), yet the abstract and evaluation supply only external benchmark numbers without internal analysis of how the projection affects the learned distribution.
- [Abstract] No implementation details, ablation studies, or statistical tests are reported for the constrained optimization step or its effect on the final action distribution. The central claim that minimum-norm corrections eliminate violations while leaving task performance essentially unchanged therefore rests on an unexamined assumption.
minor comments (1)
- The project page is referenced for video demonstrations; the manuscript would be strengthened by a brief description of the exact constraint formulation and solver used at each denoising step.
Simulated Author's Rebuttal
We thank the referee for the insightful comments highlighting the need for deeper analysis of the constrained optimization. We address each point below and will revise the manuscript to incorporate additional derivations, ablations, and implementation details.
read point-by-point responses
-
Referee: [Abstract / Evaluation] The manuscript provides no derivation, closed-form solution, or ablation demonstrating that the feasible set under the safety constraints still contains high-probability task-satisfying trajectories. This premise is load-bearing for the reported 19.8% task-success gain (and the larger long-horizon improvements), yet the abstract and evaluation supply only external benchmark numbers without internal analysis of how the projection affects the learned distribution.
Authors: We acknowledge this gap in the current manuscript. While the benchmark results on SafeLIBERO demonstrate overall gains, particularly on long-horizon tasks, we agree that an internal analysis of how the minimum-norm projection affects the learned flow distribution is needed to substantiate that high-probability task-satisfying trajectories remain feasible. In the revision, we will add a dedicated analysis section with sampling experiments comparing constrained vs. unconstrained trajectory distributions and their task success rates. revision: yes
-
Referee: [Abstract] No implementation details, ablation studies, or statistical tests are reported for the constrained optimization step or its effect on the final action distribution. The central claim that minimum-norm corrections eliminate violations while leaving task performance essentially unchanged therefore rests on an unexamined assumption.
Authors: The current manuscript emphasizes the overall method and external benchmark outcomes. We will expand the evaluation section in the revision to include: (i) implementation details of the constrained solver (e.g., optimization library, convergence criteria, and runtime), (ii) ablation studies on constraint weighting and its impact on action distributions, and (iii) statistical significance tests on the performance differences. This will directly address the assumption regarding preservation of task performance. revision: yes
Circularity Check
No circularity: empirical benchmark results independent of internal definitions
full rationale
The paper's core contribution is an empirical method that interleaves symbolic min-norm constrained optimization with neural flow-matching denoising to achieve predictive collision avoidance. All reported metrics (82.8% collision avoidance, 81.6% task success on SafeLIBERO) are obtained from external benchmark evaluation against single-step baselines, not from quantities defined in terms of the method's own fitted parameters or self-referential equations. No self-citations, uniqueness theorems, or ansatzes are invoked as load-bearing premises in the provided text; the derivation chain consists of a proposed formulation whose validity is tested externally rather than reduced to its inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Symbolic safety constraints can be expressed as a minimum-norm optimization problem that is solvable during each iterative denoising step while preserving downstream task success.
Reference graph
Works this paper leans on
-
[1]
Proceedings of The 7th Conference on Robot Learning , pages =
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control , author =. Proceedings of The 7th Conference on Robot Learning , pages =. 2023 , editor =
2023
-
[2]
Proceedings of The 8th Conference on Robot Learning , pages =
OpenVLA: An Open-Source Vision-Language-Action Model , author =. Proceedings of The 8th Conference on Robot Learning , pages =. 2025 , editor =
2025
-
[3]
2026 , eprint=
_0 : A Vision-Language-Action Flow Model for General Robot Control , author=. 2026 , eprint=
2026
-
[4]
Kevin Black and Noah Brown and James Darpinian and Karan Dhabalia and Danny Driess and Adnan Esmail and Michael Equi and Chelsea Finn and Niccolo Fusai and Manuel Y. Galliker and Dibya Ghosh and Lachy Groom and Karol Hausman and Brian Ichter and Szymon Jakubczak and Tim Jones and Liyiming Ke and Devin LeBlanc and Sergey Levine and Adrian Li-Bell and Mohit...
work page internal anchor Pith review Pith/arXiv arXiv
-
[5]
Borong Zhang and Yuhao Zhang and Jiaming Ji and Yingshan Lei and Josef Dai and Yuanpei Chen and Yaodong Yang , booktitle=. Safe. 2025 , url=
2025
-
[6]
and Coogan, Samuel and Egerstedt, Magnus and Notomista, Gennaro and Sreenath, Koushil and Tabuada, Paulo , booktitle=
Ames, Aaron D. and Coogan, Samuel and Egerstedt, Magnus and Notomista, Gennaro and Sreenath, Koushil and Tabuada, Paulo , booktitle=. Control Barrier Functions: Theory and Applications , year=
-
[7]
and Xu, Xiangru and Grizzle, Jessy W
Ames, Aaron D. and Xu, Xiangru and Grizzle, Jessy W. and Tabuada, Paulo , journal=. Control Barrier Function Based Quadratic Programs for Safety Critical Systems , year=
-
[8]
Proceedings of the 37th International Conference on Neural Information Processing Systems , articleno =
Liu, Bo and Zhu, Yifeng and Gao, Chongkai and Feng, Yihao and Liu, Qiang and Zhu, Yuke and Stone, Peter , title =. Proceedings of the 37th International Conference on Neural Information Processing Systems , articleno =. 2023 , publisher =
2023
-
[9]
and Nilsson, Nils J
Hart, Peter E. and Nilsson, Nils J. and Raphael, Bertram , journal=. A Formal Basis for the Heuristic Determination of Minimum Cost Paths , year=
-
[10]
Sampling-based Algorithms for Optimal Motion Planning
Sertac Karaman and Emilio Frazzoli , title =. CoRR , volume =. 2011 , url =. 1105.1186 , timestamp =
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[11]
2023 , eprint=
Flow Matching for Generative Modeling , author=. 2023 , eprint=
2023
-
[12]
2022 , eprint=
Classifier-Free Diffusion Guidance , author=. 2022 , eprint=
2022
-
[13]
2022 , eprint=
Planning with Diffusion for Flexible Behavior Synthesis , author=. 2022 , eprint=
2022
-
[14]
2026 , url=
SafeDec: Constrained Decoding for Safe Autoregressive Generalist Robot Policies , author=. 2026 , url=
2026
-
[15]
Forty-second International Conference on Machine Learning , year=
On the Guidance of Flow Matching , author=. Forty-second International Conference on Machine Learning , year=
-
[16]
ICML Workshop on New Frontiers in Learning, Control, and Dynamical Systems , year=
Trajectory Generation, Control, and Safety with Denoising Diffusion Probabilistic Models , author=. ICML Workshop on New Frontiers in Learning, Control, and Dynamical Systems , year=
-
[17]
Robotics: Science and Systems , year=
Discrete Control Barrier Functions for Safety-Critical Control of Discrete Systems with Application to Bipedal Robot Navigation , author=. Robotics: Science and Systems , year=
-
[18]
A Predictive Cooperative Collision Avoidance for Multi-Robot Systems Using Control Barrier Function , doi =
Li, Xiaoxiao and Sun, Zhirui and Wang, Hongpeng and Li, Shuai and Wang, Jiankun , year =. A Predictive Cooperative Collision Avoidance for Multi-Robot Systems Using Control Barrier Function , doi =
- [19]
-
[20]
arXiv preprint arXiv:2507.13231 , year=
VITA: Vision-to-Action Flow Matching Policy , author=. arXiv preprint arXiv:2507.13231 , year=
-
[21]
9th Annual Conference on Robot Learning , year=
ManiFlow: A General Robot Manipulation Policy via Consistency Flow Training , author=. 9th Annual Conference on Robot Learning , year=
-
[22]
2024 , eprint=
FlowPolicy: Enabling Fast and Robust 3D Flow-based Policy via Consistency Flow Matching for Robot Manipulation , author=. 2024 , eprint=
2024
-
[23]
and Belta, Calin , booktitle=
Cohen, Max H. and Belta, Calin , booktitle=. Approximate Optimal Control for Safety-Critical Systems with Control Barrier Functions , year=
-
[24]
Kunal Garg and James Usevitch and Joseph Breeden and Mitchell Black and Devansh Agrawal and Hardik Parwana and Dimitra Panagou , keywords =. Advances in the Theory of Control Barrier Functions: Addressing practical challenges in safe control synthesis for autonomous and robotic systems , journal =. 2024 , issn =. doi:https://doi.org/10.1016/j.arcontrol.20...
-
[25]
The Fourteenth International Conference on Learning Representations , year=
SafeFlowMatcher: Safe and Fast Planning using Flow Matching with Control Barrier Functions , author=. The Fourteenth International Conference on Learning Representations , year=
-
[26]
2025 , eprint=
SafeFlow: Safe Robot Motion Planning with Flow Matching via Control Barrier Functions , author=. 2025 , eprint=
2025
-
[27]
VLSA: Vision-Language-Action Models with Plug-and-Play Safety Constraint Layer
VLSA: Vision-Language-Action Models with Plug-and-Play Safety Constraint Layer , author=. arXiv preprint arXiv:2512.11891 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[28]
The third AI summer: AAAI Robert S
Kautz, Henry , year =. The third AI summer: AAAI Robert S. Engelmore Memorial Lecture , volume =. AI Magazine , doi =
-
[29]
N euro L ogic Decoding: (Un)supervised Neural Text Generation with Predicate Logic Constraints
Lu, Ximing and West, Peter and Zellers, Rowan and Le Bras, Ronan and Bhagavatula, Chandra and Choi, Yejin. N euro L ogic Decoding: (Un)supervised Neural Text Generation with Predicate Logic Constraints. Proceedings of the 2021 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies. 2021. doi:...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.