PhyPush: One Push is All You Need for Sensorless Physical Property Estimation with Physics-Guided Transformers
Pith reviewed 2026-06-29 21:09 UTC · model grok-4.3
The pith
PhyPush estimates an object's mass and friction from the kinematic velocity of a single push by embedding Newton's laws into a Transformer loss.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
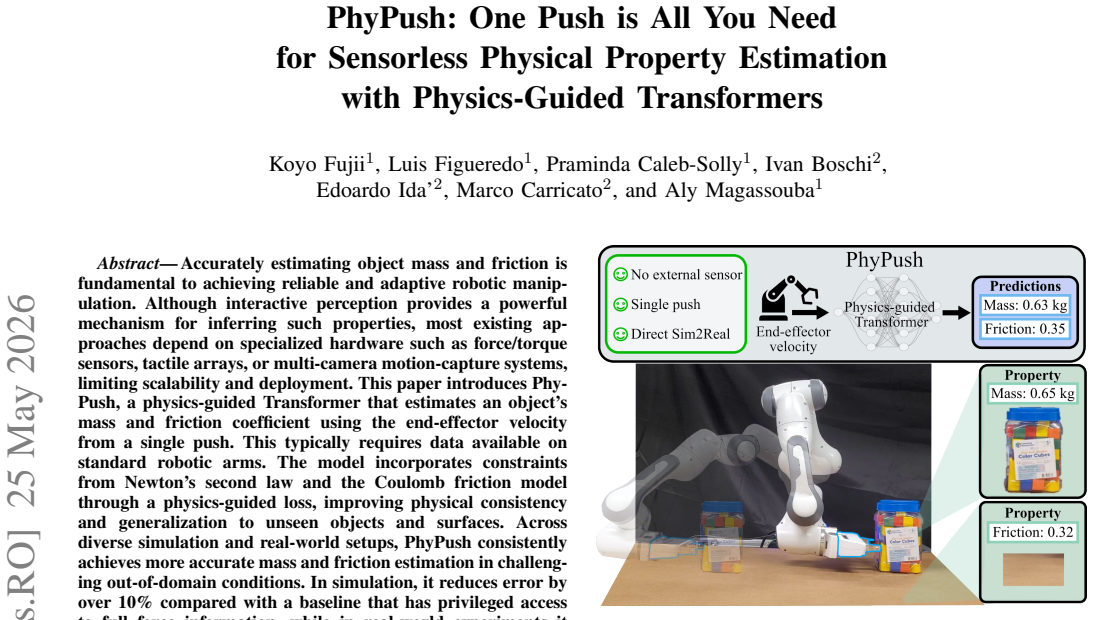
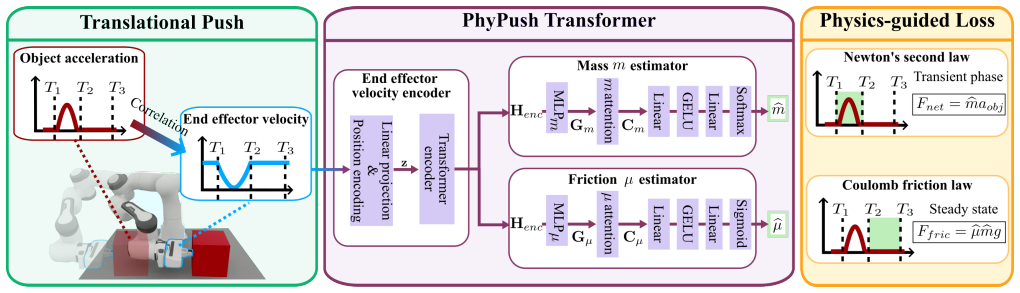
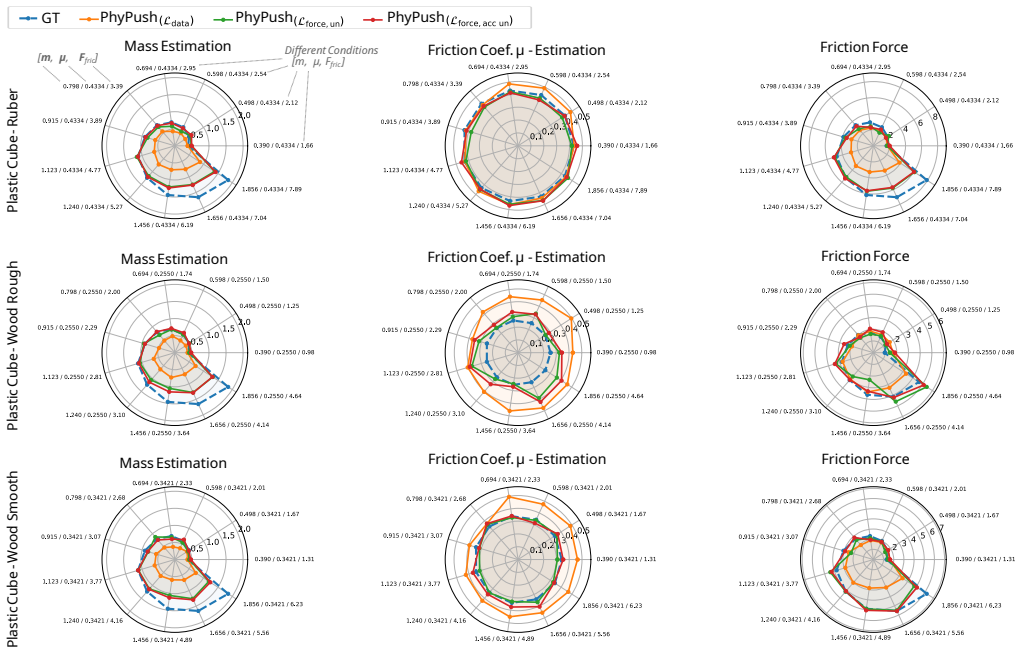
PhyPush is a physics-guided Transformer framework that estimates an object's mass and friction coefficient using only kinematically derived end-effector velocity from a single push. The model incorporates constraints from Newton's second law and the Coulomb friction model through a physics-guided loss, improving physical consistency and generalization to unseen objects and surfaces. Across diverse simulation and real-world setups, PhyPush consistently achieves more accurate mass and friction estimation in challenging out-of-domain conditions.
What carries the argument
Physics-guided loss inside a Transformer that enforces Newton's second law and Coulomb friction on kinematic velocity inputs from one push.
If this is right
- Enables mass and friction estimation on standard robot arms without force or torque sensors.
- Supports generalization to new objects and surfaces through explicit physical constraints.
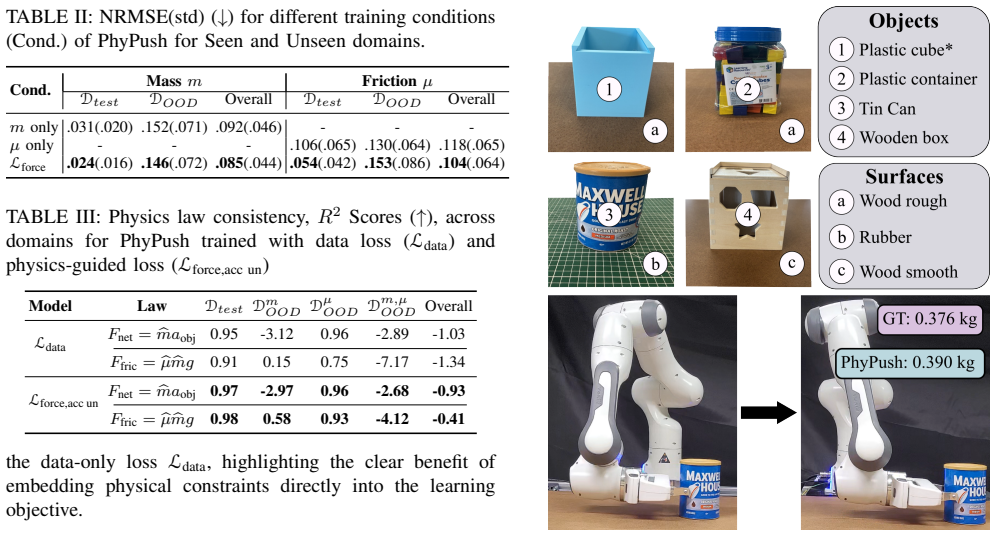
- Outperforms baselines that receive privileged full force information by more than 10 percent error reduction in simulation.
- Allows low-cost interactive perception for manipulation tasks using only readily available kinematic data.
Where Pith is reading between the lines
- The same single-push velocity signal might support estimation of additional properties such as center of mass if the loss is extended accordingly.
- Hardware costs for robotic systems could decrease by removing the need for dedicated force-sensing end-effectors.
- Physics constraints may allow similar sensor reduction in other interactive perception tasks beyond mass and friction.
Load-bearing premise
Kinematic velocity from a single push contains enough information to estimate mass and friction when the physics-guided loss is applied.
What would settle it
A controlled experiment in which adding the physics-guided loss produces no reduction in out-of-domain estimation error compared with a data-driven baseline on the same velocity data.
Figures
read the original abstract
Accurately estimating object mass and friction is fundamental to achieving reliable and adaptive robotic manipulation. Although interactive perception provides a powerful mechanism for inferring such properties, most existing approaches depend on specialized hardware such as force/torque sensors, tactile arrays, or multi-camera motion-capture systems, limiting scalability and deployment. This paper presents PhyPush, a physics-guided Transformer framework that estimates an object's mass and friction coefficient using only kinematically derived end-effector velocity from a single push. This typically requires data available on standard robotic arms. The model incorporates constraints from Newton's second law and the Coulomb friction model through a physics-guided loss, improving physical consistency and generalization to unseen objects and surfaces. Across diverse simulation and real-world setups, PhyPush consistently achieves more accurate mass and friction estimation in challenging out-of-domain conditions. In simulation, it reduces error by over 10% compared with a baseline that has privileged access to full force information, while in real-world experiments, it outperforms a data-driven loss approach. Overall, the results demonstrate that physics-guided learning can enable low-cost, sensor-efficient estimation of physical properties, relying solely on a single push and readily available kinematic data.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents PhyPush, a physics-guided Transformer that estimates object mass and friction coefficient from only kinematically derived end-effector velocity during a single push. It incorporates Newton's second law and the Coulomb friction model via a physics-guided loss to enforce physical consistency and improve generalization to unseen objects and surfaces. The central claims are that this velocity-only approach achieves more accurate estimates than baselines in out-of-domain conditions, including a >10% error reduction versus a force-privileged baseline in simulation and superiority over a data-driven loss baseline in real-world tests.
Significance. If the results hold with a properly specified baseline, the work would demonstrate that physics constraints can enable sensorless physical property estimation using only standard kinematic data, which has clear value for scalable robotic manipulation without force/torque sensors or motion capture.
major comments (1)
- [Abstract] Abstract: the claim that PhyPush reduces error by over 10% compared with a baseline that has privileged access to full force information is load-bearing for the assertion that kinematic velocity suffices; the manuscript provides no equation, section reference, or description clarifying the baseline architecture, loss, or whether force data is available only at training versus inference, so it is impossible to determine whether the comparator is a strong force-optimized estimator or merely a minimal modification of the same architecture.
minor comments (1)
- [Abstract] The abstract states that PhyPush 'outperforms a data-driven loss approach' in real-world experiments but supplies no quantitative metrics, table, or figure reference to support the magnitude of improvement.
Simulated Author's Rebuttal
We thank the referee for their careful reading and constructive feedback on our manuscript. We address the single major comment below and will revise the paper accordingly to improve clarity.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that PhyPush reduces error by over 10% compared with a baseline that has privileged access to full force information is load-bearing for the assertion that kinematic velocity suffices; the manuscript provides no equation, section reference, or description clarifying the baseline architecture, loss, or whether force data is available only at training versus inference, so it is impossible to determine whether the comparator is a strong force-optimized estimator or merely a minimal modification of the same architecture.
Authors: We agree that the abstract does not provide sufficient detail on the force-privileged baseline, which is necessary for readers to evaluate the strength of the comparison. In the full manuscript (Section 4.2 and Appendix B), the baseline is a Transformer with identical architecture to PhyPush but trained with an auxiliary supervised loss on ground-truth force/torque signals available only during training; no force data is used at inference time. This makes it a strong, force-optimized comparator rather than a minimal variant. To resolve the concern, we will revise the abstract to include a concise description of the baseline (architecture, loss, and training/inference distinction) along with a pointer to Section 4.2. We will also add a short clarifying sentence in the abstract. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper's core method trains a Transformer on kinematic end-effector velocity to regress mass and friction, regularized by a physics-guided loss that directly encodes Newton's second law and the Coulomb friction model. These constraints are drawn from established external physics rather than the model's own outputs, fitted parameters, or self-citations. No equations or sections in the provided text show a self-definitional loop, a fitted input relabeled as a prediction, or a load-bearing uniqueness claim imported from the authors' prior work. Performance comparisons to a force-privileged baseline are empirical and do not reduce the central estimation claim to a tautology. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Newton's second law and Coulomb friction model are accurate for the push scenarios
Reference graph
Works this paper leans on
-
[1]
A review of particle damping modeling and testing,
L. Gagnon, M. Morandini, and G. L. Ghiringhelli, “A review of particle damping modeling and testing,”Journal of Sound and Vibration, vol. 459, p. 114865, Oct. 2019
2019
-
[2]
Planar sliding with dry friction Part 1. Limit surface and moment function,
S. Goyal, A. Ruina, and J. Papadopoulos, “Planar sliding with dry friction Part 1. Limit surface and moment function,”Wear, vol. 143, pp. 307–330, Mar. 1991
1991
-
[3]
Estimating An Object’s Inertial Parameters By Robotic Pushing: A Data-Driven Approach,
N. Mavrakis, A. M. Ghalamzan E., and R. Stolkin, “Estimating An Object’s Inertial Parameters By Robotic Pushing: A Data-Driven Approach,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 9537–9544, Oct. 2020
2020
-
[4]
Predictive Visuo-Tactile Inter- active Perception Framework for Object Properties Inference,
A. Dutta, E. Burdet, and M. Kaboli, “Predictive Visuo-Tactile Inter- active Perception Framework for Object Properties Inference,”IEEE Transactions on Robotics, vol. 41, pp. 1386–1403, 2025
2025
-
[5]
Interactive Learning of Physical Object Properties Through Robot Manipulation and Database of Object Measurements,
A. Kruzliak, J. Hartvich, S. P. Patni, L. Rustler, J. K. Behrens, F. J. Abu-Dakka, K. Mikolajczyk, V . Kyrki, and M. Hoffmann, “Interactive Learning of Physical Object Properties Through Robot Manipulation and Database of Object Measurements,” in2024 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), pp. 7596– 7603, Oct. 2024
2024
-
[6]
Attention is all you need,
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,” Advances in neural information processing systems, vol. 30, 2017
2017
-
[7]
Estimating material properties of interacting objects using sum-gp-ucb,
M. Y . Seker and O. Kroemer, “Estimating material properties of interacting objects using sum-gp-ucb,” in2024 IEEE International Conference on Robotics and Automation, pp. 16684–16690, IEEE, 2024
2024
-
[8]
Galileo: Perceiving Physical Object Properties by Integrating a Physics Engine with Deep Learning,
J. Wu, I. Yildirim, J. J. Lim, B. Freeman, and J. Tenenbaum, “Galileo: Perceiving Physical Object Properties by Integrating a Physics Engine with Deep Learning,”
-
[9]
Estimating object physical properties from rgb-d vision and depth robot sensors using deep learning,
R. P. Cardoso and P. Moreno, “Estimating object physical properties from rgb-d vision and depth robot sensors using deep learning,” inIberian Conference on Pattern Recognition and Image Analysis, pp. 97–110, Springer, 2025
2025
-
[10]
Physically grounded vision-language models for robotic manipulation,
J. Gao, B. Sarkar, F. Xia, T. Xiao, J. Wu, B. Ichter, A. Majumdar, and D. Sadigh, “Physically grounded vision-language models for robotic manipulation,” in2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 12462–12469, IEEE, 2024
2024
-
[11]
arXiv preprint arXiv:2510.11689 (2025)
M. Wang, S. Tian, A. Swann, O. Shorinwa, J. Wu, and M. Schwa- ger, “Phys2real: Fusing vlm priors with interactive online adapta- tion for uncertainty-aware sim-to-real manipulation,”arXiv preprint arXiv:2510.11689, 2025
-
[12]
Omnipush: accurate, diverse, real-world dataset of pushing dynamics with rgb-d video,
M. Bauza, F. Alet, Y .-C. Lin, T. Lozano-P´erez, L. P. Kaelbling, P. Isola, and A. Rodriguez, “Omnipush: accurate, diverse, real-world dataset of pushing dynamics with rgb-d video,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4265–4272, IEEE, 2019
2019
-
[13]
Unsupervised discovery of objects physical properties through maxi- mum entropy reinforcement learning,
M. Chareyre, P. Fournier, J. Moras, J.-M. Bourinet, and Y . Mezouar, “Unsupervised discovery of objects physical properties through maxi- mum entropy reinforcement learning,”IEEE Robotics and Automation Letters, 2025
2025
-
[14]
DensePhysNet: Learning Dense Physical Object Representations via Multi-step Dynamic Interactions
Z. Xu, J. Wu, A. Zeng, J. B. Tenenbaum, and S. Song, “DensePhys- Net: Learning Dense Physical Object Representations via Multi-step Dynamic Interactions,” June 2019. arXiv:1906.03853 [cs]
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[15]
Push to Know! - Visuo-Tactile Based Active Object Parameter Inference with Dual Differentiable Filtering,
A. Dutta, E. Burdet, and M. Kaboli, “Push to Know! - Visuo-Tactile Based Active Object Parameter Inference with Dual Differentiable Filtering,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3137–3144, Oct. 2023
2023
-
[16]
Learning object properties using robot proprio- ception via differentiable robot-object interaction,
P. Y . Chen, C. Liu, P. Ma, J. Eastman, D. Rus, D. Randle, Y . Ivanov, and W. Matusik, “Learning object properties using robot proprio- ception via differentiable robot-object interaction,” in2025 IEEE International Conference on Robotics and Automation, pp. 5997–6004, IEEE, 2025
2025
-
[17]
Physics- informed neural networks (PINNs) for fluid mechanics: A review,
S. Cai, Z. Mao, Z. Wang, M. Yin, and G. E. Karniadakis, “Physics- informed neural networks (PINNs) for fluid mechanics: A review,” Acta Mechanica Sinica, vol. 37, no. 12, pp. 1727–1738, 2021. Friction Coef. μ - Estimation Mass Estimation Friction Coef. μ - Estimation Mass Estimation Friction Coef. μ - Estimation Friction Force Friction Force Friction Forc...
2021
-
[18]
Physics-informed learning for the friction modeling of high-ratio harmonic drives,
I. Sorrentino, G. Romualdi, F. Bergonti, G. L’Erario, S. Traversaro, and D. Pucci, “Physics-informed learning for the friction modeling of high-ratio harmonic drives,” in2024 IEEE-RAS 23rd International Conference on Humanoid Robots, pp. 505–512, IEEE, 2024
2024
-
[19]
Physics-guided neural networks (pgnn): An application in lake tem- perature modeling,
A. Daw, A. Karpatne, W. D. Watkins, J. S. Read, and V . Kumar, “Physics-guided neural networks (pgnn): An application in lake tem- perature modeling,” inKnowledge guided machine learning, pp. 353– 372, Chapman and Hall/CRC, 2022
2022
-
[20]
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
M. Mittal, P. Roth, J. Tigue,et al., “Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning,”arXiv preprint arXiv:2511.04831, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.