Robust and Resilient Soft Robotic Object Insertion with Compliance-Enabled Contact Formation and Failure Recovery
Pith reviewed 2026-05-21 22:43 UTC · model grok-4.3
The pith
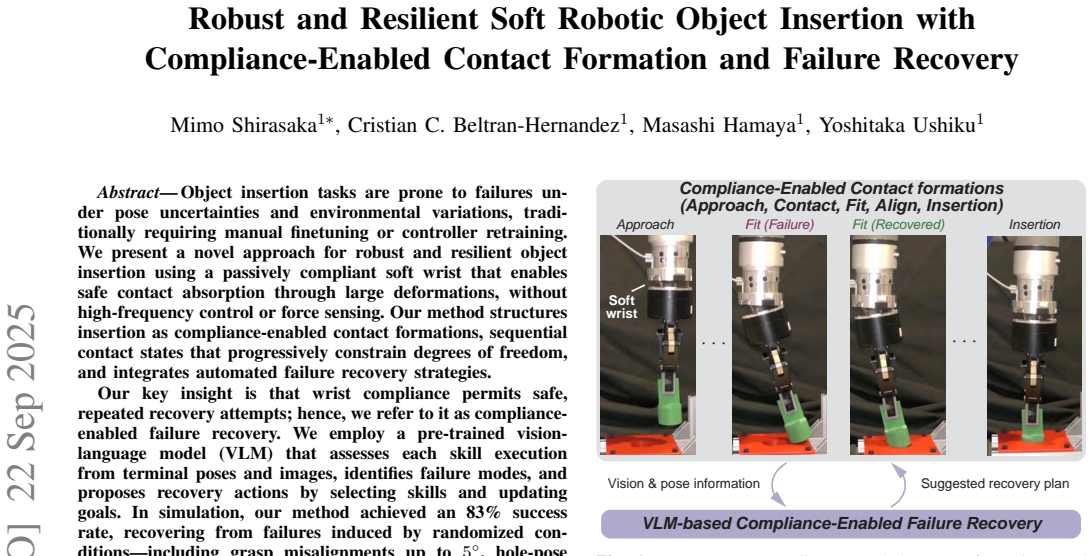
A passively compliant soft wrist structures object insertion into sequential contact formations that enable safe repeated recovery attempts guided by a vision-language model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that wrist compliance permits safe, repeated recovery attempts by structuring insertion as compliance-enabled contact formations, and that pairing this with a pre-trained vision-language model to assess each execution from terminal poses and images, identify failure modes, and propose recovery actions by selecting skills and updating goals produces resilient insertion under randomized uncertainties.
What carries the argument
compliance-enabled contact formations: sequential contact states that progressively constrain degrees of freedom while the soft wrist absorbs errors through deformation, supported by vision-language model recovery
If this is right
- The method recovers from grasp misalignments up to 5 degrees and hole-pose errors up to 20 mm through safe contact absorption and repeated attempts.
- It maintains performance under fivefold friction increases and with previously unseen square or rectangular peg shapes.
- An 83 percent success rate is achieved in simulation across randomized conditions without high-frequency control or force sensing.
- The full pipeline is validated on a physical robot, confirming transfer from simulation to hardware.
Where Pith is reading between the lines
- The same compliance-plus-recovery pattern could extend to other contact-rich tasks such as peg-in-hole assembly or tool placement in unstructured settings.
- Reducing the need for force sensors and precise controllers may allow lower-cost robots to operate reliably in variable factory or household environments.
- Collecting failure cases from the vision-language model could be used to fine-tune recovery policies for specific robot hardware or object sets.
Load-bearing premise
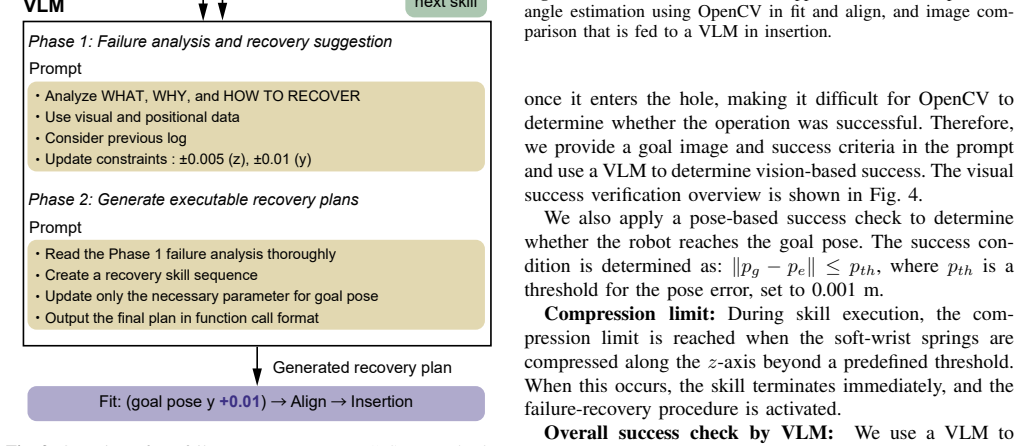
The pre-trained vision-language model can reliably assess each skill execution from terminal poses and images, correctly identify failure modes, and propose effective recovery actions by selecting skills and updating goals.
What would settle it
A set of trials in which the vision-language model repeatedly misidentifies a failure mode such as excessive friction or proposes an ineffective recovery skill, causing the overall success rate to fall well below 83 percent under the same randomized grasp and hole-pose errors.
Figures




read the original abstract
Object insertion tasks are prone to failure under pose uncertainty and environmental variation, often requiring manual fine-tuning or controller retraining. We present a novel approach for robust and resilient object insertion using a passively compliant soft wrist that enables safe contact absorption through large deformations, without high-frequency control or force sensing. Our method structures insertion as compliance-enabled contact formations, sequential contact states that progressively constrain degrees of freedom, and integrates automated failure recovery strategies. Our key insight is that wrist compliance permits safe, repeated recovery attempts; hence, we refer to it as compliance-enabled failure recovery. We employ a pre-trained vision-language model (VLM) that assesses each skill execution from terminal poses and images, identifies failure modes, and proposes recovery actions by selecting skills and updating goals. In simulation, our method achieved an 83% success rate, recovering from failures induced by randomized conditions, including grasp misalignments up to 5 degrees, hole-pose errors up to 20 mm, fivefold increases in friction, and unseen square/rectangular pegs, and we further validated the approach on a real robot. Project page is available at https://omron-sinicx.github.io/compliance-enabled-failure-recovery/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a compliance-enabled approach for soft robotic object insertion using a passively compliant soft wrist. Insertion is structured as sequential contact formations that progressively constrain degrees of freedom, with automated failure recovery implemented via a pre-trained vision-language model (VLM) that evaluates terminal poses and images, identifies failure modes, selects skills, and updates goals. The central quantitative claim is an 83% success rate in simulation under randomized perturbations (grasp misalignments up to 5°, hole-pose errors up to 20 mm, fivefold friction increases, unseen square/rectangular pegs), plus real-robot validation.
Significance. If the performance claims are supported by adequate controls and statistics, the work could contribute to resilient soft-robotics methods that exploit passive compliance for safe recovery without force sensing or high-frequency control. The combination of contact-formation sequencing with VLM-driven recovery is a plausible direction for handling uncertainty in insertion tasks.
major comments (2)
- [Experimental validation] The 83% success rate is presented without baseline comparisons to prior insertion methods, without stating the total number of trials, and without statistical details (variance, confidence intervals, or success-rate breakdown by perturbation type). This directly limits evaluation of the robustness claim under the listed conditions.
- [VLM-based failure recovery] The resilience result is attributed to both compliance-enabled contact formations and the VLM recovery loop, yet no accuracy metrics, precision/recall for failure-mode detection, or fraction of VLM-proposed recoveries that succeed on execution are reported. No ablation disabling the VLM component is provided, making it impossible to isolate the contribution of passive compliance from the recovery strategy.
minor comments (1)
- [Abstract] The abstract states 'fivefold increases in friction' without specifying the nominal friction coefficient or the exact range used in the randomized trials.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which help clarify the presentation of our experimental results and the contributions of individual components. We address each major comment below and indicate revisions to the manuscript.
read point-by-point responses
-
Referee: [Experimental validation] The 83% success rate is presented without baseline comparisons to prior insertion methods, without stating the total number of trials, and without statistical details (variance, confidence intervals, or success-rate breakdown by perturbation type). This directly limits evaluation of the robustness claim under the listed conditions.
Authors: We agree that additional experimental details would strengthen the robustness evaluation. The manuscript reports the overall 83% success rate across randomized grasp, pose, friction, and shape variations but does not explicitly detail trial counts or breakdowns. In the revised manuscript we will state the total number of simulation trials, provide a per-perturbation success-rate breakdown, and include variance and confidence-interval statistics. For baseline comparisons we will expand the discussion to reference representative prior insertion methods, highlighting differences in hardware assumptions and control requirements while noting that our passive-compliance approach targets a distinct operating regime. revision: yes
-
Referee: [VLM-based failure recovery] The resilience result is attributed to both compliance-enabled contact formations and the VLM recovery loop, yet no accuracy metrics, precision/recall for failure-mode detection, or fraction of VLM-proposed recoveries that succeed on execution are reported. No ablation disabling the VLM component is provided, making it impossible to isolate the contribution of passive compliance from the recovery strategy.
Authors: We acknowledge the importance of quantifying the VLM’s isolated contribution. The VLM assesses terminal poses and images to detect failures and propose skill selections or goal updates, while passive compliance permits safe, repeated contact attempts. In the revision we will report VLM failure-detection accuracy and the fraction of VLM-proposed recoveries that succeed on execution, drawn from our existing experimental logs. An explicit ablation that disables the VLM was not performed, because the method is conceived as an integrated pipeline in which compliance enables the recovery loop; we will instead add a qualitative analysis of representative failure cases to illustrate how the two elements interact. revision: partial
Circularity Check
No circularity: empirical validation of compliant insertion method
full rationale
The paper describes an engineering method that structures insertion via compliance-enabled contact formations and uses a pre-trained VLM for failure-mode assessment and recovery selection. The central result is an 83% success rate obtained directly from simulation trials and real-robot validation under randomized perturbations (grasp misalignment, hole-pose error, friction, unseen pegs). No derivation chain, equations, or first-principles predictions are presented that reduce by construction to fitted parameters, self-citations, or renamed inputs. The work is self-contained experimental robotics research whose performance claims rest on measured outcomes rather than any tautological mapping from method definition to reported metric.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The pre-trained vision-language model can reliably assess terminal poses and images to identify failure modes and propose recovery actions.
invented entities (1)
-
compliance-enabled contact formations
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We employ a pre-trained vision-language model (VLM) that assesses each skill execution from terminal poses and images, identifies failure modes, and proposes recovery actions by selecting skills and updating goals.
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
compliance-enabled contact formations, sequential contact states that progressively constrain degrees of freedom
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
J. Xu, Z. Hou, Z. Liu, and H. Qiao, “Compare contact model-based control and contact model-free learning: A survey of robotic peg-in- hole assembly strategies,”arXiv preprint arXiv:1904.05240, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1904
-
[2]
Autonomous robotic assembly: From part singulation to precise assembly,
K. Ota, D. K. Jha, S. Jain, B. Yerazunis, R. Corcodel, Y . Shukla, A. Bronars, and D. Romeres, “Autonomous robotic assembly: From part singulation to precise assembly,” inIEEE/RSJ International Con- ference on Intelligent Robots and Systems, 2024, pp. 13 525–13 532
work page 2024
-
[3]
Towards gen- eralized robot assembly through compliance-enabled contact forma- tions,
A. S. Morgan, Q. Bateux, M. Hao, and A. M. Dollar, “Towards gen- eralized robot assembly through compliance-enabled contact forma- tions,” inIEEE International Conference on Robotics and Automation, 2023, pp. 8010–8016
work page 2023
-
[4]
T. Nishimura, Y . Suzuki, T. Tsuji, and T. Watanabe, “Peg-in-hole under state uncertainties via a passive wrist joint with push-activate- rotation function,” inIEEE-RAS International Conference on Hu- manoid Robotics, 2017, pp. 67–74
work page 2017
-
[5]
Compliant peg-in-hole assembly using a very soft wrist,
Q. Zhang, Z. Hu, W. Wan, and K. Harada, “Compliant peg-in-hole assembly using a very soft wrist,”IEEE Robotics and Automation Letters, vol. 9, no. 1, pp. 17–24, 2023
work page 2023
-
[6]
C. C. Beltran-Hernandez, D. Petit, I. G. Ramirez-Alpizar, and K. Harada, “Variable compliance control for robotic peg-in-hole as- sembly: A deep-reinforcement-learning approach,”Applied Sciences, vol. 10, no. 19, p. 6923, 2020
work page 2020
-
[7]
M. Skubic and R. A. V olz, “Identifying contact formations from sensory patterns and its applicability to robot programming by demon- stration,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 2, 1996, pp. 458–464
work page 1996
-
[8]
A framework for robot manipulation: Skill formalism, meta learning and adaptive con- trol,
L. Johannsmeier, M. Gerchow, and S. Haddadin, “A framework for robot manipulation: Skill formalism, meta learning and adaptive con- trol,” inIEEE International Conference on Robotics and Automation, 2019, pp. 5844–5850
work page 2019
-
[9]
Learning sequences of ma- nipulation primitives for robotic assembly,
N. Vuong, H. Pham, and Q.-C. Pham, “Learning sequences of ma- nipulation primitives for robotic assembly,” inIEEE International Conference on Robotics and Automation, 2021, pp. 4086–4092
work page 2021
-
[10]
Predictive learning of error recovery with a sensorized passivity-based soft anthropomorphic hand,
K. Gilday, T. George-Thuruthel, and F. Iida, “Predictive learning of error recovery with a sensorized passivity-based soft anthropomorphic hand,”Advanced Intelligent Systems, vol. 5, no. 7, p. 2200390, 2023
work page 2023
-
[11]
Real-time anomaly detection and reactive planning with large language models,
R. Sinha, A. Elhafsi, C. Agia, M. Foutter, E. Schmerling, and M. Pavone, “Real-time anomaly detection and reactive planning with large language models,” inRobotics: Science and Systems, 2024
work page 2024
-
[12]
Racer: Rich language-guided failure recovery policies for imitation learning,
Y . Dai, J. Lee, N. Fazeli, and J. Chai, “Racer: Rich language- guided failure recovery policies for imitation learning,”arXiv preprint arXiv:2409.14674, 2024
-
[13]
A compact, cable-driven, activatable soft wrist with six degrees of freedom for assembly tasks,
F. von Drigalski, K. Tanaka, M. Hamaya, R. Lee, C. Nakashima, Y . Shibata, and Y . Ijiri, “A compact, cable-driven, activatable soft wrist with six degrees of freedom for assembly tasks,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2020, pp. 8752–8757
work page 2020
-
[14]
Stretchable materials for robust soft actuators towards assistive wearable devices,
G. Agarwal, N. Besuchet, B. Audergon, and J. Paik, “Stretchable materials for robust soft actuators towards assistive wearable devices,” Scientific Reports, vol. 6, no. 1, p. 34224, 2016
work page 2016
-
[15]
Robust proprioceptive grasping with a soft robot hand,
B. S. Homberg, R. K. Katzschmann, M. R. Dogar, and D. Rus, “Robust proprioceptive grasping with a soft robot hand,”Autonomous Robots, vol. 43, no. 3, pp. 681–696, 2019
work page 2019
-
[16]
Soft actuators for real-world applications,
M. Li, A. Pal, A. Aghakhani, A. Pena-Francesch, and M. Sitti, “Soft actuators for real-world applications,”Nature Reviews Materials, vol. 7, no. 3, pp. 235–249, 2022
work page 2022
-
[17]
Self-healing and damage resilience for soft robotics: A review,
R. A. Bilodeau and R. K. Kramer, “Self-healing and damage resilience for soft robotics: A review,”Frontiers in Robotics and AI, vol. 4, p. 48, 2017
work page 2017
-
[18]
Learning forceful manipulation skills from multi- modal human demonstrations,
A. T. Le, M. Guo, N. van Duijkeren, L. Rozo, R. Krug, A. G. Kupcsik, and M. B ¨urger, “Learning forceful manipulation skills from multi- modal human demonstrations,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2021, pp. 7770–7777
work page 2021
-
[19]
M. Okada, M. Komatsu, R. Okumura, and T. Taniguchi, “Learning compliant stiffness by impedance control-aware task segmentation and multi-objective bayesian optimization with priors,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2023, pp. 8155–8162
work page 2023
-
[20]
M. Hamaya, R. Lee, K. Tanaka, F. V on Drigalski, C. Nakashima, Y . Shibata, and Y . Ijiri, “Learning robotic assembly tasks with lower dimensional systems by leveraging physical softness and environmen- tal constraints,” inIEEE International Conference on Robotics and Automation, 2020, pp. 7747–7753
work page 2020
-
[21]
Pomdp- guided active force-based search for robotic insertion,
C. Wang, H. Luo, K. Zhang, H. Chen, J. Pan, and W. Zhang, “Pomdp- guided active force-based search for robotic insertion,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2023, pp. 10 668–10 675
work page 2023
-
[22]
X. Zhang, S. Jin, C. Wang, X. Zhu, and M. Tomizuka, “Learning insertion primitives with discrete-continuous hybrid action space for robotic assembly tasks,” inInternational Conference on Robotics and Automation, 2022, pp. 9881–9887
work page 2022
-
[23]
Apricot: Action primitives based on contact-state transition for in-hand tool manipulation,
D. Saito, A. Kanehira, K. Sasabuchi, N. Wake, J. Takamatsu, H. Koike, and K. Ikeuchi, “Apricot: Action primitives based on contact-state transition for in-hand tool manipulation,” inIEEE-RAS International Conference on Humanoid Robots, 2024, pp. 827–834
work page 2024
-
[24]
Active extrinsic contact sensing: Applica- tion to general peg-in-hole insertion,
S. Kim and A. Rodriguez, “Active extrinsic contact sensing: Applica- tion to general peg-in-hole insertion,” inInternational Conference on Robotics and Automation, 2022, pp. 10 241–10 247
work page 2022
-
[25]
1 khz behavior tree for self-adaptable tactile insertion,
Y . Wu, F. Wu, L. Chen, K. Chen, S. Schneider, L. Johannsmeier, Z. Bing, F. J. Abu-Dakka, A. Knoll, and S. Haddadin, “1 khz behavior tree for self-adaptable tactile insertion,” inIEEE International Conference on Robotics and Automation, 2024, pp. 16 002–16 008
work page 2024
-
[26]
Anomaly detection for insertion tasks in robotic assembly using gaussian process models,
D. Romeres, D. K. Jha, W. Yerazunis, D. Nikovski, and H. A. Dau, “Anomaly detection for insertion tasks in robotic assembly using gaussian process models,” inEuropean Control Conference, 2019, pp. 1017–1022
work page 2019
-
[27]
D. Park, Y . Hoshi, and C. C. Kemp, “A multimodal anomaly detector for robot-assisted feeding using an LSTM-based variational autoen- coder,”IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1544– 1551, 2018
work page 2018
-
[28]
Robot task error recovery using petri nets learned from demonstration,
G. Chang and D. Kuli ´c, “Robot task error recovery using petri nets learned from demonstration,” inInternational Conference on Advanced Robotics, 2013, pp. 1–6
work page 2013
-
[29]
Learning symbolic failure detection for grasping and mobile manip- ulation tasks,
P. Hegemann, T. Zechmeister, M. Grotz, K. Hitzler, and T. Asfour, “Learning symbolic failure detection for grasping and mobile manip- ulation tasks,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2022, pp. 4302–4309
work page 2022
-
[30]
Recovery RL: Safe reinforcement learning with learned recovery zones,
B. Thananjeyan, A. Balakrishna, S. Nair, M. Luo, K. Srinivasan, M. Hwang, J. E. Gonzalez, J. Ibarz, C. Finn, and K. Goldberg, “Recovery RL: Safe reinforcement learning with learned recovery zones,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4915– 4922, 2021
work page 2021
-
[31]
Efficient recovery learning using model predictive meta-reasoning,
S. Vats, M. Likhachev, and O. Kroemer, “Efficient recovery learning using model predictive meta-reasoning,” inIEEE International Con- ference on Robotics and Automation, 2023, pp. 7258–7264
work page 2023
-
[32]
Learning robust failure response for autonomous vision based flight,
D. M. Saxena, V . Kurtz, and M. Hebert, “Learning robust failure response for autonomous vision based flight,” inIEEE International Conference on Robotics and Automation, 2017, pp. 5824–5829
work page 2017
-
[33]
Recover: A neuro-symbolic framework for failure detection and recovery,
C. Cornelio and M. Diab, “Recover: A neuro-symbolic framework for failure detection and recovery,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, pp. 12 435–12 442
work page 2024
-
[34]
Reflect: Summarizing robot experi- ences for failure explanation and correction,
Z. Liu, A. Bahety, and S. Song, “Reflect: Summarizing robot experi- ences for failure explanation and correction,” inConference on Robot Learning, 2023, pp. 3468–3484
work page 2023
-
[35]
M. Shirasaka, T. Matsushima, S. Tsunashima, Y . Ikeda, A. Horo, S. Ikoma, C. Tsuji, H. Wada, T. Omija, D. Komukaiet al., “Self- recovery prompting: Promptable general purpose service robot system with foundation models and self-recovery,” inIEEE International Conference on Robotics and Automation, 2024, pp. 17 395–17 402
work page 2024
-
[36]
LLM3: Large language model-based task and motion planning with motion failure reasoning,
S. Wang, M. Han, Z. Jiao, Z. Zhang, Y . N. Wu, S.-C. Zhu, and H. Liu, “LLM3: Large language model-based task and motion planning with motion failure reasoning,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, pp. 12 086–12 092
work page 2024
-
[37]
Robotic object insertion with a soft wrist through sim-to-real privi- leged training,
Y . Fuchioka, C. C. Beltran-Hernandez, H. Nguyen, and M. Hamaya, “Robotic object insertion with a soft wrist through sim-to-real privi- leged training,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, pp. 9159–9166
work page 2024
-
[38]
robosuite: A Modular Simulation Framework and Benchmark for Robot Learning
Y . Zhu, J. Wong, A. Mandlekar, R. Mart´ın-Mart´ın, A. Joshi, S. Nasiri- any, and Y . Zhu, “robosuite: A modular simulation framework and benchmark for robot learning,”arXiv preprint arXiv:2009.12293
work page internal anchor Pith review Pith/arXiv arXiv 2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.