Generalized Multiple Correlation Coefficient as a Similarity Measurements between Trajectories
Pith reviewed 2026-05-25 17:28 UTC · model grok-4.3
The pith
The Generalized Multiple Correlation Coefficient extends the multiple correlation coefficient to measure trajectory similarity while remaining unchanged under any linear transformation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The Generalized Multiple Correlation Coefficient is defined as the natural extension of the multiple correlation coefficient based on Pearson correlation and the coefficient of determination; this construction is claimed to produce a similarity value that equals one for any two trajectories related by an arbitrary linear transformation and remains robust under additive noise.
What carries the argument
The Generalized Multiple Correlation Coefficient (GMCC), constructed as the extension of the multiple correlation coefficient via Pearson's r and R-squared to enforce invariance under linear maps.
If this is right
- Trajectories can be clustered directly in imitation learning without explicit preprocessing for scale, rotation or shear.
- The metric supports real-time classification because it avoids iterative alignment procedures required by many existing distances.
- Comparison remains stable when sensor noise is present because the underlying correlation formulation discounts additive perturbations.
- The same coefficient applies to any pair of vector-valued time series without domain-specific adjustments for linear distortions.
Where Pith is reading between the lines
- The invariance property may allow the metric to serve as a loss function inside gradient-based optimization for trajectory prediction models.
- Because the construction uses only linear algebra operations already common in signal processing, integration into existing robot control pipelines requires minimal new code.
- If the metric truly captures similarity independent of linear transforms, it could replace hand-crafted feature normalizations in datasets of human motion capture.
Load-bearing premise
Extending the multiple correlation coefficient in the stated way automatically produces invariance to every linear transformation while keeping the measure robust to noise.
What would settle it
Compute the GMCC between a trajectory and the same trajectory after applying a shear or squeeze matrix; the value must equal 1 if the invariance claim holds.
Figures
read the original abstract
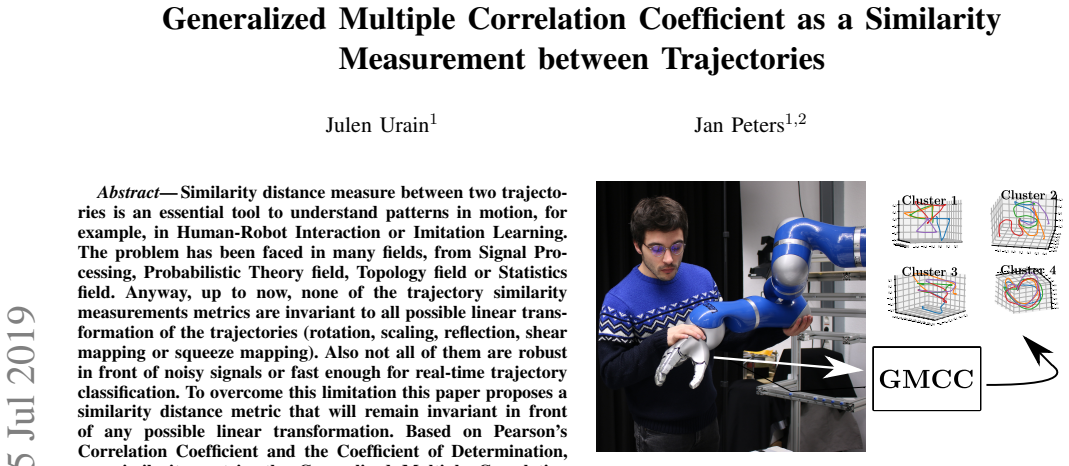
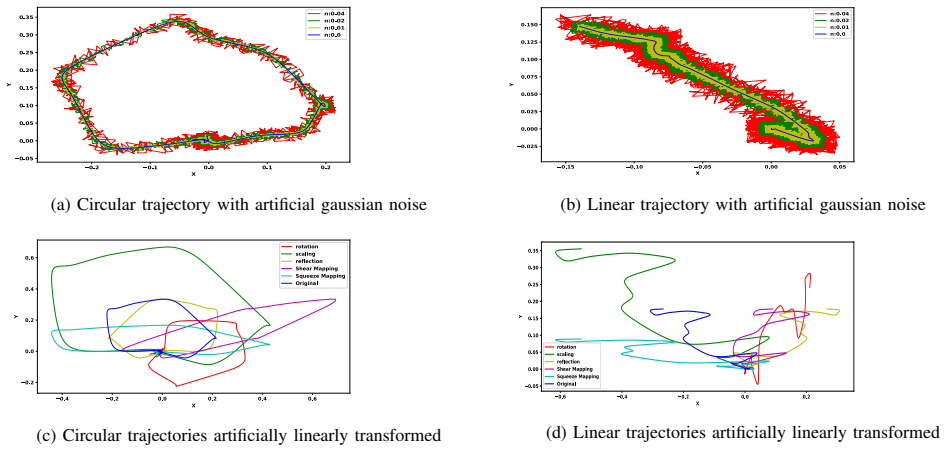
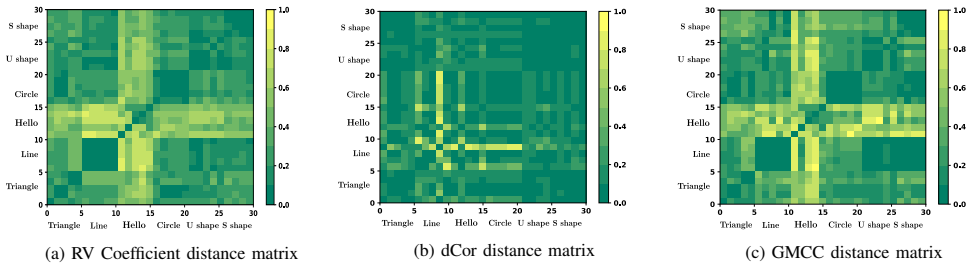
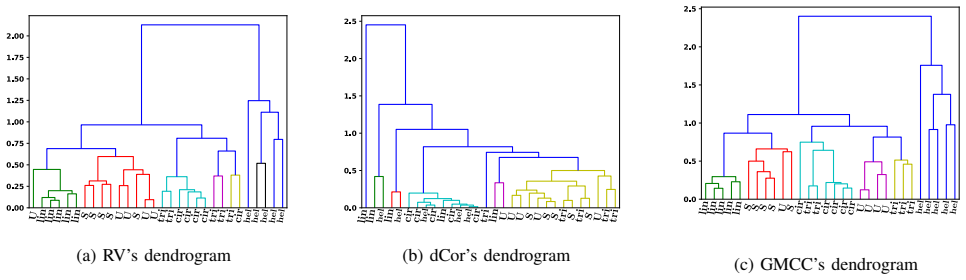
Similarity distance measure between two trajectories is an essential tool to understand patterns in motion, for example, in Human-Robot Interaction or Imitation Learning. The problem has been faced in many fields, from Signal Processing, Probabilistic Theory field, Topology field or Statistics field.Anyway, up to now, none of the trajectory similarity measurements metrics are invariant to all possible linear transformation of the trajectories (rotation, scaling, reflection, shear mapping or squeeze mapping). Also not all of them are robust in front of noisy signals or fast enough for real-time trajectory classification. To overcome this limitation this paper proposes a similarity distance metric that will remain invariant in front of any possible linear transformation.Based on Pearson Correlation Coefficient and the Coefficient of Determination, our similarity metric, the Generalized Multiple Correlation Coefficient (GMCC) is presented like the natural extension of the Multiple Correlation Coefficient. The motivation of this paper is two fold. First, to introduce a new correlation metric that presents the best properties to compute similarities between trajectories invariant to linear transformations and compare it with some state of the art similarity distances.Second, to present a natural way of integrating the similarity metric in an Imitation Learning scenario for clustering robot trajectories.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the Generalized Multiple Correlation Coefficient (GMCC) as a trajectory similarity metric extending the multiple correlation coefficient via Pearson correlation and the coefficient of determination. It claims GMCC is invariant under all linear transformations (rotation, scaling, reflection, shear, squeeze) and robust to noise, while being suitable for real-time use; the work also compares it to existing metrics and integrates it into an imitation-learning pipeline for clustering robot trajectories.
Significance. If the invariance property is rigorously established, GMCC would address a genuine gap in trajectory similarity measures for HRI and imitation learning by handling a broader class of transformations than current methods while remaining computationally lightweight. The explicit integration into a clustering step for robot trajectories supplies a concrete application context.
major comments (2)
- [Abstract] Abstract: The claim that GMCC(X,Y) remains invariant under arbitrary invertible linear maps A (explicitly including shear [[1,a],[0,1]] and squeeze) is asserted without derivation. While multiple correlation is invariant to reparameterization of the regressors, the manuscript supplies no argument showing that the joint transformation of both trajectories by the same A preserves the coefficient when the map is non-orthogonal.
- [Abstract] Abstract: No explicit definition, equation, or proof is given for GMCC itself, nor any verification (analytic or numeric) that the construction is independent of the coordinate basis after a general linear change. This absence makes the central invariance claim impossible to evaluate from the supplied text.
minor comments (2)
- [Title] Title: 'Measurements' should be 'Measurement'.
- [Abstract] Abstract: Repeated use of 'in front of' for 'under' or 'to' is nonstandard; 'similarity distance metric' is internally inconsistent since a correlation coefficient is not a distance.
Simulated Author's Rebuttal
We thank the referee for their careful reading and constructive comments. We address the major comments point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that GMCC(X,Y) remains invariant under arbitrary invertible linear maps A (explicitly including shear [[1,a],[0,1]] and squeeze) is asserted without derivation. While multiple correlation is invariant to reparameterization of the regressors, the manuscript supplies no argument showing that the joint transformation of both trajectories by the same A preserves the coefficient when the map is non-orthogonal.
Authors: We agree that the abstract asserts the invariance property without supplying a derivation. In the revised manuscript we will add an explicit proof that GMCC(X,Y) is unchanged when both trajectories are transformed by the same invertible linear map A, including non-orthogonal cases such as shear and squeeze. The argument will start from the definition of the multiple correlation coefficient and show that the joint linear transformation leaves the coefficient invariant. revision: yes
-
Referee: [Abstract] Abstract: No explicit definition, equation, or proof is given for GMCC itself, nor any verification (analytic or numeric) that the construction is independent of the coordinate basis after a general linear change. This absence makes the central invariance claim impossible to evaluate from the supplied text.
Authors: We acknowledge that the abstract contains neither the explicit definition of GMCC nor any derivation or verification of its invariance. The revised manuscript will include the mathematical definition of GMCC (as the natural extension of the multiple correlation coefficient via Pearson correlation and the coefficient of determination) together with both an analytic proof and numerical verification that the measure is independent of the coordinate basis after an arbitrary invertible linear change. revision: yes
Circularity Check
GMCC defined directly from Pearson correlation and R² without self-referential reduction
full rationale
The paper introduces GMCC explicitly as the natural extension of the Multiple Correlation Coefficient constructed from the Pearson Correlation Coefficient and the Coefficient of Determination. No load-bearing step reduces the claimed linear-invariance property to a fitted parameter, a self-citation chain, or an input by construction; the definition is presented as a direct statistical generalization whose properties are asserted to follow from the base coefficients. The derivation therefore remains self-contained against external statistical benchmarks rather than internally circular.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption GMCC is the natural extension of the Multiple Correlation Coefficient that remains invariant under any linear transformation
Reference graph
Works this paper leans on
-
[1]
An algorithmic perspective on imitation learning,
T. Osa, J. Pajarinen, G. Neumann, J. A. Bagnell, P. Abbeel, J. Peters, et al., “An algorithmic perspective on imitation learning,” Foundations and Trends R⃝ in Robotics, vol. 7, no. 1-2, pp. 1–179, 2018
work page 2018
-
[2]
S. Schaal, “Learning from demonstration,” in Advances in neural information processing systems , pp. 1040–1046, 1997
work page 1997
-
[3]
Prediction of intention during interaction with icub with probabilistic movement primitives,
O. Dermy, A. Paraschos, M. Ewerton, J. Peters, F. Charpillet, and S. Ivaldi, “Prediction of intention during interaction with icub with probabilistic movement primitives,” Frontiers in Robotics and AI , vol. 4, p. 45, 2017
work page 2017
-
[4]
Generalization of human grasping for multi-fingered robot hands,
H. B. Amor, O. Kroemer, U. Hillenbrand, G. Neumann, and J. Peters, “Generalization of human grasping for multi-fingered robot hands,” in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2043–2050, IEEE, 2012
work page 2012
-
[5]
Human–robot interaction: a survey,
M. A. Goodrich, A. C. Schultz, et al. , “Human–robot interaction: a survey,” Foundations and Trends R⃝ in Human–Computer Interaction , vol. 1, no. 3, pp. 203–275, 2008
work page 2008
-
[6]
Learning responsive robot behavior by imitation,
H. B. Amor, D. V ogt, M. Ewerton, E. Berger, B. Jung, and J. Peters, “Learning responsive robot behavior by imitation,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3257– 3264, IEEE, 2013
work page 2013
-
[7]
Learning interaction for collaborative tasks with prob- abilistic movement primitives,
G. Maeda, M. Ewerton, R. Lioutikov, H. B. Amor, J. Peters, and G. Neumann, “Learning interaction for collaborative tasks with prob- abilistic movement primitives,” in 2014 IEEE-RAS International Con- ference on Humanoid Robots , pp. 527–534, IEEE, 2014
work page 2014
-
[8]
Interaction primitives for human-robot cooperation tasks,
H. B. Amor, G. Neumann, S. Kamthe, O. Kroemer, and J. Peters, “Interaction primitives for human-robot cooperation tasks,” in 2014 IEEE international conference on robotics and automation (ICRA) , pp. 2831–2837, IEEE, 2014
work page 2014
-
[9]
Probabilistic movement primitives,
A. Paraschos, C. Daniel, J. R. Peters, and G. Neumann, “Probabilistic movement primitives,” in Advances in neural information processing systems, pp. 2616–2624, 2013
work page 2013
-
[10]
Adap- tation and robust learning of probabilistic movement primitives,
S. Gomez-Gonzalez, G. Neumann, B. Sch ¨olkopf, and J. Peters, “Adap- tation and robust learning of probabilistic movement primitives,” arXiv preprint arXiv:1808.10648, 2018
-
[11]
Hidden-markov- models-based dynamic hand gesture recognition,
X. Wang, M. Xia, H. Cai, Y . Gao, and C. Cattani, “Hidden-markov- models-based dynamic hand gesture recognition,” Mathematical Prob- lems in Engineering , vol. 2012, 2012
work page 2012
-
[12]
Relations between two sets of variates,
H. Hotelling, “Relations between two sets of variates,” in Break- throughs in statistics , pp. 162–190, Springer, 1992
work page 1992
-
[13]
Le traitement des variables vectorielles,
Y . Escoufier, “Le traitement des variables vectorielles,” Biometrics, pp. 751–760, 1973
work page 1973
-
[14]
G. J. Sz ´ekely, M. L. Rizzo, et al. , “Brownian distance covariance,” The annals of applied statistics , vol. 3, no. 4, pp. 1236–1265, 2009
work page 2009
-
[15]
Toward accurate dynamic time warping in linear time and space,
S. Salvador and P. Chan, “Toward accurate dynamic time warping in linear time and space,” Intelligent Data Analysis , vol. 11, no. 5, pp. 561–580, 2007
work page 2007
-
[16]
Robust and fast similarity search for moving object trajectories,
L. Chen, M. T. ¨Ozsu, and V . Oria, “Robust and fast similarity search for moving object trajectories,” in Proceedings of the 2005 ACM SIGMOD international conference on Management of data , pp. 491– 502, ACM, 2005
work page 2005
-
[17]
Computing discrete fr ´echet distance,
T. Eiter and H. Mannila, “Computing discrete fr ´echet distance,” tech. rep., Citeseer, 1994
work page 1994
-
[18]
Completeness and total boundedness of the hausdorff metric,
J. Henrikson, “Completeness and total boundedness of the hausdorff metric,”
-
[19]
P.-F. Marteau, “Time warp edit distance,” arXiv preprint arXiv:0802.3522, 2008
work page internal anchor Pith review Pith/arXiv arXiv 2008
-
[20]
M. H. Kutner, C. J. Nachtsheim, J. Neter, and W. Li, Applied Linear Statistical Models Fifth Edition
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.