Mode 0: A New 3GPP V2X Resource Allocation Category for Roadside Computing Unit-Assisted Safety Communication
Pith reviewed 2026-06-29 19:56 UTC · model grok-4.3
The pith
Mode 0 adds roadside computing units to the 3GPP V2X taxonomy to fix latency and occlusion failures in safety messaging.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
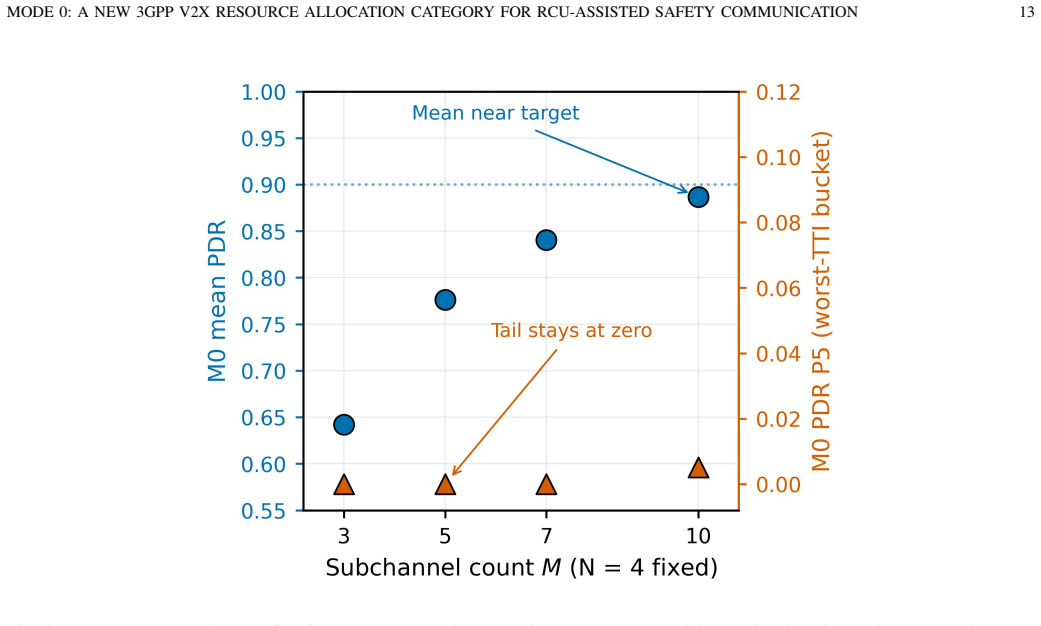
The binary taxonomy of base station and vehicle UE is structurally incomplete because base-station scheduling saturates at high-density nodes and UE autonomy cannot provide pre-emergence warning for occluded participants. Mode 0 defines a subfamily from Mode 0a to Mode 0c centered on the Roadside Computing Unit. Convergent evidence from standards confirms the need, and MAPPO simulations show Mode 0c with demand separation achieves strict Pareto improvement with M0 PDR 0.999, M1 PDR 0.998 at pool utilization ≤1, and worst-TTI delivery ratio of 0.601.
What carries the argument
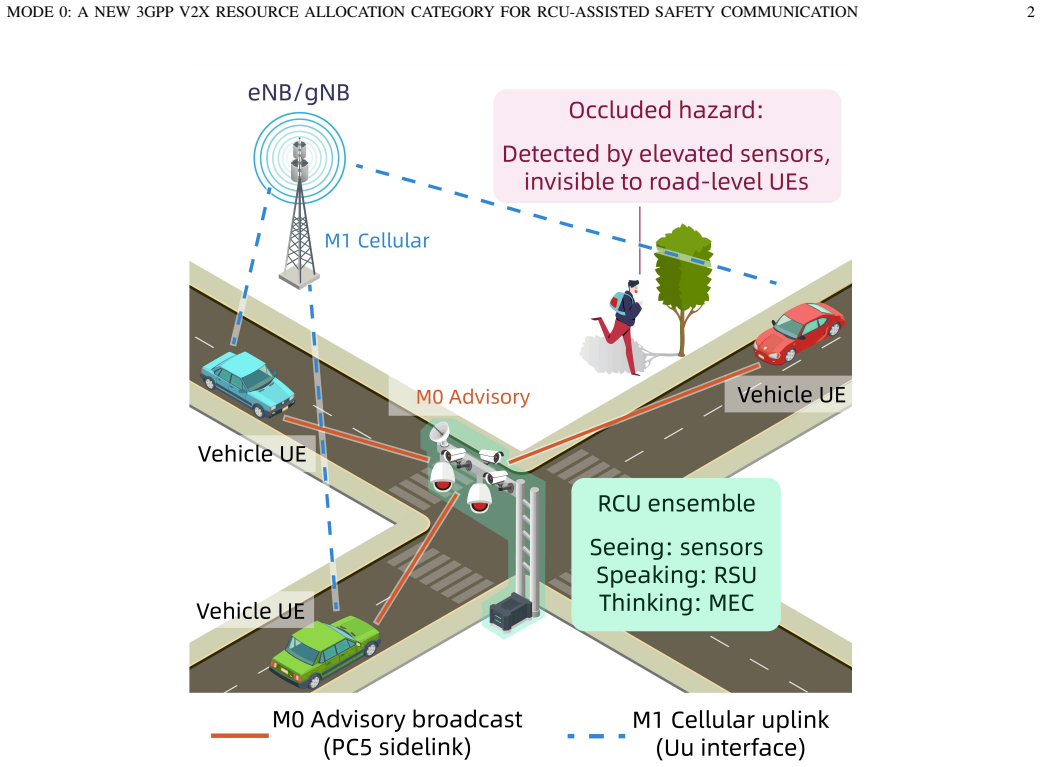
Mode 0, the new 3GPP V2X resource allocation category defined by the Roadside Computing Unit as the central entity performing sensing, communication, and computation.
If this is right
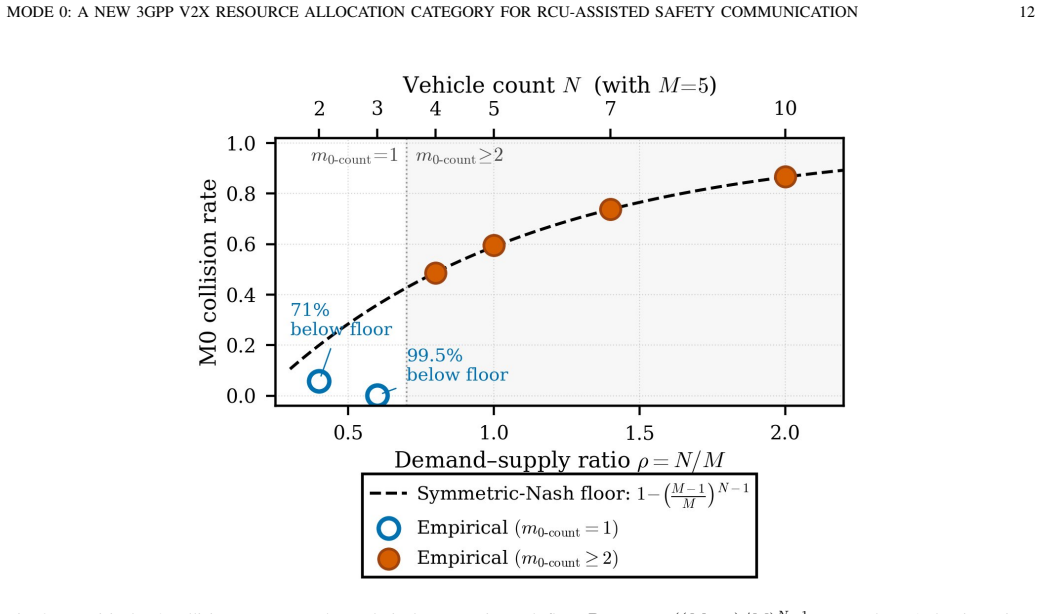
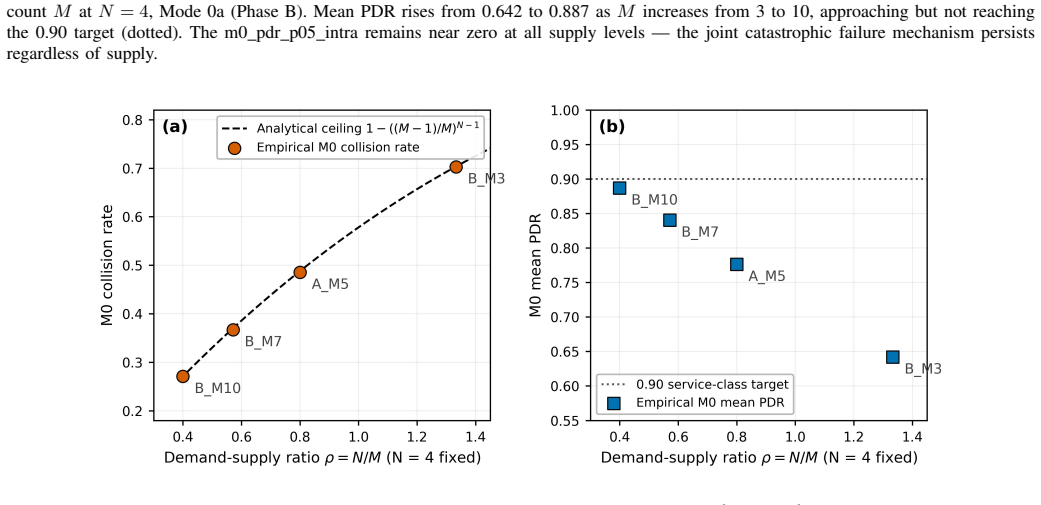
- Mode 0a in shared-pool baseline sits at the analytical symmetric-Nash coordination floor.
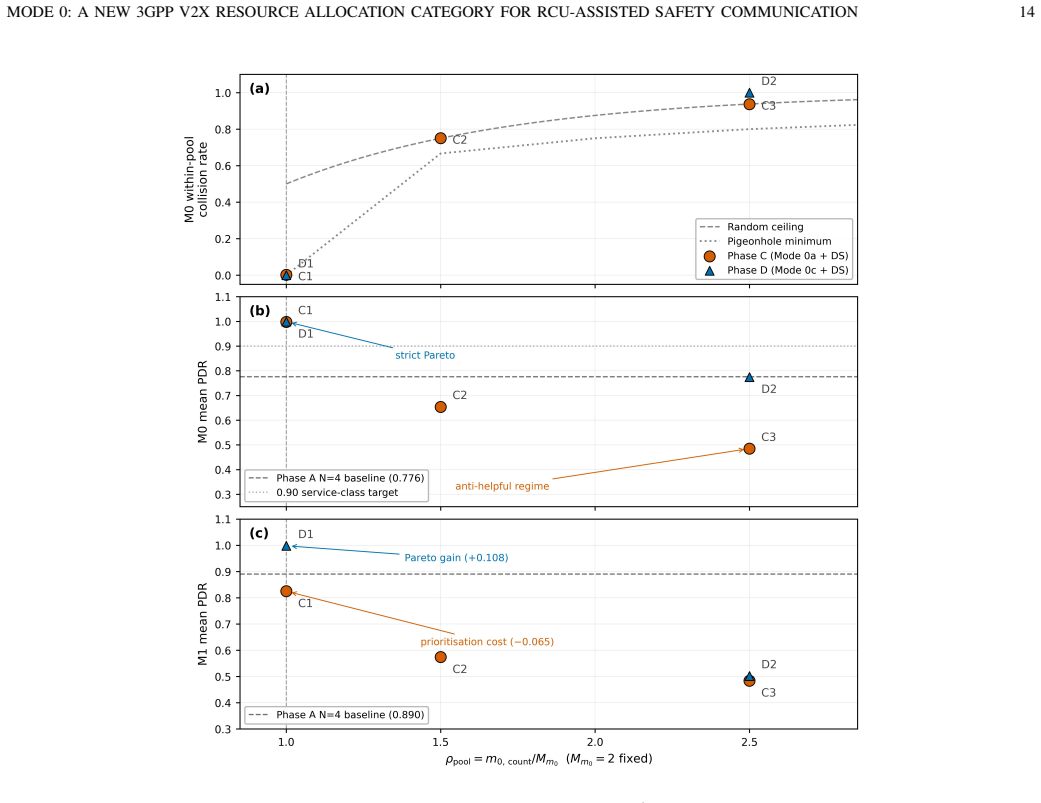
- Mode 0c with demand separation achieves strict Pareto improvement for both traffic classes.
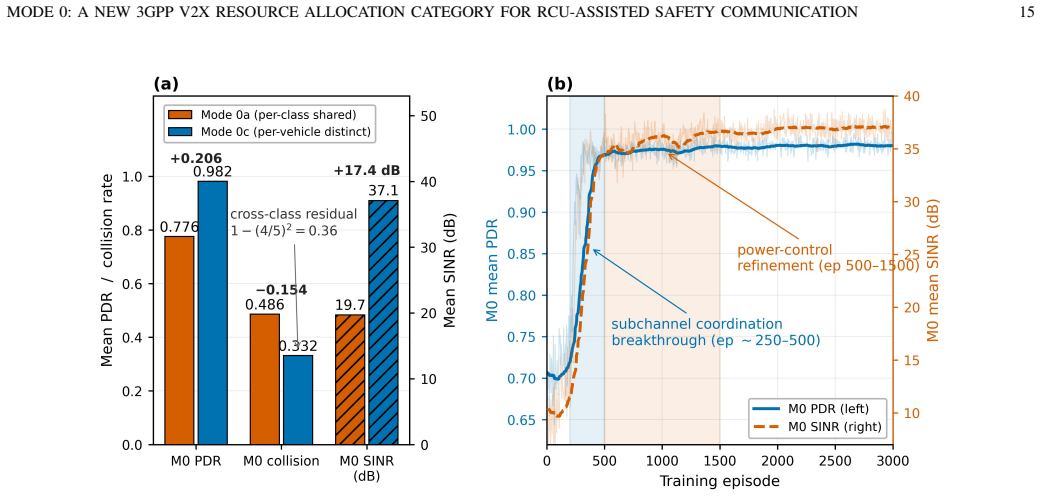
- Mode 0c lifts the worst-TTI delivery ratio from near-zero to 0.601, satisfying the latency safety requirement.
- Deployment evidence from Chinese national standards, China Unicom RS-MEC, and European and US C-V2X programs shows convergence on roadside nodes without a coordination standard.
Where Pith is reading between the lines
- Standardization of Mode 0 could provide the missing coordination framework for roadside infrastructure across existing programs.
- Real-world trials at high-density intersections would test whether the simulated delivery ratios hold under variable wireless conditions.
Load-bearing premise
The binary entity taxonomy of base stations and vehicle UEs is structurally incomplete for handling high-density and occluded traffic scenarios.
What would settle it
A high-density scenario in which Mode 0c with demand separation fails to lift the worst-TTI delivery ratio above 0.5 would falsify the performance advantage over existing modes.
Figures
read the original abstract
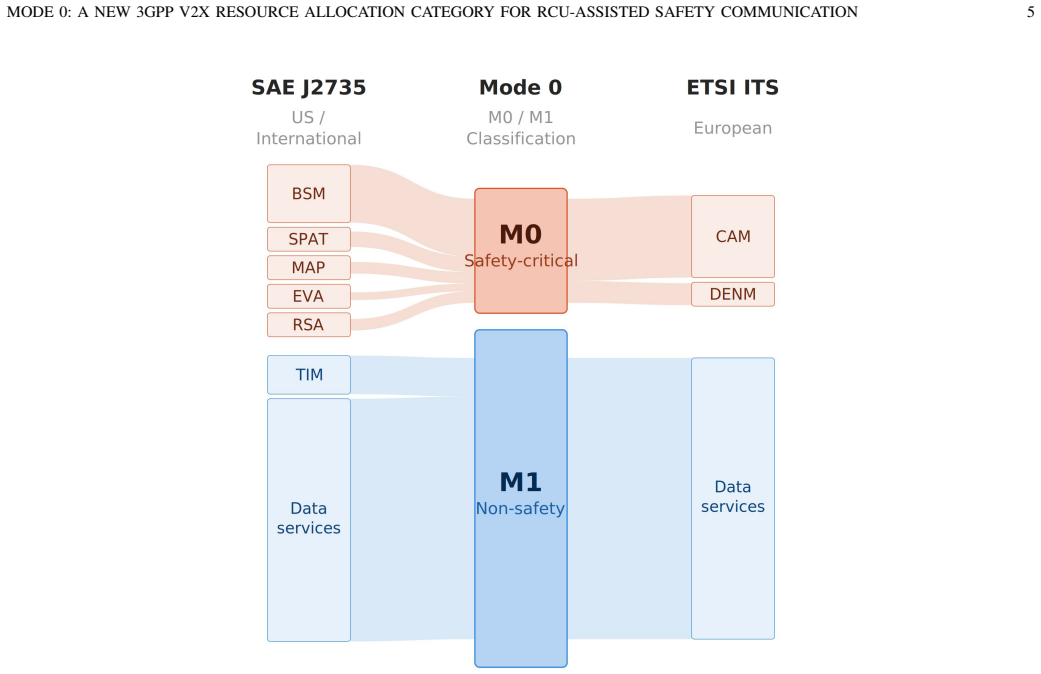
The 3GPP V2X resource allocation framework defines two entity classes -- the base station and the vehicle UE -- and four modes across LTE and NR generations. We demonstrate that this binary taxonomy is structurally incomplete. Base station-led scheduling saturates at high-density traffic nodes, producing latency-tail failures that persist even when mean packet delivery ratios approach the service-class target. UE autonomy is categorically incapable of pre-emergence warning for occluded traffic participants and insufficient for large-scope cascading environmental hazards. We propose Mode 0, a new 3GPP V2X category whose defining entity is the Roadside Computing Unit (RCU) -- an infrastructure ensemble integrating elevated sensing (Seeing), sidelink communication (Speaking), and local computational evaluation (Thinking), owned by traffic management authorities. Mode 0 defines a subfamily spectrum from Mode 0a (all-passive UEs, the guaranteed minimum) through Mode 0c (all-active UEs, the optimal target). Convergent deployment evidence from Chinese national standards (DB11/T 2329.1-2024, T/ITS 0224.1-2025), China Unicom RS-MEC infrastructure, and European and US C-V2X programs confirms that both institutional sides are converging on the roadside traffic node without a coordination standard. A fifteen-run Multi-Agent Proximal Policy Optimization (MAPPO) simulation validates the architectural family: Mode 0a in shared-pool baseline sits at the analytical symmetric-Nash coordination floor; Mode 0c with demand separation achieves strict Pareto improvement for both traffic classes (M0 PDR 0.999, M1 PDR 0.998 at $\rho_{\rm pool} \leq 1$) and lifts the worst-TTI delivery ratio from near-zero to 0.601 -- the only configuration satisfying the latency safety requirement structurally. We call for a 3GPP study item on Mode 0 within the NR-V2X sidelink enhancement work programme.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript argues that the 3GPP V2X binary taxonomy of base-station and vehicle-UE entities is structurally incomplete for high-density nodes and occluded participants. It proposes a new Mode 0 category whose central entity is the Roadside Computing Unit (RCU), an infrastructure node providing elevated sensing, sidelink communication, and local computation, with a subfamily from Mode 0a (passive UEs) to Mode 0c (active UEs). Convergent real-world deployment evidence from Chinese, European, and US programs is cited. A 15-run MAPPO simulation is presented as validation, claiming that Mode 0c with demand separation yields strict Pareto improvement (M0 PDR 0.999, M1 PDR 0.998 at ρ_pool ≤ 1) and raises worst-TTI delivery ratio from near-zero to 0.601—the only configuration meeting the latency safety requirement.
Significance. If the simulation results can be reproduced with full model specification and statistical reporting, the work would supply a concrete architectural proposal for infrastructure-assisted V2X that addresses documented saturation and occlusion gaps in existing modes. The citation of national standards and operator deployments (DB11/T 2329.1-2024, T/ITS 0224.1-2025, China Unicom RS-MEC) provides practical grounding. The simulation is credited for demonstrating a potential Pareto frontier shift, but the absence of variance statistics and model equations prevents the strong structural claims from being evaluated.
major comments (1)
- [Abstract and simulation validation paragraph] Abstract and simulation validation paragraph: the headline performance numbers (M0 PDR 0.999, M1 PDR 0.998, worst-TTI 0.601) that underpin the strict Pareto improvement and “only configuration satisfying the latency safety requirement structurally” claims derive from a 15-run MAPPO experiment whose model construction, demand-separation mechanism, exclusion rules, per-run traces, standard deviations, and confidence intervals are not reported. In multi-agent RL resource allocation, tail-metric variance across seeds routinely exceeds 0.05–0.15; without these statistics the point estimates cannot robustly support the central performance assertions.
minor comments (2)
- [Abstract] The symbol ρ_pool is introduced without an explicit definition or reference to its equation.
- [Mode 0 definition] The manuscript would benefit from a dedicated subsection enumerating the precise differences between Mode 0a, 0b, and 0c (e.g., which UE behaviors are active vs. passive).
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the simulation validation. We address the major comment below and commit to strengthening the experimental reporting in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract and simulation validation paragraph] Abstract and simulation validation paragraph: the headline performance numbers (M0 PDR 0.999, M1 PDR 0.998, worst-TTI 0.601) that underpin the strict Pareto improvement and “only configuration satisfying the latency safety requirement structurally” claims derive from a 15-run MAPPO experiment whose model construction, demand-separation mechanism, exclusion rules, per-run traces, standard deviations, and confidence intervals are not reported. In multi-agent RL resource allocation, tail-metric variance across seeds routinely exceeds 0.05–0.15; without these statistics the point estimates cannot robustly support the central performance assertions.
Authors: We agree that the manuscript does not currently report the requested statistical details or full model specification, which limits independent evaluation of the robustness of the reported point estimates. In the revised manuscript we will add a dedicated simulation appendix containing: the complete MAPPO model equations and hyperparameters, a precise description of the demand-separation mechanism and exclusion rules, tabulated per-run results, and standard deviations together with 95 % confidence intervals for PDR and worst-TTI delivery ratio. These additions will directly address the concern about seed variance in multi-agent RL settings while preserving the architectural claims. revision: yes
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper proposes Mode 0 as a new 3GPP V2X category whose entity is the RCU, arguing the existing base-station/UE binary taxonomy is incomplete. It supports performance claims (PDR values, Pareto improvement, worst-TTI lift) via a 15-run MAPPO simulation presented as external validation of the architectural family. No equations, definitions, or self-citations are shown that reduce the reported metrics to inputs by construction, rename known results, or import uniqueness from prior author work. The central claims rest on the proposal itself plus independent simulation outputs rather than self-referential fitting or load-bearing self-citation chains. The derivation is therefore self-contained.
Axiom & Free-Parameter Ledger
free parameters (1)
- MAPPO simulation parameters
axioms (1)
- domain assumption Base station-led scheduling saturates at high-density traffic nodes and UE autonomy cannot provide pre-emergence warning for occluded participants.
invented entities (1)
-
Roadside Computing Unit (RCU)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Technical Report 22.885: Study on LTE Support for Vehicle-to-Everything (V2X) Services,
3GPP, “Technical Report 22.885: Study on LTE Support for Vehicle-to-Everything (V2X) Services,” Release 14, v14.0.0, Dec. 2015. [Online]. Available: https://www.3gpp.org/ftp/Specs/archive/22 series/22.885/
2015
-
[2]
A tutorial on 5G NR V2X communications,
M. H. C. Garcia, A. Molina-Galan, M. Boban, J. Gozalvez, B. Coll-Perales, T. Sahin, and A. Kousaridas, “A tutorial on 5G NR V2X communications,”IEEE Commun. Surveys Tuts., vol. 23, no. 3, pp. 1972–2026, 3rd Quart., 2021, doi: 10.1109/COMST.2021.3057017
-
[3]
DB11/T 2329.1-2024: Technical Requirements for Information Interaction of Vehicle-Road-Cloud Integration, Part 1: Roadside Facilities and Cloud Control Platform,
Beijing Municipal Administration for Market Regulation, “DB11/T 2329.1-2024: Technical Requirements for Information Interaction of Vehicle-Road-Cloud Integration, Part 1: Roadside Facilities and Cloud Control Platform,” issued Nov. 28, 2024, effective Mar. 1, 2025
2024
-
[4]
T/ITS 0224.1-2025: Vehicle-Infrastructure Cooperative System MEC Facility, Part 1: General Require- ments,
China ITS Industry Alliance, “T/ITS 0224.1-2025: Vehicle-Infrastructure Cooperative System MEC Facility, Part 1: General Require- ments,” issued Jun. 26, 2025, effective Jul. 1, 2025
2025
-
[5]
China Unicom releases roadside multi-access edge computing unit (RS-MEC) innovation results,
China Unicom Smart Network Innovation Center, “China Unicom releases roadside multi-access edge computing unit (RS-MEC) innovation results,”Autom. Panorama (Zidonghua Lanyue), vol. 41, no. 2, p. 6, Feb. 2024, doi: 10.3969/j.issn.1003-0492.2024.02.017. (in Chinese)
-
[6]
A survey on road safety and traffic efficiency vehicular applications based on C-V2X technologies,
I. Soto, M. Calderon, O. Amador, and M. Urue ˜na, “A survey on road safety and traffic efficiency vehicular applications based on C-V2X technologies,”Veh. Commun., vol. 33, art. no. 100428, Jan. 2022, doi: 10.1016/j.vehcom.2021.100428. MODE 0: A NEW 3GPP V2X RESOURCE ALLOCATION CATEGORY FOR RCU-ASSISTED SAFETY COMMUNICATION 18
-
[7]
EN 302 637-2: Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service,
ETSI, “EN 302 637-2: Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service,” v1.4.1, Apr. 2019. [Online]. Available: https://www.etsi.org/deliver/etsi en/302600 302699/ 30263702/
2019
-
[8]
J2735: V2X Communication Message Set Dictionary,
SAE International, “J2735: V2X Communication Message Set Dictionary,” revised Sep. 2024. [Online]. Available: https://saemobilus. sae.org/standards/
2024
-
[9]
A. Wippelhauser, T. A. Tomaschek, M. Verdes, and L. Bokor, “Real-life traffic data based ITS-G5 channel load simulations of a major Hungarian C-ITS deployment site,”Appl. Sci., vol. 13, no. 14, art. no. 8419, Jul. 2023, doi: 10.3390/app13148419
-
[10]
R1-1812399: Designs for NR V2X Mode 2 Resource Allocation,
3GPP, “R1-1812399: Designs for NR V2X Mode 2 Resource Allocation,” RAN1#95, Spokane, W A, USA, Nov. 2018. [Online]. Available: https://www.3gpp.org/ftp/tsg ran/WG1 RL1/TSGR1 95/Docs/
2018
-
[11]
J. M ¨uller, J. Strohbeck, M. Herrmann, and M. Buchholz, “Motion planning for connected automated vehicles at occluded intersections with infrastructure sensors,”IEEE Trans. Intell. Transp. Syst., vol. 23, no. 10, pp. 17479–17490, Oct. 2022, doi: 10.1109/TITS.2022.3152628
-
[12]
C-V2X Use Cases and Service Level Requirements (V ols. I, II and III),
5G Automotive Association (5GAA), “C-V2X Use Cases and Service Level Requirements (V ols. I, II and III),” White Paper, Jan. 2025. [Online]. Available: https://5gaa.org/c-v2x-use-cases-and-service-level-requirements-2025/
2025
-
[13]
Ericsson Mobility Report,
Ericsson, “Ericsson Mobility Report,” Nov. 2025. [Online]. Available: https://www.ericsson.com/en/reports-and-papers/mobility-report
2025
-
[14]
C2CCC TR 2052: Survey on ITS-G5 CAM Statistics,
Car2Car Communication Consortium, “C2CCC TR 2052: Survey on ITS-G5 CAM Statistics,” Tech. Rep., 2019. [Online]. Available: https://www.car-2-car.org/
2052
-
[15]
2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC) , author =
A. Kotsi, E. Mitsakis, and D. Tzanis, “Overview of C-ITS deployment projects in Europe and USA,” inProc. 23rd IEEE Int. Conf. Intell. Transp. Syst. (ITSC), Sep. 2020, pp. 1–6, doi: 10.1109/ITSC45102.2020.9294441
-
[16]
Cooperative intelligent transport systems in Europe: Current deployment status and outlook,
K. Sj ¨oberg, P. Andres, T. Buburuzan, and A. Brakemeier, “Cooperative intelligent transport systems in Europe: Current deployment status and outlook,”IEEE Veh. Technol. Mag., vol. 12, no. 2, pp. 89–97, Jun. 2017, doi: 10.1109/MVT.2017.2670018
-
[17]
Saving Lives with Connectivity: A Plan to Accelerate V2X Deployment,
U.S. Department of Transportation, “Saving Lives with Connectivity: A Plan to Accelerate V2X Deployment,” Feb. 2024. [Online]. Available: https://www.transportation.gov/
2024
-
[18]
Performance evaluation of cooperative driving automation services enabled by edge roadside units,
U.-S. Jung and C. Mun, “Performance evaluation of cooperative driving automation services enabled by edge roadside units,”Sensors, vol. 26, no. 2, art. no. 504, Jan. 2026, doi: 10.3390/s26020504
-
[19]
The surprising effectiveness of PPO in cooperative multi-agent games,
C. Yu, A. Velu, E. Vinitsky, J. Gao, Y . Wang, A. Bayen, and Y . Wu, “The surprising effectiveness of PPO in cooperative multi-agent games,” inAdv. Neural Inf. Process. Syst. (NeurIPS), vol. 35, Nov. 2022, pp. 24611–24624
2022
-
[20]
Scaling multi-agent reinforcement learning with selective parameter sharing,
F. Christianos, G. Papoudakis, A. Rahman, and S. V . Albrecht, “Scaling multi-agent reinforcement learning with selective parameter sharing,” inProc. 38th Int. Conf. Mach. Learn. (ICML), inProc. Mach. Learn. Res., vol. 139, Jul. 2021, pp. 1989–1998
2021
-
[21]
Technical Specification 38.214: NR; Physical Layer Procedures for Data,
3GPP, “Technical Specification 38.214: NR; Physical Layer Procedures for Data,” Release 19, v19.3.0, Mar. 2026. [Online]. Available: https://www.3gpp.org/ftp/Specs/archive/38 series/38.214/
2026
-
[22]
Technical Specification 38.331: NR; Radio Resource Control (RRC) Protocol Specification,
3GPP, “Technical Specification 38.331: NR; Radio Resource Control (RRC) Protocol Specification,” Release 19, v19.2.0, Mar. 2026. [Online]. Available: https://www.3gpp.org/ftp/Specs/archive/38 series/38.331/
2026
-
[23]
Technical Report 37.885: Study on Evaluation Methodology of New Vehicle-to-Everything (V2X) Use Cases for LTE and NR,
3GPP, “Technical Report 37.885: Study on Evaluation Methodology of New Vehicle-to-Everything (V2X) Use Cases for LTE and NR,” Release 15, v15.3.0, Jun. 2019. [Online]. Available: https://www.3gpp.org/ftp/Specs/archive/37 series/37.885/
2019
-
[24]
P. Sewalkar and J. Seitz, “Vehicle-to-pedestrian communication for vulnerable road users: Survey, design considerations, and challenges,” Sensors, vol. 19, no. 2, art. no. 358, Jan. 2019, doi: 10.3390/s19020358
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.