ARC: Adaptive Robust Joint State and Covariance Estimation
Pith reviewed 2026-06-26 17:17 UTC · model grok-4.3
The pith
A block-coordinate descent method jointly estimates state and inlier covariance from outlier-corrupted measurements without manual tuning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
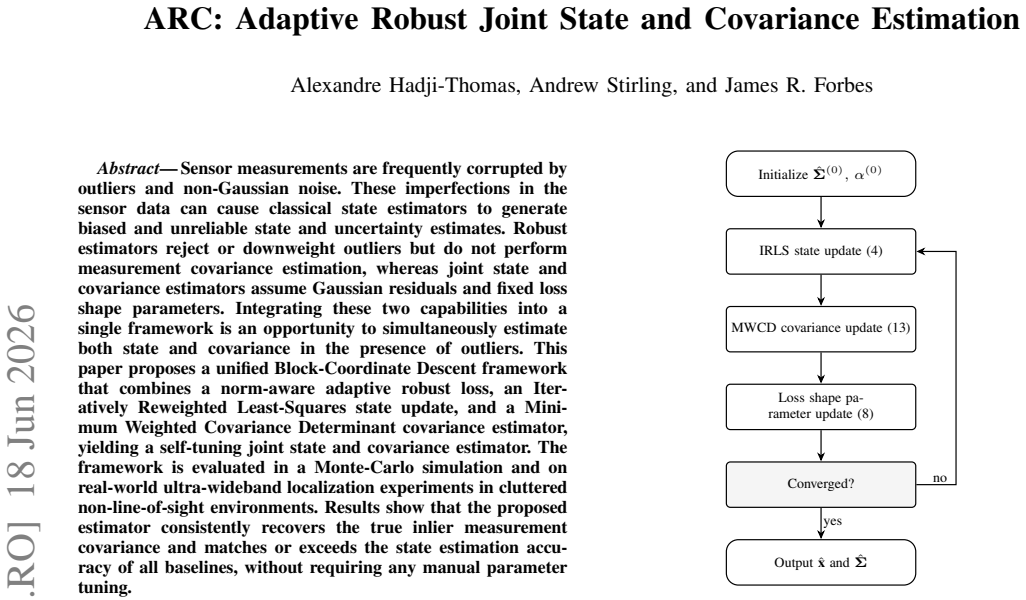
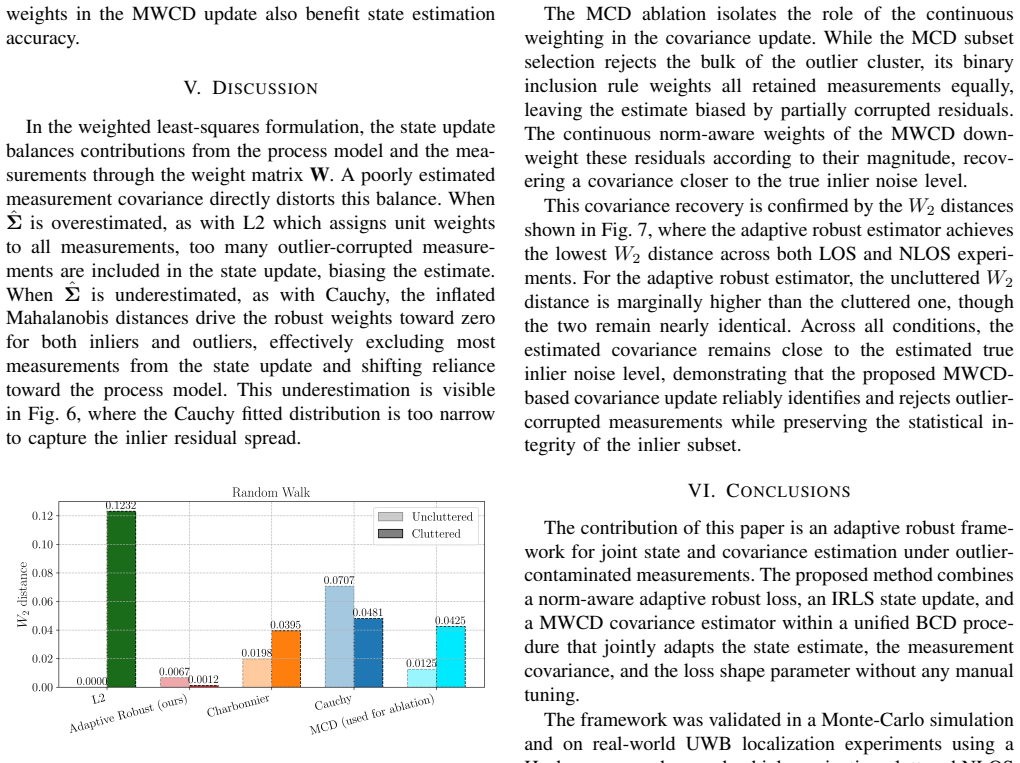
The ARC estimator alternates, inside a block-coordinate descent loop, between an iteratively reweighted least-squares state update that uses a norm-aware adaptive robust loss and a minimum weighted covariance determinant step that estimates the inlier measurement covariance. In Monte-Carlo simulations with known ground truth and in real ultra-wideband experiments conducted in non-line-of-sight environments, the procedure recovers the true inlier covariance and produces state estimates whose accuracy matches or exceeds that of all compared baselines.
What carries the argument
Block-coordinate descent loop that interleaves a norm-aware adaptive robust loss, iteratively reweighted least-squares state updates, and minimum weighted covariance determinant covariance estimation.
If this is right
- The estimator produces usable covariance values for downstream uncertainty-aware tasks without separate tuning.
- State accuracy remains competitive with hand-tuned robust methods across both simulated and real non-line-of-sight data.
- No loss-shape or covariance-initialization parameters need to be chosen by the user.
- The same framework applies to other sensor-fusion problems that suffer from occasional bad readings.
Where Pith is reading between the lines
- Making the descent recursive could allow the estimator to track slowly changing covariances in long-running deployments.
- The per-measurement weighting produced by the adaptive loss may be reusable inside other filtering architectures.
- Testing the method on heavy-tailed or multimodal noise beyond the paper's ultra-wideband case would clarify its range of applicability.
Load-bearing premise
The descent procedure reaches a fixed point that correctly separates inliers from outliers and recovers the true covariance of the inliers.
What would settle it
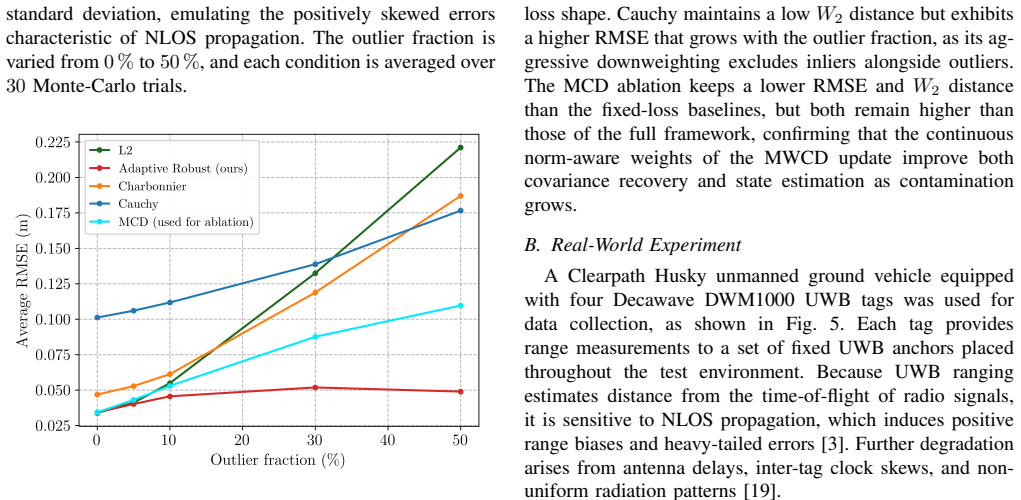
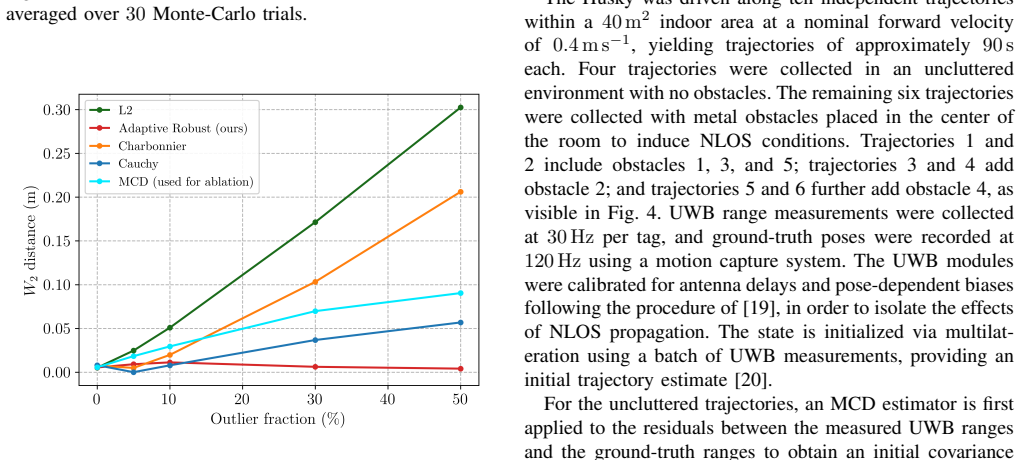
Generate Monte-Carlo trials with a known true inlier covariance and a controlled fraction of outliers; if the estimated covariance matrix fails to converge to the ground-truth inlier covariance on a majority of trials, the recovery claim is false.
Figures

read the original abstract
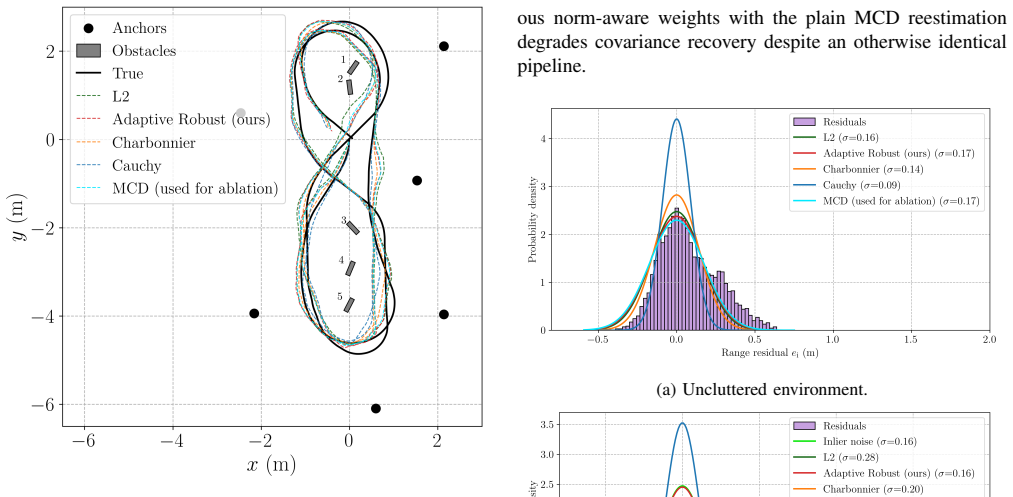
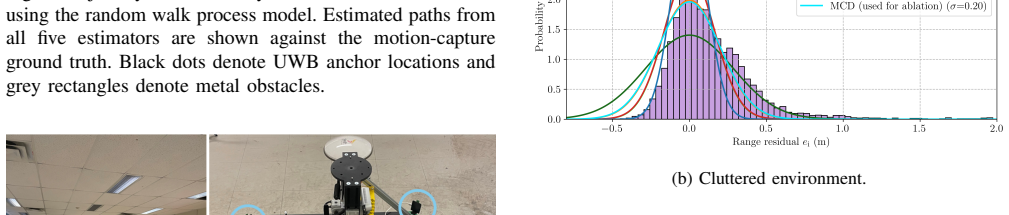
Sensor measurements are frequently corrupted by outliers and non-Gaussian noise. These imperfections in the sensor data can cause classical state estimators to generate biased and unreliable state and uncertainty estimates. Robust estimators reject or downweight outliers but do not perform measurement covariance estimation, whereas joint state and covariance estimators assume Gaussian residuals and fixed loss shape parameters. Integrating these two capabilities into a single framework is an opportunity to simultaneously estimate both state and covariance in the presence of outliers. This paper proposes a unified Block-Coordinate Descent framework that combines a norm-aware adaptive robust loss, an Iteratively Reweighted Least-Squares state update, and a Minimum Weighted Covariance Determinant covariance estimator, yielding a self-tuning joint state and covariance estimator. The framework is evaluated in a Monte-Carlo simulation and on real-world ultra-wideband localization experiments in cluttered non-line-of-sight environments. Results show that the proposed estimator consistently recovers the true inlier measurement covariance and matches or exceeds the state estimation accuracy of all baselines, without requiring any manual parameter tuning.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes ARC, a Block-Coordinate Descent (BCD) framework integrating a norm-aware adaptive robust loss, Iteratively Reweighted Least-Squares (IRLS) state estimation, and Minimum Weighted Covariance Determinant (MWCD) covariance estimation. It claims to deliver a self-tuning joint state-covariance estimator that consistently recovers the true inlier measurement covariance and matches or exceeds baseline state estimation accuracy in Monte-Carlo simulations and real ultra-wideband (UWB) localization experiments in cluttered NLOS settings, without manual parameter tuning.
Significance. If the convergence and recovery properties hold across regimes, the approach would address a practical gap in robotics by unifying robust outlier handling with covariance estimation in a parameter-free manner, potentially improving reliability of state estimators in outlier-prone sensor data such as UWB or LiDAR.
major comments (2)
- [§3] §3 (BCD framework): The central claim of consistent inlier separation and true covariance recovery depends on the alternating IRLS + MWCD updates reaching a fixed point that correctly classifies measurements. No convergence analysis, contraction mapping, breakdown-point conditions for MWCD, or initialization sensitivity study is provided, leaving open the possibility that reported Monte-Carlo and UWB results reflect favorable convergence rather than guaranteed behavior.
- [§5] §5 (Experiments): The abstract states that the estimator 'consistently recovers the true inlier measurement covariance,' yet the evaluation sections do not report the fraction of trials in which covariance recovery fails, the effect of different initializations on the BCD iterates, or quantitative comparison of estimated versus ground-truth inlier covariances beyond aggregate accuracy metrics.
minor comments (2)
- [Abstract and §3] The abstract and method sections would benefit from an explicit statement of the stopping criterion and maximum iteration count used for the BCD loop.
- [§3] Notation for the adaptive loss shape parameter and the MWCD weighting matrix should be introduced once and used consistently to avoid reader confusion across equations.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments point-by-point below and will revise the manuscript accordingly to strengthen the presentation of the BCD framework and experimental results.
read point-by-point responses
-
Referee: [§3] §3 (BCD framework): The central claim of consistent inlier separation and true covariance recovery depends on the alternating IRLS + MWCD updates reaching a fixed point that correctly classifies measurements. No convergence analysis, contraction mapping, breakdown-point conditions for MWCD, or initialization sensitivity study is provided, leaving open the possibility that reported Monte-Carlo and UWB results reflect favorable convergence rather than guaranteed behavior.
Authors: We agree that the manuscript lacks a formal convergence analysis for the BCD iterates. The framework builds on established IRLS and MWCD procedures whose individual convergence properties are known in the literature, and our empirical results across Monte-Carlo trials and UWB data show consistent fixed-point behavior. In revision we will add a dedicated subsection discussing convergence conditions drawn from the robust estimation literature, breakdown-point considerations for MWCD, and an initialization sensitivity study using multiple random starts on the simulation suite. revision: yes
-
Referee: [§5] §5 (Experiments): The abstract states that the estimator 'consistently recovers the true inlier measurement covariance,' yet the evaluation sections do not report the fraction of trials in which covariance recovery fails, the effect of different initializations on the BCD iterates, or quantitative comparison of estimated versus ground-truth inlier covariances beyond aggregate accuracy metrics.
Authors: The abstract claim is supported by the reported trials in which the recovered covariance matched ground truth within the presented Monte-Carlo and UWB results. We acknowledge that failure rates, initialization effects, and direct covariance error metrics were not quantified. In the revision we will augment §5 with (i) the fraction of trials achieving successful covariance recovery, (ii) results from varied initializations, and (iii) explicit tables or plots comparing estimated versus ground-truth inlier covariances. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces a Block-Coordinate Descent framework that integrates an adaptive robust loss, IRLS state updates, and MWCD covariance estimation as a novel combination for joint estimation. The central claims rest on empirical evaluation in Monte-Carlo simulations and real UWB experiments rather than any derivation that reduces outputs to inputs by construction. No self-definitional equations, fitted inputs renamed as predictions, or load-bearing self-citations appear in the provided abstract or description; the method is presented as self-contained with independent content from its algorithmic components and validation data.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Block-coordinate descent converges to a useful stationary point for the joint objective
Reference graph
Works this paper leans on
-
[1]
T. D. Barfoot,State Estimation for Robotics: Second Edition, 2nd ed. Cambridge University Press, 2024
2024
-
[2]
Joint State and Noise Covariance Estimation,
K. Khosoussi and I. Shames, “Joint State and Noise Covariance Estimation,” inProceedings of Robotics: Science and Systems, Los Angeles, CA, USA, 2025
2025
-
[3]
NLOS identification and mitigation for UWB localization systems,
I. Guvenc, C.-C. Chong, and F. Watanabe, “NLOS identification and mitigation for UWB localization systems,” in2007 IEEE Wireless Communications and Networking Conference, 2007, pp. 1571–1576
2007
-
[4]
Robust Estimation of a Location Parameter,
P. J. Huber, “Robust Estimation of a Location Parameter,”The Annals of Mathematical Statistics, vol. 35, no. 1, pp. 73 –101, 1964
1964
-
[5]
On the unification of line processes, outlier rejection, and robust statistics with applications in early vision,
M. J. Black and A. Rangarajan, “On the unification of line processes, outlier rejection, and robust statistics with applications in early vision,”International Journal of Computer Vision, vol. 19, pp. 57–91, Jul. 1996
1996
-
[6]
At all costs: A comparison of robust cost functions for camera correspondence outliers,
K. MacTavish and T. D. Barfoot, “At all costs: A comparison of robust cost functions for camera correspondence outliers,” in2015 12th Conference on Computer and Robot Vision, 2015, pp. 62–69
2015
-
[7]
A general and adaptive robust loss function,
J. T. Barron, “A general and adaptive robust loss function,” in2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019, pp. 4326–4334
2019
-
[8]
Adaptive robust kernels for non-linear least squares problems,
N. Chebrolu, T. L ¨abe, O. Vysotska, J. Behley, and C. Stachniss, “Adaptive robust kernels for non-linear least squares problems,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2240–2247, 2021
2021
-
[9]
Mind the gap: Norm-aware adaptive robust loss for multivariate least-squares problems,
T. Hitchcox and J. R. Forbes, “Mind the gap: Norm-aware adaptive robust loss for multivariate least-squares problems,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 7116–7123, 2022
2022
-
[10]
Adaptive estimation using gaussian mixtures,
T. Pfeifer, “Adaptive estimation using gaussian mixtures,” PhD thesis, Chemnitz University of Technology, 2023
2023
-
[11]
Anomaly detection by robust statistics,
P. J. Rousseeuw and M. Hubert, “Anomaly detection by robust statistics,”WIREs Data Mining and Knowledge Discovery, vol. 8, no. 2, e1236, 2018
2018
-
[12]
The minimum weighted covariance determinant estimator for high-dimensional data,
J. Kalina and J. Tichavsk ´y, “The minimum weighted covariance determinant estimator for high-dimensional data,”Advances in Data Analysis and Classification, vol. 16, pp. 977–999, 2022
2022
-
[13]
Convergence of a block coordinate descent method for nondifferentiable minimization,
P. Tseng, “Convergence of a block coordinate descent method for nondifferentiable minimization,”Journal of Optimization Theory and Applications, vol. 109, pp. 475–494, Jan. 2001
2001
-
[14]
Forbes, M
C. Forbes, M. Evans, N. Hastings, and B. Peacock,Statistical Distributions. Wiley, 2011
2011
-
[15]
Robust regression using iteratively reweighted least-squares,
P. W. Holland and R. E. Welsch, “Robust regression using iteratively reweighted least-squares,”Communications in Statistics - Theory and Methods, vol. 6, no. 9, pp. 813–827, 1977
1977
-
[16]
Boyd and L
S. Boyd and L. Vandenberghe,Convex Optimization. Cambridge University Press, 2004
2004
-
[17]
Computational Optimal Transport , year =
G. Peyr ´e and M. Cuturi,Computational optimal transport, 2020. arXiv:1803.00567 [stat.ML]
-
[18]
Navlie: A python package for state estimation on lie groups,
C. C. Cossette, M. Cohen, V . Korotkine, A. Del Castillo Bernal, M. A. Shalaby, and J. R. Forbes, “Navlie: A python package for state estimation on lie groups,” in2023 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS), 2023, pp. 5282–5287
2023
-
[19]
Calibration and uncertainty characterization for ultra-wideband two- way-ranging measurements,
M. A. Shalaby, C. C. Cossette, J. R. Forbes, and J. Le Ny, “Calibration and uncertainty characterization for ultra-wideband two- way-ranging measurements,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 4128–4134
2023
-
[20]
Position-location solutions by taylor-series estimation,
W. H. Foy, “Position-location solutions by taylor-series estimation,” IEEE Transactions on Aerospace and Electronic Systems, vol. AES- 12, no. 2, pp. 187–194, 1976
1976
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.