Tracking the Turn: Mamba-Powered Human Orientation Detection using UWB
Pith reviewed 2026-06-26 01:17 UTC · model grok-4.3
The pith
A bidirectional Mamba model extracts human yaw orientation directly from UWB channel impulse responses recorded at fixed anchors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
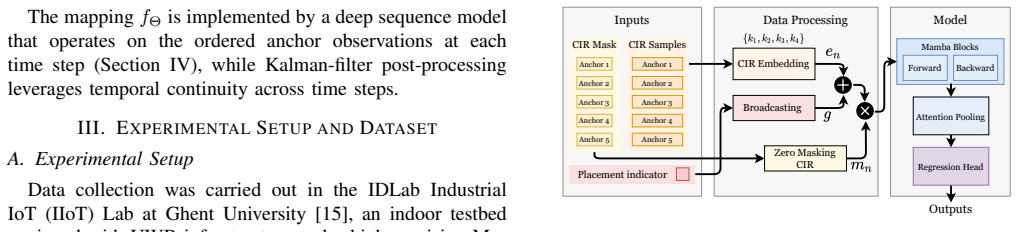
Yaw orientation is predicted from UWB channel impulse responses at fixed anchors receiving transmissions from one wearable tag by applying a bidirectional Mamba architecture that scans forward and backward across anchor observations, using per-anchor CIR inputs and a body-part conditioning module, with two Kalman filter stages for temporal smoothing that together achieve 38.6 degrees raw error and 18.9 degrees after the location-based filter.
What carries the argument
Bidirectional Mamba architecture that performs forward and backward recurrent scans across per-anchor channel impulse responses while conditioned on body-part tag placement.
If this is right
- A single wearable tag supplies both position and orientation estimates without extra sensors.
- The location-based Kalman filter reduces raw neural network error by 51 percent by adding heading corrections from position data.
- The per-anchor conditioning allows the same model to handle multiple possible tag placements on the body.
- Performance holds across varied scenarios when the full pipeline including the location filter is used.
Where Pith is reading between the lines
- Existing UWB positioning deployments could add orientation output by running the Mamba model on the same anchor data without new hardware.
- The approach may extend to tracking additional body angles if more CIR features or multiple tags are incorporated.
- Battery and comfort constraints in wearable applications would decrease because no separate IMU is required.
Load-bearing premise
The UWB channel impulse responses recorded at fixed anchors contain sufficient information about body yaw that can be extracted by a bidirectional Mamba network conditioned on tag placement.
What would settle it
Collecting new UWB CIR data in an unseen room layout or with an untested tag placement on the body and measuring whether the location-based Kalman filtered mean absolute error stays at or below 18.9 degrees.
Figures
read the original abstract
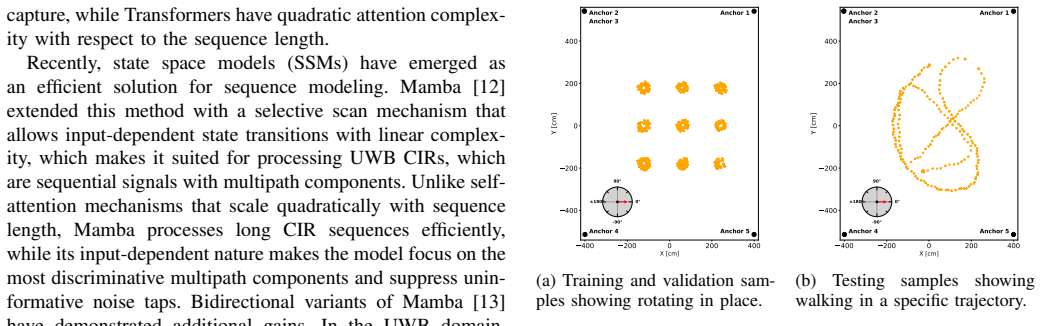
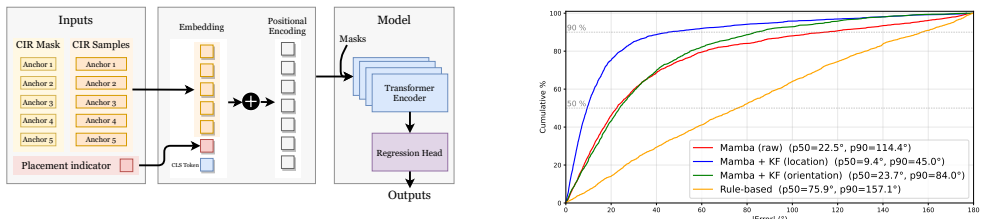
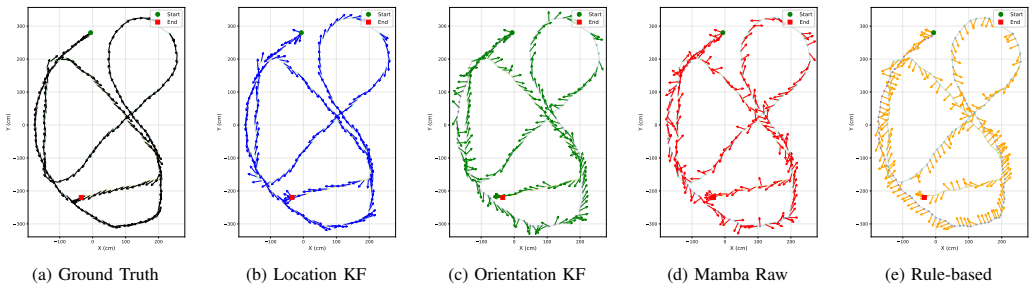
User orientation is crucial for many context-aware applications, including interactive museum experiences, smart door access, and intuitive human-environment interaction. However, most existing indoor localization systems focus on estimating position, while body orientation is typically assigned to secondary devices such as inertial measurement units. In this paper, we propose a purely UWB-based approach that predicts yaw orientation directly from UWB Channel Impulse Response (CIR) measurements recorded at fixed anchors as they receive transmissions from a single wearable tag. We use a bidirectional Mamba architecture that captures dependencies across the anchor observations through forward and backward recurrent scans. The model uses per-anchor CIR and a body-part conditioning module to adapt the representation to different tag placements on the body. Two different Kalman filters are used as post-processing stages to exploit temporal continuity: an orientation-based filter that smooths the neural network predictions, and a location-based filter that additionally incorporates position-derived heading corrections. We evaluated the model's performance in different scenarios to ensure generalizability. The proposed Mamba model achieves a mean absolute error of 38.6 degrees in its raw form, outperforming a rule-based baseline of 49.5 degrees. With the location-based Kalman filter, the error is further reduced to 18.9 degrees, corresponding to a 51% reduction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a UWB-only method for estimating human yaw orientation from channel impulse responses (CIR) measured at fixed anchors receiving transmissions from a single wearable tag. It employs a bidirectional Mamba network with per-anchor CIR processing and body-part conditioning, followed by two Kalman filter post-processors (orientation-based and location-based). The central empirical claim is that the raw Mamba model achieves 38.6° MAE, outperforming a 49.5° rule-based baseline, and that the location-based Kalman filter further reduces error to 18.9° (51% improvement).
Significance. If the performance numbers are reproducible, the approach would demonstrate that UWB CIR alone can support usable orientation estimation without IMUs, which is relevant for context-aware indoor systems. The bidirectional Mamba choice for modeling anchor dependencies is a reasonable architectural decision given recent sequence-modeling advances, and the dual Kalman-filter post-processing is a practical engineering contribution.
major comments (2)
- [Abstract] Abstract: The reported MAE values (38.6° raw, 18.9° with location-based KF) are presented without any accompanying information on dataset size, number of subjects or environments, training procedure, cross-validation method, or statistical tests. This absence directly undermines the ability to evaluate the central performance claim and its generalizability.
- [Abstract] The premise that per-anchor UWB CIR contains extractable yaw information (via bidirectional Mamba with body-part conditioning) is stated as the modeling foundation, yet no ablation results or feature-importance analysis are referenced to isolate the contribution of the conditioning module versus raw CIR.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment point by point below, indicating where revisions will be made to the abstract and where we maintain the current approach based on the manuscript's focus.
read point-by-point responses
-
Referee: [Abstract] Abstract: The reported MAE values (38.6° raw, 18.9° with location-based KF) are presented without any accompanying information on dataset size, number of subjects or environments, training procedure, cross-validation method, or statistical tests. This absence directly undermines the ability to evaluate the central performance claim and its generalizability.
Authors: We agree that the abstract is brief and would benefit from additional context on the experimental setup. The full manuscript describes the dataset collected from multiple subjects across several indoor environments, the supervised training procedure, and the use of cross-validation for evaluation, with MAE as the reported metric. We will revise the abstract to include a concise summary of the dataset size, number of subjects, environments, and evaluation approach. revision: yes
-
Referee: [Abstract] The premise that per-anchor UWB CIR contains extractable yaw information (via bidirectional Mamba with body-part conditioning) is stated as the modeling foundation, yet no ablation results or feature-importance analysis are referenced to isolate the contribution of the conditioning module versus raw CIR.
Authors: The bidirectional Mamba with body-part conditioning forms the core architecture for processing per-anchor CIR to extract yaw, and its validity is supported by the 38.6° MAE outperforming the 49.5° rule-based baseline. The manuscript does not include ablation studies or feature-importance analysis isolating the conditioning module, as the emphasis is on the integrated end-to-end performance rather than component-wise decomposition. We do not intend to add such analysis, as it is not required to substantiate the central claims. revision: no
Circularity Check
No significant circularity; empirical results from model training on measured data
full rationale
The manuscript describes an empirical ML pipeline: a bidirectional Mamba network is trained on recorded UWB CIR traces from fixed anchors to regress yaw, with body-part conditioning and two post-hoc Kalman filters. Reported MAEs (38.6° raw, 18.9° filtered) are direct evaluation outcomes on held-out measurements, not quantities obtained by fitting a parameter and then renaming the fit as a prediction. No equations, self-definitional loops, or load-bearing self-citations appear in the supplied text; the central claim rests on the observable correlation between CIR and orientation, which is tested rather than presupposed by construction. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- Mamba model weights and training hyperparameters
axioms (2)
- domain assumption UWB channel impulse response measurements contain extractable information about body yaw orientation
- domain assumption Orientation estimates exhibit temporal continuity that Kalman filters can exploit
Reference graph
Works this paper leans on
-
[1]
Al-Ammar, and Hend S
Abdulrahman Alarifi, AbdulMalik Al-Salman, Mansour Alsaleh, Ah- mad Alnafessah, Suheer Al-Hadhrami, Mai A. Al-Ammar, and Hend S. Al-Khalifa. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances.Sensors, 16(5), 2016
2016
-
[2]
Estimation of orientation in a dual-tag ultra wideband indoor positioning system
Oscar Johansson and Lucas Wass ´enius. Estimation of orientation in a dual-tag ultra wideband indoor positioning system. Master’s thesis, Uppsala University, 2019
2019
-
[3]
Accurate Joint Estimation of Position and Orientation Based on Angle of Arrival and Two-Way Ranging of Ultra-Wideband Technology.Electronics, 14(3), 2025
Di Zhang, Hongbiao Xu, Li Zhan, Ye Li, Guangqiang Yin, and Xinzhong Wang. Accurate Joint Estimation of Position and Orientation Based on Angle of Arrival and Two-Way Ranging of Ultra-Wideband Technology.Electronics, 14(3), 2025. 100 0 100 200 X (cm) 300 200 100 0 100 200 300 Y (cm) Start End (a) Ground Truth 100 0 100 200 X (cm) 300 200 100 0 100 200 300 ...
2025
-
[4]
Robust imu-based mitigation of human body shadowing in uwb indoor positioning.Sensors, 23(19), 2023
Cedric De Cock, Emmeric Tanghe, Wout Joseph, and David Plets. Robust imu-based mitigation of human body shadowing in uwb indoor positioning.Sensors, 23(19), 2023
2023
-
[5]
ObjectTrack: 6DoF Object Tracking Through UWB-IMU Fusion
Fan Jiang, Frank Dellaert, and Ashutosh Dhekne. ObjectTrack: 6DoF Object Tracking Through UWB-IMU Fusion. In2025 International Conference on Indoor Positioning and Indoor Navigation (IPIN), pages 1–6, 2025
2025
-
[6]
Ultra-Wideband Based Pose Estimation for Small Unmanned Aerial Vehicles.IEEE Access, 6:57526–57535, 2018
Michael Strohmeier, Thomas Walter, Julian Rothe, and Sergio Mon- tenegro. Ultra-Wideband Based Pose Estimation for Small Unmanned Aerial Vehicles.IEEE Access, 6:57526–57535, 2018
2018
-
[7]
Fusion-Based Localization System Integrating UWB, IMU, and Vision
Zhongliang Deng, Haiming Luo, Xiangchuan Gao, and Peijia Liu. Fusion-Based Localization System Integrating UWB, IMU, and Vision. Applied Sciences, 15(12), 2025
2025
-
[8]
Rethinking Orientation Estimation with Smartphone-equipped Ultra- wideband Chips
Hao Zhou, Kuang Yuan, Mahanth Gowda, Lili Qiu, and Jie Xiong. Rethinking Orientation Estimation with Smartphone-equipped Ultra- wideband Chips. InProceedings of the 30th Annual International Conference on Mobile Computing and Networking, ACM MobiCom ’24, page 1045–1059, New York, NY , USA, 2024. Association for Computing Machinery
2024
-
[9]
UWBOri: Enabling Accurate Orientation Estimation with Ultra-wideband Signals
Zhaoxin Chang, Fusang Zhang, Jie Xiong, Xinyu Xue, Zeyu Wang, Badii Jouaber, and Daqing Zhang. UWBOri: Enabling Accurate Orientation Estimation with Ultra-wideband Signals. In2024 IEEE Smart World Congress (SWC), pages 386–393, 2024
2024
-
[10]
Application of a long short-term memory neural network algorithm fused with kalman filter in UWB indoor positioning.Scientific Reports, 14(1):1925, jan 2024
Yalin Tian, Zengzeng Lian, Penghui Wang, Mengqi Wang, Zhe Yue, and Huabin Chai. Application of a long short-term memory neural network algorithm fused with kalman filter in UWB indoor positioning.Scientific Reports, 14(1):1925, jan 2024
1925
-
[11]
Non-line- of-sight identification method for ultra-wide band based on dual-branch feature fusion transformer.Information, 16(12), 2025
Guangyong Xi, Shuaiyang Hu, Jing Wang, and Dongyao Zou. Non-line- of-sight identification method for ultra-wide band based on dual-branch feature fusion transformer.Information, 16(12), 2025
2025
-
[12]
Mamba: Linear-time sequence modeling with selective state spaces, 2024
Albert Gu and Tri Dao. Mamba: Linear-time sequence modeling with selective state spaces, 2024
2024
-
[13]
Hosseini, and Dimitris Samaras
Jingwei Zhang, Xi Han, Hong Qin, Mahdi S. Hosseini, and Dimitris Samaras. Lbmamba: Locally bi-directional mamba, 2025
2025
-
[14]
Lightmamba: A resource-efficient deep-learning method for uwb nlos identification based on selective state-space modeling.IEEE Internet of Things Journal, 13(5):8735–8748, 2026
Tao Wang, Yuanming Shu, Lulu Qiao, Dong Ding, and Guangxue Li. Lightmamba: A resource-efficient deep-learning method for uwb nlos identification based on selective state-space modeling.IEEE Internet of Things Journal, 13(5):8735–8748, 2026
2026
-
[15]
Industrial iot lab
IDLab. Industrial iot lab. https://idlab.ugent.be/resources/ industrial-iot-lab, 2026. [Accessed: April 8, 2026]
2026
-
[16]
Wi-PoS: A Low-Cost, Open Source Ultra-Wideband (UWB) Hardware Platform with Long Range Sub-GHz Backbone.Sensors, 19(7), 2019
Ben Van Herbruggen, Bart Jooris, Jen Rossey, Matteo Ridolfi, Nicola Macoir, Quinten Van den Brande, Sam Lemey, and Eli De Poorter. Wi-PoS: A Low-Cost, Open Source Ultra-Wideband (UWB) Hardware Platform with Long Range Sub-GHz Backbone.Sensors, 19(7), 2019
2019
-
[17]
Rong Li, and Thiagalingam Kirubarajan.Es- timation with Applications to Tracking and Navigation
Yaakov Bar-Shalom, X. Rong Li, and Thiagalingam Kirubarajan.Es- timation with Applications to Tracking and Navigation. John Wiley & Sons, New York, 2001
2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.