SOCC-ICP: Semantics-Assisted Odometry based on Occupancy Grids and ICP
Pith reviewed 2026-06-30 20:12 UTC · model grok-4.3
The pith
SOCC-ICP performs LiDAR odometry and semantic occupancy grid mapping inside one shared voxel structure.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
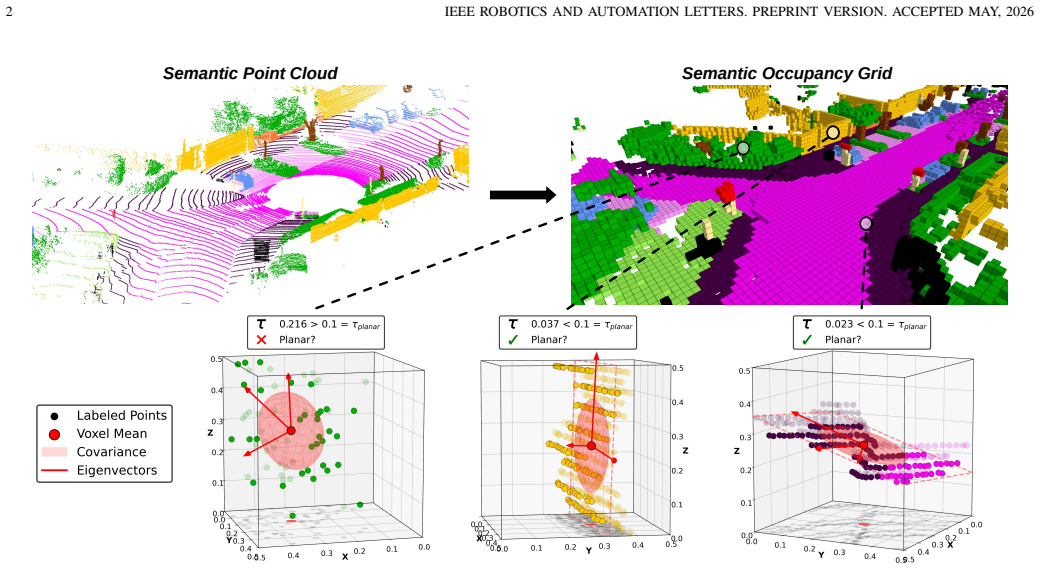
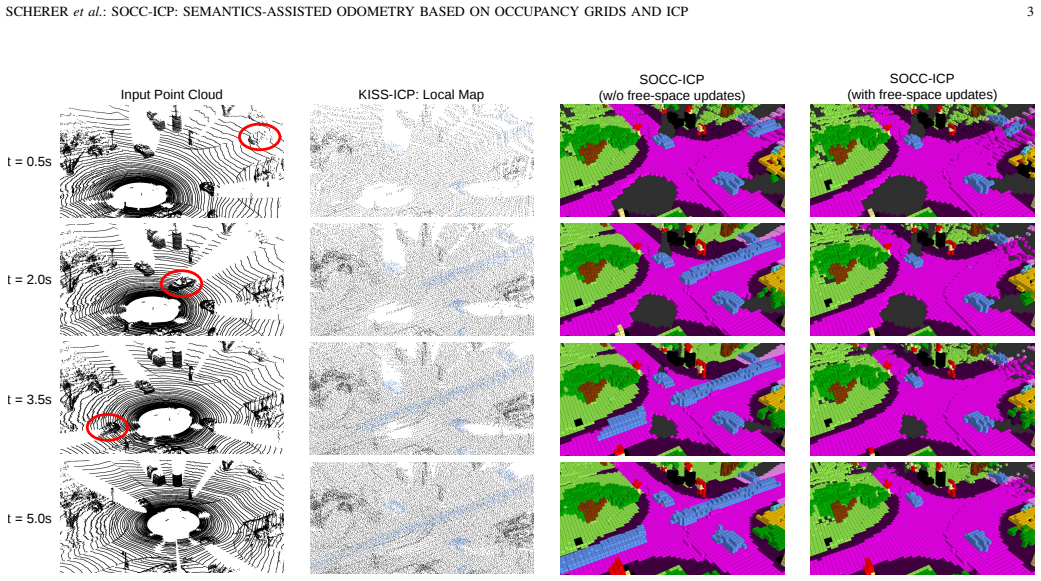
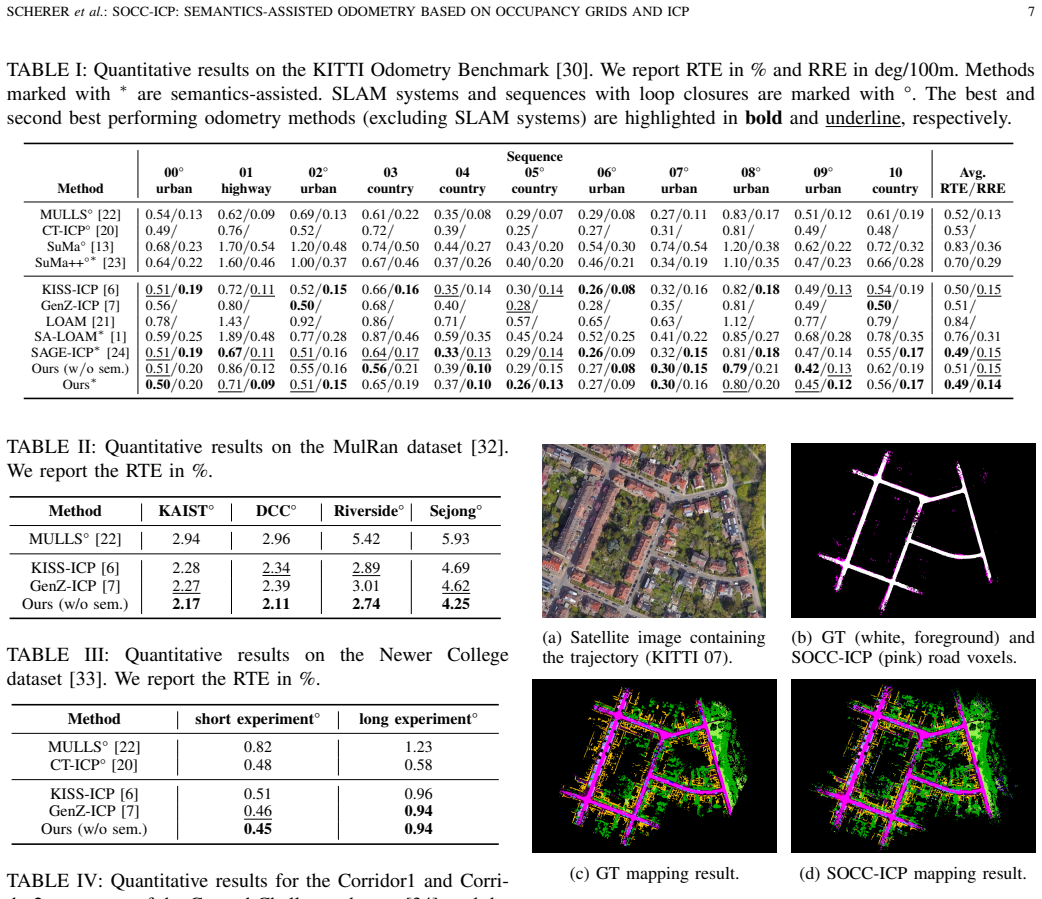
SOCC-ICP jointly executes semantic occupancy grid mapping and LiDAR scan alignment by letting each voxel encode geometric and semantic statistics; this representation supports adaptive selection of point-to-point or point-to-plane ICP, filters dynamic objects via raycasting, and directly supplies a map usable for robotic planning, achieving competitive accuracy that improves further when semantic cues are incorporated.
What carries the argument
The semantic occupancy grid voxel that stores both geometric and semantic statistics to drive adaptive ICP selection and raycasting-based dynamic filtering.
If this is right
- The resulting occupancy grid can be passed directly to motion planners without additional map conversion.
- Performance remains competitive in geometrically degenerate environments even when semantic labels are absent.
- Adding semantic labels improves accuracy through better downsampling and correspondence weighting.
- A single map representation removes the need to maintain separate point-cloud or surfel structures for odometry.
Where Pith is reading between the lines
- Robotic software stacks could drop one layer of map synchronization code.
- The same voxel structure might support incremental semantic segmentation updates across multiple sensors.
- Long-term operation in crowded scenes would test whether the raycasting filter accumulates enough free-space evidence to keep drift low.
Load-bearing premise
The method assumes raycasting free-space updates will reliably remove dynamic objects and that local planarity statistics will correctly choose between ICP variants without causing alignment errors in mixed scenes.
What would settle it
Odometry error rising above baseline methods on a sequence containing many independently moving objects that raycasting fails to clear from the grid.
Figures
read the original abstract
Reliable pose estimation in previously unseen environments is a fundamental capability of autonomous systems. Existing LiDAR odometry methods typically employ point-, surfel-, or NDT-based map representations, which are distinct from the semantic occupancy grids commonly used for downstream tasks such as motion planning. We introduce SOCC-ICP, a semantics-assisted odometry framework that jointly performs Semantic OCCupancy grid mapping and LiDAR scan alignment. Each map voxel encodes geometric and semantic statistics, enabling adaptive point-to-point or point-to-plane ICP based on local planarity. Further, the occupancy grid naturally filters dynamic objects through raycasting-based free-space updates. Across diverse evaluation scenarios, SOCC-ICP achieves performance competitive with state-of-the-art LiDAR odometry and remains robust in geometrically degenerate environments, even in the absence of semantic cues. When semantic labels are available, integrating them into map construction, downsampling, and correspondence weighting yields further accuracy gains. By unifying odometry and semantic occupancy grid mapping within a single representation, SOCC-ICP eliminates redundant map structures and directly provides a map suitable for downstream robotic applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces SOCC-ICP, a semantics-assisted LiDAR odometry framework that performs joint semantic occupancy grid mapping and scan alignment within a single voxel-based representation. Each voxel encodes geometric and semantic statistics to support adaptive selection between point-to-point and point-to-plane ICP according to local planarity, while raycasting-based free-space updates are used to filter dynamic objects. The paper claims that this unified approach achieves performance competitive with state-of-the-art LiDAR odometry methods across diverse scenarios, remains robust in geometrically degenerate environments even without semantic cues, yields further gains when semantics are available, and directly supplies a map usable for downstream tasks without redundant structures.
Significance. If the empirical claims hold, the work would be significant for robotics by addressing the typical separation between odometry representations (points, surfels, NDT) and planning representations (occupancy grids). A single structure that supports both accurate pose estimation and downstream usability could reduce system complexity. The adaptive ICP mechanism and dynamic filtering via raycasting are conceptually appealing, but their contribution to the unification claim requires concrete validation that is not evident from the provided description.
major comments (2)
- [Abstract and §5] Abstract and §5 (Evaluation): the central claim of 'performance competitive with state-of-the-art' and 'robustness in geometrically degenerate environments' is asserted without any reported error metrics (RMSE, ATE, RPE), dataset names, sequence counts, or quantitative baseline comparisons. This absence prevents assessment of whether the unification actually delivers the stated benefits.
- [§3] §3 (Method): the unification premise rests on two unverified mechanisms—raycasting reliably marking dynamic points as free space and local planarity statistics correctly selecting ICP modes. No ablation studies, failure-case analysis under partial occlusion or fast motion, or sensitivity tests on planarity thresholds are described; failure of either mechanism would simultaneously degrade both odometry and map quality.
minor comments (2)
- [§3.1] The description of voxel encoding for geometric/semantic statistics lacks explicit notation or pseudocode, making it difficult to reproduce the per-voxel update rules.
- [§4] No mention of computational overhead (memory per voxel, raycasting cost) relative to separate odometry + mapping pipelines, which would be needed to substantiate the 'eliminates redundant map structures' claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments correctly identify areas where the manuscript requires additional quantitative detail and validation to support its claims. We address each point below and will revise accordingly.
read point-by-point responses
-
Referee: [Abstract and §5] Abstract and §5 (Evaluation): the central claim of 'performance competitive with state-of-the-art' and 'robustness in geometrically degenerate environments' is asserted without any reported error metrics (RMSE, ATE, RPE), dataset names, sequence counts, or quantitative baseline comparisons. This absence prevents assessment of whether the unification actually delivers the stated benefits.
Authors: We agree that explicit quantitative results are necessary to substantiate the performance claims. The revised manuscript will include RMSE, ATE, and RPE metrics on standard datasets (e.g., KITTI sequences with specified counts), along with direct numerical comparisons to baselines such as LOAM and LeGO-LOAM. This will enable assessment of the unification benefits. revision: yes
-
Referee: [§3] §3 (Method): the unification premise rests on two unverified mechanisms—raycasting reliably marking dynamic points as free space and local planarity statistics correctly selecting ICP modes. No ablation studies, failure-case analysis under partial occlusion or fast motion, or sensitivity tests on planarity thresholds are described; failure of either mechanism would simultaneously degrade both odometry and map quality.
Authors: The referee is correct that the mechanisms require explicit validation. We will add ablation studies quantifying the impact of raycasting-based free-space updates for dynamic filtering and the planarity-driven ICP mode selection. The revision will also include failure-case analysis under occlusion/fast motion and sensitivity tests on the planarity threshold. revision: yes
Circularity Check
No circularity: method is a high-level framework without load-bearing derivations or self-citation chains.
full rationale
The paper presents SOCC-ICP as a practical unification of odometry and semantic occupancy mapping via voxel statistics, raycasting, and adaptive ICP selection. No equations, fitted parameters renamed as predictions, or uniqueness theorems are described in the provided text. The central claim (single representation eliminating redundant maps) is an engineering integration, not a mathematical reduction to its own inputs. Assumptions about raycasting and planarity are stated as design choices but are not derived from prior self-citations in a load-bearing way. This is the common case of a self-contained algorithmic contribution evaluated empirically.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Sa- loam: Semantic-aided lidar slam with loop closure,
L. Li, X. Kong, X. Zhao, W. Li, F. Wen, H. Zhang, and Y . Liu, “Sa- loam: Semantic-aided lidar slam with loop closure,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 7627–7634
2021
-
[2]
Sloam: Semantic lidar odometry and mapping for forest inventory,
S. W. Chen, G. V . Nardari, E. S. Lee, C. Qu, X. Liu, R. A. F. Romero, and V . Kumar, “Sloam: Semantic lidar odometry and mapping for forest inventory,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 612–619, 2020
2020
-
[3]
A lidar-inertial navigation system for uavs in gnss-denied environment with spatial grid structures,
Z. Qiu, J. Lv, D. Lin, Y . Yu, Z. Sun, and Z. Zheng, “A lidar-inertial navigation system for uavs in gnss-denied environment with spatial grid structures,”Applied Sciences, vol. 13, no. 1, p. 414, 2022
2022
-
[4]
Lidar odometry survey: recent advancements and remaining challenges,
D. Lee, M. Jung, W. Yang, and A. Kim, “Lidar odometry survey: recent advancements and remaining challenges,”Intelligent Service Robotics, vol. 17, no. 2, pp. 95–118, 2024
2024
-
[5]
Method for registration of 3-d shapes,
P. J. Besl and N. D. McKay, “Method for registration of 3-d shapes,” inSensor fusion IV: control paradigms and data structures, vol. 1611. Spie, 1992, pp. 586–606
1992
-
[6]
Kiss-icp: In defense of point-to-point icp–simple, accu- rate, and robust registration if done the right way,
I. Vizzo, T. Guadagnino, B. Mersch, L. Wiesmann, J. Behley, and C. Stachniss, “Kiss-icp: In defense of point-to-point icp–simple, accu- rate, and robust registration if done the right way,”IEEE Robotics and Automation Letters, vol. 8, no. 2, pp. 1029–1036, 2023
2023
-
[7]
Genz-icp: Generalizable and degeneracy- robust lidar odometry using an adaptive weighting,
D. Lee, H. Lim, and S. Han, “Genz-icp: Generalizable and degeneracy- robust lidar odometry using an adaptive weighting,”IEEE Robotics and Automation Letters, 2024
2024
-
[8]
A review of global path planning methods for occupancy grid maps regardless of obstacle density,
E. G. Tsardoulias, A. Iliakopoulou, A. Kargakos, and L. Petrou, “A review of global path planning methods for occupancy grid maps regardless of obstacle density,”Journal of intelligent & robotic systems, vol. 84, no. 1, pp. 829–858, 2016
2016
-
[9]
Decentralized multi- agent trajectory planning in dynamic environments with spatiotemporal occupancy grid maps,
S. Wu, G. Chen, M. Shi, and J. Alonso-Mora, “Decentralized multi- agent trajectory planning in dynamic environments with spatiotemporal occupancy grid maps,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 7208–7214
2024
-
[10]
Semantic 3d occupancy mapping through efficient high order crfs,
S. Yang, Y . Huang, and S. Scherer, “Semantic 3d occupancy mapping through efficient high order crfs,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017, pp. 590–597
2017
-
[11]
Robust matching of occupancy maps for odometry in autonomous vehicles
M. D. Dimitrievski, D. Van Hamme, P. Veelaert, and W. Philips, “Robust matching of occupancy maps for odometry in autonomous vehicles.” in VISIGRAPP (3: VISAPP), 2016, pp. 628–635
2016
-
[12]
Occupancy-slam: An efficient and robust algorithm for simultaneously optimizing robot poses and occupancy map,
Y . Wang, L. Zhao, and S. Huang, “Occupancy-slam: An efficient and robust algorithm for simultaneously optimizing robot poses and occupancy map,”IEEE Transactions on Robotics, 2025
2025
-
[13]
Efficient surfel-based slam using 3d laser range data in urban environments
J. Behley and C. Stachniss, “Efficient surfel-based slam using 3d laser range data in urban environments.” inRobotics: science and systems, vol. 2018, 2018, p. 59
2018
-
[14]
Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry,
C. Yuan, W. Xu, X. Liu, X. Hong, and F. Zhang, “Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 8518–8525, 2022
2022
-
[15]
Ndt- loam: A real-time lidar odometry and mapping with weighted ndt and lfa,
S. Chen, H. Ma, C. Jiang, B. Zhou, W. Xue, Z. Xiao, and Q. Li, “Ndt- loam: A real-time lidar odometry and mapping with weighted ndt and lfa,”IEEE Sensors Journal, vol. 22, no. 4, pp. 3660–3671, 2021
2021
-
[16]
Real-time scan-to-map matching localization system based on lightweight pre-built occupancy high-definition map,
J. Wen, J. Tang, H. Liu, C. Qian, and X. Fan, “Real-time scan-to-map matching localization system based on lightweight pre-built occupancy high-definition map,”Remote Sensing, vol. 15, no. 3, p. 595, 2023
2023
-
[17]
Kiss-slam: A simple, robust, and accurate 3d lidar slam system with enhanced generalization capabilities,
T. Guadagnino, B. Mersch, S. Gupta, I. Vizzo, G. Grisetti, and C. Stach- niss, “Kiss-slam: A simple, robust, and accurate 3d lidar slam system with enhanced generalization capabilities,” in2025 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), 2025, pp. 5363–5370
2025
-
[18]
Lsk3dnet: Towards effective and efficient 3d perception with large sparse kernels,
T. Feng, W. Wang, F. Ma, and Y . Yang, “Lsk3dnet: Towards effective and efficient 3d perception with large sparse kernels,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 14 916–14 927
2024
-
[19]
The normal distributions transform: A new approach to laser scan matching,
P. Biber and W. Straßer, “The normal distributions transform: A new approach to laser scan matching,” inProceedings 2003 IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems (IROS 2003)(Cat. No. 03CH37453), vol. 3. IEEE, 2003, pp. 2743–2748
2003
-
[20]
Ct-icp: Real-time elastic lidar odometry with loop closure,
P. Dellenbach, J.-E. Deschaud, B. Jacquet, and F. Goulette, “Ct-icp: Real-time elastic lidar odometry with loop closure,” in2022 Interna- tional Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 5580–5586
2022
-
[21]
Low-drift and real-time lidar odometry and mapping,
J. Zhang and S. Singh, “Low-drift and real-time lidar odometry and mapping,”Autonomous robots, vol. 41, no. 2, pp. 401–416, 2017
2017
-
[22]
Mulls: Versatile lidar slam via multi-metric linear least square,
Y . Pan, P. Xiao, Y . He, Z. Shao, and Z. Li, “Mulls: Versatile lidar slam via multi-metric linear least square,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 11 633–11 640
2021
-
[23]
Suma++: Efficient lidar-based semantic slam,
X. Chen, A. Milioto, E. Palazzolo, P. Giguere, J. Behley, and C. Stach- niss, “Suma++: Efficient lidar-based semantic slam,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019, pp. 4530–4537
2019
-
[24]
Sage-icp: Semantic information-assisted icp,
J. Cui, J. Chen, and L. Li, “Sage-icp: Semantic information-assisted icp,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 8537–8543
2024
-
[25]
Bonxai: Fast, hierarchical, sparse voxel grid,
D. Faconti, “Bonxai: Fast, hierarchical, sparse voxel grid,” GitHub repos- itory, 2024, https://github.com/facontidavide/Bonxai [accessed: 2025-12- 03]
2024
-
[26]
Octomap: An efficient probabilistic 3d mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, “Octomap: An efficient probabilistic 3d mapping framework based on octrees,”Autonomous robots, vol. 34, no. 3, pp. 189–206, 2013
2013
-
[27]
Vdb: High-resolution sparse volumes with dynamic topol- ogy,
K. Museth, “Vdb: High-resolution sparse volumes with dynamic topol- ogy,”ACM transactions on graphics (TOG), vol. 32, no. 3, pp. 1–22, 2013
2013
-
[28]
Bayesian spatial kernel smoothing for scalable dense semantic map- ping,
L. Gan, R. Zhang, J. W. Grizzle, R. M. Eustice, and M. Ghaffari, “Bayesian spatial kernel smoothing for scalable dense semantic map- ping,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 790–797, 2020
2020
-
[29]
Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers,
M. Weinmann, B. Jutzi, S. Hinz, and C. Mallet, “Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers,”ISPRS Journal of Photogrammetry and Remote Sensing, vol. 105, pp. 286–304, 2015
2015
-
[30]
Vision meets robotics: The kitti dataset,
A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The kitti dataset,”The international journal of robotics research, vol. 32, no. 11, pp. 1231–1237, 2013
2013
-
[31]
Semantickitti: A dataset for semantic scene understanding of lidar sequences,
J. Behley, M. Garbade, A. Milioto, J. Quenzel, S. Behnke, C. Stachniss, and J. Gall, “Semantickitti: A dataset for semantic scene understanding of lidar sequences,” inProceedings of the IEEE/CVF international conference on computer vision, 2019, pp. 9297–9307
2019
-
[32]
Mulran: Multimodal range dataset for urban place recognition,
G. Kim, Y . S. Park, Y . Cho, J. Jeong, and A. Kim, “Mulran: Multimodal range dataset for urban place recognition,” in2020 IEEE international conference on robotics and automation (ICRA). IEEE, 2020, pp. 6246– 6253
2020
-
[33]
The newer college dataset: Handheld lidar, inertial and vision with ground truth,
M. Ramezani, Y . Wang, M. Camurri, D. Wisth, M. Mattamala, and M. Fallon, “The newer college dataset: Handheld lidar, inertial and vision with ground truth,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 4353–4360
2020
-
[34]
Ground-challenge: A multi-sensor slam dataset focusing on corner cases for ground robots,
J. Yin, H. Yin, C. Liang, H. Jiang, and Z. Zhang, “Ground-challenge: A multi-sensor slam dataset focusing on corner cases for ground robots,” in2023 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2023, pp. 1–5
2023
-
[35]
Subt-mrs dataset: Pushing slam towards all-weather environments,
S. Zhao, Y . Gao, T. Wu, D. Singh, R. Jiang, H. Sun, M. Sarawata, Y . Qiu, W. Whittaker, I. Higginset al., “Subt-mrs dataset: Pushing slam towards all-weather environments,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 22 647–22 657
2024
-
[36]
evo: Python package for the evaluation of odometry and slam,
M. Grupp, “evo: Python package for the evaluation of odometry and slam,” GitHub repository, 2017, https://github.com/MichaelGrupp/evo [accessed: 2025-12-03]
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.