Waypoints Matter: A Systematic Study for Sampling-Based Trajectory Planning
Pith reviewed 2026-06-28 00:42 UTC · model grok-4.3
The pith
Nominal inter-waypoint spacing drives planner reliability more than the choice of placement strategy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
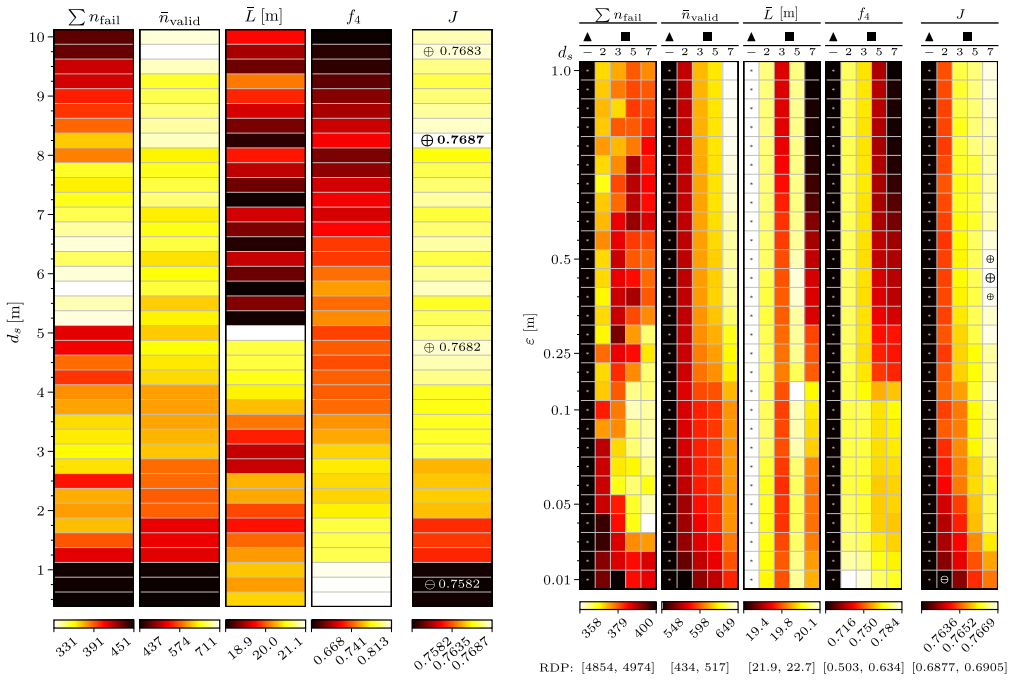
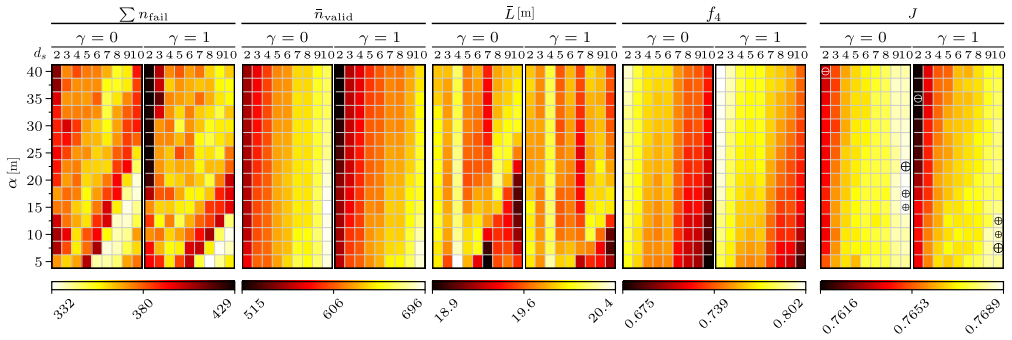
The nominal inter-waypoint spacing ds is the primary performance driver, with large differences in planner reliability attributed to placement alone. Uniform sampling at a well-tuned spacing matches or surpasses both RDP* and the centered curvature variant. The curvature variant offers a small but consistent advantage on geometrically complex roads under reliability-first and balanced weightings, while RDP* never outperforms uniform sampling.
What carries the argument
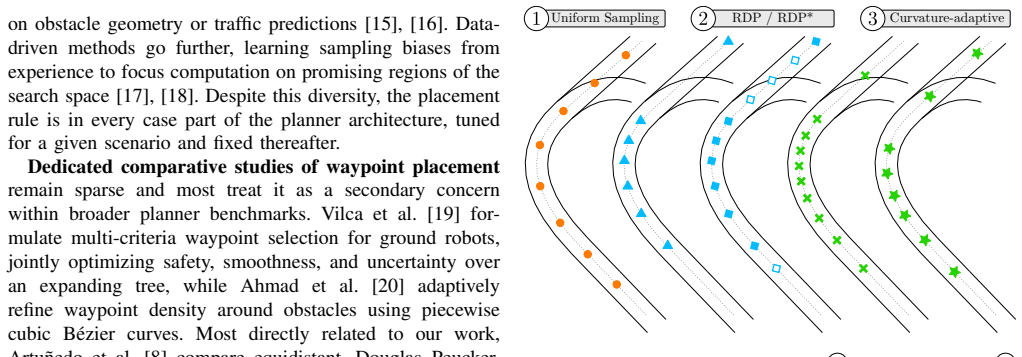
Waypoint placement strategies (uniform spacing, RDP*, curvature-conditioned allocation) evaluated for their effect on the existence and quality of feasible trajectories when linked to the road centerline.
If this is right
- Nominal spacing ds should be treated as the dominant tuning parameter.
- Geometry-aware strategies like the curvature variant are reserved for curvature-rich corridors where feasibility limits performance.
- RDP* provides no advantage over uniform sampling under the tested conditions.
- The curvature variant yields small but consistent gains only under reliability-first weightings on complex roads.
Where Pith is reading between the lines
- If the trajectory primitive or candidate budget were allowed to vary, the relative ranking of placement strategies could shift.
- Simpler uniform sampling with tuned ds might allow planners to reduce computational overhead from more elaborate placement logic.
- The isolation of placement effects suggests that similar systematic sweeps could identify dominant parameters in other planner modules.
- Extending the evaluation to dynamic obstacles or real-vehicle execution would test whether the spacing dominance holds outside the fixed-component simulation setup.
Load-bearing premise
Holding the trajectory primitive and candidate budget fixed successfully isolates waypoint placement effects without hidden interactions that would change the ranking of strategies when other planner components vary.
What would settle it
Repeating the study while varying the trajectory primitive or candidate budget and checking whether the performance ranking among uniform, RDP*, and curvature strategies reverses.
Figures

read the original abstract
Real-time autonomous driving commonly relies on sampling-based trajectory planners that link candidate trajectories to target waypoints along the road centerline. The placement of these waypoints directly impacts both the existence and quality of feasible trajectories. Yet, its effect on planner performance remains largely unexplored. In this paper, we treat waypoint placement as a first-class design variable. We hold the trajectory primitive and candidate budget fixed, and systematically sweep three placement strategies (uniform spacing, an augmented Ramer-Douglas-Peucker variant (RDP*), and a novel curvature-conditioned allocation) across 449 configurations and five CommonRoad maps of increasing geometric complexity. Our results show that the nominal inter-waypoint spacing $d_s$ is the primary performance driver, with large differences in planner reliability attributed to placement alone. Uniform sampling at a well-tuned spacing matches or surpasses both RDP* and the centered curvature variant. The curvature variant offers a small but consistent advantage on geometrically complex roads under reliability-first and balanced weightings, while RDP* never outperforms uniform sampling. These findings suggest that $d_s$ should be treated as the dominant tuning parameter, with geometry-aware strategies reserved for curvature-rich corridors where feasibility is the limiting factor.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that in sampling-based trajectory planning for autonomous driving, the nominal inter-waypoint spacing ds is the primary performance driver. By holding the trajectory primitive and candidate budget fixed, a systematic sweep of three placement strategies (uniform, RDP*, curvature-conditioned) over 449 configurations on five CommonRoad maps shows that tuned uniform sampling matches or surpasses the others, with the curvature variant providing only small advantages on complex roads and RDP* never outperforming uniform.
Significance. If the empirical findings hold under the stated constraints, the work offers actionable guidance for simplifying planner tuning by prioritizing ds over geometry-aware strategies except in curvature-rich cases. The scale of the controlled sweep (449 configs, multiple maps) provides a useful empirical baseline for the community.
major comments (2)
- [Abstract] Abstract: the claim of 'large differences in planner reliability attributed to placement alone' and that uniform 'matches or surpasses' the alternatives lacks any mention of error bars, exact quantitative metrics (e.g., success rates, reliability percentages), or statistical tests, rendering the magnitude and robustness of the reported differences unverifiable from the stated results.
- [Abstract and study design] Abstract and study design: the conclusion that ds 'should be treated as the dominant tuning parameter' with geometry-aware strategies 'reserved for curvature-rich corridors' rests on the assumption that holding the trajectory primitive and candidate budget fixed successfully isolates placement effects. No experiments, sensitivity analysis, or bounding arguments address potential interactions that could alter strategy rankings when those components vary, which directly limits the generality of the dominance claim.
minor comments (1)
- [Abstract] Abstract: the acronym 'RDP*' is used without an inline definition or reference to its augmentation of the standard Ramer-Douglas-Peucker algorithm.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below with point-by-point responses, indicating where revisions will be made to improve clarity and verifiability.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of 'large differences in planner reliability attributed to placement alone' and that uniform 'matches or surpasses' the alternatives lacks any mention of error bars, exact quantitative metrics (e.g., success rates, reliability percentages), or statistical tests, rendering the magnitude and robustness of the reported differences unverifiable from the stated results.
Authors: We agree that the abstract, as a high-level summary, would benefit from including specific quantitative metrics to support the claims. The full manuscript reports detailed success rates, reliability percentages, and performance comparisons across all 449 configurations in Sections 4 and 5, with figures illustrating variations by map and strategy. We will revise the abstract to incorporate key quantitative examples (e.g., reliability differences under tuned ds) drawn from the results, while the body provides the full data and any applicable statistical context. revision: yes
-
Referee: [Abstract and study design] Abstract and study design: the conclusion that ds 'should be treated as the dominant tuning parameter' with geometry-aware strategies 'reserved for curvature-rich corridors' rests on the assumption that holding the trajectory primitive and candidate budget fixed successfully isolates placement effects. No experiments, sensitivity analysis, or bounding arguments address potential interactions that could alter strategy rankings when those components vary, which directly limits the generality of the dominance claim.
Authors: Section 3 of the manuscript explicitly describes the controlled experimental design that holds the trajectory primitive and candidate budget fixed in order to isolate waypoint placement effects. This scoping is intentional and stated upfront, allowing attribution of observed performance differences (including ds dominance) directly to placement under these conditions. We acknowledge that untested interactions with varying primitives or budgets could affect rankings in other regimes, and the paper does not claim universality beyond the fixed setup. We will add explicit language in the discussion section to restate these boundaries and note the absence of sensitivity analysis as a limitation. revision: partial
Circularity Check
No circularity: empirical study on external benchmarks
full rationale
The paper conducts controlled empirical sweeps of waypoint placement strategies (uniform, RDP*, curvature-conditioned) while holding trajectory primitive and candidate budget fixed, evaluating on CommonRoad maps. All claims derive from direct performance measurements (reliability, quality) across 449 configurations; no equations, fitted parameters renamed as predictions, self-citations, or ansatzes reduce any result to its inputs by construction. The design is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The five CommonRoad maps of increasing geometric complexity provide a representative sample sufficient to generalize claims about performance drivers across road types.
Reference graph
Works this paper leans on
-
[1]
Optimal trajectory generation for dynamic street scenarios in a fren ´et frame,
M. Werling, J. Ziegler, S. Kammel, and S. Thrun, “Optimal trajectory generation for dynamic street scenarios in a fren ´et frame,” in2010 IEEE International Conference on Robotics and Automation, 2010, pp. 987–993
2010
-
[2]
Focused trajectory planning for autonomous on-road driving,
T. Gu, J. Snider, J. M. Dolan, and J.-W. Lee, “Focused trajectory planning for autonomous on-road driving,” in2013 IEEE Intelligent Vehicles Symposium (IV). IEEE, Jun. 2013, pp. 547–552
2013
-
[3]
A survey of motion planning and control techniques for self-driving urban vehicles,
B. Paden, M. ˇC´ap, S. Z. Yong, D. Yershov, and E. Frazzoli, “A survey of motion planning and control techniques for self-driving urban vehicles,”IEEE Transactions on Intelligent Vehicles, vol. 1, no. 1, pp. 33–55, 2016
2016
-
[4]
MPTree: A sampling- based vehicle motion planner for real-time obstacle avoidance,
M. Piazza, M. Piccinini, S. Taddei, and F. Biral, “MPTree: A sampling- based vehicle motion planner for real-time obstacle avoidance,”IFAC- PapersOnLine, vol. 58, no. 10, pp. 146–153, 2024
2024
-
[5]
An ad-hoc sampling-based planner for on-road automated driving,
C. Lienke, M. Keller, K.-H. Glander, and T. Bertram, “An ad-hoc sampling-based planner for on-road automated driving,” in2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, pp. 2371–2376
2018
-
[6]
Sampling-based optimal trajectory gen- eration for autonomous vehicles using reachable sets,
G. W ¨ursching and M. Althoff, “Sampling-based optimal trajectory gen- eration for autonomous vehicles using reachable sets,” in2021 IEEE International Intelligent Transportation Systems Conference (ITSC), 2021, pp. 828–835
2021
-
[7]
Path sampler – Autoware Universe Plan- ning,
Autoware Foundation, “Path sampler – Autoware Universe Plan- ning,” https://github.com/autowarefoundation/autoware universe/tree/ main/planning/sampling based planner/autoware path sampler, 2024, accessed: Feb. 12, 2026
2024
-
[8]
A primitive comparison for traffic-free path planning,
A. Artu ˜nedo, J. Godoy, and J. Villagra, “A primitive comparison for traffic-free path planning,”IEEE Access, vol. 6, pp. 28 801–28 817, 2018
2018
-
[9]
Machine learning based motion planning approach for intelligent vehicles,
A. Artunedo, G. Corrales, J. Villagra, and J. Godoy, “Machine learning based motion planning approach for intelligent vehicles,” in2020 IEEE Intelligent Vehicles Symposium (IV). IEEE, Oct. 2020, pp. 963–970
2020
-
[10]
Real-time motion planning approach for automated driving in urban environments,
A. Artu ˜nedo, J. Villagra, and J. Godoy, “Real-time motion planning approach for automated driving in urban environments,”IEEE Access, vol. 7, pp. 180 039–180 053, 2019
2019
-
[11]
Commonroad: Composable benchmarks for motion planning on roads,
M. Althoff, M. Koschi, and S. Manzinger, “Commonroad: Composable benchmarks for motion planning on roads,” in2017 IEEE Intelligent Vehicles Symposium (IV), 2017, pp. 719–726
2017
-
[12]
A sampling-based local trajectory planner for autonomous driving along a reference path,
X. Li, Z. Sun, A. Kurt, and Q. Zhu, “A sampling-based local trajectory planner for autonomous driving along a reference path,” in2014 IEEE Intelligent Vehicles Symposium Proceedings, 2014, pp. 376–381
2014
-
[13]
Maneuver planner for automated vehicles on urban scenarios,
J. F. Medina-Lee, V . Jim ´enez, J. Godoy, and J. Villagra, “Maneuver planner for automated vehicles on urban scenarios,” in2022 IEEE International Conference on Vehicular Electronics and Safety (ICVES), 2022, pp. 1–7
2022
-
[14]
Efficient local trajectory generation for self-driving cars: Combining waypoints, spline curves, and predictive control,
W. A. Farag, “Efficient local trajectory generation for self-driving cars: Combining waypoints, spline curves, and predictive control,”Journal of Electrical Systems and Information Technology, vol. 12, no. 1, p. 78, Sep. 2025
2025
-
[15]
Sampling-based trajectory planning and control for a collision avoidance system,
A. Homann, C. Lienke, M. Keller, M. Buss, M. Mohamed, and T. Bertram, “Sampling-based trajectory planning and control for a collision avoidance system,” in2019 IEEE Intelligent Transportation Systems Conference (ITSC), 2019, pp. 2956–2962
2019
-
[16]
Sampling- based motion planning with online racing line generation for au- tonomous driving on three-dimensional race tracks,
L. ¨Ogretmen, M. Rowold, A. Langmann, and B. Lohmann, “Sampling- based motion planning with online racing line generation for au- tonomous driving on three-dimensional race tracks,” in2024 IEEE Intelligent Vehicles Symposium (IV), 2024, pp. 811–818
2024
-
[17]
A machine learning based biased-sampling approach for planning safe trajectories in complex, dynamic traffic-scenarios,
A. Chaulwar, M. Botsch, and W. Utschick, “A machine learning based biased-sampling approach for planning safe trajectories in complex, dynamic traffic-scenarios,” in2017 IEEE Intelligent Vehicles Sympo- sium (IV), 2017, pp. 297–303
2017
-
[18]
Informed sampling-based trajectory planner for automated driving in dynamic urban environments,
R. Smit, C. van der Ploeg, A. Teerhuis, and E. Silvas, “Informed sampling-based trajectory planner for automated driving in dynamic urban environments,” in2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2022, pp. 1690–1697
2022
-
[19]
J. Vilca, L. Adouane, and Y . Mezouar, “Optimal multi-criteria waypoint selection for autonomous vehicle navigation in structured environment,”Journal of Intelligent & Robotic Systems, vol. 82, no. 2, pp. 301–324, May 2016. [Online]. Available: https: //doi.org/10.1007/s10846-015-0223-1
-
[20]
Enhancing the safety and smoothness of path planning through an integration of dijkstra’s algorithm and piecewise cubic bezier optimization,
J. Ahmad and M. Nadhir Ab Wahab, “Enhancing the safety and smoothness of path planning through an integration of dijkstra’s algorithm and piecewise cubic bezier optimization,”Expert Systems with Applications, vol. 289, p. 128315, 2025. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0957417425019347
2025
-
[21]
A generalized waypoint loss for end-to-end autonomous driving,
M. Stelzer, T. Bartels, J. Bickerdt, V . P. Schomerus, J. Piewek, T. Bagdonat, and T. Fingscheidt, “A generalized waypoint loss for end-to-end autonomous driving,” in2025 IEEE Intelligent Vehicles Symposium (IV), 2025, pp. 90–96
2025
-
[22]
Artemis: Autoregressive end-to-end trajectory planning with mixture of experts for autonomous driving,
R. Feng, N. Xi, D. Chu, R. Wang, Z. Deng, A. Wang, L. Lu, J. Wang, and Y . Huang, “Artemis: Autoregressive end-to-end trajectory planning with mixture of experts for autonomous driving,”IEEE Robotics and Automation Letters, vol. 11, no. 1, pp. 226–233, 2026
2026
-
[23]
Cooperative merging control based on reinforcement learning with dynamic waypoint,
X. Yang, H. Liu, M. Xu, and J. Wan, “Cooperative merging control based on reinforcement learning with dynamic waypoint,”IEEE Ac- cess, vol. 12, pp. 81 581–81 592, 2024
2024
-
[24]
Algorithms for the reduction of the number of points required to represent a digitized line or its caricature,
D. H. Douglas and T. K. Peucker, “Algorithms for the reduction of the number of points required to represent a digitized line or its caricature,” Cartographica: The International Journal for Geographic Information and Geovisualization, vol. 10, no. 2, pp. 112–122, 1973
1973
-
[25]
Lanelet2: A high-definition map framework for the future of automated driving,
F. Poggenhans, J.-H. Pauls, J. Janosovits, S. Orf, M. Naumann, F. Kuhnt, and M. Mayr, “Lanelet2: A high-definition map framework for the future of automated driving,” inProc. IEEE Intell. Trans. Syst. Conf., Hawaii, USA, November 2018. [Online]. Available: http:// www.mrt.kit.edu/z/publ/download/2018/Poggenhans2018Lanelet2.pdf
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.