Cooperative-ORCA*: Real-Time Proactive Deadlock Avoidance for Continuous-Space Multi-Agent Navigation
Pith reviewed 2026-06-26 08:57 UTC · model grok-4.3
The pith
C-ORCA* incorporates full spatial trajectories to prevent deadlocks proactively in continuous-space multi-agent navigation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
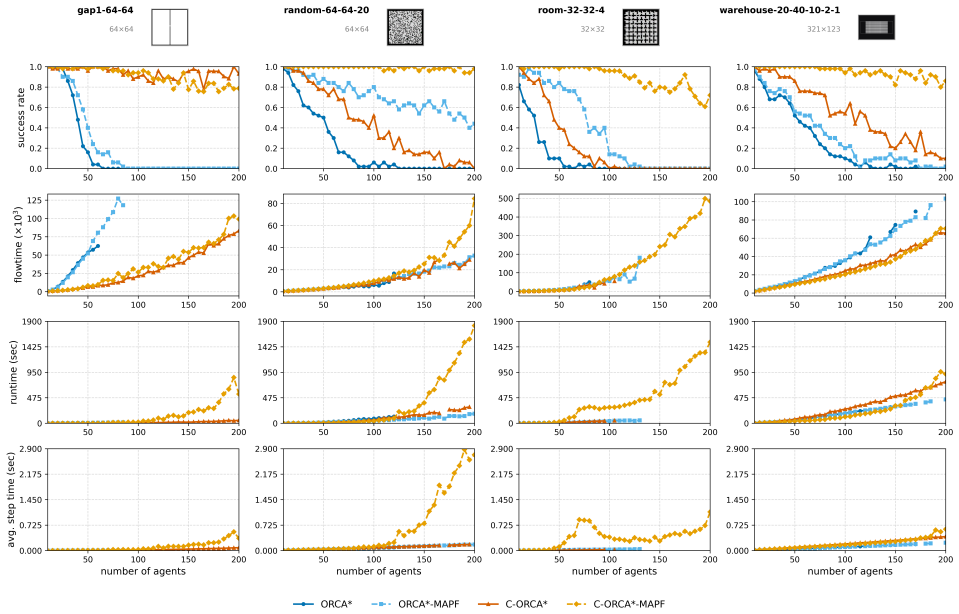
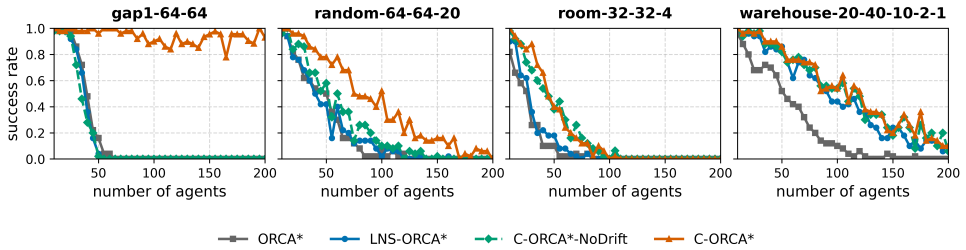
C-ORCA* and C-ORCA*-MAPF are continuous-space MAPF algorithms that incorporate agents' entire spatial trajectory and their spatial dependencies to proactively prevent deadlocks from occurring, thus avoiding the high flowtime overhead associated with post hoc corrections in ORCA*-MAPF. The C-ORCA* family of algorithms significantly outperform previous state-of-the-art in terms of solve rate, runtime, and flowtime.
What carries the argument
The mechanism of incorporating each agent's full spatial trajectory and inter-agent spatial dependencies during real-time velocity assignment to block deadlock formation in advance.
If this is right
- Real-time velocity selection can now avoid the flowtime penalty of post-detection recovery.
- Continuous-space navigation scales to larger agent teams without exponential growth in fallback interventions.
- Solve-rate gains appear across both static and dynamic goal settings where prior ORCA variants plateau.
- Runtime remains compatible with onboard control loops because trajectory information is folded into the existing velocity computation.
Where Pith is reading between the lines
- The same trajectory-sharing step could be reused in hybrid planners that switch between discrete MAPF and continuous control.
- Energy use in physical robot fleets may drop because fewer corrective detours are needed once deadlocks are blocked early.
- The approach invites testing on non-holonomic vehicles where velocity space is no longer a simple disk.
- Warehouse throughput metrics could be re-evaluated under the new flowtime numbers to quantify operational gains.
Load-bearing premise
That agents can compute and share complete future spatial trajectories and their mutual dependencies fast enough to remain real-time.
What would settle it
A test suite of continuous-space instances in which agents must recompute trajectories under sudden goal changes or sensor noise; if solve rate or flowtime no longer improves over ORCA*-MAPF, the proactive claim fails.
Figures
read the original abstract
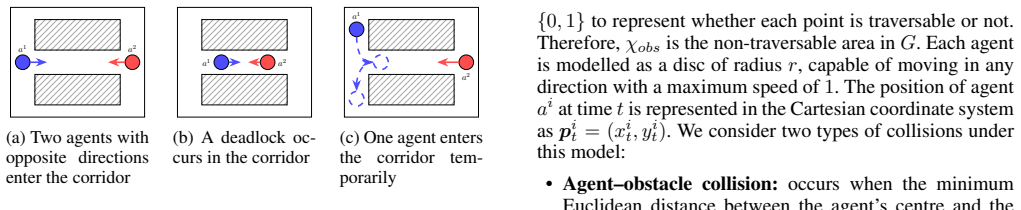
Multi-Agent Path Finding (MAPF) is a problem that requires computing collision-free paths for a set of agents from their start locations to designated goal locations. The problem has broad applications in domains where teams of robots must operate in a coordinated manner. ORCA* is a real time MAPF solver that assigns for each timestep a velocity for each agent. Due to its real time nature, it is myopic to future deadlocks that result from current decisions. ORCA*-MAPF attempts to remedy this limitation by introducing fallback mechanisms when deadlocks are detected. However, post hoc interventions often introduce significant flowtime overhead. In this paper, we introduce C-ORCA* and C-ORCA*-MAPF, continuous space MAPF algorithms that incorporate agents' entire spatial trajectory and their spatial dependencies to proactively prevent deadlocks from occurring, thus avoiding the high flowtime overhead associated with post hoc corrections in ORCA*-MAPF. The C-ORCA* family of algorithms significantly outperform previous state-of-the-art in terms of solve rate, runtime, and flowtime.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces C-ORCA* and C-ORCA*-MAPF as continuous-space extensions of ORCA* for multi-agent path finding. These algorithms incorporate agents' entire spatial trajectories and spatial dependencies at each timestep to proactively avoid deadlocks, avoiding the flowtime overhead of the post-hoc fallback mechanisms in ORCA*-MAPF. The central claim is that the C-ORCA* family significantly outperforms prior state-of-the-art methods in solve rate, runtime, and flowtime.
Significance. If the performance claims and real-time feasibility hold, the work would meaningfully advance real-time cooperative navigation by shifting from reactive to proactive deadlock handling in continuous space, potentially reducing overhead in multi-robot systems. The explicit use of full trajectories to preempt issues is a direct response to a documented limitation of myopic ORCA* solvers.
major comments (2)
- [Abstract] Abstract: the assertion that the C-ORCA* family 'significantly outperform previous state-of-the-art in terms of solve rate, runtime, and flowtime' supplies no experimental data, tables, figures, error bars, or statistical details, so the central performance claims cannot be evaluated from the manuscript text.
- [Abstract] Abstract (description of ORCA* limitation and C-ORCA* approach): the claim that agents' entire spatial trajectories and spatial dependencies can be incorporated in real time to proactively prevent deadlocks lacks any asymptotic analysis, per-component timing tables, or demonstration that dependency extraction fits inside the original ORCA* per-timestep budget; without this, the asserted runtime and flowtime advantages over ORCA*-MAPF's post-hoc interventions cannot be substantiated.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive feedback. Below we respond point-by-point to the major comments.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that the C-ORCA* family 'significantly outperform previous state-of-the-art in terms of solve rate, runtime, and flowtime' supplies no experimental data, tables, figures, error bars, or statistical details, so the central performance claims cannot be evaluated from the manuscript text.
Authors: The abstract summarizes the key results; the supporting experimental data, tables, figures (with error bars), and statistical comparisons appear in Sections 5–6 of the full manuscript. The claims are therefore evaluable from the complete text. We can revise the abstract to add an explicit pointer to those sections if the referee finds it helpful. revision: partial
-
Referee: [Abstract] Abstract (description of ORCA* limitation and C-ORCA* approach): the claim that agents' entire spatial trajectories and spatial dependencies can be incorporated in real time to proactively prevent deadlocks lacks any asymptotic analysis, per-component timing tables, or demonstration that dependency extraction fits inside the original ORCA* per-timestep budget; without this, the asserted runtime and flowtime advantages over ORCA*-MAPF's post-hoc interventions cannot be substantiated.
Authors: Empirical runtime results in the experimental section already show that C-ORCA* and C-ORCA*-MAPF remain real-time while improving solve rate and flowtime. We will add per-component timing tables and a short asymptotic note on the dependency-extraction step in the revision to make the real-time argument fully explicit. revision: yes
Circularity Check
No circularity; new algorithms presented as direct extensions without self-referential derivations.
full rationale
The abstract positions C-ORCA* and C-ORCA*-MAPF as extensions of prior ORCA* and ORCA*-MAPF that add proactive incorporation of full spatial trajectories and dependencies. No equations, fitted parameters, or derivations are supplied in the provided text that reduce by construction to inputs, self-citations, or ansatzes. Performance claims (solve rate, runtime, flowtime) are framed as empirical outcomes rather than predictions forced by internal fits. Prior ORCA* references function as external baselines, not load-bearing uniqueness theorems imported from the same authors. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption ORCA* is myopic to future deadlocks due to its real-time per-timestep velocity assignment
Reference graph
Works this paper leans on
-
[1]
Advancing Learnable Multi-Agent Pathfinding Solvers with Active Fine-Tuning , year=
Andreychuk, Anton and Yakovlev, Konstantin and Panov, Aleksandr and Skrynnik, Alexey , booktitle=. Advancing Learnable Multi-Agent Pathfinding Solvers with Active Fine-Tuning , year=
-
[2]
2025 , eprint=
RUMOR: Reinforcement learning for Understanding a Model of the Real World for Navigation in Dynamic Environments , author=. 2025 , eprint=
2025
-
[3]
Advancing MAPF towards the Real World: A Scalable Multi-Agent Realistic Testbed (SMART) , author=
-
[4]
Pivtoraiko, Mihail and Knepper, Ross A. and Kelly, Alonzo , title =. Journal of Field Robotics , volume =. doi:https://doi.org/10.1002/rob.20285 , url =. https://onlinelibrary.wiley.com/doi/pdf/10.1002/rob.20285 , abstract =
-
[5]
Drones , VOLUME =
Wang, Zihao and Zhang, Zhiwei and Dou, Wenying and Hu, Guangpeng and Zhang, Lifu and Zhang, Meng , TITLE =. Drones , VOLUME =. 2024 , NUMBER =
2024
-
[6]
Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence,
Anytime Multi-Agent Path Finding via Large Neighborhood Search , author =. Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence,. 2021 , month =. doi:10.24963/ijcai.2021/568 , url =
-
[7]
Proceedings of the International Symposium on Combinatorial Search , author=
Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks , volume=. Proceedings of the International Symposium on Combinatorial Search , author=. 2021 , month=. doi:10.1609/socs.v10i1.18510 , abstractNote=
-
[8]
A Comparison of High-Level Approaches for Speeding Up Pathfinding , volume=. Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment , author=. 2010 , month=. doi:10.1609/aiide.v6i1.12400 , abstractNote=
-
[9]
Proceedings of the AAAI Conference on Artificial Intelligence , author=
Anytime Nonparametric A* , volume=. Proceedings of the AAAI Conference on Artificial Intelligence , author=. 2011 , month=. doi:10.1609/aaai.v25i1.7819 , abstractNote=
-
[10]
2025 , eprint=
db-LaCAM: Fast and Scalable Multi-Robot Kinodynamic Motion Planning with Discontinuity-Bounded Search and Lightweight MAPF , author=. 2025 , eprint=
2025
-
[11]
db-CBS: Discontinuity-Bounded Conflict-Based Search for Multi-Robot Kinodynamic Motion Planning , year=
Moldagalieva, Akmaral and Ortiz-Haro, Joaquim and Toussaint, Marc and Hönig, Wolfgang , booktitle=. db-CBS: Discontinuity-Bounded Conflict-Based Search for Multi-Robot Kinodynamic Motion Planning , year=
-
[12]
Artificial intelligence , volume=
Conflict-based search for optimal multi-agent pathfinding , author=. Artificial intelligence , volume=. 2015 , publisher=
2015
-
[13]
Proceedings of the AAAI Conference on Artificial Intelligence , author=
LaCAM: Search-Based Algorithm for Quick Multi-Agent Pathfinding , volume=. Proceedings of the AAAI Conference on Artificial Intelligence , author=. 2023 , month=. doi:10.1609/aaai.v37i10.26377 , abstractNote=
-
[14]
and Koenig, Sven , year =
Li, Jiaoyang and Tinka, Andrew and Kiesel, Scott and Durham, Joseph and Kumar, T. and Koenig, Sven , year =. Lifelong Multi-Agent Path Finding in Large-Scale Warehouses , volume =. Proceedings of the AAAI Conference on Artificial Intelligence , doi =
-
[15]
A Review of Multi-Agent Path Finding Algorithms , year=
Wu, Mengdie and Yan, Wenyao and Hasan, Haslin and Jamaluddin, Robiatul A’Dawiah , booktitle=. A Review of Multi-Agent Path Finding Algorithms , year=
-
[16]
Challenges in Applying Multi-Agent Path Finding Solutions to Real-World Applications , year=
Lee, Jinwon and Chung, Woojin , booktitle=. Challenges in Applying Multi-Agent Path Finding Solutions to Real-World Applications , year=
-
[17]
The increasing cost tree search for optimal multi-agent pathfinding , journal =
Guni Sharon and Roni Stern and Meir Goldenberg and Ariel Felner , keywords =. The increasing cost tree search for optimal multi-agent pathfinding , journal =. 2013 , issn =. doi:https://doi.org/10.1016/j.artint.2012.11.006 , url =
-
[18]
Proceedings of the International Symposium on Combinatorial Search , author=
Efficient Multi Agent Path Finding with Turn Actions , volume=. Proceedings of the International Symposium on Combinatorial Search , author=. 2023 , month=. doi:10.1609/socs.v16i1.27290 , abstractNote=
-
[19]
Janning, Kai and Housin, Abdalsalam and Schulte, Christopher and Erkens, Frederik and Frenken, Luca and Herbst, Laura and Nießing, Bastian and Schmitt, Robert H. , TITLE=. Frontiers in Control Engineering , VOLUME=. 2025 , URL=. doi:10.3389/fcteg.2025.1645918 , ISSN=
-
[20]
Stuckey and Sven Koenig , title =
Jiaoyang Li and Zhe Chen and Daniel Harabor and Stuckey, \ Peter J.\ and Sven Koenig. MAPF-LNS2: fast repairing for Multi-Agent Path Finding via large neighborhood search. 36th AAAI Conference on Artificial Intelligence (AAAI-22). 2022. doi:10.1609/aaai.v36i9.21266
-
[21]
Proceedings of the International Conference on Automated Planning and Scheduling , author=
Multi-Agent Path Finding with Kinematic Constraints , volume=. Proceedings of the International Conference on Automated Planning and Scheduling , author=. 2016 , month=. doi:10.1609/icaps.v26i1.13796 , abstractNote=
-
[22]
Optimal and Bounded Suboptimal Any-Angle Multi-agent Pathfinding , year=
Yakovlev, Konstantin and Andreychuk, Anton and Stern, Roni , booktitle=. Optimal and Bounded Suboptimal Any-Angle Multi-agent Pathfinding , year=
-
[23]
Proceedings of the International Conference on Automated Planning and Scheduling , author=
Any-Angle Pathfinding for Multiple Agents Based on SIPP Algorithm , volume=. Proceedings of the International Conference on Automated Planning and Scheduling , author=. 2017 , month=. doi:10.1609/icaps.v27i1.13856 , abstractNote=
-
[24]
Multi-Agent Path Finding With Heterogeneous Geometric and Kinematic Constraints in Continuous Space , year=
Lin, Wenbo and Song, Wei and Zhu, Qiuguo and Zhu, Shiqiang , journal=. Multi-Agent Path Finding With Heterogeneous Geometric and Kinematic Constraints in Continuous Space , year=
-
[25]
Optimal reciprocal collision avoidance for multi-agent navigation , author=. Proc. of the IEEE International Conference on Robotics and Automation, Anchorage (AK), USA , year=
-
[26]
Reciprocal Velocity Obstacles for real-time multi-agent navigation , year=
van den Berg, Jur and Ming Lin and Manocha, Dinesh , booktitle=. Reciprocal Velocity Obstacles for real-time multi-agent navigation , year=
-
[27]
Symmetry , VOLUME =
Raibail, Mehak and Rahman, Abdul Hadi Abd and AL-Anizy, Ghassan Jasim and Nasrudin, Mohammad Faidzul and Nadzir, Mohd Shahrul Mohd and Noraini, Nor Mohd Razif and Yee, Tan Siok , TITLE =. Symmetry , VOLUME =. 2022 , NUMBER =
2022
-
[28]
2024 , MONTH = Nov, KEYWORDS =
Chauvin, T. 2024 , MONTH = Nov, KEYWORDS =
2024
-
[29]
A Combination of Theta*, ORCA and Push and Rotate for Multi-agent Navigation
Dergachev, Stepan and Yakovlev, Konstantin and Prakapovich, Ryhor. A Combination of Theta*, ORCA and Push and Rotate for Multi-agent Navigation. Interactive Collaborative Robotics. 2020
2020
-
[30]
Stepan Dergachev and Konstantin Yakovlev , year=. 2107.00246 , archivePrefix=
-
[31]
2005 , publisher=
Principles of Robot Motion: Theory, Algorithms, and Implementations , author=. 2005 , publisher=
2005
-
[32]
Bojie Shen and Zhe Chen and Muhammad Aamir Cheema and Daniel D. Harabor and Peter J. Stuckey , title =. doi:10.48550/arXiv.2305.08446 , url =
-
[33]
Proceedings of the International Symposium on Combinatorial Search , author=
Suboptimal Variants of the Conflict-Based Search Algorithm for the Multi-Agent Pathfinding Problem , volume=. Proceedings of the International Symposium on Combinatorial Search , author=. 2021 , month=. doi:10.1609/socs.v5i1.18315 , abstractNote=
-
[34]
Proceedings of the International Conference on Automated Planning and Scheduling , author=
Planning and Execution in Multi-Agent Path Finding: Models and Algorithms , volume=. Proceedings of the International Conference on Automated Planning and Scheduling , author=. 2024 , month=. doi:10.1609/icaps.v34i1.31534 , abstractNote=
-
[35]
Su, Yifan and Veerapaneni, Rishi and Li, Jiaoyang , title =. Proceedings of the Thirty-Eighth AAAI Conference on Artificial Intelligence and Thirty-Sixth Conference on Innovative Applications of Artificial Intelligence and Fourteenth Symposium on Educational Advances in Artificial Intelligence , articleno =. 2024 , isbn =. doi:10.1609/aaai.v38i16.29706 , ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.