Beyond Line of Sight: Hybrid Validation of V2X Collective Perception in Complex Scenarios
Pith reviewed 2026-07-02 11:21 UTC · model grok-4.3
The pith
Bayesian fusion integrates multi-agent sensor data into a shared probabilistic occupancy grid to extend vehicle perception beyond line of sight.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
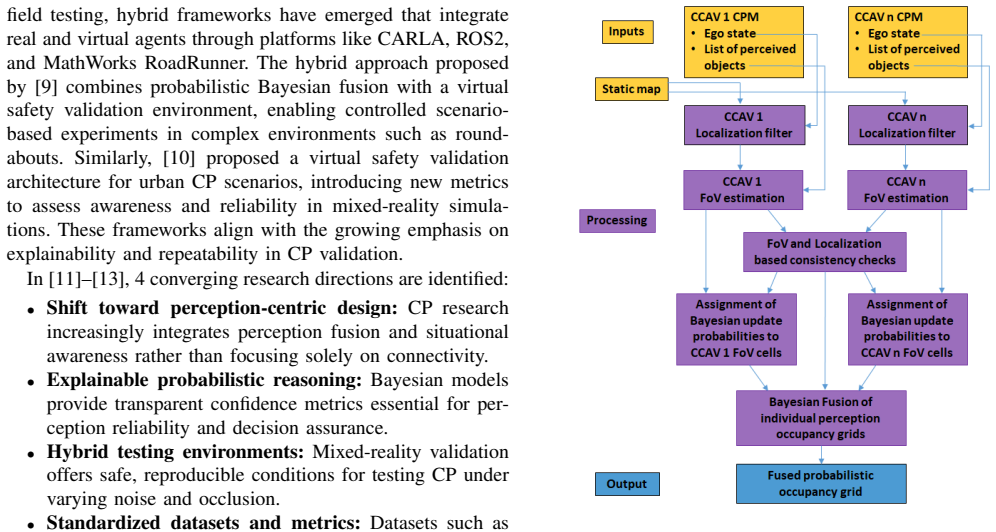
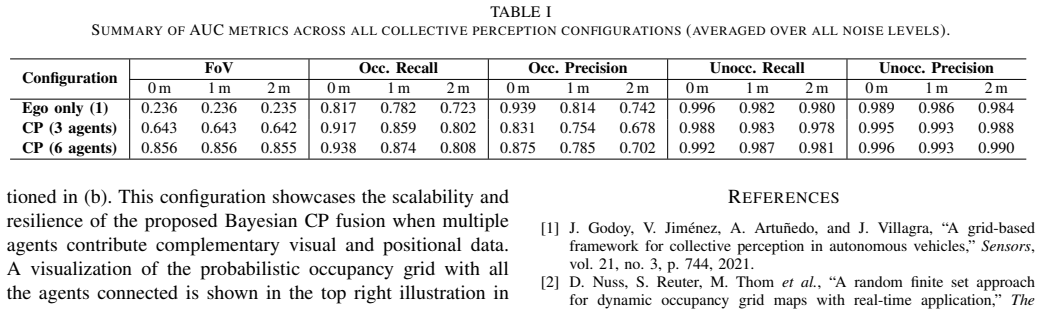
The central claim is that the Bayesian fusion algorithm extends the perceptual horizon of connected and autonomous vehicles by integrating heterogeneous sensor observations from multiple agents into a shared probabilistic occupancy grid where each cell encapsulates both occupancy likelihood and uncertainty, as shown by hybrid validation in a roundabout scenario yielding a 260 percent increase in field-of-view coverage and occupied-cell recall rising from 0.82 to 0.94 under nominal localization conditions.
What carries the argument
Bayesian fusion algorithm populating a shared probabilistic occupancy grid with occupancy likelihood and uncertainty per cell
If this is right
- Field-of-view coverage increases by 260 percent in the tested roundabout scenario.
- Occupied-cell recall improves from 0.82 with ego-only to 0.94 with six-agent collective perception.
- The system provides explainable and trustworthy situational awareness beyond the ego vehicle's field of view.
- The hybrid validation supports reproducible evaluation for safe deployment of cooperative autonomous vehicles.
Where Pith is reading between the lines
- This grid-based sharing could allow vehicles to coordinate maneuvers around occlusions without direct visibility.
- The gains may depend on communication reliability not fully tested here.
- Extending to dynamic agent numbers or different environments would test generalizability.
- Integration with existing mapping systems could enhance the uncertainty handling.
Load-bearing premise
The hybrid testing framework that combines virtual environments with vehicle-in-the-loop experimentation accurately captures real-world sensor noise, localization errors, and traffic dynamics.
What would settle it
A real-world test in similar roundabout conditions yielding occupied-cell recall below 0.85 or FOV coverage gain less than 100 percent would falsify the performance claims.
Figures

read the original abstract
This paper introduces a probabilistic framework and hybrid validation methodology for V2X-enabled Collective Perception (CP) in complex traffic scenarios. The proposed Bayesian fusion algorithm extends the perceptual horizon of connected and autonomous vehicles by integrating heterogeneous sensor observations from multiple agents into a shared probabilistic occupancy grid. Each cell of this grid encapsulates both occupancy likelihood and uncertainty, enabling explainable and trustworthy situational awareness beyond the ego vehicle's field of view. To bridge the gap between simulation and real-world evaluation, a hybrid testing framework is developed, combining CARLA-based virtual environments with vehicle-in-the-loop experimentation. Experimental results in a roundabout scenario demonstrate a 260 percent increase in field-of-view coverage and a rise in occupied-cell recall from 0.82 (ego-only) to 0.94 (six-agent CP) under nominal localization conditions. Overall, the proposed approach provides a reproducible and interpretable foundation for validating CP systems, supporting the safe and certifiable deployment of cooperative autonomous vehicles.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a Bayesian fusion algorithm for V2X collective perception that integrates heterogeneous sensor observations from multiple agents into a shared probabilistic occupancy grid, each cell encoding occupancy likelihood and uncertainty. It develops a hybrid validation methodology combining CARLA-based simulation with vehicle-in-the-loop experimentation. In a roundabout scenario, it reports a 260% increase in field-of-view coverage and an increase in occupied-cell recall from 0.82 (ego-only) to 0.94 (six-agent CP) under nominal localization conditions, positioning the work as a reproducible foundation for trustworthy CP systems.
Significance. If the hybrid framework's modeling of sensor noise and localization errors holds, the probabilistic occupancy grid provides an explainable representation that could aid certification of cooperative autonomous vehicles. The hybrid validation approach is a constructive attempt to narrow the sim-to-real gap. The reported numerical gains in a complex scenario indicate potential for extending perceptual range, but the significance hinges on whether the quantitative results generalize beyond the specific simulation parameters.
major comments (2)
- [Hybrid Validation Methodology] Hybrid Validation Methodology section: The assumption that CARLA virtual environments plus the vehicle-in-the-loop interface accurately reproduce real-world sensor noise, localization errors, and V2X packet-loss statistics is load-bearing for the claim that the recall rises from 0.82 to 0.94 and the 260% FOV increase support safe deployment. No independent real-world ground-truth comparison or sensitivity analysis to these modeling choices is referenced.
- [Experimental Results] Experimental Results section: The headline metrics (260% FOV increase, recall 0.82 to 0.94) are presented without error bars, ablation on localization assumptions, number of runs, or description of how the 260% FOV figure was computed. This prevents verification that the gains are independent of simulation parameters chosen to produce the outcome.
minor comments (2)
- [Methodology] The abstract states the fusion algorithm but supplies no derivation or pseudocode; adding a high-level equation or algorithm box in the methodology would improve clarity without altering the central claim.
- Notation for occupancy likelihood and uncertainty per grid cell is introduced but not consistently used in the results discussion; a table summarizing the grid parameters would aid readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [Hybrid Validation Methodology] Hybrid Validation Methodology section: The assumption that CARLA virtual environments plus the vehicle-in-the-loop interface accurately reproduce real-world sensor noise, localization errors, and V2X packet-loss statistics is load-bearing for the claim that the recall rises from 0.82 to 0.94 and the 260% FOV increase support safe deployment. No independent real-world ground-truth comparison or sensitivity analysis to these modeling choices is referenced.
Authors: The hybrid framework intentionally combines CARLA simulation with vehicle-in-the-loop to capture real sensor noise and dynamics from physical hardware. We agree that sensitivity analysis strengthens the claims and will add it in revision, varying localization error (0–0.5 m) and packet-loss rates while reporting effects on recall and FOV. A complete independent real-world multi-agent ground-truth dataset is outside the current scope but noted as future work; the present results are explicitly conditioned on nominal localization as stated in the manuscript. revision: partial
-
Referee: [Experimental Results] Experimental Results section: The headline metrics (260% FOV increase, recall 0.82 to 0.94) are presented without error bars, ablation on localization assumptions, number of runs, or description of how the 260% FOV figure was computed. This prevents verification that the gains are independent of simulation parameters chosen to produce the outcome.
Authors: We will expand the Experimental Results section to report: error bars computed over 10 independent runs per configuration; an ablation table on localization error; the exact number of runs; and the FOV computation (percentage increase in covered area given by the union of all agents’ sensor footprints versus the ego-only footprint, measured on the scenario map). These additions will enable independent verification. revision: yes
Circularity Check
No circularity in derivation; results are experimental outcomes from hybrid simulation.
full rationale
The paper describes a Bayesian fusion algorithm for collective perception and reports empirical metrics (260% FOV increase, recall 0.82 to 0.94) obtained from CARLA + vehicle-in-the-loop experiments. No equations, parameter-fitting steps, or derivation chain are presented in the abstract that reduce a claimed prediction to its own inputs by construction. No self-citations, uniqueness theorems, or ansatzes are invoked. The load-bearing element is the fidelity of the hybrid testbed to real sensor noise, which is an external modeling assumption rather than a self-referential reduction. This is a standard empirical validation paper whose central claims remain independent of the listed circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A grid-based framework for collective perception in autonomous vehicles,
J. Godoy, V . Jim ´enez, A. Artu ˜nedo, and J. Villagra, “A grid-based framework for collective perception in autonomous vehicles,”Sensors, vol. 21, no. 3, p. 744, 2021
2021
-
[2]
A random finite set approach for dynamic occupancy grid maps with real-time application,
D. Nuss, S. Reuter, M. Thomet al., “A random finite set approach for dynamic occupancy grid maps with real-time application,”The International Journal of Robotics Research, vol. 37, no. 8, pp. 841– 866, 2018
2018
-
[3]
Bayesian occupancy filtering for multi-target tracking: an automotive application,
C. Cou ´e, C. Pradalier, and C. Laugier, “Bayesian occupancy filtering for multi-target tracking: an automotive application,”The International Journal of Robotics Research, vol. 25, no. 1, pp. 19–30, 2006
2006
-
[4]
Hybrid sampling bayesian occupancy filter,
A. N `egre, L. Rummelhard, and C. Laugier, “Hybrid sampling bayesian occupancy filter,” inIEEE Intelligent Vehicles Symposium, 2014, pp. 1307–1312
2014
-
[5]
A novel probabilistic v2x data fusion framework for cooperative perception,
M. Shan, K. Narula, S. Worrall, and Y . F. Wong, “A novel probabilistic v2x data fusion framework for cooperative perception,”IEEE Transac- tions on Intelligent Transportation Systems, 2022
2022
-
[6]
Vehicle-to-everything cooperative perception for autonomous driving,
T. Huang, J. Liu, X. Zhou, and D. C. Nguyen, “Vehicle-to-everything cooperative perception for autonomous driving,”IEEE Transactions on Intelligent Vehicles, 2025
2025
-
[7]
V2x-sim: Multi-agent collaborative per- ception dataset and benchmark for autonomous driving,
Y . Li, D. Ma, Z. Anet al., “V2x-sim: Multi-agent collaborative per- ception dataset and benchmark for autonomous driving,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 914–10 921, 2022
2022
-
[8]
arXiv preprint arXiv:2308.16714 (2023)
S. Liu, C. Gao, Y . Chen, X. Peng, X. Kong, and K. Wang, “Towards vehicle-to-everything autonomous driving: A survey on collaborative perception,”arXiv preprint arXiv:2308.16714, 2023
-
[9]
Towards collective perception hybrid testing in a roundabout scenario with avs,
M. Antonopoulos, A. Bolovinou, and B. Roungas, “Towards collective perception hybrid testing in a roundabout scenario with avs,” inLecture Notes in Computer Science, 2024
2024
-
[10]
Collective perception virtual safety validation in urban environments: Scenarios, tools, met- rics,
A. Bolovinou, I. Panagiotopoulos, and A. Ballis, “Collective perception virtual safety validation in urban environments: Scenarios, tools, met- rics,” inLecture Notes in Computer Science, 2024
2024
-
[11]
Cooperative perception for automated driving: A survey of algorithms, applications, and future directions,
C. Wei, G. Wu, and M. J. Barth, “Cooperative perception for automated driving: A survey of algorithms, applications, and future directions,” IEEE Transactions on Intelligent Transportation Systems, 2025
2025
-
[12]
Exploring shared perception and control in cooperative vehicle-intersection systems: A review,
E. Y . Bejarbaneh, H. Du, and F. Naghdy, “Exploring shared perception and control in cooperative vehicle-intersection systems: A review,”IEEE Access, 2024
2024
-
[13]
V2X cooperative perception for autonomous driving: Recent advances and challenges,
T. Huang, J. Liu, X. Zhou, and D. C. Nguyen, “V2x cooperative perception for autonomous driving: Recent advances and challenges,” arXiv preprint arXiv:2310.03525, 2023
-
[14]
A data trust framework for vanets enabling false data detection and secure vehicle tracking,
M. Sun, M. Li, and R. Gerdes, “A data trust framework for vanets enabling false data detection and secure vehicle tracking,” in2017 IEEE Conference on Communications and Network Security (CNS). IEEE, 2017, pp. 1–9
2017
-
[15]
Trust management framework for misbehavior detection in collective perception services,
J. Zhang, I. B. Jemaa, and F. Nashashibi, “Trust management framework for misbehavior detection in collective perception services,” in2022 17th International Conference on Control, Automation, Robotics and Vision (ICARCV). IEEE, 2022, pp. 596–603
2022
-
[16]
Sur- vey on misbehavior detection in cooperative intelligent transportation systems,
R. W. Van Der Heijden, S. Dietzel, T. Leinm ¨uller, and F. Kargl, “Sur- vey on misbehavior detection in cooperative intelligent transportation systems,”IEEE Communications Surveys & Tutorials, vol. 21, no. 1, pp. 779–811, 2018
2018
-
[17]
Integrating plausibility checks and machine learning for misbehavior detection in vanet,
S. So, P. Sharma, and J. Petit, “Integrating plausibility checks and machine learning for misbehavior detection in vanet,” in2018 17th IEEE International Conference on Machine Learning and Applications (ICMLA). IEEE, 2018, pp. 564–571
2018
-
[18]
Simulation framework for misbehavior detection in vehicular net- works,
J. Kamel, M. R. Ansari, J. Petit, A. Kaiser, I. B. Jemaa, and P. Urien, “Simulation framework for misbehavior detection in vehicular net- works,”IEEE transactions on vehicular technology, vol. 69, no. 6, pp. 6631–6643, 2020
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.