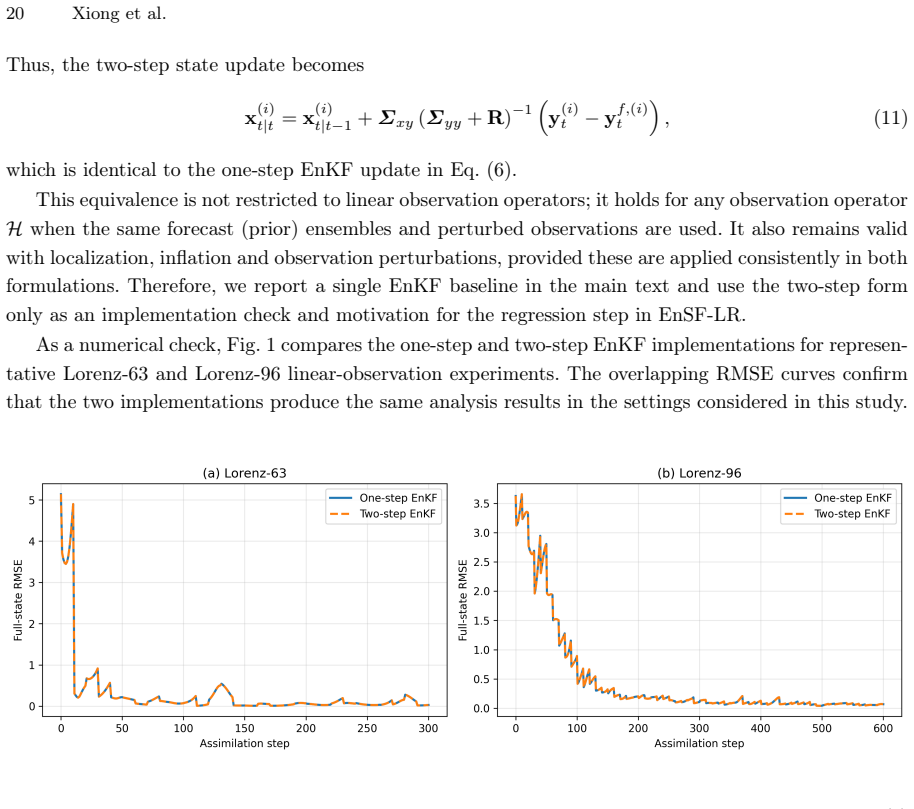
A Two-Step Ensemble Score Filter for Data Assimilation in Partially Observed Systems
Pith reviewed 2026-06-29 01:23 UTC · model grok-4.3
The pith
EnSF-LR updates observed state components with a nonlinear score-based filter then maps corrections linearly to unobserved components via ensemble covariance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
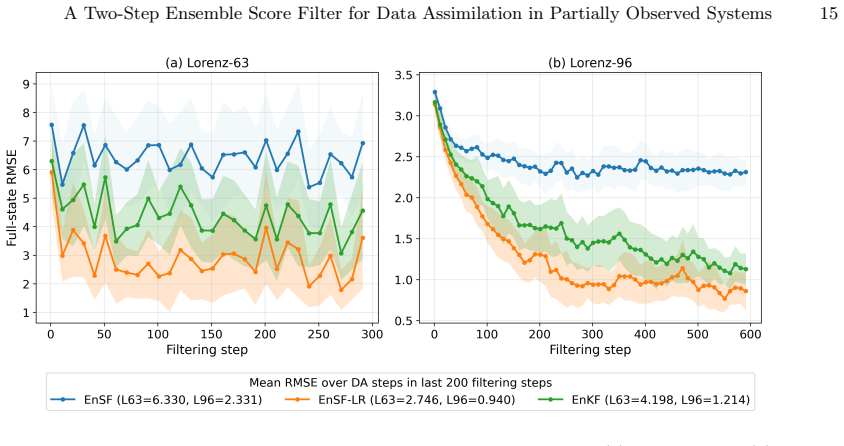
EnSF-LR performs a nonlinear score-based analysis update on the observed state components at each analysis time and then computes the resulting analysis increments and maps them to the unobserved components through the ensemble-based prior covariance matrix, achieving lower full-state root-mean-square error than both the original EnSF and the stochastic EnKF in nonlinear-observation experiments on the Lorenz-63 and Lorenz-96 systems.
What carries the argument
The EnSF-LR two-step procedure, in which an Ensemble Score Filter supplies the nonlinear update to observed components and the ensemble prior covariance matrix supplies the linear regression that extends the increments to unobserved components.
If this is right
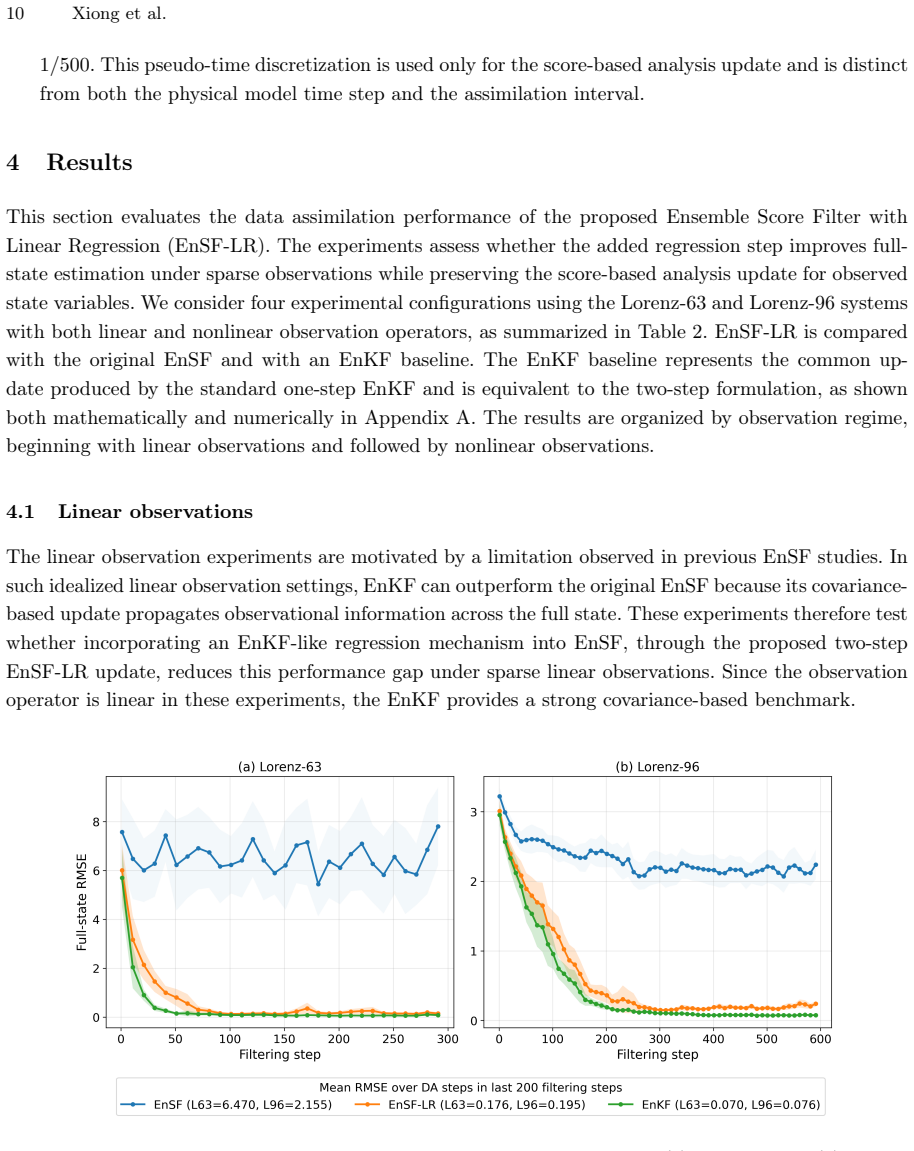
- In linear-observation experiments, EnSF-LR produces accuracy comparable to the EnKF baseline while substantially reducing error relative to the original EnSF.
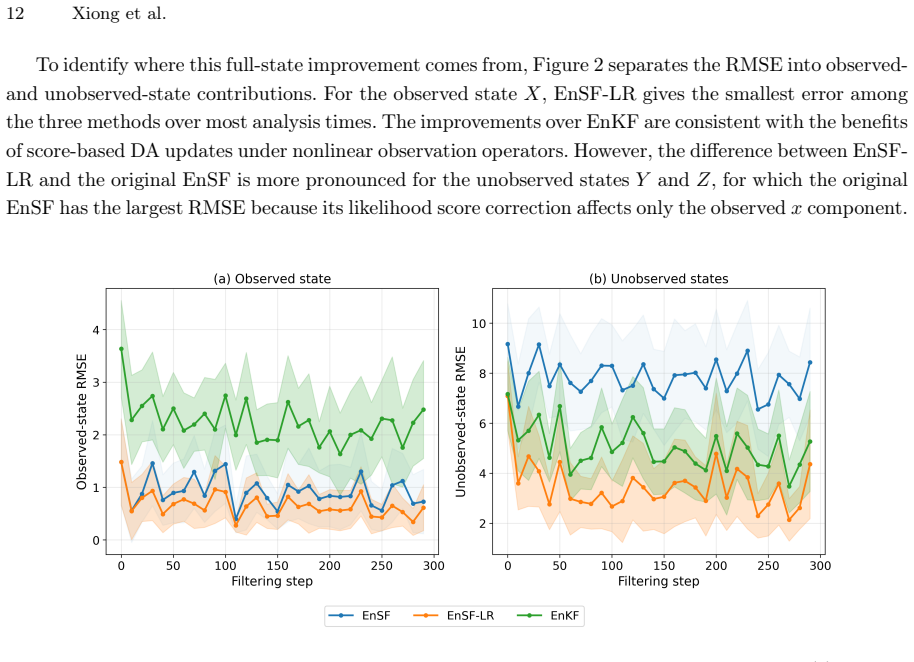
- In nonlinear-observation experiments, EnSF-LR achieves lower full-state root-mean-square error than both the original EnSF and the EnKF reference.
- Hybridizing score-based and EnKF analysis schemes provides an effective strategy for assimilating sparse and nonlinear observations.
Where Pith is reading between the lines
- The same two-step structure could be applied to other ensemble-based score filters or to higher-dimensional models where full-state verification data remain available.
- The linear regression step might be replaced by other covariance estimators without changing the overall separation of nonlinear and linear handling.
- The approach suggests that score-based methods need not replace ensemble Kalman filters entirely but can be used selectively on the observed subspace.
Load-bearing premise
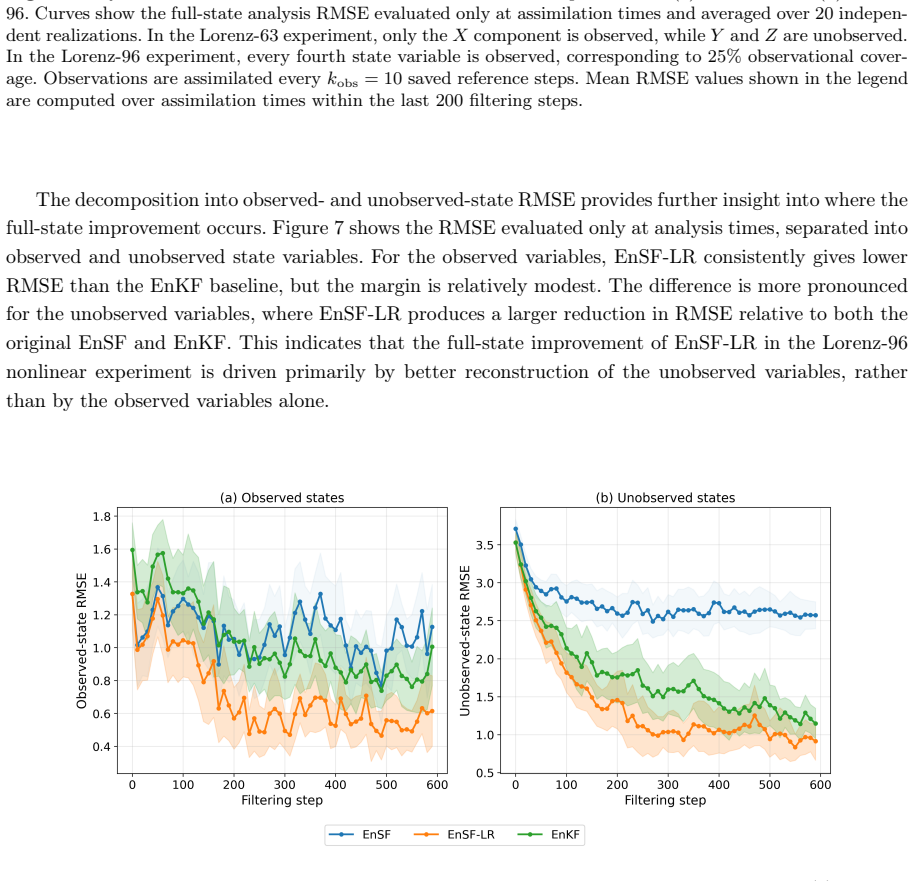
The ensemble-based prior covariance matrix supplies an accurate linear mapping from observed-state analysis increments to unobserved components even when observations are nonlinear functions of the state.
What would settle it
In the 40-dimensional Lorenz-96 system with nonlinear observations, if EnSF-LR full-state root-mean-square error is not lower than both the original EnSF and the stochastic EnKF, the performance advantage claim would be falsified.
Figures

read the original abstract
Data assimilation blends model forecasts with observations to estimate the evolving state of complex dynamical systems, but sparse observing networks remain challenging because unobserved state variables are not directly constrained by observations. In this work, we introduce the Ensemble Score Filter with Linear Regression (EnSF-LR), a two-step filtering method for partially observed nonlinear systems. At each analysis time, EnSF-LR first applies the Ensemble Score Filter (EnSF) to update the observed state components using a nonlinear score-based analysis update. It then computes the resulting observed-state analysis increments and maps these corrections to the unobserved components through the ensemble-based prior covariance matrix. The latter amounts to the same linear regression mechanism used by Ensemble Kalman Filters (EnKFs). We evaluate EnSF-LR using the Lorenz-63 and 40-dimensional Lorenz-96 systems with sparse linear and nonlinear observations. The method is compared with the original EnSF and with the classical stochastic EnKF. In the linear-observation experiments, EnSF-LR produces accuracy comparable to the EnKF baseline while substantially reducing error relative to the original EnSF. In the nonlinear-observation experiments, EnSF-LR achieves lower full-state root-mean-square error than both the original EnSF and the EnKF reference. These results suggest that hybridizing score-based and EnKF analysis schemes provides an effective strategy for assimilating sparse and nonlinear observations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the Ensemble Score Filter with Linear Regression (EnSF-LR), a two-step method for data assimilation in partially observed nonlinear systems. The first step applies the nonlinear Ensemble Score Filter update to observed state components; the second step maps the resulting analysis increments to unobserved components via linear regression using the ensemble-based prior covariance matrix. Experiments on the Lorenz-63 and 40-dimensional Lorenz-96 systems with sparse linear and nonlinear observations compare EnSF-LR against the original EnSF and a stochastic EnKF, reporting that EnSF-LR yields comparable accuracy to EnKF (and better than EnSF) under linear observations and lower full-state RMSE than both under nonlinear observations.
Significance. If the reported RMSE improvements are statistically robust, the hybrid strategy offers a practical way to combine the nonlinear analysis capability of score-based filters on observed variables with the efficient linear regression of EnKFs for unobserved variables. This addresses a common challenge in sparse observing networks without requiring a fully nonlinear update on the entire state. The method description is internally consistent and the experiments directly test the performance claim on standard low-dimensional test systems.
major comments (2)
- [Abstract and experimental results section] The abstract and experimental results report comparative full-state RMSE values for EnSF-LR versus EnSF and EnKF in the nonlinear-observation cases but supply no error bars, no ensemble-size or localization details, and no statistical significance tests. These omissions make it impossible to determine whether the claimed lower RMSE constitutes a reliable improvement rather than sampling variability.
- [Method description (two-step procedure)] The two-step procedure relies on the ensemble prior covariance supplying an accurate linear mapping from observed-state analysis increments to unobserved components even when observations are nonlinear functions of the state. No diagnostic or sensitivity analysis of this assumption is provided beyond the final RMSE numbers, yet it is load-bearing for the claim that the hybrid method outperforms both pure EnSF and EnKF under nonlinear observations.
minor comments (1)
- [Experimental setup] The manuscript does not state the ensemble size, inflation factor, or localization radius used in any of the reported experiments, which are standard details needed for reproducibility of EnKF-style methods.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive comments, which help improve the clarity and robustness of our presentation. We address each major comment below and will revise the manuscript to incorporate the suggested enhancements.
read point-by-point responses
-
Referee: [Abstract and experimental results section] The abstract and experimental results report comparative full-state RMSE values for EnSF-LR versus EnSF and EnKF in the nonlinear-observation cases but supply no error bars, no ensemble-size or localization details, and no statistical significance tests. These omissions make it impossible to determine whether the claimed lower RMSE constitutes a reliable improvement rather than sampling variability.
Authors: We agree that the current presentation would benefit from additional statistical details to allow readers to assess the robustness of the reported improvements. In the revised manuscript we will add: (i) error bars computed from multiple independent assimilation cycles or Monte Carlo repetitions, (ii) explicit statements of the ensemble sizes employed (100 members for Lorenz-63 and 200 members for Lorenz-96), (iii) a description of any localization radius or tapering applied to the ensemble covariance, and (iv) results of paired statistical tests (e.g., Welch’s t-test) on the RMSE differences to establish significance. These additions will be placed in both the experimental-results section and the abstract where appropriate. revision: yes
-
Referee: [Method description (two-step procedure)] The two-step procedure relies on the ensemble prior covariance supplying an accurate linear mapping from observed-state analysis increments to unobserved components even when observations are nonlinear functions of the state. No diagnostic or sensitivity analysis of this assumption is provided beyond the final RMSE numbers, yet it is load-bearing for the claim that the hybrid method outperforms both pure EnSF and EnKF under nonlinear observations.
Authors: The linear-regression step inherits the same cross-covariance mechanism that has proven effective in EnKF literature for partially observed nonlinear systems; the ensemble prior covariance is expected to capture the dominant linear relationships between observed and unobserved variables even when the observation operator itself is nonlinear. Nevertheless, we recognize that an explicit diagnostic would strengthen the justification. In the revision we will add a short sensitivity subsection that (a) reports the ensemble-size dependence of the cross-covariance accuracy and (b) examines the correlation patterns between observed and unobserved components for the nonlinear-observation experiments. These diagnostics will be presented alongside the existing RMSE comparisons. revision: partial
Circularity Check
No significant circularity; empirical results stand independently
full rationale
The paper defines EnSF-LR as a two-step procedure (nonlinear EnSF update on observed components followed by prior-covariance linear regression to unobserved components) and reports lower full-state RMSE than EnSF and EnKF on Lorenz-63/96 under nonlinear observations. No derivation chain reduces a claimed prediction to a fitted parameter or self-citation by construction; the central claims are direct numerical comparisons on chosen test systems. Minor self-citation to the original EnSF exists but is not load-bearing for the reported accuracy gains.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
2023 , url=
Rozet, F and Louppe, G , title=. 2023 , url=
2023
-
[2]
Generative Data Assimilation of Sparse Weather Station Observations at Kilometer Scales , JOURNAL =
Manshausen, P and Cohen, Y and Pathak, J and Pritchard, M and Gard, P and Mardani, M and Kashinath, K and Byrne, S and Brenowitz, N , YEAR =. Generative Data Assimilation of Sparse Weather Station Observations at Kilometer Scales , JOURNAL =
-
[3]
Martin, S. A. and Manucharyan, G. E. and Klein, P. , title =. Journal of Advances in Modeling Earth Systems , year =
-
[4]
Atmospheric Modeling, Data Assimilation and Predictability , PUBLISHER =
Kalnay, Eugenia , YEAR =. Atmospheric Modeling, Data Assimilation and Predictability , PUBLISHER =
-
[5]
Data Assimilation: The Ensemble Kalman Filter , EDITION =
Evensen, Geir , YEAR =. Data Assimilation: The Ensemble Kalman Filter , EDITION =
-
[6]
2016 , TITLE =
Asch, Mark and Bocquet, Marc and Nodet, Ma. 2016 , TITLE =
2016
-
[7]
Probabilistic Forecasting and Bayesian Data Assimilation , PUBLISHER =
Reich, Sebastian and Cotter, Colin , YEAR =. Probabilistic Forecasting and Bayesian Data Assimilation , PUBLISHER =
-
[8]
Sequential Data Assimilation with a Nonlinear Quasi-Geostrophic Model Using
Evensen, Geir , YEAR =. Sequential Data Assimilation with a Nonlinear Quasi-Geostrophic Model Using. Journal of Geophysical Research: Oceans , VOLUME =
-
[9]
Analysis Scheme in the Ensemble
Burgers, Gerrit and van Leeuwen, Peter Jan and Evensen, Geir , YEAR =. Analysis Scheme in the Ensemble. Monthly Weather Review , VOLUME =
-
[10]
and Hamill, Thomas M
Whitaker, Jeffrey S. and Hamill, Thomas M. , YEAR =. Ensemble Data Assimilation without Perturbed Observations , JOURNAL =
-
[11]
, YEAR =
Anderson, Jeffrey L. , YEAR =. A Local Least Squares Framework for Ensemble Filtering , JOURNAL =
-
[13]
and Salmond, David J
Gordon, Neil J. and Salmond, David J. and Smith, Adrian F. M. , YEAR =. Novel Approach to Nonlinear/. IEE Proceedings F: Radar and Signal Processing , VOLUME =
-
[14]
A Survey of Convergence Results on Particle Filtering Methods for Practitioners , JOURNAL =
Crisan, Dan and Doucet, Arnaud , YEAR =. A Survey of Convergence Results on Particle Filtering Methods for Practitioners , JOURNAL =
-
[15]
Particle Filtering in Geophysical Systems , JOURNAL =
van Leeuwen, Peter Jan , YEAR =. Particle Filtering in Geophysical Systems , JOURNAL =
-
[16]
Quarterly Journal of the Royal Meteorological Society , VOLUME =
van Leeuwen, Peter Jan and K. Quarterly Journal of the Royal Meteorological Society , VOLUME =. 2019 , TITLE =
2019
-
[17]
Sequential
Pulido, Manuel and van Leeuwen, Peter Jan , YEAR =. Sequential. Journal of Computational Physics , VOLUME =
-
[18]
A Particle Flow Filter for High-Dimensional System Applications , JOURNAL =
Hu, Chih-Chi and van Leeuwen, Peter Jan , YEAR =. A Particle Flow Filter for High-Dimensional System Applications , JOURNAL =
-
[19]
, YEAR =
Fletcher, Steven J. , YEAR =. Mixed. Tellus A: Dynamic Meteorology and Oceanography , VOLUME =
-
[20]
and Chen, Xuguang , YEAR =
Chan, Man-Yau and Anderson, Jeffrey L. and Chen, Xuguang , YEAR =. An Efficient. Monthly Weather Review , VOLUME =
-
[21]
and Zupanski, Milija and Goodliff, Michael R
Fletcher, Steven J. and Zupanski, Milija and Goodliff, Michael R. and Kliewer, Anton J. and Jones, Andrew S. and Forsythe, John M. and Wu, Ting-Chi and Hossen, Md. Jakir and Van Loon, Senne , YEAR =. Lognormal and Mixed. Monthly Weather Review , VOLUME =
-
[22]
, YEAR =
Anderson, Jeffrey L. , YEAR =. A Quantile-Conserving Ensemble Filter Framework. Part I: Updating an Observed Variable , JOURNAL =
-
[23]
, YEAR =
Anderson, Jeffrey L. , YEAR =. A Quantile-Conserving Ensemble Filter Framework. Part II: Regression of Observation Increments in a Probit and Probability Integral Transformed Space , JOURNAL =
-
[24]
Data Assimilation as a Learning Tool to Infer Ordinary Differential Equation Representations of Dynamical Models , JOURNAL =
Bocquet, Marc and Brajard, Julien and Carrassi, Alberto and Bertino, Laurent , YEAR =. Data Assimilation as a Learning Tool to Infer Ordinary Differential Equation Representations of Dynamical Models , JOURNAL =
-
[25]
Bayesian Inference of Chaotic Dynamics by Merging Data Assimilation, Machine Learning and Expectation-Maximization , JOURNAL =
Bocquet, Marc and Brajard, Julien and Carrassi, Alberto and Bertino, Laurent , YEAR =. Bayesian Inference of Chaotic Dynamics by Merging Data Assimilation, Machine Learning and Expectation-Maximization , JOURNAL =
-
[26]
Combining Data Assimilation and Machine Learning to Emulate a Dynamical Model from Sparse and Noisy Observations: A Case Study with the
Brajard, Julien and Carrassi, Alberto and Bocquet, Marc and Bertino, Laurent , YEAR =. Combining Data Assimilation and Machine Learning to Emulate a Dynamical Model from Sparse and Noisy Observations: A Case Study with the. Journal of Computational Science , VOLUME =
-
[27]
Machine Learning for Model Error Inference and Correction , JOURNAL =
Bonavita, Massimo and Laloyaux, Patrick , YEAR =. Machine Learning for Model Error Inference and Correction , JOURNAL =
-
[28]
Using Machine Learning to Correct Model Error in Data Assimilation and Forecast Applications , JOURNAL =
Farchi, Alban and Laloyaux, Patrick and Bonavita, Massimo and Bocquet, Marc , YEAR =. Using Machine Learning to Correct Model Error in Data Assimilation and Forecast Applications , JOURNAL =
-
[29]
Quarterly Journal of the Royal Meteorological Society , VOLUME =
Peyron, Mathis and Fillion, Anthony and G. Quarterly Journal of the Royal Meteorological Society , VOLUME =. 2021 , TITLE =
2021
-
[30]
Towards Physics-Inspired Data-Driven Weather Forecasting: Integrating Data Assimilation with a Deep Spatial-Transformer-Based
Chattopadhyay, Ashesh and Mustafa, Mustafa and Hassanzadeh, Pedram and Bach, Eviatar and Kashinath, Karthik , YEAR =. Towards Physics-Inspired Data-Driven Weather Forecasting: Integrating Data Assimilation with a Deep Spatial-Transformer-Based. Geoscientific Model Development , VOLUME =
-
[31]
, YEAR =
Meng, Zilu and Hakim, Gregory J. , YEAR =. Reconstructing the Tropical. Journal of Advances in Modeling Earth Systems , VOLUME =
-
[32]
and Kumar, Abhishek and Ermon, Stefano and Poole, Ben , YEAR =
Song, Yang and Sohl-Dickstein, Jascha and Kingma, Diederik P. and Kumar, Abhishek and Ermon, Stefano and Poole, Ben , YEAR =. Score-Based Generative Modeling through Stochastic Differential Equations , BOOKTITLE =
-
[33]
Understanding Diffusion Models: A Unified Perspective , EPRINT =
Luo, Calvin , YEAR =. Understanding Diffusion Models: A Unified Perspective , EPRINT =
-
[34]
, YEAR =
Chipilski, Hristo G. , YEAR =. Exact Nonlinear State Estimation , JOURNAL =
-
[35]
An Ensemble Score Filter for Tracking High-Dimensional Nonlinear Dynamical Systems , JOURNAL =
Bao, Feng and Zhang, Zezhong and Zhang, Guannan , YEAR =. An Ensemble Score Filter for Tracking High-Dimensional Nonlinear Dynamical Systems , JOURNAL =
-
[36]
and Liang, Siming and Zhang, Guannan and Whitaker, Jeffrey S
Bao, Feng and Chipilski, Hristo G. and Liang, Siming and Zhang, Guannan and Whitaker, Jeffrey S. , YEAR =. Nonlinear Ensemble Filtering with Diffusion Models: Application to the Surface Quasi-Geostrophic Dynamics , JOURNAL =
-
[37]
, YEAR =
Xiong, Zixiang and Liang, Siming and Bao, Feng and Zhang, Guannan and Chipilski, Hristo G. , YEAR =. Robustness of the Ensemble Score Filter to the Type of Assimilated Observation Networks , JOURNAL =
-
[38]
and Haberland, Matt and Reddy, Tyler and Cournapeau, David and Burovski, Evgeni and Peterson, Pearu and Weckesser, Warren and Bright, Jonathan and van der Walt, St
Virtanen, Pauli and Gommers, Ralf and Oliphant, Travis E. and Haberland, Matt and Reddy, Tyler and Cournapeau, David and Burovski, Evgeni and Peterson, Pearu and Weckesser, Warren and Bright, Jonathan and van der Walt, St. Nature Methods , VOLUME =. 2020 , TITLE =
2020
-
[39]
, EDITOR =
Hindmarsh, Alan C. , EDITOR =. Scientific Computing , PUBLISHER =. 1983 , TITLE =
1983
-
[40]
, YEAR =
Petzold, Linda R. , YEAR =. Automatic Selection of Methods for Solving Stiff and Nonstiff Systems of Ordinary Differential Equations , JOURNAL =
-
[41]
Journal of the Atmospheric Sciences , VOLUME =
Yang, Shu-Chih and Baker, Debra and Li, Hong and Cordes, Katy and Huff, Morgan and Nagpal, Geetika and Okereke, Ena and Villafa. Journal of the Atmospheric Sciences , VOLUME =. 2006 , TITLE =
2006
-
[42]
Tellus A , VOLUME =
Kalnay, Eugenia and Li, Hong and Miyoshi, Takemasa and Yang, Shu-Chih and Ballabrera-Poy, Joaquim , YEAR =. Tellus A , VOLUME =
-
[43]
, YEAR =
Hu, Chih-Chi and van Leeuwen, Peter Jan and Anderson, Jeffrey L. , YEAR =. An Implementation of the Particle Flow Filter in an Atmospheric Model , JOURNAL =
-
[44]
Introducing
Hu, Chih-Chi and Geer, Alan and van Leeuwen, Peter Jan , YEAR =. Introducing. Quarterly Journal of the Royal Meteorological Society , VOLUME =
-
[45]
and Amrhein, Daniel and Collins, Nancy and Grooms, Ian and Kugler, Lisa , YEAR =
El Gharamti, Mohamad and Kershaw, Hannah and Raeder, Kevin and Raczka, Brett and Johnson, Ben and Smith, Mary and Anderson, Jeffrey L. and Amrhein, Daniel and Collins, Nancy and Grooms, Ian and Kugler, Lisa , YEAR =. The Data Assimilation Research Testbed: A Robust, Scalable Software Facility with Groundbreaking Capabilities for Model-Data Integration , JOURNAL =
-
[46]
A Comparison of Nonlinear Extensions to the Ensemble
Grooms, Ian , YEAR =. A Comparison of Nonlinear Extensions to the Ensemble. Computational Geosciences , VOLUME =
-
[47]
Law, Kody J. H. and Sanz-Alonso, Daniel and Shukla, Abhishek and Stuart, Andrew M. , YEAR =. Filter Accuracy for the. Physica D: Nonlinear Phenomena , VOLUME =
-
[48]
, YEAR =
Snyder, Chris and Bengtsson, Thomas and Bickel, Peter and Anderson, Jeffrey L. , YEAR =. Obstacles to High-Dimensional Particle Filtering , JOURNAL =
-
[49]
A Score-Based Filter for Nonlinear Data Assimilation , JOURNAL =
Bao, Feng and Zhang, Zezhong and Zhang, Guannan , YEAR =. A Score-Based Filter for Nonlinear Data Assimilation , JOURNAL =
-
[50]
and van Leeuwen, Peter Jan and Zhang, Guannan , YEAR =
Liang, Siming and Tran, Hoang and Bao, Feng and Chipilski, Hristo G. and van Leeuwen, Peter Jan and Zhang, Guannan , YEAR =. Ensemble Score Filter with Image Inpainting for Data Assimilation in Tracking Surface Quasi-Geostrophic Dynamics with Partial Observations , EPRINT =
-
[51]
Ensemble Score Filter for Data Assimilation of Two-Phase Flow Models in Porous Media , JOURNAL =
Hu, Ruoyu and Poudel, Sanjeeb and Bao, Feng and Lee, Sanghyun , YEAR =. Ensemble Score Filter for Data Assimilation of Two-Phase Flow Models in Porous Media , JOURNAL =
-
[52]
Zhang, Zezhong and Bao, Feng and Zhang, Guannan , YEAR =. 2510.20159 , ARCHIVEPREFIX =
-
[53]
Ensemble Score Filtering for Real-Data Energy Consumption Forecast Correction , EPRINT =
Hu, Ruoyu and Yu, Dahai and Bao, Feng and Wang, Guang and Zhang, Guannan , YEAR =. Ensemble Score Filtering for Real-Data Energy Consumption Forecast Correction , EPRINT =
-
[54]
and Mitchell, Herschel L
Houtekamer, Peter L. and Mitchell, Herschel L. , YEAR =. Data Assimilation Using an Ensemble. Monthly Weather Review , VOLUME =
-
[55]
L., 2003: A local least squares framework for ensemble filtering
Anderson, J. L., 2003: A local least squares framework for ensemble filtering. Monthly Weather Review, 131 (4), 634--642, doi:https://doi.org/10.1175/1520-0493(2003)131<0634:ALLSFF>2.0.CO;2
-
[56]
L., 2022: A quantile-conserving ensemble filter framework
Anderson, J. L., 2022: A quantile-conserving ensemble filter framework. part i: Updating an observed variable. Monthly Weather Review, 150 (5), 1061--1074, doi:https://doi.org/10.1175/MWR-D-21-0229.1
-
[57]
L., 2023: A quantile-conserving ensemble filter framework
Anderson, J. L., 2023: A quantile-conserving ensemble filter framework. part ii: Regression of observation increments in a probit and probability integral transformed space. Monthly Weather Review, 151 (10), 2759--2777, doi:https://doi.org/10.1175/MWR-D-23-0065.1
-
[58]
Asch, M., M. Bocquet, and M. Nodet, 2016: Data Assimilation: Methods, Algorithms, and Applications. SIAM, Philadelphia, Pennsylvania, doi:https://doi.org/10.1137/1.9781611974546
-
[59]
Bao, F., H. G. Chipilski, S. Liang, G. Zhang, and J. S. Whitaker, 2025: Nonlinear ensemble filtering with diffusion models: Application to the surface quasi-geostrophic dynamics. Monthly Weather Review, 153 (7), 1155--1169, doi:https://doi.org/10.1175/MWR-D-24-0069.1
-
[60]
Bao, F., Z. Zhang, and G. Zhang, 2024 a : An ensemble score filter for tracking high-dimensional nonlinear dynamical systems. Computer Methods in Applied Mechanics and Engineering, 432, 117\,447, doi:https://doi.org/10.1016/j.cma.2024.117447
-
[61]
Bao, F., Z. Zhang, and G. Zhang, 2024 b : A score-based filter for nonlinear data assimilation. Journal of Computational Physics, 514, 113\,207, doi:https://doi.org/10.1016/j.jcp.2024.113207
-
[62]
Bocquet, M., J. Brajard, A. Carrassi, and L. Bertino, 2019: Data assimilation as a learning tool to infer ordinary differential equation representations of dynamical models. Nonlinear Processes in Geophysics, 26, 143--162, doi:https://doi.org/10.5194/npg-26-143-2019
-
[63]
Bocquet, M., J. Brajard, A. Carrassi, and L. Bertino, 2020: Bayesian inference of chaotic dynamics by merging data assimilation, machine learning and expectation-maximization. Foundations of Data Science, 2 (1), 55--80, doi:https://doi.org/10.3934/fods.2020004
-
[64]
Laloyaux, 2020: Machine learning for model error inference and correction
Bonavita, M., and P. Laloyaux, 2020: Machine learning for model error inference and correction. Journal of Advances in Modeling Earth Systems, 12 (12), e2020MS002\,232, doi:https://doi.org/10.1029/2020MS002232
-
[65]
Brajard, J., A. Carrassi, M. Bocquet, and L. Bertino, 2020: Combining data assimilation and machine learning to emulate a dynamical model from sparse and noisy observations: A case study with the Lorenz 96 model. Journal of Computational Science, 44, 101\,171, doi:https://doi.org/10.1016/j.jocs.2020.101171
-
[67]
Chan, M.-Y., J. L. Anderson, and X. Chen, 2020: An efficient Bi-Gaussian ensemble Kalman filter for satellite infrared radiance data assimilation. Monthly Weather Review, 148 (12), 5087--5104, doi:https://doi.org/10.1175/MWR-D-20-0142.1
-
[68]
Chattopadhyay, A., M. Mustafa, P. Hassanzadeh, E. Bach, and K. Kashinath, 2022: Towards physics-inspired data-driven weather forecasting: Integrating data assimilation with a deep spatial-transformer-based U-NET in a case study with ERA5 . Geoscientific Model Development, 15 (5), 2221--2237, doi:https://doi.org/10.5194/gmd-15-2221-2022
-
[69]
G., 2025: Exact nonlinear state estimation
Chipilski, H. G., 2025: Exact nonlinear state estimation. Journal of the Atmospheric Sciences, 82 (4), 809--827, doi:https://doi.org/10.1175/JAS-D-24-0171.1
-
[70]
Doucet, 2002: A survey of convergence results on particle filtering methods for practitioners
Crisan, D., and A. Doucet, 2002: A survey of convergence results on particle filtering methods for practitioners. IEEE Transactions on Signal Processing, 50 (3), 736--746, doi:https://doi.org/10.1109/78.984773
-
[71]
El Gharamti, M., and Coauthors, 2025: The data assimilation research testbed: A robust, scalable software facility with groundbreaking capabilities for model-data integration. Bulletin of the American Meteorological Society, 106 (11), E2328--E2345, doi:https://doi.org/10.1175/BAMS-D-24-0214.1
-
[72]
Evensen, G., 1994: Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. Journal of Geophysical Research: Oceans, 99 (C5), 10\,143--10\,162, doi:https://doi.org/10.1029/94JC00572
-
[73]
Springer, Berlin, Heidelberg, 2nd edition, 2009
Evensen, G., 2009: Data Assimilation: The Ensemble Kalman Filter. 2nd ed., Springer, Berlin, Germany, doi:https://doi.org/10.1007/978-3-642-03711-5
-
[74]
Farchi, A., P. Laloyaux, M. Bonavita, and M. Bocquet, 2021: Using machine learning to correct model error in data assimilation and forecast applications. Quarterly Journal of the Royal Meteorological Society, 147 (739), 3067--3084, doi:https://doi.org/10.1002/qj.4116
-
[75]
J., 2010: Mixed Gaussian -lognormal four-dimensional data assimilation
Fletcher, S. J., 2010: Mixed Gaussian -lognormal four-dimensional data assimilation. Tellus A: Dynamic Meteorology and Oceanography, 62 (3), 266--287, doi:https://doi.org/10.3402/tellusa.v62i3.15688
-
[76]
J., and Coauthors, 2023: Lognormal and mixed Gaussian --lognormal Kalman filters
Fletcher, S. J., and Coauthors, 2023: Lognormal and mixed Gaussian --lognormal Kalman filters. Monthly Weather Review, 151 (3), 761--774, doi:https://doi.org/10.1175/MWR-D-22-0072.1
-
[77]
Gordon, N. J., D. J. Salmond, and A. F. M. Smith, 1993: Novel approach to nonlinear/ Non-Gaussian bayesian state estimation. IEE Proceedings F: Radar and Signal Processing, 140 (2), 107--113, doi:https://doi.org/10.1049/ip-f-2.1993.0015
-
[78]
Computational Geosciences, 26 (3), 633--650, doi:https://doi.org/10.1007/s10596-022-10141-x
Grooms, I., 2022: A comparison of nonlinear extensions to the ensemble Kalman filter. Computational Geosciences, 26 (3), 633--650, doi:https://doi.org/10.1007/s10596-022-10141-x
-
[79]
C., 1983: ODEPACK , a systematized collection of ODE solvers
Hindmarsh, A. C., 1983: ODEPACK , a systematized collection of ODE solvers. Scientific Computing, R. S. Stepleman, M. Carver, R. Peskin, W. F. Ames, and R. Vichnevetsky, Eds., North-Holland, Amsterdam, 55--64
1983
-
[80]
Houtekamer, P. L., and H. L. Mitchell, 1998: Data assimilation using an ensemble Kalman filter technique. Monthly Weather Review, 126 (3), 796--811, doi:https://doi.org/10.1175/1520-0493(1998)126<0796:DAUAEK>2.0.CO;2
-
[81]
Hu, C.-C., A. Geer, and P. J. van Leeuwen, 2025: Introducing Non-Gaussian observation errors into incremental variational data assimilation methods. Quarterly Journal of the Royal Meteorological Society, 151, e5050, doi:https://doi.org/10.1002/qj.5050
-
[82]
Hu, C.-C., and P. J. van Leeuwen, 2021: A particle flow filter for high-dimensional system applications. Quarterly Journal of the Royal Meteorological Society, 147 (737), 2352--2374, doi:https://doi.org/10.1002/qj.4028
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.