Uncertainty Quantification via Invariant-Measure Conformal Prediction
Pith reviewed 2026-07-01 04:04 UTC · model grok-4.3
The pith
Invariant-measure conformal prediction restores finite-sample coverage guarantees for dynamical systems by calibrating on stationary distribution samples.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that calibrating conformal prediction with independent samples drawn from the invariant measure of the Markov process induced by the system dynamics restores the statistical symmetry required for valid one-step coverage guarantees, even when trajectory data is dependent; for multi-step recursion it further yields explicit bounds via Lipschitz propagation of prediction errors through the learned model.
What carries the argument
The invariant-measure conformal prediction (imCP) framework, which performs split conformal calibration on independent draws from the system's invariant measure rather than on evolving trajectories.
If this is right
- Uncertainty tubes can be computed before deployment for use in receding-horizon and self-triggered control.
- The same calibration set yields valid bounds across the entire stationary regime rather than only near the training distribution.
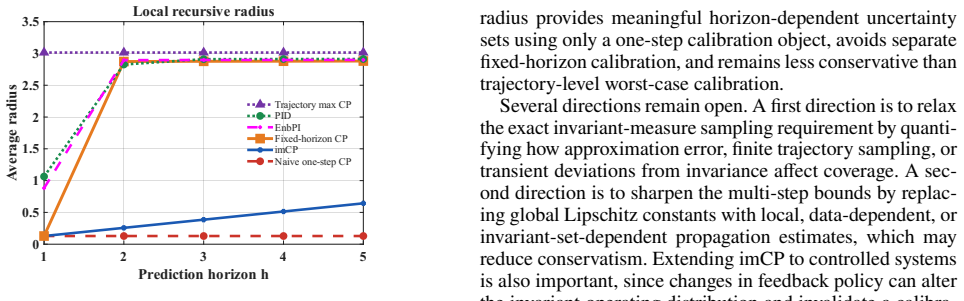
- Multi-step bounds grow explicitly with prediction horizon through the Lipschitz constant of the learned predictor.
- The approach directly supports applications such as fault detection where future residuals are unavailable at design time.
Where Pith is reading between the lines
- The same stationary-sampling idea could be tested on other non-exchangeable data streams that possess ergodic invariant measures, such as certain queueing or network processes.
- If the invariant measure is only approximately known, one could examine how approximation error in the calibration samples propagates into coverage inflation.
- Numerical experiments in the paper already contrast invariant versus non-invariant calibration; extending those to systems without a unique invariant measure would directly test the necessity of the assumption.
Load-bearing premise
The dynamics must induce a Markov process that possesses an invariant measure from which independent samples can be obtained for calibration.
What would settle it
A simulation or real deployment in which independent samples from the claimed invariant measure cannot be obtained and the resulting conformal intervals fail to achieve the nominal coverage rate on held-out stationary trajectories.
Figures
read the original abstract
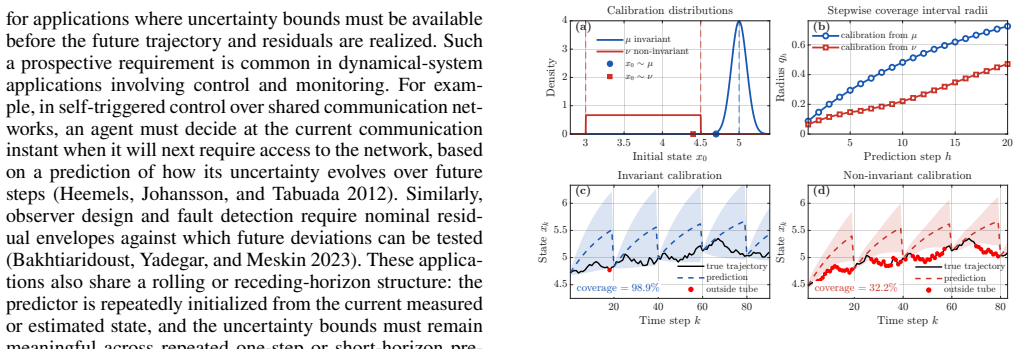
Uncertainty quantification for learned stochastic dynamical systems is essential in safety-critical tasks such as control and monitoring. Standard conformal prediction provides finite-sample coverage guarantees under exchangeability, but this assumption is typically violated in dynamical systems because trajectory data are temporally dependent, state distributions evolve, and recursive prediction errors accumulate. This paper proposes an invariant-measure conformal prediction (imCP) framework that calibrates uncertainty using independent samples from an invariant measure of the Markov process induced by the dynamics. This aligns calibration with the stationary operating regime and restores the statistical symmetry needed for rolling one-step split conformal guarantees. For recursive multi-step prediction, imCP combines conformal calibration with Lipschitz error propagation through the learned predictor to obtain explicit horizon-dependent bounds.These pre-deployment uncertainty tubes are suitable for rolling and receding-horizon applications, such as self-triggered control and fault detection, where uncertainty bounds must be computed before future residuals are observed. Numerical experiments show that imCP yields reliable bounds, while non-invariant calibration can become misaligned during deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an invariant-measure conformal prediction (imCP) framework for uncertainty quantification in learned stochastic dynamical systems. Standard conformal prediction is extended by calibrating on independent samples drawn from the invariant measure of the induced Markov process, restoring exchangeability for finite-sample marginal coverage guarantees on one-step residuals in the stationary regime. For recursive multi-step prediction, the method combines this calibration with Lipschitz-based error propagation to produce explicit horizon-dependent uncertainty tubes suitable for pre-deployment use in control and monitoring tasks. Numerical experiments are reported to demonstrate reliable bounds compared to non-invariant calibration.
Significance. If the sampling assumption can be realized without approximation error, the framework would provide a principled way to obtain distribution-free coverage guarantees for dynamical systems where temporal dependence and distribution shift normally invalidate standard conformal prediction. This is relevant for safety-critical applications such as self-triggered control and fault detection. The combination of invariant-measure calibration with Lipschitz propagation is a natural technical step, though its practical utility hinges on the realizability of the i.i.d. invariant samples.
major comments (2)
- [Abstract, §3] Abstract and §3 (imCP framework definition): The central coverage guarantee requires independent samples drawn exactly from the invariant measure of the learned Markov process. The manuscript states this assumption but provides no explicit procedure or algorithm for generating such samples from a black-box learned predictor without introducing dependence, bias, or finite-mixing artifacts. Any such artifact would invalidate the finite-sample marginal coverage claim for rolling one-step predictions.
- [§4] §4 (multi-step bounds): The Lipschitz error propagation argument assumes the learned predictor is Lipschitz with a known constant; however, the manuscript does not address how this constant is obtained or bounded when the dynamics are learned from data, which is load-bearing for the explicit horizon-dependent tubes.
minor comments (2)
- Notation for the invariant measure and the calibration set should be introduced earlier and used consistently across sections.
- The experimental section would benefit from an ablation showing coverage degradation when the calibration samples deviate from true invariance (e.g., via finite mixing).
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our imCP framework. The comments help clarify the scope of our assumptions and the practical considerations for implementation. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract, §3] Abstract and §3 (imCP framework definition): The central coverage guarantee requires independent samples drawn exactly from the invariant measure of the learned Markov process. The manuscript states this assumption but provides no explicit procedure or algorithm for generating such samples from a black-box learned predictor without introducing dependence, bias, or finite-mixing artifacts. Any such artifact would invalidate the finite-sample marginal coverage claim for rolling one-step predictions.
Authors: The imCP framework is explicitly developed under the modeling assumption that i.i.d. samples from the invariant measure are available for calibration; this restores the exchangeability needed for the finite-sample marginal coverage guarantee on one-step residuals. The manuscript does not provide a general sampling algorithm because exact sampling from the invariant measure of an arbitrary black-box learned Markov process is a separate, model-specific problem in ergodic theory. In the revision we will add a dedicated paragraph in §3 discussing practical approximations (e.g., multiple independent long trajectories with burn-in) together with the associated caveats on mixing time and dependence. revision: yes
-
Referee: [§4] §4 (multi-step bounds): The Lipschitz error propagation argument assumes the learned predictor is Lipschitz with a known constant; however, the manuscript does not address how this constant is obtained or bounded when the dynamics are learned from data, which is load-bearing for the explicit horizon-dependent tubes.
Authors: The multi-step bounds are derived under the assumption that a Lipschitz constant for the learned predictor is known. The current manuscript does not detail data-driven estimation procedures for this constant. In the revision we will expand §4 to describe how the constant can be obtained or upper-bounded in practice (e.g., via the supremum of the Jacobian norm over a validation set or via architecture-specific bounds for Lipschitz networks) and will report the values used in the numerical experiments. revision: yes
Circularity Check
No significant circularity; derivation relies on external assumption rather than self-referential reduction.
full rationale
The paper's central construction (imCP) calibrates using independent samples drawn from an invariant measure of the induced Markov process, which is posited to restore exchangeability and thereby inherit split conformal guarantees. This is an explicit modeling assumption stated in the abstract, not a quantity fitted to data and then renamed as a prediction, nor a definition that embeds the target coverage result inside the inputs. No equations, self-citations, or uniqueness theorems are shown that would force the claimed coverage by construction. The framework therefore remains self-contained against external benchmarks once the sampling assumption is granted.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The system dynamics induce a Markov process that possesses an invariant measure from which independent samples can be drawn for calibration.
Reference graph
Works this paper leans on
-
[2]
Advances in Neural Information Processing Systems , year =
Conformal PID Control for Time Series Prediction , author =. Advances in Neural Information Processing Systems , year =
-
[3]
2025 , note =
Theoretical Foundations of Conformal Prediction , author =. 2025 , note =
2025
-
[4]
International Conference on Machine Learning , pages =
Sorting Out Lipschitz Function Approximation , author =. International Conference on Machine Learning , pages =. 2019 , volume =
2019
-
[5]
Annals of Statistics , volume =
Conformal Prediction Beyond Exchangeability , author =. Annals of Statistics , volume =
-
[6]
Conformal Prediction of Reinforcement Learning Agents Short-term Operation , author =
-
[7]
International Conference on Machine Learning , pages =
Parseval Networks: Improving Robustness to Adversarial Examples , author =. International Conference on Machine Learning , pages =. 2017 , volume =
2017
-
[8]
Handbook of Dynamical Systems , volume =
Set oriented numerical methods for dynamical systems , author =. Handbook of Dynamical Systems , volume =
-
[9]
Physica D: Nonlinear Phenomena , volume =
Finite approximations of Frobenius--Perron operators: A solution of Ulam's conjecture to multi-dimensional transformations , author =. Physica D: Nonlinear Phenomena , volume =
-
[10]
Conference on Learning for Dynamics and Control , year =
Adaptive Conformal Prediction for Motion Planning among Dynamic Agents , author =. Conference on Learning for Dynamics and Control , year =
-
[11]
Advances in Neural Information Processing Systems , volume =
Efficient and Accurate Estimation of Lipschitz Constants for Deep Neural Networks , author =. Advances in Neural Information Processing Systems , volume =
-
[12]
arXiv preprint arXiv:2005.07972 , year =
Conformal Prediction: A Unified Review of Theory and New Challenges , author =. arXiv preprint arXiv:2005.07972 , year =
-
[13]
Nonlinearity , volume =
Ulam's method for random interval maps , author =. Nonlinearity , volume =
-
[14]
Advances in Neural Information Processing Systems , year =
Adaptive Conformal Inference under Distribution Shift , author =. Advances in Neural Information Processing Systems , year =
-
[15]
Journal of Machine Learning Research , volume =
Conformal Inference for Online Prediction with Arbitrary Distribution Shifts , author =. Journal of Machine Learning Research , volume =
-
[16]
Journal of Nonlinear Science , volume =
Data-driven model reduction and transfer operator approximation , author =. Journal of Nonlinear Science , volume =
-
[17]
Chaos, Fractals, and Noise: Stochastic Aspects of Dynamics , author =
-
[18]
2013 , publisher =
Chaos, fractals, and noise: stochastic aspects of dynamics , author =. 2013 , publisher =
2013
-
[19]
Journal of Approximation Theory , volume =
Finite approximation for the Frobenius--Perron operator: A solution to Ulam's conjecture , author =. Journal of Approximation Theory , volume =
-
[20]
arXiv preprint , year =
Conformal Prediction on Quantifying Uncertainty of Dynamic Systems , author =. arXiv preprint , year =
-
[21]
IEEE Robotics and Automation Letters , volume =
Safe Planning in Dynamic Environments Using Conformal Prediction , author =. IEEE Robotics and Automation Letters , volume =
-
[22]
Formal Verification and Control with Conformal Prediction , author =. arXiv preprint arXiv:2409.00536 , year =
-
[23]
Markov Chains and Stochastic Stability , author =
-
[24]
International Conference on Learning Representations , year =
Spectral Normalization for Generative Adversarial Networks , author =. International Conference on Learning Representations , year =
-
[25]
The Fokker--Planck Equation: Methods of Solution and Applications , author =
-
[26]
Advances in Neural Information Processing Systems , year =
Conformalized Quantile Regression , author =. Advances in Neural Information Processing Systems , year =
-
[27]
Journal of Machine Learning Research , volume =
A Tutorial on Conformal Prediction , author =. Journal of Machine Learning Research , volume =
-
[28]
Advances in Neural Information Processing Systems , year =
Conformal Time-Series Forecasting , author =. Advances in Neural Information Processing Systems , year =
-
[29]
Advances in Neural Information Processing Systems , volume =
Conformal Prediction under Covariate Shift , author =. Advances in Neural Information Processing Systems , volume =
-
[30]
Asian Conference on Machine Learning , pages =
Conditional validity of inductive conformal predictors , author =. Asian Conference on Machine Learning , pages =
-
[31]
International Conference on Machine Learning , year =
Conformal Prediction Interval for Dynamic Time-Series , author =. International Conference on Machine Learning , year =
-
[33]
International Conference on Machine Learning , year =
Adaptive Conformal Predictions for Time Series , author =. International Conference on Machine Learning , year =
-
[34]
IEEE Conference on Decision and Control , pages=
An introduction to event-triggered and self-triggered control , author=. IEEE Conference on Decision and Control , pages=
-
[35]
ISA transactions , volume=
Data-driven fault detection and isolation of nonlinear systems using deep learning for Koopman operator , author=. ISA transactions , volume=. 2023 , publisher=
2023
-
[36]
IEEE International Symposium on Circuits and Systems , pages=
Long-short term memory neural network stability and stabilization using linear matrix inequalities , author=. IEEE International Symposium on Circuits and Systems , pages=
-
[37]
IEEE International Conference on Robotics and Automation , pages=
Gosafe: Globally optimal safe robot learning , author=. IEEE International Conference on Robotics and Automation , pages=
-
[38]
IEEE Access , volume=
Model-free geometric fault detection and isolation for nonlinear systems using koopman operator , author=. IEEE Access , volume=. 2022 , publisher=
2022
-
[39]
IEEE Internet of Things Journal , volume=
Resource-aware IoT control: Saving communication through predictive triggering , author=. IEEE Internet of Things Journal , volume=. 2019 , publisher=
2019
-
[40]
IEEE Transactions on Control Systems Technology , volume=
Stable bilateral teleoperation with bounded control , author=. IEEE Transactions on Control Systems Technology , volume=. 2018 , publisher=
2018
-
[41]
Journal of Building Engineering , volume=
A data-driven approach for fault diagnosis in multi-zone HVAC systems: Deep neural bilinear Koopman parity , author=. Journal of Building Engineering , volume=. 2023 , publisher=
2023
-
[42]
IEEE Transactions on Circuits and Systems II: Express Briefs , volume=
Steady-state analysis of switching converters via frequency-domain circuit equivalents , author=. IEEE Transactions on Circuits and Systems II: Express Briefs , volume=. 2016 , publisher=
2016
-
[43]
Advances in Neural Information Processing Systems , volume=
Training neural operators to preserve invariant measures of chaotic attractors , author=. Advances in Neural Information Processing Systems , volume=
-
[44]
AAAI Conference on Artificial Intelligence , volume=
Conformal prediction regions for time series using linear complementarity programming , author=. AAAI Conference on Artificial Intelligence , volume=
-
[45]
2012 , publisher=
Laws of chaos: invariant measures and dynamical systems in one dimension , author=. 2012 , publisher=
2012
-
[46]
and Johansson, K.H
Heemels, W.P.M.H. and Johansson, K.H. and Tabuada, P. , booktitle=. An introduction to event-triggered and self-triggered control , year=
-
[47]
Signal analysis and prediction , pages=
System identification , author=. Signal analysis and prediction , pages=. 1998 , publisher=
1998
-
[48]
N.; Barber, R
Angelopoulos, A. N.; Barber, R. F.; and Bates, S. 2025. Theoretical Foundations of Conformal Prediction. Preprint
2025
-
[49]
A Gentle Introduction to Conformal Prediction and Distribution-Free Uncertainty Quantification
Angelopoulos, A. N.; and Bates, S. 2022. A Gentle Introduction to Conformal Prediction and Distribution-Free Uncertainty Quantification. arXiv preprint arXiv:2107.07511
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[50]
N.; Cand \`e s, E.; and Tibshirani, R
Angelopoulos, A. N.; Cand \`e s, E.; and Tibshirani, R. J. 2023. Conformal PID Control for Time Series Prediction. In Advances in Neural Information Processing Systems
2023
-
[51]
Anil, C.; Lucas, J.; and Grosse, R. 2019. Sorting Out Lipschitz Function Approximation. In International Conference on Machine Learning, volume 97 of Proceedings of Machine Learning Research, 291--301. PMLR
2019
-
[52]
Bakhtiaridoust, M.; Yadegar, M.; and Meskin, N. 2023. Data-driven fault detection and isolation of nonlinear systems using deep learning for Koopman operator. ISA transactions, 134: 200--211
2023
-
[53]
F.; Cand \`e s, E.; Ramdas, A.; and Tibshirani, R
Barber, R. F.; Cand \`e s, E.; Ramdas, A.; and Tibshirani, R. J. 2023. Conformal Prediction Beyond Exchangeability. Annals of Statistics, 51(2): 816--845
2023
-
[54]
Boyarsky, A.; and Gora, P. 2012. Laws of chaos: invariant measures and dynamical systems in one dimension. Springer Science & Business Media
2012
-
[55]
Ciss \'e , M.; Bojanowski, P.; Grave, E.; Dauphin, Y.; and Usunier, N. 2017. Parseval Networks: Improving Robustness to Adversarial Examples. In International Conference on Machine Learning, volume 70 of Proceedings of Machine Learning Research, 854--863. PMLR
2017
-
[56]
J.; and Lindemann, L
Cleaveland, M.; Lee, I.; Pappas, G. J.; and Lindemann, L. 2024. Conformal prediction regions for time series using linear complementarity programming. In AAAI Conference on Artificial Intelligence, volume 38, 20984--20992
2024
-
[57]
Ding, J.; and Zhou, A. 1996. Finite approximations of Frobenius--Perron operators: A solution of Ulam's conjecture to multi-dimensional transformations. Physica D: Nonlinear Phenomena, 92(1--2): 61--68
1996
-
[58]
Fazlyab, M.; Robey, A.; Hassani, H.; Morari, M.; and Pappas, G. J. 2019. Efficient and Accurate Estimation of Lipschitz Constants for Deep Neural Networks. In Advances in Neural Information Processing Systems, volume 32
2019
-
[59]
Gibbs, I.; and Cand \`e s, E. 2021. Adaptive Conformal Inference under Distribution Shift. In Advances in Neural Information Processing Systems
2021
-
[60]
Gibbs, I.; and Cand \`e s, E. 2024. Conformal Inference for Online Prediction with Arbitrary Distribution Shifts. Journal of Machine Learning Research, 25: 1--36
2024
-
[61]
Heemels, W.; Johansson, K.; and Tabuada, P. 2012. An introduction to event-triggered and self-triggered control. In 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), 3270--3285
2012
-
[62]
Lasota, A.; and Mackey, M. C. 1994. Chaos, Fractals, and Noise: Stochastic Aspects of Dynamics. Springer, 2 edition
1994
-
[63]
Lasota, A.; and Mackey, M. C. 2013. Chaos, fractals, and noise: stochastic aspects of dynamics, volume 97. Springer Science & Business Media
2013
-
[64]
Li, T.-Y. 1976. Finite approximation for the Frobenius--Perron operator: A solution to Ulam's conjecture. Journal of Approximation Theory, 17(2): 177--186
1976
-
[65]
Lindemann, L.; Cleaveland, M.; Shim, G.; and Pappas, G. J. 2023. Safe Planning in Dynamic Environments Using Conformal Prediction. IEEE Robotics and Automation Letters, 8(8): 5116--5123
2023
-
[66]
Ljung, L. 1998. System identification. In Signal analysis and prediction, 163--173. Springer
1998
-
[67]
P.; and Tweedie, R
Meyn, S. P.; and Tweedie, R. L. 2009. Markov Chains and Stochastic Stability. Cambridge University Press, 2 edition
2009
-
[68]
Miyato, T.; Kataoka, T.; Koyama, M.; and Yoshida, Y. 2018. Spectral Normalization for Generative Adversarial Networks. In International Conference on Learning Representations
2018
-
[69]
Romano, Y.; Patterson, E.; and Cand \`e s, E. 2019. Conformalized Quantile Regression. In Advances in Neural Information Processing Systems
2019
-
[70]
Shafer, G.; and Vovk, V. 2008. A Tutorial on Conformal Prediction. Journal of Machine Learning Research, 9: 371--421
2008
-
[71]
M.; and van der Schaar, M
Stankevi c i \= u t \.e , K.; Alaa, A. M.; and van der Schaar, M. 2021. Conformal Time-Series Forecasting. In Advances in Neural Information Processing Systems
2021
-
[72]
J.; Barber, R
Tibshirani, R. J.; Barber, R. F.; Cand \`e s, E.; and Ramdas, A. 2019. Conformal Prediction under Covariate Shift. In Advances in Neural Information Processing Systems, volume 32
2019
-
[73]
Vovk, V. 2012. Conditional validity of inductive conformal predictors. In Asian Conference on Machine Learning, 475--490
2012
-
[74]
Xu, C.; and Xie, Y. 2021. Conformal Prediction Interval for Dynamic Time-Series. In International Conference on Machine Learning
2021
-
[75]
Yoshida, Y.; and Miyato, T. 2017. Spectral Norm Regularization for Improving the Generalizability of Deep Learning. arXiv preprint arXiv:1705.10941
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[76]
Zaffran, M.; F \'e ron, O.; Goude, Y.; Josse, J.; and Dieuleveut, A. 2022. Adaptive Conformal Predictions for Time Series. In International Conference on Machine Learning
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.