SoftPINCH: EMG-Driven Soft Exoskeleton Assistance for Finger Flexion and Grasping
Pith reviewed 2026-06-28 06:20 UTC · model grok-4.3
The pith
EMG-driven soft exoskeleton reduces muscular effort in finger flexion and grasping by up to 92.6 percent at high loads.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
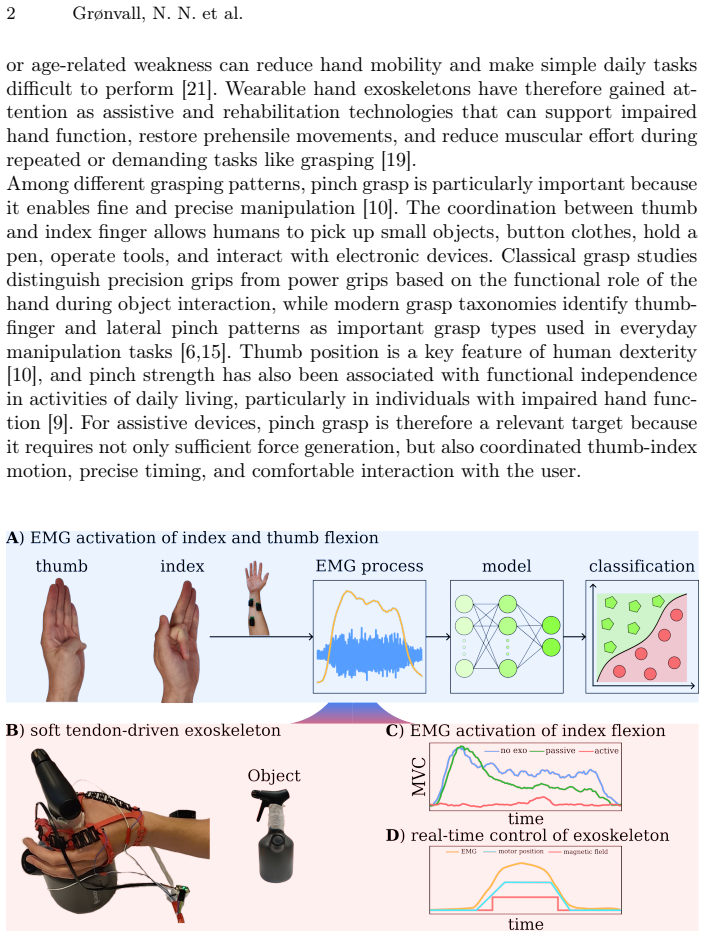
SoftPINCH shows that a soft tendon-driven exoskeleton controlled by a CNN+LSTM model of forearm sEMG signals can deliver real-time pinch assistance, reaching 99.4 percent subject-independent decoding accuracy and cutting muscular effort by 92.6 percent during the heaviest weighted grasping trials.
What carries the argument
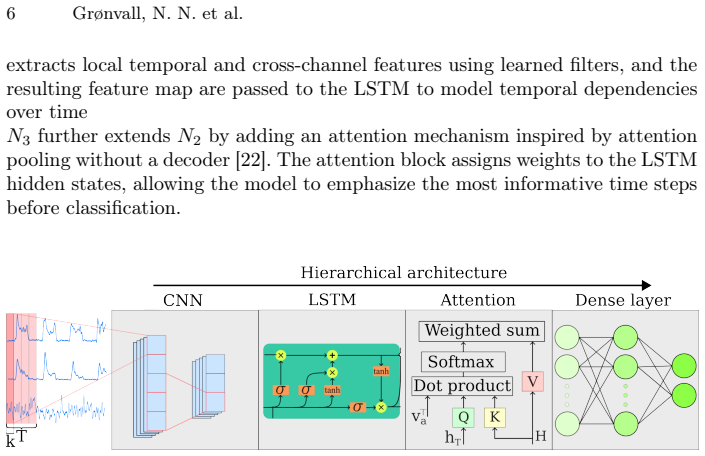
CNN+LSTM neural decoder that maps forearm EMG to flexion intentions, paired with a tendon-driven soft glove and magnetic fingertip contact sensors for closed-loop assistance.
If this is right
- Active assistance lowers muscular effort during isolated index and thumb flexion.
- Effort reduction occurs at every tested load during weighted grasping.
- The CNN+LSTM model supports reliable real-time control without per-user retraining.
- The soft tendon design permits natural hand motion while providing mechanical help.
Where Pith is reading between the lines
- The same decoding approach could support multi-finger coordination if extended beyond pinch.
- Magnetic contact sensing may help reject motion artifacts that often degrade EMG-only systems.
- Lower effort during daily tasks might allow longer use sessions in rehabilitation settings.
Load-bearing premise
That leave-one-subject-out validation on the tested group captures enough real-world EMG variability for the reported accuracy and effort reductions to hold outside the lab.
What would settle it
A follow-up test on new users with varied arm sizes, electrode shifts, or fatigue that shows the effort reduction falling well below the 92.6 percent figure or the decoding accuracy dropping below 95 percent.
Figures
read the original abstract
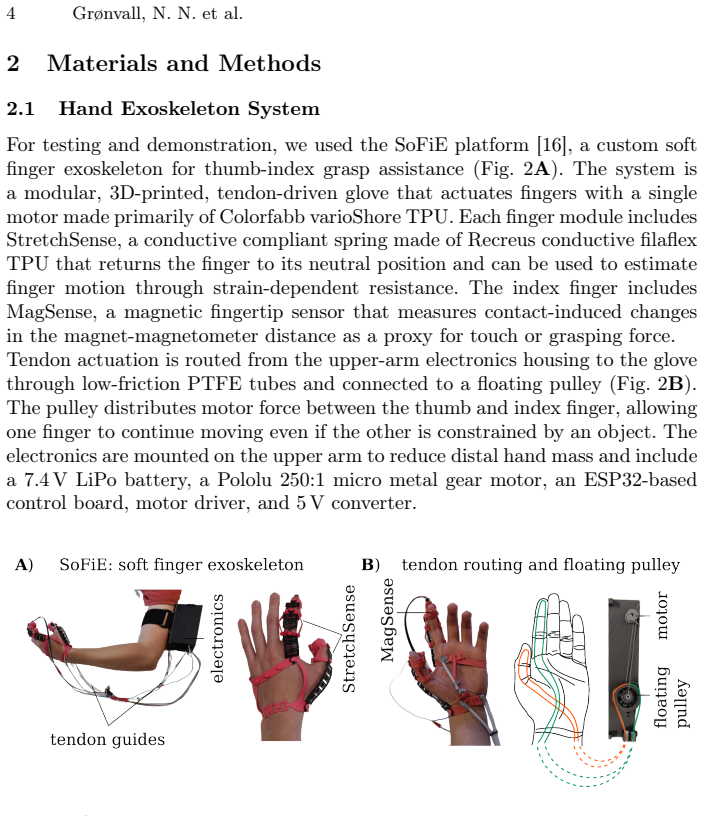
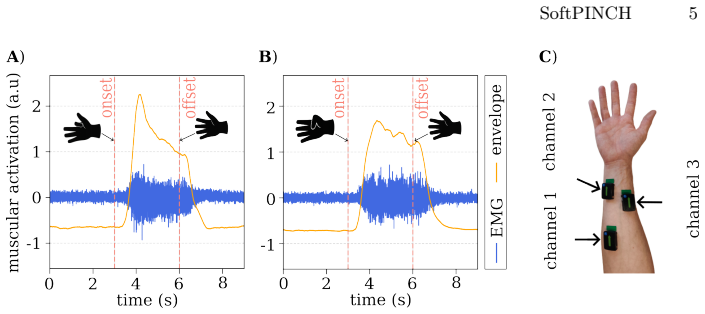
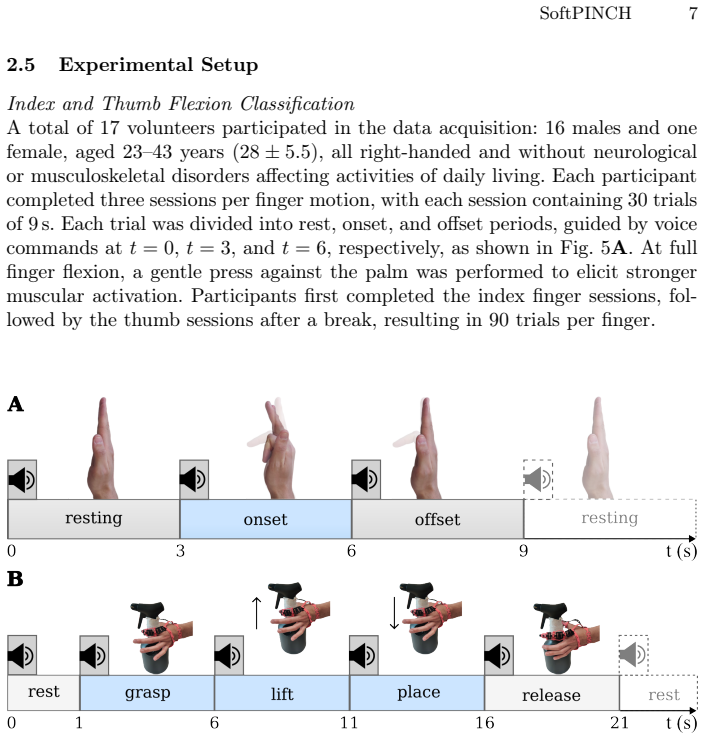
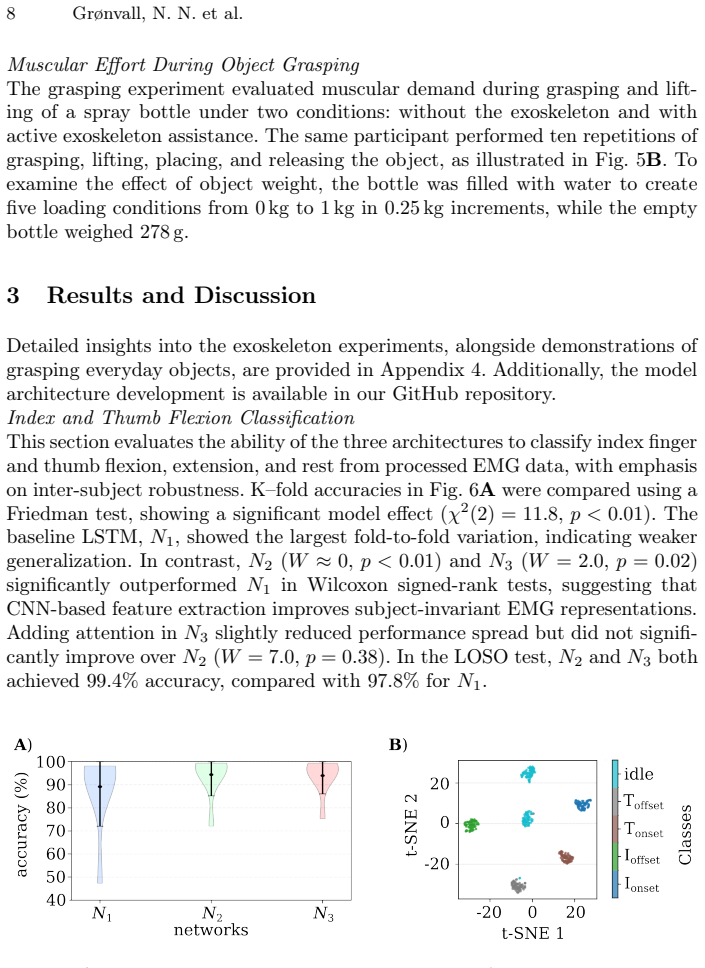
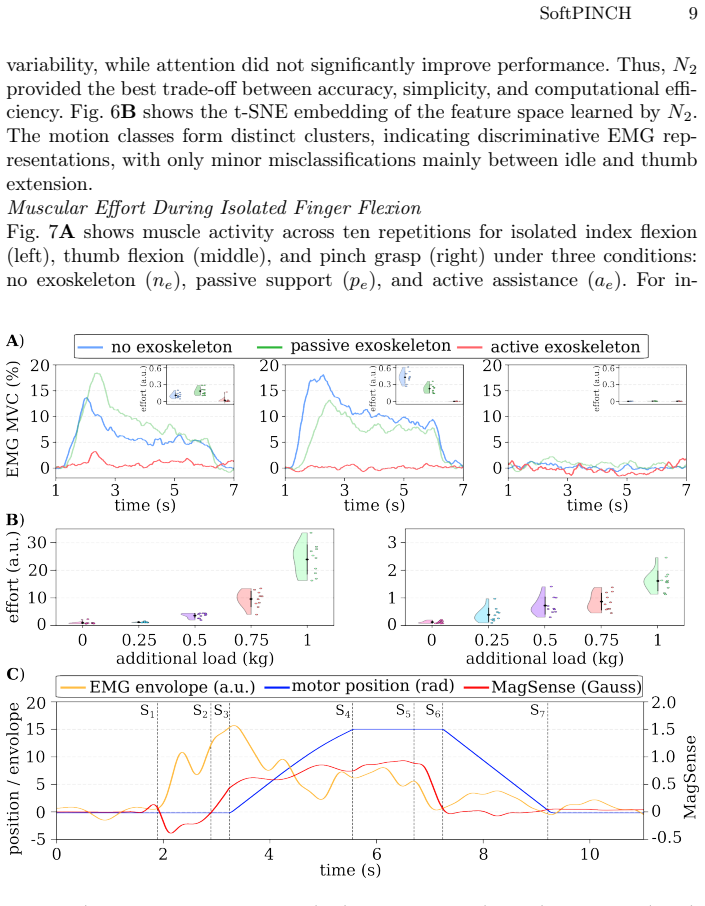
Surface electromyography (sEMG) provides a non-invasive interface for detecting hand-movement intention and controlling wearable assistive devices. However, reliable EMG-driven hand assistance remains challenging because EMG signals are affected by noise, motion artifacts, electrode placement, muscle fatigue, and inter-subject variability. At the same time, many hand exoskeletons remain mechanically restrictive or bulky, limiting comfort and natural hand motion. This work presents SoftPINCH, an EMG-driven soft wearable exoskeleton for thumb-index finger flexion and pinch grasp assistance. The system combines a tendon-driven soft exoskeleton, fingertip magnetic contact sensing, and neural EMG decoding for intention-based assistance. Surface EMG was recorded from forearm muscles during index and thumb movements, and three subject-independent decoding architectures were evaluated: LSTM, CNN+LSTM, and CNN+LSTM with attention. The CNN+LSTM and CNN+LSTM-attention models both achieved 99.4% LOSO test accuracy, outperforming the standalone LSTM, which reached 97.8%. However, the attention mechanism did not provide a significant improvement over CNN+LSTM, indicating that CNN-based feature extraction was sufficient for robust EMG representation. The CNN+LSTM model was therefore selected for real-time deployment due to its high accuracy and lower architectural complexity. Functional evaluation showed that active exoskeleton assistance reduced muscular effort during isolated finger flexion and object grasping. During weighted grasping, assistance reduced muscular effort across all tested loads, with a 92.6% reduction at the highest load. These results demonstrate the potential of SoftPINCH for intuitive, low-effort pinch assistance using real-time EMG-driven soft robotic control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces SoftPINCH, a tendon-driven soft exoskeleton for thumb-index flexion and pinch grasp that uses forearm sEMG decoded by a CNN+LSTM model for intention-based assistance. It reports 99.4% LOSO accuracy for the selected model on isolated movements and, in functional trials, a 92.6% reduction in muscular effort during weighted grasping at the highest load, along with effort reductions in isolated flexion and object grasping.
Significance. If the online decoder performance and effort-reduction measurements hold under real conditions, the work would demonstrate a practical, low-profile EMG-driven soft hand exoskeleton with quantified functional benefit, advancing wearable robotics for grasp assistance.
major comments (3)
- [Functional evaluation] Functional evaluation section: the central claim of a 92.6% muscular-effort reduction at the highest load during weighted grasping requires that the deployed CNN+LSTM decoder correctly detects intention in real time under motion artifacts, fatigue, and dynamic conditions; however, no online accuracy, confusion matrices, false-positive rates, or artifact-rejection metrics are reported for the actual grasping trials.
- [Methods, EMG decoding] Methods, EMG decoding and model selection: the CNN+LSTM model is chosen for real-time deployment solely on the basis of 99.4% offline LOSO accuracy on isolated movements, yet the paper provides no evidence or ablation showing that this offline performance generalizes to the dynamic, loaded grasping tasks where the effort-reduction result is measured.
- [Results, muscular effort] Results, muscular effort quantification: the reported effort reductions lack explicit details on EMG signal normalization, statistical testing, number of trials per condition, or controls for confounds such as learning effects, altered posture, or mechanical assistance independent of decoder output.
minor comments (2)
- [Abstract and Results] The abstract and results text should clarify whether the 92.6% reduction figure is an average across subjects or a single-condition value, and whether it is accompanied by variance or significance testing.
- [Methods] Notation for the three decoding architectures (LSTM, CNN+LSTM, CNN+LSTM-attention) should be introduced consistently in the methods before the accuracy numbers are presented.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment below and indicate planned revisions to strengthen the manuscript's clarity and rigor.
read point-by-point responses
-
Referee: [Functional evaluation] Functional evaluation section: the central claim of a 92.6% muscular-effort reduction at the highest load during weighted grasping requires that the deployed CNN+LSTM decoder correctly detects intention in real time under motion artifacts, fatigue, and dynamic conditions; however, no online accuracy, confusion matrices, false-positive rates, or artifact-rejection metrics are reported for the actual grasping trials.
Authors: We agree that reporting online decoder performance metrics during the functional grasping trials would provide stronger direct support for the effort-reduction claims. The current manuscript presents offline LOSO accuracy on isolated movements and the observed effort reductions with the deployed real-time system. In revision we will expand the functional evaluation section to explicitly discuss the assumptions made about decoder behavior under dynamic conditions and to note the absence of separate online accuracy metrics as a limitation. We will also clarify the trial conditions under which the 92.6% reduction was measured. revision: partial
-
Referee: [Methods, EMG decoding] Methods, EMG decoding and model selection: the CNN+LSTM model is chosen for real-time deployment solely on the basis of 99.4% offline LOSO accuracy on isolated movements, yet the paper provides no evidence or ablation showing that this offline performance generalizes to the dynamic, loaded grasping tasks where the effort-reduction result is measured.
Authors: Model selection prioritized the highest subject-independent accuracy on the core intention-detection task while maintaining lower complexity for real-time use. The functional results supply indirect evidence of generalization through the measured effort reductions. We will revise the methods and discussion sections to state this rationale more explicitly and to acknowledge that direct cross-condition ablation or online validation on loaded tasks is not provided in the current study. revision: yes
-
Referee: [Results, muscular effort] Results, muscular effort quantification: the reported effort reductions lack explicit details on EMG signal normalization, statistical testing, number of trials per condition, or controls for confounds such as learning effects, altered posture, or mechanical assistance independent of decoder output.
Authors: We will revise the results and methods sections to supply the requested details on EMG normalization, the statistical tests performed, the number of trials per condition, and any controls used for potential confounds. These additions will improve transparency and reproducibility of the effort-reduction findings. revision: yes
Circularity Check
No circularity: empirical ML evaluation and hardware measurements on held-out data
full rationale
The paper reports training of LSTM/CNN+LSTM models on forearm EMG for movement classification, using leave-one-subject-out cross-validation to select the CNN+LSTM architecture (99.4% accuracy), followed by real-time deployment and direct measurement of muscular effort reduction during physical grasping tasks with varying loads. No equations, derivations, or parameter fits are presented that reduce the reported accuracy or effort-reduction percentages to quantities defined by the same fitted parameters or self-citations. The central results are externally falsifiable via physical sensors and held-out subject data; the derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In: IEEE Life Sciences Conference (LSC)
Bhowmik, S., Jelfs, B., Arjunan, S.P., Kumar, D.K.: Outlier removal in facial sur- face electromyography through hampel filtering technique. In: IEEE Life Sciences Conference (LSC). pp. 258–261 (2017)
2017
-
[2]
Journal of NeuroEngineering and Rehabilitation (2018)
Chu, C., Patterson, R.: Soft robotic devices for hand rehabilitation and assistance: a narrative review. Journal of NeuroEngineering and Rehabilitation (2018)
2018
-
[3]
In: Proceedings of the 5th international conference on physio- logical computing systems (2018)
Cornelis, J., Cornelis, B., Jansen, B., Tsinganos, P.: Deep learning in emg-based gesture recognition. In: Proceedings of the 5th international conference on physio- logical computing systems (2018)
2018
-
[4]
com/trigno-user-guide.pdf, accessed: 2025-03-15
Delsys, Inc.: Trigno Wireless System User Guide (2021),https://www.delsys. com/trigno-user-guide.pdf, accessed: 2025-03-15
2021
-
[5]
Dollar, A.M.: Classifying Human Hand Use and the Activities of Daily Living, pp. 201–216. Springer International Publishing, Cham (2014).https://doi.org/10. 1007/978-3-319-03017-3_10
2014
-
[6]
Feix, T., Romero, J., Schmiedmayer, H.B., Dollar, A.M., Kragic, D.: The grasp taxonomy of human grasp types. IEEE Transactions on Human-Machine Systems 46(1), 66–77 (2016).https://doi.org/10.1109/THMS.2015.2470657
-
[7]
arXiv preprint arXiv:1308.0850 (2013) 12 Grønvall, N
Graves, A.: Generating sequences with recurrent neural networks. arXiv preprint arXiv:1308.0850 (2013) 12 Grønvall, N. N. et al
Pith/arXiv arXiv 2013
-
[8]
Neural Computation 9(8), 1735–1780 (1997)
Hochreiter, S., Schmidhuber, J.: Long short-term memory. Neural Computation 9(8), 1735–1780 (1997)
1997
-
[9]
Ann Rehabil Med39(5), 752–762 (2015).https://doi.org/10.5535/ arm.2015.39.5.752
Hyun, B.J., Hyun, K.S., Mook, S.K., Don-Kyu, K., Iee, S.H., Eun, S.H.: Rela- tionship between grip and pinch strength and activities of daily living in stroke patients. Ann Rehabil Med39(5), 752–762 (2015).https://doi.org/10.5535/ arm.2015.39.5.752
2015
-
[10]
Current Biology31(6), R289–R291 (2021).https://doi.org/10.1016/j.cub.2021.02.021
Kivell, T.L.: Human evolution: Thumbs up for efficiency. Current Biology31(6), R289–R291 (2021).https://doi.org/10.1016/j.cub.2021.02.021
-
[11]
Sensors22(1) (2022)
Lee, K.H., Min, J.Y., Byun, S.: Electromyogram-based classification of hand and finger gestures using artificial neural networks. Sensors22(1) (2022)
2022
-
[12]
In: 2019 IEEE 32nd Computer Security Foundations Symposium (CSF), pp
Li, M., He, B., Liang, Z., Zhao, C.G., Chen, J., Zhuo, Y., Xu, G., Xie, J., Althoefer, K.: An attention-controlled hand exoskeleton for the rehabilitation of finger exten- sion and flexion using a rigid-soft combined mechanism. Frontiers in Neurorobotics V olume 13(2019).https://doi.org/10.3389/fnbot.2019.00034
-
[13]
Loshchilov, I., Hutter, F.: Fixing weight decay regularization in adam. CoRR abs/1711.05101(2017)
Pith/arXiv arXiv 2017
-
[14]
Frontiers in Neu- rologyV olume 8 - 2017(2017).https://doi.org/10.3389/fneur.2017.00107
Lu, Z., Tong, K.y., Shin, H., Li, S., Zhou, P.: Advanced myoelectric control for robotic hand-assisted training: Outcome from a stroke patient. Frontiers in Neu- rologyV olume 8 - 2017(2017).https://doi.org/10.3389/fneur.2017.00107
-
[15]
The Journal of Bone & Joint Surgery British Volume38-B(4), 902–913 (1956).https://doi.org/10
Napier, J.R.: The prehensile movements of the human hand. The Journal of Bone & Joint Surgery British Volume38-B(4), 902–913 (1956).https://doi.org/10. 1302/0301-620X.38B4.902
1956
-
[16]
Nielsen, M.M.S., Grønvall, N.N., Xiong, X., Babu, S.P.M.: Sofie: Soft finger ex- oskeleton for intelligent grasping (2026),https://arxiv.org/abs/2606.00397
Pith/arXiv arXiv 2026
-
[17]
In: StatPearls [Internet]
Okwumabua, E., Sinkler, M.A., Bordoni, B.: Anatomy, shoulder and upper limb, hand muscles. In: StatPearls [Internet]. StatPearls Publishing (2025)
2025
-
[18]
In: ECTI-CON2010
Phinyomark, A., Hirunviriya, S., Limsakul, C., Phukpattaranont, P.: Evaluation of emg feature extraction for hand movement recognition based on euclidean distance and standard deviation. In: ECTI-CON2010. pp. 856–860 (2010)
2010
-
[19]
Robotics10(1) (2021)
du Plessis, T., Djouani, K., Oosthuizen, C.: A review of active hand exoskeletons for rehabilitation and assistance. Robotics10(1) (2021)
2021
-
[20]
Tsagarakis, and Enrico Mingo Hoffman
Polygerinos, P., Wang, Z., Galloway, K.C., Wood, R.J., Walsh, C.J.: Soft robotic glove for combined assistance and at-home rehabilitation. Robotics and Autonomous Systems73, 135–143 (2015).https://doi.org/10.1016/j.robot. 2014.08.014, wearable Robotics
-
[21]
Proietti, T., Bandini, A.: Wearable technologies for monitoring upper extremity functionsduringdailylifeinneurologicallyimpairedindividuals.IEEEtransactions on neural systems and rehabilitation engineering32, 2737–2748 (2024).https: //doi.org/10.1109/TNSRE.2024.3435042
-
[22]
dos Santos, C., Tan, M., Xiang, B., Zhou, B.: Attentive pooling networks (2016)
2016
-
[23]
IEEE Transactions on Haptics12(4), 400–413 (2019).https://doi.org/10.1109/TOH
Sarac,M.,Solazzi,M.,Frisoli,A.:Designrequirementsofgenerichandexoskeletons and survey of hand exoskeletons for rehabilitation, assistive, or haptic use. IEEE Transactions on Haptics12(4), 400–413 (2019).https://doi.org/10.1109/TOH. 2019.2924881
work page doi:10.1109/toh 2019
-
[24]
arXiv preprint arXiv:1609.0349912(1) (2016)
Van Den Oord, A., Dieleman, S., Zen, H., Simonyan, K., Vinyals, O., Graves, A., Kalchbrenner, N., Senior, A., Kavukcuoglu, K., et al.: Wavenet: A generative model for raw audio. arXiv preprint arXiv:1609.0349912(1) (2016)
Pith/arXiv arXiv 2016
-
[25]
Advances in neural information pro- cessing systems30(2017)
Vaswani,A.,Shazeer,N.,Parmar,N.,Uszkoreit,J.,Jones,L.,Gomez,A.N.,Kaiser, Ł., Polosukhin, I.: Attention is all you need. Advances in neural information pro- cessing systems30(2017)
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.