Enhanced INS/GNSS State Estimation using GNSS-Based Acceleration Measurements
Pith reviewed 2026-06-30 12:46 UTC · model grok-4.3
The pith
Extracting acceleration from sequences of past GNSS positions and adding it to an INS/GNSS filter improves positioning accuracy by 11-21 percent on real vehicle data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
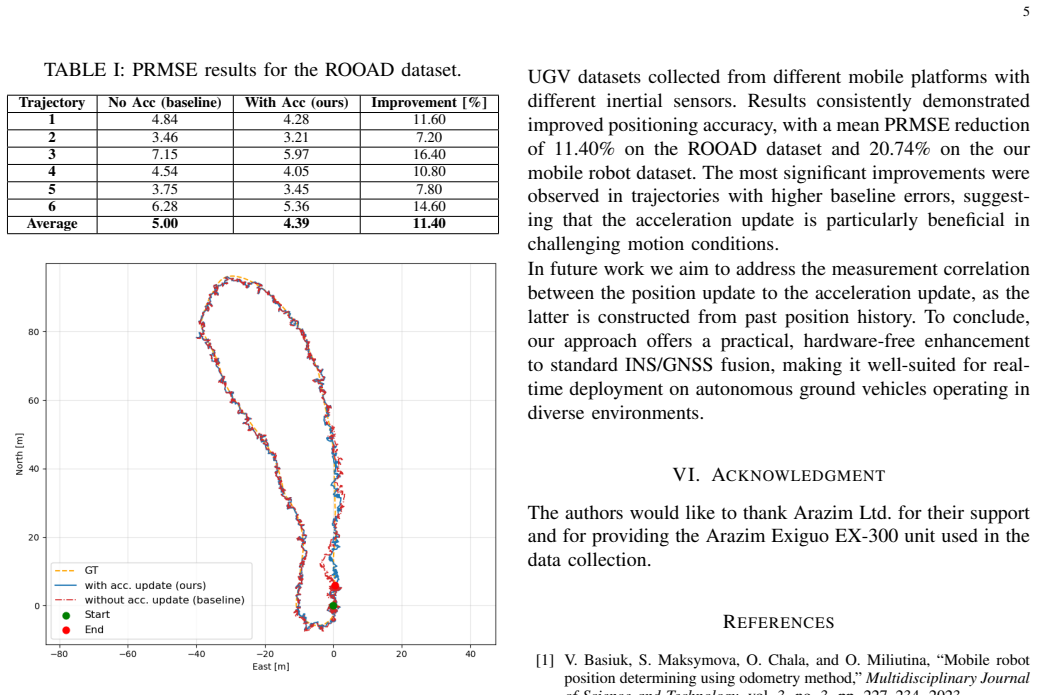
The central claim is that acceleration values extracted from sequences of past GNSS positions via a motion model can be integrated into the INS/GNSS filter as an additional measurement update, supplying observability that position updates alone lack and thereby producing consistent reductions in position root-mean-square error of 11.40 percent and 20.74 percent on the two evaluated real-world datasets.
What carries the argument
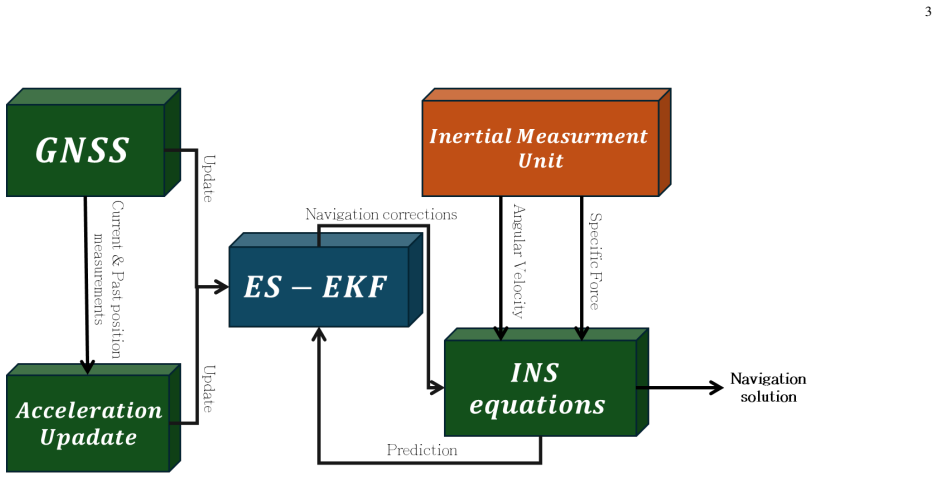
The GNSS-derived acceleration measurement obtained from past position sequences through a motion model and inserted as an extra update in the INS/GNSS Kalman filter.
Load-bearing premise
Acceleration values computed from GNSS position sequences must be accurate enough and sufficiently independent of the position measurements themselves to supply new information that improves the filter.
What would settle it
On the same two datasets, running the standard position-aided filter and the version with added acceleration updates yields position root-mean-square errors that differ by less than 2 percent or show no consistent improvement in either direction.
Figures
read the original abstract
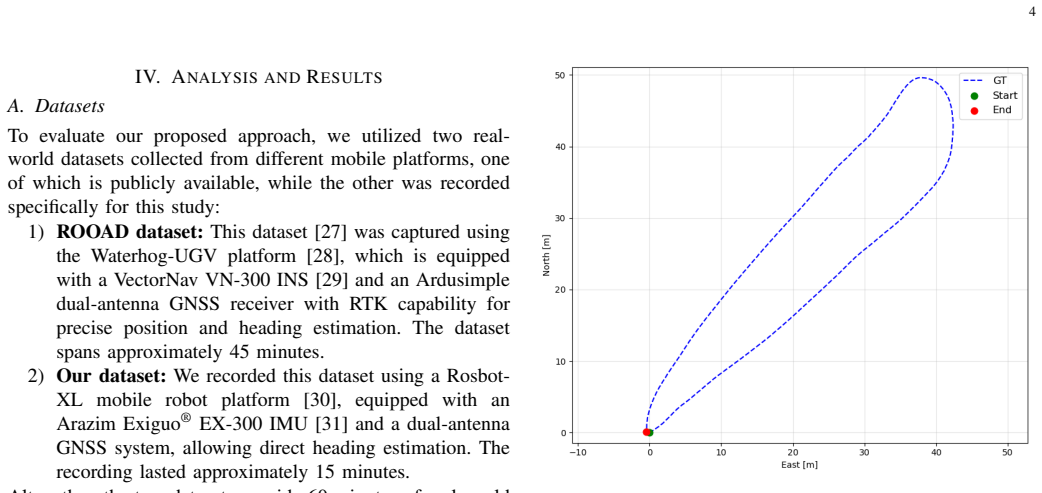
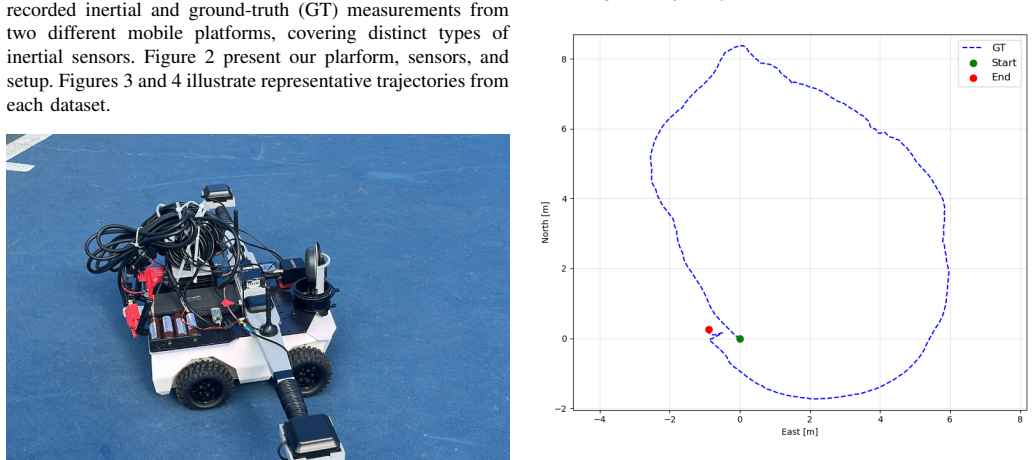
Accurate and reliable navigation is essential for autonomous ground vehicle operations. Standard INS/GNSS fusion relies on GNSS position updates, which provide limited observability of orientation and inertial sensor error states, particularly during low-dynamic motion. In this work, we propose utilizing past GNSS measurements alongside a motion model to extract meaningful vehicle acceleration information. This acceleration measurement is then integrated into the INS/GNSS filter to improve its robustness and accuracy. The proposed approach is evaluated on two real-world unmanned ground vehicle datasets collected from different mobile platforms and inertial sensor grades. Results demonstrate consistent positioning accuracy improvements relative to the standard position-aided filter, with mean position root mean square error improvements of 11.40 % and 20.74 % on the two datasets, respectively.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes extracting vehicle acceleration from sequences of past GNSS position measurements using an assumed motion model and incorporating these as additional measurements in an INS/GNSS Kalman filter to improve observability of orientation and inertial sensor errors, especially in low-dynamic regimes. On two real-world UGV datasets from different platforms and sensor grades, the method reports mean position RMSE improvements of 11.40% and 20.74% relative to a standard position-aided INS/GNSS filter.
Significance. If the derived accelerations supply genuinely independent information, the approach could provide a practical, sensor-free enhancement to INS/GNSS fusion for autonomous ground vehicles. The evaluation on real datasets from distinct hardware is a positive aspect. However, the central empirical claim hinges on whether the acceleration measurements add observability beyond the position updates themselves.
major comments (3)
- [Experimental results / filter implementation] The skeptic concern is load-bearing: accelerations computed from the same GNSS position sequence via a motion model are likely to share error sources (multipath, clock bias, model mismatch) with the position measurements. The manuscript must demonstrate that the acceleration innovations are not redundant; this requires explicit analysis of cross-covariance between position and acceleration residuals or innovation whiteness tests in the experimental section.
- [Measurement model / acceleration extraction] The abstract and method description provide no information on the specific motion model used to derive acceleration, the time window or differentiation scheme, or the associated noise covariance. Without these, it is impossible to assess whether the reported RMSE gains arise from new information or from optimistic tuning that re-uses correlated data.
- [Results tables/figures] Table or figure reporting the RMSE values should include the baseline filter tuning parameters, the acceleration measurement noise model, and any sensitivity analysis to the motion-model assumptions. The 11.40% and 20.74% figures cannot be interpreted without this context.
minor comments (2)
- Clarify the notation for the state vector and measurement models to distinguish the standard position-aided filter from the proposed acceleration-aided version.
- Add a brief discussion of computational overhead introduced by the additional measurement update.
Simulated Author's Rebuttal
We thank the referee for the thorough and constructive review. The comments highlight important aspects of demonstrating the independence of the proposed acceleration measurements and providing sufficient implementation details. We address each major comment below and will revise the manuscript accordingly to strengthen the presentation.
read point-by-point responses
-
Referee: [Experimental results / filter implementation] The skeptic concern is load-bearing: accelerations computed from the same GNSS position sequence via a motion model are likely to share error sources (multipath, clock bias, model mismatch) with the position measurements. The manuscript must demonstrate that the acceleration innovations are not redundant; this requires explicit analysis of cross-covariance between position and acceleration residuals or innovation whiteness tests in the experimental section.
Authors: We agree that explicit verification of non-redundancy is necessary to support the central claim. In the revised manuscript we will add, in the experimental section, both the cross-covariance matrix between position and acceleration residuals and innovation whiteness tests (autocorrelation of normalized innovations) for the two datasets. These analyses will quantify the degree of independence and show that the acceleration channel supplies complementary information beyond the position updates. revision: yes
-
Referee: [Measurement model / acceleration extraction] The abstract and method description provide no information on the specific motion model used to derive acceleration, the time window or differentiation scheme, or the associated noise covariance. Without these, it is impossible to assess whether the reported RMSE gains arise from new information or from optimistic tuning that re-uses correlated data.
Authors: The method section of the manuscript does describe the extraction procedure, but we acknowledge that the level of detail is insufficient for reproducibility and evaluation. In the revision we will expand Section III to explicitly state the assumed motion model (constant-acceleration kinematic model over a sliding window), the window length and differentiation scheme employed, and the derivation of the acceleration measurement noise covariance from GNSS position error statistics. These additions will allow readers to assess the independence of the derived measurements. revision: yes
-
Referee: [Results tables/figures] Table or figure reporting the RMSE values should include the baseline filter tuning parameters, the acceleration measurement noise model, and any sensitivity analysis to the motion-model assumptions. The 11.40% and 20.74% figures cannot be interpreted without this context.
Authors: We will augment the results section with a new table (or expanded caption) that reports the baseline INS/GNSS filter tuning parameters (process and measurement noise covariances), the acceleration measurement noise model parameters, and a brief sensitivity study varying the motion-model window length. This will provide the necessary context for interpreting the reported RMSE improvements. revision: yes
Circularity Check
No circularity: empirical comparison on independent datasets
full rationale
The paper proposes extracting vehicle acceleration from sequences of past GNSS positions via a motion model and fusing the resulting measurements into an INS/GNSS filter. Reported gains (11.40 % and 20.74 % mean position RMSE) are obtained by direct numerical comparison against a standard position-aided baseline on two separate real-world UGV datasets. No equations, fitted parameters, or self-citations are shown to reduce the claimed improvements to quantities defined by the inputs themselves. The central claim therefore rests on external empirical evidence rather than on any of the enumerated circular patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard assumptions of the INS/GNSS Kalman filter (linearized error dynamics, Gaussian noise, etc.) remain valid when an additional acceleration measurement is introduced.
Reference graph
Works this paper leans on
-
[1]
Mobile robot position determining using odometry method,
V . Basiuk, S. Maksymova, O. Chala, and O. Miliutina, “Mobile robot position determining using odometry method,”Multidisciplinary Journal of Science and Technology, vol. 3, no. 3, pp. 227–234, 2023
2023
-
[2]
A comprehensive study of mobile robot: history, developments, applications, and future research perspectives,
R. Raj and A. Kos, “A comprehensive study of mobile robot: history, developments, applications, and future research perspectives,”Applied Sciences, vol. 12, no. 14, p. 6951, 2022
2022
-
[3]
Multiple mobile robot task and motion planning: A survey,
L. Antonyshyn, J. Silveira, S. Givigi, and J. Marshall, “Multiple mobile robot task and motion planning: A survey,”ACM Computing Surveys, vol. 55, no. 10, pp. 1–35, 2023
2023
-
[4]
Mobile robotics in smart farming: current trends and applications,
D. F. Yépez-Ponce, J. V . Salcedo, P. D. Rosero-Montalvo, and J. Sanchis, “Mobile robotics in smart farming: current trends and applications,” Frontiers in Artificial Intelligence, vol. 6, p. 1213330, 2023
2023
-
[5]
An intelligence-based hybrid PSO-SA for mobile robot path planning in warehouse,
S. Lin, A. Liu, J. Wang, and X. Kong, “An intelligence-based hybrid PSO-SA for mobile robot path planning in warehouse,”Journal of Computational Science, vol. 67, p. 101938, 2023
2023
-
[6]
Design and implementation of an integrated control system for omnidirectional mobile robots in industrial logistics,
A. Neaz, S. Lee, and K. Nam, “Design and implementation of an integrated control system for omnidirectional mobile robots in industrial logistics,”Sensors, vol. 23, no. 6, p. 3184, 2023
2023
-
[7]
LiDAR-based SLAM for robotic mapping: state of the art and new frontiers,
X. Yue, Y . Zhang, J. Chen, J. Chen, X. Zhou, and M. He, “LiDAR-based SLAM for robotic mapping: state of the art and new frontiers,”Industrial Robot: the international journal of robotics research and application, vol. 51, no. 2, pp. 196–205, 2024
2024
-
[8]
A robust autonomous navigation and mapping system based on GPS and LiDAR data for unconstraint environment,
J. Patoliya, H. Mewada, M. Hassaballah, M. A. Khan, and S. Kadry, “A robust autonomous navigation and mapping system based on GPS and LiDAR data for unconstraint environment,”Earth Science Informatics, vol. 15, no. 4, pp. 2703–2715, 2022
2022
-
[9]
Tightly coupled integration of GNSS, INS, and LiDAR for vehicle navigation in urban environ- ments,
S. Li, S. Wang, Y . Zhou, Z. Shen, and X. Li, “Tightly coupled integration of GNSS, INS, and LiDAR for vehicle navigation in urban environ- ments,”IEEE Internet of Things Journal, vol. 9, no. 24, pp. 24721– 24735, 2022
2022
-
[10]
Bar-Shalom, X
Y . Bar-Shalom, X. R. Li, and T. Kirubarajan,Estimation with applica- tions to tracking and navigation: theory algorithms and software. John Wiley & Sons, 2001
2001
-
[11]
Principles of GNSS, inertial, and multisensor integrated navigation systems„
P. D. Groves, “Principles of GNSS, inertial, and multisensor integrated navigation systems„”IEEE Aerospace and Electronic Systems Magazine, vol. 30, no. 2, pp. 26–27, 2015
2015
-
[12]
Error state extended Kalman filter localization for underground mining environments,
I. Brigadnov, A. Lutonin, and K. Bogdanova, “Error state extended Kalman filter localization for underground mining environments,”Sym- metry, vol. 15, no. 2, p. 344, 2023
2023
-
[13]
GNSS/INS fusion with virtual lever-arm measurements,
A. Borko, I. Klein, and G. Even-Tzur, “GNSS/INS fusion with virtual lever-arm measurements,”Sensors, vol. 18, no. 7, p. 2228, 2018
2018
-
[14]
An effective integrity monitoring scheme for GNSS/INS/vision integration based on error state EKF model,
H. Jiang, T. Li, D. Song, and C. Shi, “An effective integrity monitoring scheme for GNSS/INS/vision integration based on error state EKF model,”IEEE Sensors Journal, vol. 22, no. 7, pp. 7063–7073, 2022. 6
2022
-
[15]
Constrained MEMS-based GNSS/INS tightly coupled system with robust kalman filter for accurate land vehicular navigation,
D. Wang, Y . Dong, Z. Li, Q. Li, and J. Wu, “Constrained MEMS-based GNSS/INS tightly coupled system with robust kalman filter for accurate land vehicular navigation,”IEEE Transactions on Instrumentation and Measurement, vol. 69, no. 7, pp. 5138–5148, 2019
2019
-
[16]
Invariant Kalman filtering,
A. Barrau and S. Bonnabel, “Invariant Kalman filtering,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 1, no. 1, pp. 237– 257, 2018
2018
-
[17]
Neural aided adaptive innovation-based invariant Kalman filter,
B. Diker and I. Klein, “Neural aided adaptive innovation-based invariant Kalman filter,”arXiv preprint arXiv:2603.26709, 2026
-
[18]
Invariant-EKF-based GNSS/INS/vision integration with high convergence and accuracy,
C. Xia, X. Li, S. Li, and Y . Zhou, “Invariant-EKF-based GNSS/INS/vision integration with high convergence and accuracy,” IEEE/ASME Transactions on Mechatronics, 2024
2024
-
[19]
A novel approach for aiding unscented kalman filter for bridging GNSS outages in integrated navigation sys- tems,
N. Al Bitar and A. Gavrilov, “A novel approach for aiding unscented kalman filter for bridging GNSS outages in integrated navigation sys- tems,”Navigation, vol. 68, no. 3, pp. 521–539, 2021
2021
-
[20]
Covariance matching based adaptive unscented Kalman filter for direct filtering in INS/GNSS integration,
Y . Meng, S. Gao, Y . Zhong, G. Hu, and A. Subic, “Covariance matching based adaptive unscented Kalman filter for direct filtering in INS/GNSS integration,”Acta Astronautica, vol. 120, pp. 171–181, 2016
2016
-
[21]
Adaptive neural unscented Kalman filter,
A. Levy and I. Klein, “Adaptive neural unscented Kalman filter,”IEEE Transactions on Intelligent Vehicles, 2026
2026
-
[22]
Information-aided inertial navigation: A review,
D. Engelsman and I. Klein, “Information-aided inertial navigation: A review,”IEEE Transactions on Instrumentation and Measurement, vol. 72, pp. 1–18, 2023
2023
-
[23]
Squeezing position updates for enhanced estimation of land vehicles aided INS,
I. Klein, Y . Lipman, and E. Vaknin, “Squeezing position updates for enhanced estimation of land vehicles aided INS,”IEEE Sensors Journal, vol. 20, no. 16, pp. 9385–9393, 2020
2020
-
[24]
Continuous INS/DVL fusion in situations of DVL outages,
I. Klein and Y . Lipman, “Continuous INS/DVL fusion in situations of DVL outages,” in2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), pp. 1–6, IEEE, 2020
2020
-
[25]
AUV acceleration prediction using DVL and deep learning,
Y . Stolero and I. Klein, “AUV acceleration prediction using DVL and deep learning,” inOCEANS 2025 - Great Lakes, pp. 1–5, 2025
2025
-
[26]
Farrell,Aided navigation: GPS with high rate sensors
J. Farrell,Aided navigation: GPS with high rate sensors. McGraw-Hill, Inc., 2008
2008
-
[27]
ROOAD: RELLIS off-road Odometry Analysis Dataset,
G. Chustz and S. Saripalli, “ROOAD: RELLIS off-road Odometry Analysis Dataset,” 2021
2021
-
[28]
Warthog Unmanned Ground Vehicle Robot
Clearpath Robotics, “Warthog Unmanned Ground Vehicle Robot.” https: //clearpathrobotics.com/warthog-unmanned-ground-vehicle-robot/,
-
[29]
Accessed: 2026-01-18
2026
-
[30]
VN-300 Dual Antenna GNSS/INS Product Page
VectorNav Technologies, “VN-300 Dual Antenna GNSS/INS Product Page.” https://www.vectornav.com/products/detail/vn-300, 2026. Ac- cessed: 2026-01-18
2026
-
[31]
ROSbot XL manual
Husarion, “ROSbot XL manual.” https://husarion.com/manuals/ rosbot-xl/. Accessed: 2026-01-25
2026
-
[32]
Exiguo EX-300 Dual-Antenna GNSS/INS System
Arazim Ltd., “Exiguo EX-300 Dual-Antenna GNSS/INS System.” https: //arazim.com/exiguo-ex-300/, 2026. Accessed: 2026-01-18
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.