High Resolution and High-Speed Live Optical Flow Velocimetry
Pith reviewed 2026-05-22 12:50 UTC · model grok-4.3
The pith
Optical flow velocimetry now computes one velocity vector per pixel in real time from particle images up to 1400 Hz for 1-megapixel frames.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Through targeted algorithmic refinements and GPU optimizations, optical flow velocimetry achieves real-time dense velocity fields with one vector per pixel at frequencies reaching the kilohertz range, specifically handling 32-megapixel images at 90 Hz, 4-megapixel images at 460 Hz, and 1-megapixel images at 1400 Hz, as confirmed on synthetic Rankine vortex and turbulence cases plus experimental cylinder wake measurements.
What carries the argument
The per-pixel optical flow computation, refined for speed and paired with GPU acceleration, replaces window-based correlation to produce dense fields directly from consecutive particle images.
If this is right
- Dense instantaneous velocity fields become available during the experiment rather than only afterward.
- Derived quantities such as vorticity can be computed and displayed live from the velocity data.
- Sustained high-rate acquisition allows recovery of low-frequency flow dynamics over long durations.
- Closed-loop flow control strategies can use the real-time OFV measurements directly.
- Conventional post-processing of large image sets becomes faster and less computationally expensive.
Where Pith is reading between the lines
- The live dense fields could feed directly into adaptive experimental setups that adjust forcing in response to measured flow features.
- Similar optimization steps might extend real-time dense imaging to other scalar or vector field measurements in fluids.
- High-rate dense data could reduce the total number of separate experiments needed to characterize unsteady flows.
Load-bearing premise
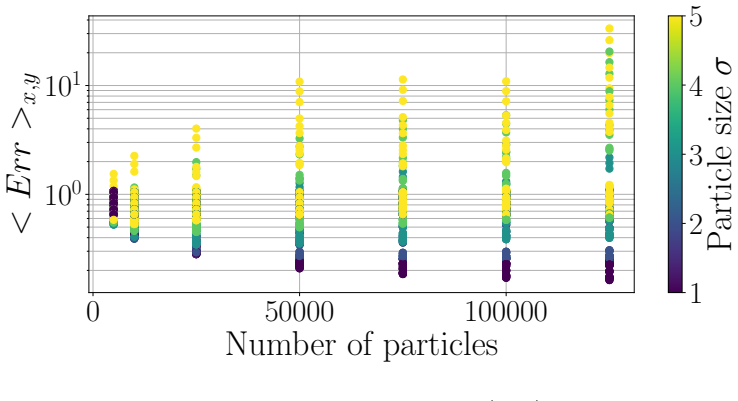
The resolution of small-scale displacement gradients depends on achieving suitable and sufficient particle seeding in the flow.
What would settle it
A well-seeded synthetic Rankine vortex test case that still fails to resolve known strong gradients at small scales would falsify the resolution performance claim.
Figures






















read the original abstract
Particle Image Velocimetry (PIV) typically relies on cross-correlation,which makes it difficult to obtain instantaneous velocity fields that are both spatially dense and available in real time at high acquisition rates. Optical Flow Velocimetry (OFV) offers a per-pixel alternative. Here we demonstrate real-tome OFV that delivers dense velocity fields (one vector per pixel) with high effective spatial resolution at frequencies up to the kHz range. Using synthetic particle images for two benchmarks -- a Rankine vortex and a homogeneous isotropic turbulence DNS -- we show that, with suitable particle seeding, OFV can resolve strong displacement gradients down to small scales. We then achieve real-time performance through algorithmic refinements and GPU-focused optimizations, combined with practical choices of OFV parameters. With this implementation, 32 Mp fields are processed live at 90 Hz, 4 Mp fields up to 460 Hz, and 1 Mp fields up to 1400 Hz. The method is further validated experimentally on the flow past a circular cylinder, where dense instantaneous velocity fields support real-time computation of derived quantities over long durations. These capabilities enable in-experiment monitoring, recovery of low-frequency dynamics from sustained high-rate acquisition, and closed-loop-flow-control strategies based on OFV measurements while also accelerating conventional post-processing to reduce turnaround time and computational cost.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an optimized real-time Optical Flow Velocimetry (OFV) implementation that produces dense, per-pixel velocity fields from particle images. It reports processing rates of 90 Hz for 32 Mp fields, 460 Hz for 4 Mp fields, and 1400 Hz for 1 Mp fields, achieved via algorithmic refinements and GPU optimizations. Validation is provided on synthetic benchmarks (Rankine vortex and homogeneous isotropic turbulence DNS) showing resolution of strong displacement gradients under suitable seeding, plus experimental demonstration on the wake of a circular cylinder enabling real-time computation of derived quantities.
Significance. If the reported performance and resolution hold under typical experimental conditions, the work would enable live high-speed dense velocimetry for in-experiment monitoring, recovery of low-frequency dynamics from sustained acquisition, and closed-loop flow control, while also accelerating post-processing relative to cross-correlation PIV. The explicit GPU-focused optimizations and concrete frame-rate numbers for different resolutions constitute a practical contribution.
major comments (1)
- [§3] §3 (synthetic benchmarks): The claim that OFV resolves strong displacement gradients down to small scales is demonstrated only at a single nominal seeding level for both the Rankine vortex and HIT DNS cases. No sensitivity study is reported that varies particle density, diameter, or out-of-plane motion while quantifying the smallest resolved scale or gradient error; this leaves the robustness of the high effective spatial resolution claim dependent on an unquantified 'suitable' seeding window.
minor comments (2)
- [Abstract] Abstract: 'real-tome' is a typographical error and should read 'real-time'.
- [Abstract] Abstract and validation sections: The central performance claims would be strengthened by inclusion of quantitative error bars, direct comparison tables against PIV or other OF methods, and full parameter settings for the reported benchmarks.
Simulated Author's Rebuttal
We thank the referee for their constructive comments on our manuscript. We address the major comment point by point below and indicate where revisions will be made to strengthen the work.
read point-by-point responses
-
Referee: [§3] §3 (synthetic benchmarks): The claim that OFV resolves strong displacement gradients down to small scales is demonstrated only at a single nominal seeding level for both the Rankine vortex and HIT DNS cases. No sensitivity study is reported that varies particle density, diameter, or out-of-plane motion while quantifying the smallest resolved scale or gradient error; this leaves the robustness of the high effective spatial resolution claim dependent on an unquantified 'suitable' seeding window.
Authors: We agree that the original presentation relied on a single nominal seeding level and that an explicit sensitivity study would better quantify the robustness of the high-resolution claim. In the revised manuscript we will add a new sensitivity analysis in §3 that systematically varies particle seeding density and diameter for both the Rankine vortex and HIT DNS cases. We will report the resulting changes in the smallest reliably resolved scale and in gradient error, thereby defining a practical 'suitable' seeding window. Out-of-plane motion is not varied in the synthetic benchmarks because those cases are strictly two-dimensional; however, the experimental cylinder-wake data already incorporate realistic out-of-plane effects, and the method continues to deliver usable fields. These additions will be presented without altering the reported real-time performance figures. revision: yes
Circularity Check
No significant circularity; claims rest on measured benchmarks and optimizations
full rationale
The paper reports measured real-time frame rates (32 Mp at 90 Hz, etc.) achieved via algorithmic refinements, GPU optimizations, and parameter choices, validated against synthetic Rankine vortex and HIT DNS cases plus cylinder experiments. These are external performance numbers tied to hardware and seeding conditions rather than any derivation that reduces by construction to fitted inputs, self-definitions, or self-citation chains. No equations or uniqueness theorems are invoked that loop back to the target results; the derivation chain is self-contained against the stated benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- OFV parameters
axioms (1)
- domain assumption Optical flow assumptions hold for suitably seeded particle images in fluid flows
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The optical flow algorithm used here relies on the brightness-constancy assumption... I_x u + I_y v + I_t = 0... Lucas-Kanade (LK) method... Gaussian-pyramid (coarse-to-fine) scheme
-
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
dense velocity fields (one vector per pixel) with high effective spatial resolution at frequencies up to the kHz range
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Real-Time Estimation of High-Resolution Flow Fields and Reduced-Order Coordinates from Event-Based Imaging Velocimetry
A framework uses offline-paired LR/HR data and POD latent-space linear models with Kalman filtering to reconstruct high-resolution velocity fields from coarse real-time event-based velocimetry, outperforming cubic int...
Reference graph
Works this paper leans on
-
[1]
imposes that neighboring pixels exhibit similar motion. To solve Eq. 1 an iterative min- imization by sum of squared differences is used. Algorithmically, the LK algorithm is a compromise between purely differential optical flow and window-based approaches: it uses a pixel-centered kernel, whose kernel radius (KR) sets the neighborhood over which intensit...
-
[2]
Local intensity normalization
-
[3]
Gaussian-pyramid subsampling (construction of coarse-to-fine levels)
-
[4]
Per-pixel displacement estimation at the kernel scale (LK with Gauss–Newton)
-
[5]
Upsampling and projection of the displacement to the next finer level
-
[6]
Iteration of steps 3–4 at each level until convergence
-
[7]
Final dense velocity-field computation at full resolution. FIG. 1: Diagram showing the main steps used to compute the velocity vectors at the kernel scale. The kernel-scale estimation is sketched in Fig. 1. Two subimages of size 12 ×12 px2 at times t and t′= t + δtare considered. In this example, two neighboring pixels at 6 (x,y ) = (6, 6) (red) and (7, 6...
work page 2023
- [8]
-
[9]
R. Theunissen, F. Scarano, and M. L. Riethmuller, An adaptive sampling and windowing interrogation method in piv, Measurement Science and Technology 18, 275 (2006)
work page 2006
-
[10]
F. Scarano and M. L. Riethmuller, Advances in iterative multigrid piv image processing, Experiments in fluids 29, S051 (2000)
work page 2000
- [11]
- [12]
-
[13]
A. Stitou and M. Riethmuller, Extension of piv to super resolution using ptv, Measurement Science and Technology 12, 1398 (2001)
work page 2001
-
[14]
M. Zhang and M. D. Piggott, Unsupervised learning of particle image velocimetry, in High Performance Computing: ISC High Performance 2020 International Workshops, Frankfurt, Germany, June 21–25, 2020, Revised Selected Papers 35 (Springer, 2020) pp. 102–115
work page 2020
-
[15]
J. S. Choi, E. S. Kim, and J. H. Seong, Deep learning-based spatial refinement method for robust high-resolution piv analysis, Experiments in Fluids 64, 45 (2023)
work page 2023
-
[16]
E. Ilg, N. Mayer, T. Saikia, M. Keuper, A. Dosovitskiy, and T. Brox, Flownet 2.0: Evolution of optical flow estimation with deep networks, inProceedings of the IEEE conference on computer vision and pattern recognition (2017) pp. 2462–2470
work page 2017
-
[17]
T. Maruyama, Y. Yamaguchi, and A. Kawase, An approach to real-time visualization of piv method with fpga, in International Conference on Field-Programmable Logic and Applications (2001)
work page 2001
-
[18]
T. Fujiwara, K. Fujimoto, and T. Maruyama, A real-time visualization system for piv, in International Conference on Field-Programmable Logic and Applications (2003)
work page 2003
- [19]
-
[20]
V. A. Shchapov, A. Pavlinov, E. N. Popova, A. Sukhanovskii, S. L. Kalyulin, and V. Y. Modor- 34 skii, Supercomputer real-time experimental data processing: Technology and applications, in Russian Supercomputing Days (2018)
work page 2018
-
[21]
C. E. Willert, M. Munson, and M. Gharib, Real-time particle image velocimetry for closed-loop flow control applications (2010)
work page 2010
-
[22]
F. McCormick, B. Gibeau, and S. Ghaemi, Reactive control of velocity fluctuations using an active deformable surface and real-time piv, Journal of Fluid Mechanics 985 (2024)
work page 2024
-
[23]
N. A. Piga, Y. Onyshchuk, G. Pasquale, U. Pattacini, and L. Natale, Roft: Real-time optical flow-aided 6d object pose and velocity tracking, IEEE Robotics and Automation Letters 7, 159 (2021)
work page 2021
-
[24]
Y. Wang, Z. Hou, K. Leman, and R. Chang, Real-time video stabilization for unmanned aerial vehicles, in IAPR International Workshop on Machine Vision Applications (2011)
work page 2011
-
[25]
A. Lim, B. Ramesh, Y. Yang, C. Xiang, Z. Gao, and F. Lin, Real-time optical flow-based video stabilization for unmanned aerial vehicles, Journal of Real-Time Image Processing 16, 1975 (2017)
work page 1975
-
[26]
V. Brebion, J. Moreau, and F. Davoine, Real-time optical flow for vehicular perception with low- and high-resolution event cameras, IEEE Transactions on Intelligent Transportation Sys- tems 23, 15066 (2021)
work page 2021
-
[27]
T. Romera, Ad´ equation algorithme architecture pour flot optique sur GPU embarqu´ e, Theses, Sorbonne Universit´ e (2023)
work page 2023
-
[28]
L. P. N. Mendes, A. M. Ricardo, A. J. M. Bernardino, and R. M. L. Ferreira, A comparative study of optical flow methods for fluid mechanics, Experiments in Fluids 63 (2021)
work page 2021
-
[29]
S. Cai, S. Zhou, C. Xu, and Q. Gao, Dense motion estimation of particle images via a convo- lutional neural network, Experiments in Fluids 60 (2019)
work page 2019
-
[30]
FlowNet: Learning Optical Flow with Convolutional Networks
P. Fischer, A. Dosovitskiy, E. Ilg, P. H¨ ausser, C. Hazırba¸ s, V. Golkov, P. van der Smagt, D. Cremers, and T. Brox, Flownet: Learning optical flow with convolutional networks (2015), arXiv:1504.06852 [cs.CV]
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[31]
C. Yu, Y. Fan, X. Bi, Y. fei Kuai, and Y. Chang, Deep dual recurrence optical flow learning for time-resolved particle image velocimetry, Physics of Fluids (2023)
work page 2023
-
[32]
Z. Teed and J. Deng, Raft: Recurrent all-pairs field transforms for optical flow, in European Conference on Computer Vision (2020)
work page 2020
- [33]
-
[34]
C. Lagemann, K. Lagemann, S. Mukherjee, and W. Schr¨ oder, Deep recurrent optical flow learning for particle image velocimetry data, Nature Machine Intelligence 3, 641 (2021)
work page 2021
-
[35]
C. Lagemann, K. Lagemann, S. Mukherjee, and W. Schroeder, Generalization of deep recur- rent optical flow estimation for particle-image velocimetry data, Measurement Science and Technology 33 (2022)
work page 2022
-
[36]
C. Lagemann, K. Lagemann, S. Mukherjee, and W. Schr¨ oder, Challenges of deep unsupervised optical flow estimation for particle-image velocimetry data, Experiments in Fluids (2024)
work page 2024
-
[37]
T. C. Redman, If your data is bad, your machine learning tools are useless, Harvard Business Review - Analytics and Data Science (2018)
work page 2018
-
[38]
N. Gautier and J. L. Aider, Real-time planar flow velocity measurements using an optical flow algorithm implemented on GPUs, Journal of Visualization 18, 277 (2015)
work page 2015
-
[39]
N. Gautier and J. L. Aider, Control of the separated flow downstream of a backward-facing step using visual feedback, Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 469 (2013)
work page 2013
-
[40]
N. Gautier and J. L. Aider, Frequency-lock reactive control of a separated flow enabled by visual sensors, Experiments in Fluids 56, 1 (2015)
work page 2015
- [41]
-
[42]
A. Giannopoulos and J.-L. Aider, Data-driven order reduction and velocity field reconstruction using neural networks: The case of a turbulent boundary layer, Physics of Fluids 32 (2020)
work page 2020
-
[43]
A. Giannopoulos, P.-Y. Passaggia, N. Mazellier, and J.-L. Aider, On the optimal window size in optical flow and cross-correlation in particle image velocimetry: application to turbulent flows, Experiments in Fluids 63, 57 (2022)
work page 2022
-
[44]
J. I. Cardesa, A. Vela-Mart´ ın, and J. Jim´ enez, The turbulent cascade in five dimensions, Science 357, 782 (2017)
work page 2017
-
[45]
B. D. Lucas and T. Kanade, An iterative image registration technique with an application to stereo vision, in International Joint Conference on Artificial Intelligence (1981)
work page 1981
-
[46]
A. Giannopoulos, Optical Flow Velocimetry : optimization, benchmarking and application to system identification, modelling and control of shear flows , Theses, Sorbonne Universit´ e (2021). 36
work page 2021
-
[47]
Pimienta Alvernia, High frequency and high resolution Live Optical Flow velocimetry
J. Pimienta Alvernia, High frequency and high resolution Live Optical Flow velocimetry. Ap- plication to the monitoring and control of fluid flows. , Theses, Universit´ e Paris sciences et lettres (2024)
work page 2024
- [48]
-
[49]
S. Beresh, The influence of velocity gradients on PIV measurements of turbulence statistics: A preliminary study, 26th AIAA Aerodynamic Measurement Technology and Ground Testing Conference (2008), https://arc.aiaa.org/doi/pdf/10.2514/6.2008-3710
-
[50]
J. Westerweel, On velocity gradients in PIV interrogation, Exp Fluids 44, 831–842 https://doi.org/10.1007/s00348-007-0439-3 (2008)
-
[51]
J. J. Gibson, The senses considered as perceptual systems (1967)
work page 1967
-
[52]
J. J. Gibson, The ecological approach to visual perception (1979)
work page 1979
-
[53]
J. J. Gibson, The perception of th visual world (Houghton Mifflin, 1950)
work page 1950
-
[54]
J. J. Gibson, A theory of direct visual perception (2002)
work page 2002
-
[55]
M. Andalibi, L. Hoberock, and H. Mohamadipanah, Effects of texture addition on optical flow performance in images with poor texture, Image and Vision Computing 40, 1 (2015)
work page 2015
-
[56]
W. Thielicke and R. Sonntag, Particle image velocimetry for MATLAB: Accuracy and en- hanced algorithms in PIVlab, Journal of Open Research Software 9, 12 (2021)
work page 2021
-
[57]
J. Saif, M. H. Hammad, and I. A. A. Alqubati, Gradient based image edge detection, Inter- national journal of engineering and technology 8, 153 (2016)
work page 2016
-
[58]
J. Aguilar-Cabello, L. Parras, and C. del Pino, Dpivsoft-opencl: A multicore cpu-gpu accel- erated open-source code for 2d particle image velocimetry, SoftwareX 20, 101256 (2022). 37
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.