Dynamic Drawing Guidance via Electromagnetic Haptic Feedback
Pith reviewed 2026-05-25 14:38 UTC · model grok-4.3
The pith
An electromagnet moving under a tablet delivers real-time haptic guidance that keeps drawing errors to 2.8 mm while letting users retain full control of pace and style.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is that a novel approximate model of the electromagnet, combined with a receding-horizon optimal-control formulation, enables closed-loop haptic feedback that corrects drawing trajectories in real time. This approach produces a measured dispersion of 2.8 mm (+/-0.8 mm) and demonstrably raises user accuracy on shapes of varying complexity.
What carries the argument
The receding-horizon optimal control loop that repeatedly measures pen position and solves for the next magnet state using the fast approximate electromagnet model.
If this is right
- The guidance remains effective even when the user draws at an arbitrary speed or pauses.
- Accuracy improvement scales with task difficulty, offering more help on intricate curves.
- The closed-loop nature produces corrective pulls back to the path rather than forcing the pen forward.
- Real-time performance is sustained because the approximate model runs fast enough for iterative optimization.
Where Pith is reading between the lines
- Similar electromagnetic setups could be adapted to guide other manual tasks such as handwriting practice or surgical tool positioning.
- Combining the haptic signal with visual overlays on the tablet might further amplify learning effects for novices.
- The low dispersion suggests the method could support fine motor rehabilitation if the target trajectories are adjusted dynamically.
Load-bearing premise
The approximate electromagnet model must remain accurate enough during live operation to keep the closed-loop controller stable and effective.
What would settle it
Running the system on a new electromagnet or tablet where the model's force predictions deviate by more than a few percent from measured forces, causing the pen to drift beyond the reported 2.8 mm dispersion.
Figures















read the original abstract
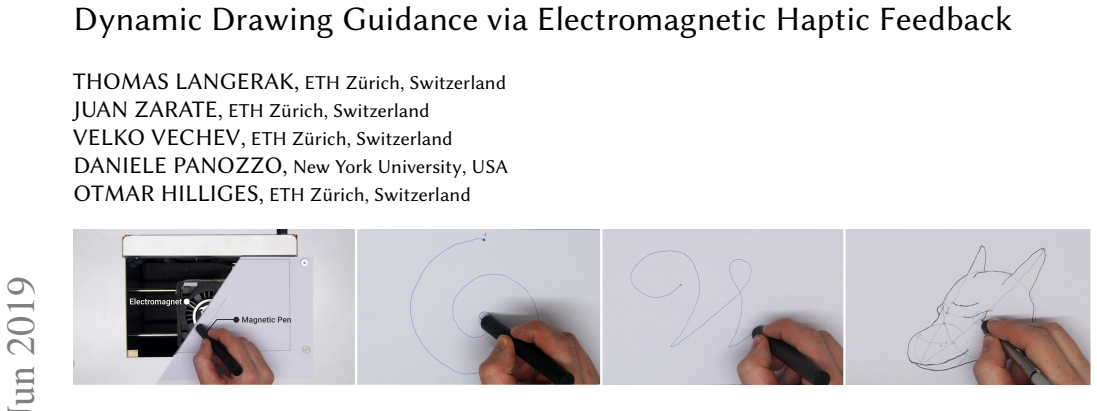
We propose a system to deliver dynamic guidance in drawing, sketching and handwriting tasks via an electromagnet moving underneath a high refresh rate pressure sensitive tablet. The system allows the user to move the pen at their own pace and style and does not take away control. The system continously and iteratively measures the pen motion and adjusts magnet position and power according to the user input in real-time via a receding horizon optimal control formulation. The optimization is based on a novel approximate electromagnet model that is fast enough for use in real-time methods, yet provides very good fit to experimental data. Using a closed-loop time-free approach allows for error-correcting behavior, gently pulling the user back to the desired trajectory rather than pushing or pulling the pen to a continuously advancing setpoint. Our experimental results show that the system can control the pen position with a very low dispersion of 2.8mm (+/-0.8mm). An initial user study indicates that it significantly increases accuracy of users drawing a variety of shapes and that this improvement increases with complexity of the shape.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents an electromagnetic haptic guidance system for drawing, sketching, and handwriting tasks. An electromagnet beneath a high-refresh-rate pressure-sensitive tablet is positioned and powered in real time via a receding-horizon optimal controller that uses a novel fast approximate electromagnet model. The approach is time-free and closed-loop, allowing users to proceed at their own pace while the system gently corrects trajectory errors. Experiments report a pen-position dispersion of 2.8 mm (±0.8 mm) under closed-loop control; an initial user study finds statistically significant accuracy gains that increase with shape complexity.
Significance. If the empirical claims hold, the work offers a practical contribution to HCI by demonstrating a non-intrusive, user-controlled haptic assistance method whose performance scales with task difficulty. The direct experimental measurement of dispersion and the user-study accuracy metrics provide independent support for the central performance claims, independent of any modeling circularity.
major comments (2)
- [Abstract / model description] The abstract states that the approximate electromagnet model 'provides very good fit to experimental data' and is 'fast enough for use in real-time methods,' yet no quantitative fit metrics (e.g., RMSE, R²) or timing benchmarks appear in the provided summary; these numbers are load-bearing for the claim that the receding-horizon controller can run closed-loop at tablet rates.
- [User study results] The user-study claim that 'improvement increases with complexity of the shape' requires the specific statistical test, effect sizes, and per-shape accuracy tables to be examined; without them it is unclear whether the interaction effect is robust or driven by a small number of complex shapes.
minor comments (2)
- [Control formulation] Clarify the exact formulation of the time-free cost function in the receding-horizon controller (e.g., how the reference trajectory is encoded without an explicit time index).
- [Experimental results] The reported dispersion of 2.8 mm (±0.8 mm) should be accompanied by the number of trials, the exact definition of 'dispersion' (e.g., RMS error or maximum deviation), and the baseline open-loop condition for comparison.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the recommendation of minor revision. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract / model description] The abstract states that the approximate electromagnet model 'provides very good fit to experimental data' and is 'fast enough for use in real-time methods,' yet no quantitative fit metrics (e.g., RMSE, R²) or timing benchmarks appear in the provided summary; these numbers are load-bearing for the claim that the receding-horizon controller can run closed-loop at tablet rates.
Authors: The model validation, including quantitative fit metrics and timing benchmarks, is reported in the body of the manuscript (Section 4). To ensure the abstract is self-contained and the real-time claim is immediately verifiable, we will revise the abstract to include a concise reference to these metrics. revision: yes
-
Referee: [User study results] The user-study claim that 'improvement increases with complexity of the shape' requires the specific statistical test, effect sizes, and per-shape accuracy tables to be examined; without them it is unclear whether the interaction effect is robust or driven by a small number of complex shapes.
Authors: The manuscript presents the user-study analysis, including the interaction test and per-shape data, in Section 5. We will revise to make the statistical details, effect sizes, and tables more explicitly referenced in the results summary so that the robustness of the complexity interaction is clear without requiring the reader to locate the full section. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's central claims (2.8 mm pen dispersion under closed-loop control and accuracy gains in the user study) are established via direct experimental measurement of physical outcomes and participant performance, rather than any quantity defined circularly in terms of the electromagnet model's fitted parameters or receding-horizon optimization. The approximate model is described as enabling real-time control, but the reported dispersion and study results provide independent empirical support outside the model's internal equations. No load-bearing derivation step reduces by construction to a self-definition, fitted input renamed as prediction, or self-citation chain.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In Proceedings of the 17th annual ACM symposium on User interface software and technology
Haptic pen: a tactile feedback stylus for touch screens. In Proceedings of the 17th annual ACM symposium on User interface software and technology . ACM, 291–294. Yong Jae Lee, C Lawrence Zitnick, and Michael F Cohen. 2011. Shadowdraw: real-time user guidance for freehand drawing. InACM Transactions on Graphics (TOG), Vol. 30. ACM, 27. Alex Limpaecher, Ni...
-
[2]
We use a hall sensor (Allegro A1324, sensitivity is 5 mV/G)2 to measure the z-magnetic flux at a fix heighthm, where the magnet of the pen would be. Setting the electromagnet toα= 1 and moving it in a grid we attain multiple readings of the hall sensor for different electromagnet positions pm. We present the obtained magnetic field plotted in Figure 18, t...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.