Tracking-ADMM for Distributed Constraint-Coupled Optimization
Pith reviewed 2026-05-24 16:29 UTC · model grok-4.3
The pith
Embedding dynamic consensus tracking into parallel ADMM lets networked agents solve shared-constraint optimization problems in a fully distributed manner.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Under convexity, all limit points of the agents' primal solution estimates form an optimal solution of the constraint-coupled problem. The proof proceeds by Lyapunov analysis that simultaneously establishes consensus of the dual estimates to a dual optimal solution, convergence of the tracking scheme, and asymptotic optimality of the primal iterates.
What carries the argument
Dynamic average consensus protocol that tracks the time-varying aggregate coupling-constraint violation, enabling each agent to perform a local dual update that mimics the centralized parallel ADMM step.
If this is right
- All limit points of the primal iterates are optimal for the original problem.
- Dual estimates reach consensus at a dual optimal solution.
- The tracking error on the constraint violation converges to zero.
- The scheme applies directly to coordination problems such as plug-in electric vehicle charging schedules.
Where Pith is reading between the lines
- If the tracking error remains bounded under mild communication imperfections, the method could tolerate packet losses or delays.
- The same tracking idea might be grafted onto other first-order distributed methods that require global sums.
- Asynchronous or directed-graph versions would require only a modified consensus protocol while preserving the Lyapunov structure.
Load-bearing premise
The dynamic average consensus protocol can accurately track the time-varying coupling-constraint violation generated by the evolving primal iterates.
What would settle it
Run the algorithm on a small convex test problem whose optimal value is known exactly and check whether every agent's primal estimate converges to that known optimum.
Figures

read the original abstract
We consider constraint-coupled optimization problems in which agents of a network aim to cooperatively minimize the sum of local objective functions subject to individual constraints and a common linear coupling constraint. We propose a novel optimization algorithm that embeds a dynamic average consensus protocol in the parallel Alternating Direction Method of Multipliers (ADMM) to design a fully distributed scheme for the considered set-up. The dynamic average mechanism allows agents to track the time-varying coupling constraint violation (at the current solution estimates). The tracked version of the constraint violation is then used to update local dual variables in a consensus-based scheme mimicking a parallel ADMM step. Under convexity, we prove that all limit points of the agents' primal solution estimates form an optimal solution of the constraint-coupled (primal) problem. The result is proved by means of a Lyapunov-based analysis simultaneously showing consensus of the dual estimates to a dual optimal solution, convergence of the tracking scheme and asymptotic optimality of primal iterates. A numerical study on optimal charging schedule of plug-in electric vehicles corroborates the theoretical results.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Tracking-ADMM, a fully distributed algorithm for constraint-coupled convex optimization over networks. It embeds a dynamic average consensus protocol into parallel ADMM so that each agent tracks the time-varying aggregate constraint violation generated by the evolving primal iterates and uses the tracked quantity to perform a local dual update that mimics the centralized parallel ADMM step. Under convexity, a Lyapunov argument is claimed to establish simultaneously (i) consensus of the dual estimates to a dual optimum, (ii) convergence of the tracking scheme, and (iii) that every limit point of the primal iterates is a primal optimum. The theoretical claims are illustrated by a numerical study on optimal charging schedules for plug-in electric vehicles.
Significance. If the Lyapunov analysis is rigorous, the result supplies a practical, fully distributed method for a class of problems that arise in smart-grid, sensor-network, and multi-agent coordination settings. The simultaneous treatment of tracking, dual consensus, and primal optimality within a single Lyapunov function is a technical strength, as is the absence of free parameters or ad-hoc tuning in the stated convergence statement. The numerical example on EV charging provides concrete corroboration of the claimed behavior.
minor comments (3)
- [Abstract / Problem statement] The abstract states that the result holds “under convexity” but does not list the precise standing assumptions on the communication graph (connectedness, undirectedness, or time-invariance). These conditions are load-bearing for the dynamic-average-consensus tracking property and should be stated explicitly in the problem formulation section.
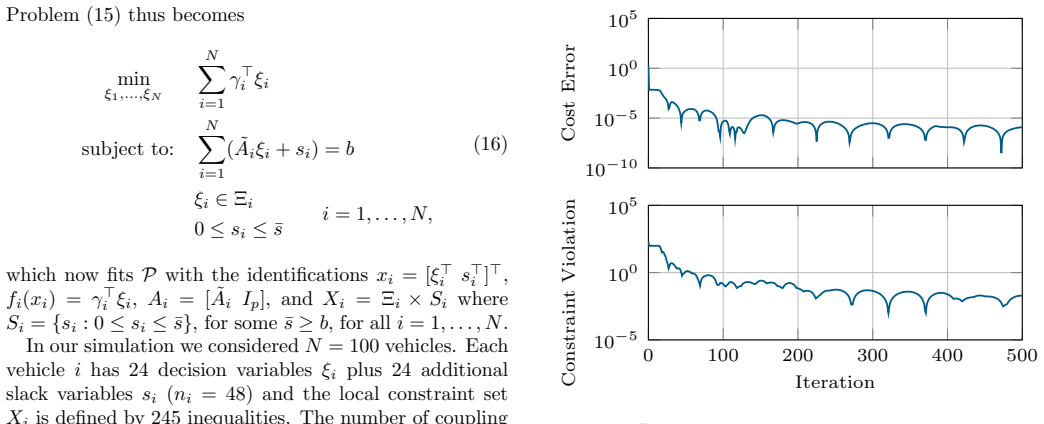
- [Numerical study] The numerical study reports convergence behavior but does not specify the network size, the exact communication topology used, or any quantitative comparison against existing distributed ADMM variants. Adding these details would make the experimental validation more informative.
- [Algorithm description] Notation for the tracked constraint violation and the local dual variables should be introduced with a single consistent symbol table or list of definitions before the algorithm is presented.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation of minor revision. The referee's description accurately captures the Tracking-ADMM algorithm, its embedding of dynamic average consensus, and the Lyapunov-based convergence claims.
Circularity Check
No significant circularity detected
full rationale
The paper introduces a distributed Tracking-ADMM algorithm that embeds dynamic average consensus into parallel ADMM for constraint-coupled problems. The central result is a Lyapunov-based convergence proof under convexity that simultaneously establishes dual consensus, tracking convergence, and primal optimality. No self-citations, fitted parameters renamed as predictions, self-definitional reductions, or ansatzes smuggled via prior work appear in the derivation chain as described. The proof is presented as an independent technical argument relying on standard Lyapunov techniques and the algorithm's explicit construction, rendering the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Local objective functions are convex
Reference graph
Works this paper leans on
-
[1]
B. Johansson, T. Keviczky, M. Johansson, K. H. Johansson, Subgradient methods and consensus algorithms for solving con- vex optimization problems, in: IEEE Conference on Decision and Control (CDC), 2008, pp. 4185–4190
work page 2008
-
[2]
A. Nedi´ c, A. Ozdaglar, Distributed subgradient methods for multi-agent optimization, IEEE Trans. on Automatic Control 54 (1) (2009) 48–61
work page 2009
-
[3]
A. Nedi´ c, A. Ozdaglar, P. A. Parrilo, Constrained consensus and optimization in multi-agent networks, IEEE Trans. on Au- tomatic Control 55 (4)
-
[4]
F. Zanella, D. Varagnolo, A. Cenedese, G. Pillonetto, L. Schen- ato, Newton-Raphson consensus for distributed convex opti- mization, in: IEEE Conference on Decision and Control and Eu- ropean Control Conference (CDC-ECC), 2011, pp. 5917–5922
work page 2011
-
[5]
D. Jakoveti´ c, J. Xavier, J. M. Moura, Fast distributed gradi- ent methods, IEEE Transactions on Automatic Control 59 (5) (2014) 1131–1146. 8
work page 2014
-
[6]
W. Shi, Q. Ling, G. Wu, W. Yin, Extra: An exact first-order algorithm for decentralized consensus optimization, SIAM Jour- nal on Optimization 25 (2) (2015) 944–966
work page 2015
-
[7]
A. Nedi´ c, A. Olshevsky, Distributed optimization over time- varying directed graphs, IEEE Transactions on Automatic Con- trol 60 (3) (2015) 601–615
work page 2015
-
[8]
K. Margellos, A. Falsone, S. Garatti, M. Prandini, Distributed constrained optimization and consensus in uncertain networks via proximal minimization, IEEE Transactions on Automatic Control 63 (5) (2018) 1372–1387
work page 2018
-
[9]
J. C. Duchi, A. Agarwal, M. J. Wainwright, Dual averaging for distributed optimization: Convergence analysis and network scaling, IEEE Trans. on Autom. Control 57 (3) (2012) 592–606
work page 2012
-
[10]
M. Zhu, S. Mart´ ınez, On distributed convex optimization un- der inequality and equality constraints, IEEE Transactions on Automatic Control 57 (1) (2012) 151–164
work page 2012
-
[11]
J. F. Mota, J. M. Xavier, P. M. Aguiar, M. P¨ uschel, D-ADMM: A communication-efficient distributed algorithm for separable optimization, IEEE Trans. on Signal Processing 61 (10) (2013) 2718–2723
work page 2013
-
[12]
Q. Ling, A. Ribeiro, Decentralized dynamic optimization through the alternating direction method of multipliers, IEEE Trans. on Signal Processing 5 (62) (2014) 1185–1197
work page 2014
-
[13]
W. Shi, Q. Ling, K. Yuan, G. Wu, W. Yin, On the linear con- vergence of the ADMM in decentralized consensus optimization, IEEE Trans. on Signal Processing 62 (7) (2014) 1750–1761
work page 2014
-
[14]
D. Jakoveti´ c, J. M. Moura, J. M. Xavier, Linear convergence rate of a class of distributed augmented Lagrangian algorithms, IEEE Trans. on Automatic Control 60 (4) (2015) 922–936
work page 2015
-
[15]
F. Iutzeler, P. Bianchi, P. Ciblat, W. Hachem, Explicit con- vergence rate of a distributed alternating direction method of multipliers, IEEE Trans. on Autom. Control 61 (4) (2016) 892– 904
work page 2016
-
[16]
A. Makhdoumi, A. Ozdaglar, Convergence rate of distributed ADMM over networks, IEEE Trans. on Automatic Control 62 (10) (2017) 5082–5095
work page 2017
-
[17]
D. P. Bertsekas, J. N. Tsitsiklis, Parallel and distributed com- putation: numerical methods, Vol. 23, Prentice hall Englewood Cliffs, NJ, 1989
work page 1989
-
[18]
S. Boyd, N. Parikh, E. Chu, B. Peleato, J. Eckstein, Distributed optimization and statistical learning via the alternating direc- tion method of multipliers, Found. and Trends R⃝ in Machine learning 3 (1) (2011) 1–122
work page 2011
-
[19]
M. Zhu, S. Mart´ ınez, Discrete-time dynamic average consensus, Automatica 46 (2) (2010) 322–329
work page 2010
-
[20]
S. S. Kia, B. Van Scoy, J. Cortes, R. A. Freeman, K. M. Lynch, S. Martinez, Tutorial on dynamic average consensus: The prob- lem, its applications, and the algorithms, IEEE Control Systems Magazine 39 (3) (2019) 40–72
work page 2019
-
[21]
P. Di Lorenzo, G. Scutari, NEXT: In-network nonconvex opti- mization, IEEE Trans. on Signal and Information Process. over Networks 2 (2) (2016) 120–136
work page 2016
-
[22]
D. Varagnolo, F. Zanella, A. Cenedese, G. Pillonetto, L. Schen- ato, Newton-Raphson consensus for distributed convex opti- mization, IEEE Trans. on Automatic Control 61 (4) (2016) 994– 1009
work page 2016
-
[23]
A. Nedi´ c, A. Olshevsky, W. Shi, Achieving geometric conver- gence for distributed optimization over time-varying graphs, SIAM J. on Optimization 27 (4) (2017) 2597–2633
work page 2017
-
[24]
G. Qu, N. Li, Harnessing smoothness to accelerate distributed optimization, IEEE Trans. on Control of Network Systems 5 (3) (2018) 1245–1260
work page 2018
-
[25]
J. Xu, S. Zhu, Y. C. Soh, L. Xie, Convergence of asynchronous distributed gradient methods over stochastic networks, IEEE Trans. on Autom. Control 63 (2) (2018) 434–448
work page 2018
-
[26]
C. Xi, R. Xin, U. A. Khan, ADD-OPT: Accelerated distributed directed optimization, IEEE Trans. on Autom. Control 63 (5) (2018) 1329–1339
work page 2018
-
[27]
I. Necoara, V. Nedelcu, On linear convergence of a distributed dual gradient algorithm for linearly constrained separable con- vex problems, Automatica 55 (2015) 209–216
work page 2015
-
[28]
S. Alghunaim, K. Yuan, A. Sayed, Dual coupled diffusion for distributed optimization with affine constraints, in: IEEE Con- ference on Decision and Control (CDC), 2018, pp. 829–834
work page 2018
- [29]
-
[30]
D. Mateos-N´ unez, J. Cort´ es, Distributed saddle-point subgra- dient algorithms with Laplacian averaging, IEEE Transactions on Automatic Control 62 (6) (2017) 2720–2735
work page 2017
-
[31]
A. Simonetto, H. Jamali-Rad, Primal recovery from consensus- based dual decomposition for distributed convex optimization, Journal of Optimization Theory and Applications 168 (1) (2016) 172–197
work page 2016
-
[32]
A. Falsone, K. Margellos, S. Garatti, M. Prandini, Dual decom- position for multi-agent distributed optimization with coupling constraints, Automatica 84 (2017) 149–158
work page 2017
-
[33]
Chang, A proximal dual consensus ADMM method for multi-agent constrained optimization, IEEE Trans
T.-H. Chang, A proximal dual consensus ADMM method for multi-agent constrained optimization, IEEE Trans. on Signal Processing 64 (14) (2016) 3719–3734
work page 2016
-
[34]
Constraint Coupled Distributed Optimization: a Relaxation and Duality Approach
I. Notarnicola, G. Notarstefano, Constraint coupled distributed optimization: a relaxation and duality approach, preprint arXiv:1711.09221
work page internal anchor Pith review Pith/arXiv arXiv
-
[35]
S. S. Kia, Distributed optimal in-network resource allocation algorithm design via a control theoretic approach, Systems & Control Letters 107 (2017) 49–57
work page 2017
- [36]
-
[37]
R. Vujanic, P. M. Esfahani, P. J. Goulart, S. Mari´ ethoz, M. Morari, A decomposition method for large scale MILPs, with performance guarantees and a power system application, Auto- matica 67 (2016) 144–156. Appendix A. Proofs Proof of Lemma 1 We prove (8) by induction. For k = 0, given the initial- ization in Step 3, we have that ¯d0 = 1 N N∑ i=1 di,0 = ...
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.