Dual Representations and H_(infty)-Optimal Control of Partial Differential Equations
Pith reviewed 2026-05-24 10:56 UTC · model grok-4.3
The pith
Any linear PDE admitting a partial integral equation representation also admits a dual representation preserving stability and input-output maps.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Any PDE system represented by a PIE admits a dual PIE with identical stability and I/O properties. This result allows reformulation of the stabilizing and optimal state-feedback control problems as convex optimization over the cone of positive Partial Integral (PI) operators. Operator inversion formulae then allow construction of feedback gains for the original PDE system.
What carries the argument
The dual PIE representation, obtained from the original PIE while preserving the stability and input-output operator of the underlying PDE system.
If this is right
- Stabilizing state-feedback controllers for any PIE-representable PDE can be found by solving a convex optimization problem over positive PI operators.
- H-infinity optimal state-feedback synthesis for these PDEs reduces to a convex program whose solution gives the exact optimal performance.
- The optimal feedback operator for the original PDE is recovered from the solution of the dual problem by applying the given inversion formulas.
- The resulting H-infinity performance bounds are tight on the canonical PDE examples considered in the paper.
Where Pith is reading between the lines
- The same dual construction could be used to obtain convex programs for other convex performance measures such as H2 or LQR control.
- Observer or output-feedback problems might become convex if analogous dual representations are derived for those settings.
- Practical computation would require finite-dimensional approximations of the positive PI operators that preserve the positivity constraint.
Load-bearing premise
The duality that maps any PIE to a dual PIE while exactly preserving stability and input-output maps holds for all linear PDEs that admit a PIE representation.
What would settle it
A specific linear PDE whose PIE dual yields a controller that fails to stabilize the original PDE or produces an H-infinity bound strictly larger than the true closed-loop norm.
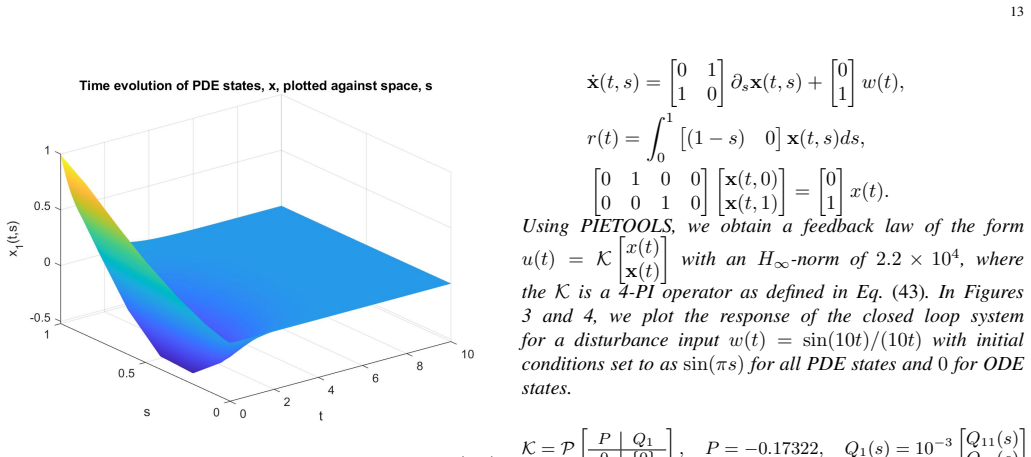
Figures



read the original abstract
We consider $\hinf$-optimal state-feedback control of the class of linear Partial Differential Equations (PDEs) which admit a Partial Integral Equation (PIE) representation. While linear matrix inequalities are commonly used for optimal control of Ordinary Differential Equations (ODEs), the absence of a universal state-space representation and suitable dual form prevents such methods from being applied to optimal control of PDEs. Specifically, for ODEs, the controller synthesis problem is defined in state-space, and duality is used to resolve the bilinearity of that synthesis problem. Recently, the PIE representation was proposed as a universal state-space representation for linear PDE systems. In this paper, we show that any PDE system represented by a PIE admits a dual PIE with identical stability and I/O properties. This result allows us to reformulate the stabilizing and optimal state-feedback control problems as convex optimization over the cone of positive Partial Integral (PI) operators. Operator inversion formulae then allow us to construct feedback gains for the original PDE system. The results are verified through application to several canonical problems in optimal control of PDEs and indicate the resulting bounds on $\hinf$ norm are not conservative.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that any linear PDE admitting a Partial Integral Equation (PIE) representation also admits a dual PIE with identical stability and input-output properties. This duality is used to recast the H∞-optimal state-feedback synthesis problem as a convex optimization over the cone of positive Partial Integral operators; operator inversion formulae then recover the feedback gains for the original PDE. The method is demonstrated on several canonical PDE control examples, with the resulting H∞ bounds reported to be non-conservative.
Significance. If the duality construction is correct, the work supplies a systematic, convex route to H∞ synthesis for a broad class of linear PDEs via the PIE framework, extending finite-dimensional LMI techniques without introducing conservatism on the tested examples. The explicit dual construction and inversion step are technically enabling and constitute a clear advance over existing ad-hoc approaches to PDE control.
major comments (2)
- [Theorem 3.2] Theorem 3.2 (duality mapping): the proof that the dual PIE preserves the input-output map relies on an adjoint construction whose domain is stated to coincide with the original; however, the argument does not explicitly verify that the resulting dual operator remains a well-defined PI operator when the original system includes non-local or distributed boundary terms (as appear in Example 5.3).
- [Section 4.3, Eq. (28)] Section 4.3, Eq. (28): the LMI for the H∞ performance bound is formulated over positive PI operators, yet the manuscript does not provide an a-priori guarantee that the feasible set is non-empty for every stabilizable PIE; the numerical success on the examples therefore leaves open whether the method is complete for the full class.
minor comments (3)
- [Definition 2.4] The notation for the partial-integral operator cone (Definition 2.4) is introduced without an explicit link to the positivity certificate used later in the SDP; adding a short remark would improve readability.
- [Table 1] Table 1 lists computed H∞ bounds but omits the corresponding controller degrees or the dimension of the decision variables; these data would help readers assess computational cost.
- [Abstract] The abstract states that the bounds are 'not conservative,' yet the comparison is only to the open-loop norm; a brief sentence contrasting with known analytical optima (where available) would strengthen the claim.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and constructive comments, which help clarify the scope of the duality result and the LMI formulation. We address each major comment below.
read point-by-point responses
-
Referee: [Theorem 3.2] Theorem 3.2 (duality mapping): the proof that the dual PIE preserves the input-output map relies on an adjoint construction whose domain is stated to coincide with the original; however, the argument does not explicitly verify that the resulting dual operator remains a well-defined PI operator when the original system includes non-local or distributed boundary terms (as appear in Example 5.3).
Authors: We appreciate the referee highlighting this point. Theorem 3.2 constructs the dual via the adjoint operator and states that domains coincide under the PIE representation. To address cases with non-local or distributed boundary terms (as in Example 5.3), we will augment the proof with an explicit verification that the dual coefficients remain well-defined Partial Integral operators, including a supporting calculation for the general boundary term structure. This will be included in the revised manuscript. revision: yes
-
Referee: [Section 4.3, Eq. (28)] Section 4.3, Eq. (28): the LMI for the H∞ performance bound is formulated over positive PI operators, yet the manuscript does not provide an a-priori guarantee that the feasible set is non-empty for every stabilizable PIE; the numerical success on the examples therefore leaves open whether the method is complete for the full class.
Authors: The referee is correct that the manuscript provides no a-priori guarantee of non-emptiness of the feasible set for every stabilizable PIE. The LMI yields a convex sufficient condition for an H∞ bound, with the examples showing the bounds are tight. Proving that the positive PI cone is sufficiently rich to ensure feasibility for all stabilizable systems would require additional density or completeness results and is left for future work. We will revise Section 4.3 to state this limitation explicitly and clarify the sufficient (rather than necessary-and-sufficient) nature of the condition. revision: yes
Circularity Check
No significant circularity in duality-based reformulation
full rationale
The paper's central step is proving existence of a dual PIE representation that preserves stability and I/O maps for any PIE-representable linear PDE, then using that to convert state-feedback synthesis into convex optimization over the cone of positive PI operators followed by operator inversion to recover gains. This mirrors standard LMI duality arguments without reducing any claimed prediction or bound to a fitted parameter or self-citation by construction. No self-definitional, fitted-input, or load-bearing self-citation patterns appear in the stated claims; the duality result is presented as an independent theorem enabling the convex reformulation rather than presupposing the target controller or performance bound.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Linear PDEs that admit a PIE representation also admit a dual PIE preserving stability and input-output maps.
- domain assumption Convex optimization over the cone of positive partial integral operators yields stabilizing and H∞-optimal feedback gains via operator inversion.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
any PDE system represented by a PIE admits a dual PIE with identical stability and I/O properties... reformulate ... as convex optimization over the cone of positive Partial Integral (PI) operators
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Dual Stability Theorem... Dual L2-gain Theorem
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 2 Pith papers
-
$H_2$-Optimal Estimation of Linear Delayed and PDE Systems
A convex LPI optimization framework for H2-optimal observer synthesis in linear PDE and delay systems via PIE state-space representations.
-
Static Output Feedback Stabilization of Linear Systems with Multiple Delays
Extends a convex optimization approach for static output feedback stabilization from ODEs to linear time-delay systems by solving two LMI problems using an extended Projection Lemma on partial integral operators.
Reference graph
Works this paper leans on
-
[1]
P. Apkarian and D. Noll. Boundary control of partial differential equations using frequency domain optimization techniques. Systems & Control Letters, 135:104577, 2020
work page 2020
-
[2]
S. Boyd, L. El Ghaoui, E. Feron, and V . Balakrishnan. Linear matrix inequalities in system and control theory , volume 15. SIAM, 1994
work page 1994
-
[3]
S. S. Collis and M. Heinkenschloss. Analysis of the streamline upwind/Petrov-Galerkin method applied to the solution of optimal control problems. CAAM TR02-01, 108, 2002
work page 2002
-
[4]
R. F. Curtain and H. J. Zwart. An Introduction to Infinite-dimensional Linear Systems Theory . Springer-Verlag New York, 1995
work page 1995
-
[5]
A. Das, S. Shivakumar, S. Weiland, and M. Peet. H∞ optimal estimation for linear coupled PDE systems. In Proceedings of the IEEE Conference on Decision and Control , 2019
work page 2019
-
[6]
I. M. Gel ´fand and G. E. Shilov. Generalized functions. AMS Chelsea Publishing, 3, 1976
work page 1976
-
[7]
I. Gohberg, S. Goldberg, and M. A. Kaashoek. Classes of linear operators Vol. I, volume 63. Birkh ¨auser, 2013
work page 2013
- [8]
- [9]
-
[10]
I. Karafyllis and M. Krstic. Input-to-state stability for PDEs . Springer, 2019
work page 2019
-
[11]
M. Krstic and A. Smyshlyaev. Boundary control of PDEs: A course on backstepping designs, volume 16. SIAM, 2008
work page 2008
-
[12]
K. Lenz, H. Ozbay, A. Tannenbaum, J. Turi, and B. Morton. Robust control design for a flexible beam using a distributed-parameter H∞- method. In Proceedings of the IEEE Conference on Decision and Control, pages 2673–2678, 1989
work page 1989
-
[13]
M. Peet. A dual to Lyapunov’s second method for linear systems with multiple delays and implementation using SOS. IEEE Transactions on Automatic Control, 64(3):944 – 959, 2019
work page 2019
-
[14]
M. Peet. A convex solution of the H∞-optimal controller synthesis problem for multidelay systems. SIAM Journal on Control and Opti- mization, 58(3):1547–1578, 2020
work page 2020
-
[15]
M. Peet. A partial integral equation (PIE) representation of coupled linear PDEs and scalable stability analysis using LMIs. Automatica, 125:109473, 2021
work page 2021
-
[16]
S. Shivakumar, A. Das, S. Weiland, and M. Peet. Duality and H∞- optimal control of coupled ODE-PDE systems. pages 5689–5696, 2020
work page 2020
-
[17]
S. Shivakumar, A. Das, S. Weiland, and M. Peet. Extension of the partial integral equation representation to GPDE input-output systems. arXiv preprint arXiv:2205.03735, 2022
-
[18]
S. Shivakumar, D. Jagt, and M. Peet. PIETOOLS. https://github.com/CyberneticSCL/PIETOOLS, 2019
work page 2019
-
[19]
S. Shivakumar and M. Peet. Computing input-ouput properties of coupled linear PDE systems. In American Control Conference , pages 606–613. IEEE, 2019
work page 2019
-
[20]
O. Toker and H. Ozbay. H∞-optimal and suboptimal controllers for infinite dimensional SISO plants. IEEE Transactions on Automatic Control, 40(4):751–755, 1995
work page 1995
-
[21]
A. Zemouche, R. Rajamani, B. Boulkroune, H. Rafaralahy, and M. Za- sadzinski. H∞ circle criterion observer design for lipschitz nonlinear systems with enhanced LMI conditions. In American Control Confer- ence, pages 131–136. IEEE, 2016. 15 FORMULAE TO CONVERT ODE-PDE TO A PIE nx = N∑ i=0 ni, n Si := N∑ j=i nj nS = N∑ i=1 nSi ni:j := j∑ k=i nk, Ti,j(s) = s...
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.