Information Aided Navigation: A Review
Pith reviewed 2026-05-24 10:07 UTC · model grok-4.3
The pith
Matching the right information constraint to a navigation scenario improves accuracy, replaces lost measurements, and makes hidden states observable.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that information aided navigation can be broadly classified into direct, indirect, and model aiding. For each category, it reviews notable implementations, use cases, relevant state updates, and measurement models. By appropriately matching these constraints to operational scenarios, navigation solution accuracy is improved, lost information is compensated, and certain internal states become observable.
What carries the argument
The three-way classification into direct, indirect, and model aiding, which organizes how system knowledge is converted into navigation-filter measurement updates.
If this is right
- Direct aiding supplies immediate external measurements derived from known conditions.
- Indirect aiding derives measurements from relations among system states.
- Model aiding imposes dynamic or kinematic constraints as pseudo-measurements.
- Each category supplies explicit state-update equations and measurement models that can be inserted into existing filters.
- Appropriate selection of aiding type bounds error growth and restores observability.
Where Pith is reading between the lines
- Hybrid systems could switch among the three aiding types in real time according to detected conditions.
- The same classification could be tested on non-navigation estimation problems that also suffer from intermittent measurements.
- Implementation details such as tuning or computational cost are left for follow-on work rather than quantified here.
Load-bearing premise
That the methods surveyed in the literature transfer to new platforms and environments without major unstated implementation barriers and that the three categories cover the main practical approaches.
What would settle it
An experiment that applies one of the surveyed aiding techniques to a new platform and environment and finds no measurable reduction in drift or no increase in observability of the claimed internal states.
Figures







read the original abstract
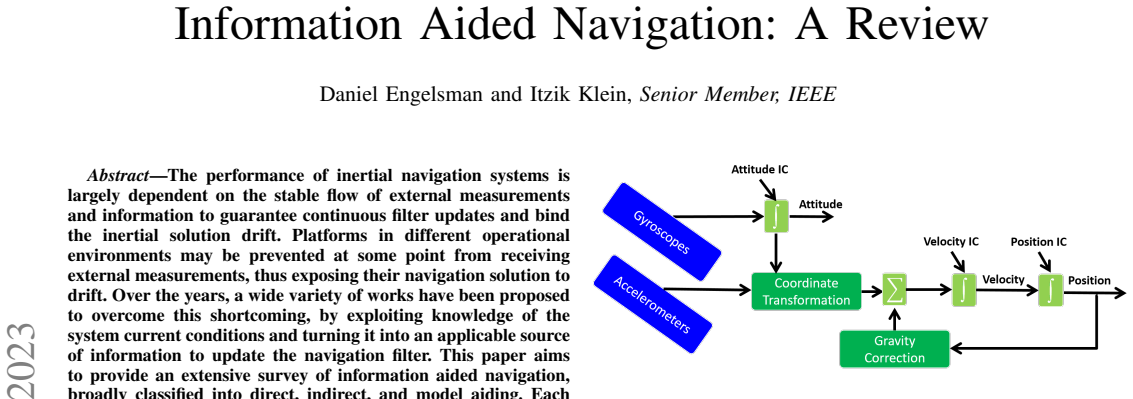
The performance of inertial navigation systems is largely dependent on the stable flow of external measurements and information to guarantee continuous filter updates and bind the inertial solution drift. Platforms in different operational environments may be prevented at some point from receiving external measurements, thus exposing their navigation solution to drift. Over the years, a wide variety of works have been proposed to overcome this shortcoming, by exploiting knowledge of the system current conditions and turning it into an applicable source of information to update the navigation filter. This paper aims to provide an extensive survey of information aided navigation, broadly classified into direct, indirect, and model aiding. Each approach is described by the notable works that implemented its concept, use cases, relevant state updates, and their corresponding measurement models. By matching the appropriate constraint to a given scenario, one will be able to improve the navigation solution accuracy, compensate for the lost information, and uncover certain internal states, that would otherwise remain unobservable.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a literature survey on information-aided navigation for inertial systems. It organizes prior work into three categories—direct, indirect, and model aiding—describing for each the motivating use cases, state-vector updates, and measurement models drawn from the cited publications. The central claim is that selecting the appropriate constraint for a given operational scenario improves navigation accuracy, compensates for missing external measurements, and renders otherwise unobservable states observable.
Significance. If the classification is accurate and the reviewed measurement models are faithfully summarized, the paper supplies a structured reference that could help practitioners match aiding techniques to platform constraints. The absence of new derivations or fitted parameters means its value rests entirely on the completeness and balance of the literature synthesis.
minor comments (3)
- [Abstract] Abstract: the phrase 'extensive survey' is not supported by any quantitative statement (number of papers, time span, or search methodology); adding such detail would clarify scope.
- [Introduction / Classification section] The three-way classification is presented as the organizing principle, yet the manuscript does not explicitly justify why other common taxonomies (e.g., by sensor modality or by observability analysis) were not adopted or compared.
- [Throughout the three category sections] Measurement-model equations are referenced from prior works; the survey would benefit from a short table that lists the key state components updated in each category to improve readability.
Simulated Author's Rebuttal
We thank the referee for their review of our survey on information-aided navigation. The report recommends minor revision and notes the potential value of the classification into direct, indirect, and model aiding approaches, along with the associated use cases and measurement models. No specific major comments are listed in the provided report, so we have no individual points to address point-by-point. We remain available to incorporate any minor changes the editor or referee may identify.
Circularity Check
Literature survey with no derivations or predictions
full rationale
This paper is a review surveying existing literature on information aided navigation, classifying approaches into direct, indirect, and model aiding categories. It summarizes use cases, state updates, and measurement models from prior publications without presenting any original equations, derivations, fitted parameters, or predictions. The central claim is a general statement of utility drawn from the reviewed literature rather than an original assertion. No load-bearing steps exist that could reduce to inputs by construction, self-citation, or ansatz. The paper is self-contained as a survey against external benchmarks.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Parametric and State Estimation of Stationary MEMS-IMUs: A Tutorial
A tutorial analyzes error behavior in stationary levelled MEMS-IMU arrays versus time and sensor count, showing analytical models match experiments with gains in signal quality and navigation states.
Reference graph
Works this paper leans on
-
[1]
D. Titterton and J. L. Weston, Strapdown Inertial Navigation Tech- nology. American Institute of Aeronautics and Astronautics and the Institution of Electrical Engineers, 2004
work page 2004
-
[2]
A. Noureldin, T. B. Karamat, and J. Georgy, Fundamentals of Inertial Naviagtion, Satellite-based Positioning and their Integration. Springer, 2013
work page 2013
-
[3]
Pedestrian navigation aids: information requirements and design implications,
A. J. May, T. Ross, S. H. Bayer, and M. J. Tarkiainen, “Pedestrian navigation aids: information requirements and design implications,” Personal and Ubiquitous Computing, vol. 7, no. 6, pp. 331–338, 2003
work page 2003
-
[4]
U. Nehmzow, “Animal and robot navigation,” in The Biology and Technology of Intelligent Autonomous Agents . Springer, 1995, pp. 258–274
work page 1995
-
[5]
K. R. Britting, Inertial Navigation Systems Analysis . John Wiley & Sons, Inc., 1971
work page 1971
-
[6]
Jekeli, Inertial navigation systems with geodetic applications
C. Jekeli, Inertial navigation systems with geodetic applications. Wal- ter de Gruyter Berlin, Germany, 2000
work page 2000
-
[7]
J. A. Farrell, Aided Navigation GPS with High Rate Sensors. McGraw- Hill, 2008
work page 2008
-
[8]
P. D. Groves, Principles of GNSS , Inertial and Multisensor Integrated Navigation Systems. Artech House, 2013
work page 2013
-
[9]
P. S. Maybeck, Stochastic models, estimation, and control . Academic press, 1982
work page 1982
-
[10]
Observability analysis for tracking of coordinated turn maneuvers,
I. Klein, Y . Bar-Shalom, and I. Rusnak, “Observability analysis for tracking of coordinated turn maneuvers,” in 2014 IEEE 28th Conven- tion of Electrical & Electronics Engineers in Israel (IEEEI) . IEEE, 2014, pp. 1–5
work page 2014
-
[11]
Observability analysis of non-holonomic constraints for land-vehicle navigation systems,
Y . Li, X. Niu, Q. Zhang, Y . Cheng, and C. Shi, “Observability analysis of non-holonomic constraints for land-vehicle navigation systems,” in Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012) , 2012, pp. 1521–1529
work page 2012
-
[12]
An integrated GPS/MEMS-IMU navigation system for an autonomous helicopter,
J. Wendel, O. Meister, C. Schlaile, and G. F. Trommer, “An integrated GPS/MEMS-IMU navigation system for an autonomous helicopter,” Aerospace Science and Technology, vol. 10, no. 6, pp. 527–533, 2006
work page 2006
-
[13]
A review of navigation systems (integration and algorithms),
A. M. Hasan, K. Samsudin, A. R. Ramli, R. Azmir, and S. Ismaeel, “A review of navigation systems (integration and algorithms),” Australian Journal of Basic and Applied Sciences , vol. 3, no. 2, pp. 943–959, 2009
work page 2009
-
[14]
Remote sensing platforms and sensors: A survey,
C. Toth and G. J ´o´zk´ow, “Remote sensing platforms and sensors: A survey,” ISPRS Journal of Photogrammetry and Remote Sensing , vol. 115, pp. 22–36, 2016
work page 2016
-
[15]
O. Kubitz, M. O. Berger, M. Perlick, and R. Dumoulin, “Application of radio frequency identification devices to support navigation of autonomous mobile robots,” in 1997 IEEE 47th Vehicular Technology Conference. Technology in Motion, vol. 1. IEEE, 1997, pp. 126–130
work page 1997
-
[16]
Non-GNSS radio frequency navigation,
J. Raquet and R. K. Martin, “Non-GNSS radio frequency navigation,” in 2008 IEEE International Conference on Acoustics, Speech and Signal Processing. IEEE, 2008, pp. 5308–5311
work page 2008
-
[17]
Indoor localization us- ing FM radio signals: A fingerprinting approach,
V . Moghtadaiee, A. G. Dempster, and S. Lim, “Indoor localization us- ing FM radio signals: A fingerprinting approach,” in 2011 International Conference on Indoor Positioning and Indoor Navigation. IEEE, 2011, pp. 1–7
work page 2011
-
[18]
Wi-Fi localization and navigation for autonomous indoor mobile robots,
J. Biswas and M. Veloso, “Wi-Fi localization and navigation for autonomous indoor mobile robots,” in 2010 IEEE international con- ference on robotics and automation . IEEE, 2010, pp. 4379–4384
work page 2010
-
[19]
Spotfi: Decimeter level localization using Wi-Fi,
M. Kotaru, K. Joshi, D. Bharadia, and S. Katti, “Spotfi: Decimeter level localization using Wi-Fi,” in Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication, 2015, pp. 269–282
work page 2015
-
[20]
Decimeter-level localization with a single Wi-Fi access point,
D. Vasisht, S. Kumar, and D. Katabi, “Decimeter-level localization with a single Wi-Fi access point,” in 13th {USENIX} Symposium on Networked Systems Design and Implementation ( {NSDI} 16), 2016, pp. 165–178
work page 2016
-
[21]
A sonar-based mapping and navigation system,
A. Elfes, “A sonar-based mapping and navigation system,” in Proceed- ings. 1986 IEEE International Conference on Robotics and Automation, vol. 3, 1986, pp. 1151–1156
work page 1986
-
[22]
Sonar-based real-world mapping and navigation,
——, “Sonar-based real-world mapping and navigation,” IEEE Journal on Robotics and Automation , vol. 3, no. 3, pp. 249–265, 1987
work page 1987
-
[23]
J. J. Leonard and H. F. Durrant-Whyte, Directed sonar sensing for mobile robot navigation . Springer Science & Business Media, 2012, vol. 175
work page 2012
-
[24]
Range-only positioning of a deep- diving autonomous underwater vehicle from a surface ship,
S. D. McPhail and M. Pebody, “Range-only positioning of a deep- diving autonomous underwater vehicle from a surface ship,” IEEE Journal of Oceanic Engineering , vol. 34, no. 4, pp. 669–677, 2009
work page 2009
-
[25]
AUV range-only localization and mapping: Observer design and experimental results,
M. Bayat and A. P. Aguiar, “AUV range-only localization and mapping: Observer design and experimental results,” in 2013 European Control Conference (ECC). IEEE, 2013, pp. 4394–4399
work page 2013
-
[26]
M. Bayat, N. Crasta, A. P. Aguiar, and A. M. Pascoal, “Range- based underwater vehicle localization in the presence of unknown ocean currents: Theory and experiments,” IEEE Transactions on control systems technology, vol. 24, no. 1, pp. 122–139, 2015
work page 2015
-
[27]
S. M. Smith and D. Kronen, “Experimental results of an inexpensive short baseline acoustic positioning system for AUV navigation,” in OCEANS’ 97. MTS/IEEE Conference Proceedings, vol. 1. IEEE, 1997, pp. 714–720
work page 1997
-
[28]
On spatial uncertainty in a surface long baseline positioning system,
L. Collin, S. Azou, K. C. Yao, and G. Burel, “On spatial uncertainty in a surface long baseline positioning system,” in Fifth European Conference on Underwater Acoustics, ECUA 2000 , 2000
work page 2000
-
[29]
Synthetic long baseline navigation of underwater vehicles,
M. B. Larsen, “Synthetic long baseline navigation of underwater vehicles,” in OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No. 00CH37158) , vol. 3. IEEE, 2000, pp. 2043–2050
work page 2000
-
[30]
Long-baseline acoustic navigation for under-ice autonomous underwater vehicle operations,
M. V . Jakuba, C. N. Roman, H. Singh, C. Murphy, C. Kunz, C. Willis, T. Sato, and R. A. Sohn, “Long-baseline acoustic navigation for under-ice autonomous underwater vehicle operations,” Journal of Field Robotics, vol. 25, no. 11-12, pp. 861–879, 2008
work page 2008
-
[31]
Doppler velocity log (DVL) navigation for observation- class ROVs,
J. Snyder, “Doppler velocity log (DVL) navigation for observation- class ROVs,” in OCEANS 2010 MTS/IEEE Seattle . IEEE, 2010, pp. 1–9
work page 2010
-
[32]
W. Gao, Y . Zhang, and J. Wang, “A strapdown inertial navigation system/beidou/doppler velocity log integrated navigation algorithm based on a cubature Kalman filter,” Sensors, vol. 14, no. 1, pp. 1511– 1527, 2014
work page 2014
-
[33]
L. Chang, Y . Li, and B. Xue, “Initial alignment for a doppler velocity log-aided strapdown inertial navigation system with limited informa- tion,” IEEE/ASME Transactions on Mechatronics , vol. 22, no. 1, pp. 329–338, 2016
work page 2016
-
[34]
N. Clark and P. Furth, “Intelligent star tracker,” in Proceedings of the 43rd IEEE Midwest Symposium on Circuits and Systems (Cat. No. CH37144), vol. 3. IEEE, 2000, pp. 1430–1433
work page 2000
-
[35]
GPS/INS/star tracker navi- gation using a software defined radio,
A. Brown, B. Mathews, and D. Nguyen, “GPS/INS/star tracker navi- gation using a software defined radio,” in Proceedings of 29th Annual AAS Guidance and Control Conference, Breckenridge, Colorado, 2007
work page 2007
-
[36]
Optimal attitude and position determination by integration of INS, star tracker, and horizon sensor,
A. M. Rad, J. H. Nobari, and A. A. Nikkhah, “Optimal attitude and position determination by integration of INS, star tracker, and horizon sensor,” IEEE Aerospace and Electronic Systems Magazine , vol. 29, no. 4, pp. 20–33, 2014
work page 2014
-
[37]
GNSS/INS/star tracker integrated navigation system for earth- moon transfer orbit,
V . Capuano, C. Botteron, Y . Wang, J. Tian, J. Lecl `ere, and P.-A. Farine, “GNSS/INS/star tracker integrated navigation system for earth- moon transfer orbit,” in Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), 2014, pp. 1433–1447
work page 2014
-
[38]
Basic principles of celestial navigation,
J. A. Van Allen, “Basic principles of celestial navigation,” American Journal of Physics , vol. 72, no. 11, pp. 1418–1424, 2004
work page 2004
-
[39]
X. Ning and J. Fang, “An autonomous celestial navigation method for leo satellite based on unscented Kalman filter and information fusion,” Aerospace Science and Technology, vol. 11, no. 2-3, pp. 222–228, 2007
work page 2007
-
[40]
Karl, Celestial navigation in the GPS age
J. Karl, Celestial navigation in the GPS age . Paradise Cay Publica- tions, 2007
work page 2007
-
[41]
Applications of magnetic sensors for low cost compass systems,
M. J. Caruso, “Applications of magnetic sensors for low cost compass systems,” in IEEE 2000. Position location and navigation symposium (Cat. No. 00CH37062) . IEEE, 2000, pp. 177–184
work page 2000
-
[42]
Magnetometer and differential carrier phase GPS-aided INS for advanced vehicle control,
Y . Yang and J. A. Farrell, “Magnetometer and differential carrier phase GPS-aided INS for advanced vehicle control,” IEEE Transactions on Robotics and Automation , vol. 19, no. 2, pp. 269–282, 2003
work page 2003
-
[43]
Geomagnetic navigation beyond the magnetic com- pass,
F. Goldenberg, “Geomagnetic navigation beyond the magnetic com- pass,” in Proceedings of IEEE/ION PLANS 2006 , 2006, pp. 684–694
work page 2006
-
[44]
Vision-based navigation and environmental representations with an omnidirectional camera,
J. Gaspar, N. Winters, and J. Santos-Victor, “Vision-based navigation and environmental representations with an omnidirectional camera,” IEEE Transactions on Robotics and Automation , vol. 16, no. 6, pp. 890–898, 2000
work page 2000
-
[45]
Vision based navigation for an unmanned aerial vehicle,
B. Sinopoli, M. Micheli, G. Donato, and T.-J. Koo, “Vision based navigation for an unmanned aerial vehicle,” in Proceedings 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), vol. 2. IEEE, 2001, pp. 1757–1764
work page 2001
-
[46]
Vision-aided navigation for small UA Vs in GPS-challenged environ- ments,
R. Madison, G. Andrews, P. DeBitetto, S. Rasmussen, and M. Bottkol, “Vision-aided navigation for small UA Vs in GPS-challenged environ- ments,” in AIAA Infotech@ Aerospace 2007 Conference and Exhibit , 2007, p. 2986
work page 2007
-
[47]
Vision-based odometry and slam for medium and high altitude flying UA Vs,
F. Caballero, L. Merino, J. Ferruz, and A. Ollero, “Vision-based odometry and slam for medium and high altitude flying UA Vs,”Journal of Intelligent and Robotic Systems , vol. 54, no. 1, pp. 137–161, 2009
work page 2009
-
[48]
O. S. Salychev, Inertial systems in navigation and geophysics. Bauman MSTU Press Moscow, Russia, 1998
work page 1998
-
[49]
Bridging GPS gaps in urban canyons: The benefits of ZUPTs,
D. A. Grejner-Brzezinska, Y . Yi, and C. K. Toth, “Bridging GPS gaps in urban canyons: The benefits of ZUPTs,” Navigation, vol. 48, no. 4, pp. 216–226, 2001
work page 2001
-
[50]
Bridging GPS gaps in urban canyons: Can ZUPT really help?
D. A. Grejner-Brzezinska, C. K. Toth, and Y . Yi, “Bridging GPS gaps in urban canyons: Can ZUPT really help?” in Proceedings of the 58th Annual Meeting of The Institute of Navigation and CIGTF 21st Guidance Test Symposium (2002) , 2002, pp. 231–240
work page 2002
-
[51]
L. Xiaofang, M. Yuliang, X. Ling, C. Jiabin, and S. Chunlei, “Ap- plications of zero-velocity detector and Kalman filter in zero velocity update for inertial navigation system,” in Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference . IEEE, 2014, pp. 1760–1763
work page 2014
-
[52]
Improved filter estimation method applied in zero velocity update for SINS,
Y . Ben, G. Yin, W. Gao, and F. Sun, “Improved filter estimation method applied in zero velocity update for SINS,” in 2009 International Conference on Mechatronics and Automation. IEEE, 2009, pp. 3375– 3380
work page 2009
-
[53]
A smoother for attitude and position estimation using inertial sensors with zero velocity intervals,
Y . S. Suh, “A smoother for attitude and position estimation using inertial sensors with zero velocity intervals,” IEEE Sensors Journal , vol. 12, no. 5, pp. 1255–1262, 2011
work page 2011
-
[54]
H. T. Duong and Y . S. Suh, “A computationally efficient suboptimal smoother for attitude and position estimation using inertial sensors,” in 2015 15th International Conference on Control, Automation and Systems (ICCAS). IEEE, 2015, pp. 1410–1412
work page 2015
-
[55]
Estimating vehicle state by GPS/IMU fusion with vehicle dynamics,
K. Saadeddin, M. F. Abdel-Hafez, and M. A. Jarrah, “Estimating vehicle state by GPS/IMU fusion with vehicle dynamics,” Journal of Intelligent & Robotic Systems , vol. 74, no. 1, pp. 147–172, 2014
work page 2014
-
[56]
A simple smoother for attitude and position estimation using inertial sensor,
H. T. Duong and Y . S. Suh, “A simple smoother for attitude and position estimation using inertial sensor,” International Journal of Control, Automation and Systems , vol. 14, no. 6, pp. 1626–1630, 2016
work page 2016
-
[57]
INS fine alignment with low-cost gyro- scopes: Adaptive filters for different measurement types,
I. Klein and Y . Bar-Shalom, “INS fine alignment with low-cost gyro- scopes: Adaptive filters for different measurement types,”IEEE Access, vol. 9, pp. 79 021–79 032, 2021
work page 2021
-
[58]
Pedestrian tracking with shoe-mounted inertial sensors,
E. Foxlin, “Pedestrian tracking with shoe-mounted inertial sensors,” IEEE Computer Graphics and Applications , vol. 25, no. 6, pp. 38–46, 2005
work page 2005
-
[59]
Zero-velocity detection—an algorithm evaluation,
I. Skog, P. Handel, J.-O. Nilsson, and J. Rantakokko, “Zero-velocity detection—an algorithm evaluation,” IEEE Transactions on Biomedical Engineering, vol. 57, no. 11, pp. 2657–2666, 2010
work page 2010
-
[60]
Evaluation of zero-velocity detectors for foot-mounted inertial navigation systems,
I. Skog, J.-O. Nilsson, and P. H ¨andel, “Evaluation of zero-velocity detectors for foot-mounted inertial navigation systems,” in 2010 In- ternational Conference on Indoor Positioning and Indoor Navigation . IEEE, 2010, pp. 1–6
work page 2010
-
[61]
Tutorial: Implementing a pedestrian tracker using inertial sensors,
C. Fischer, P. T. Sukumar, and M. Hazas, “Tutorial: Implementing a pedestrian tracker using inertial sensors,” IEEE pervasive computing , vol. 12, no. 2, pp. 17–27, 2012
work page 2012
-
[62]
Foot-and knee- mounted INS for firefighter localization,
J. Rantakokko, P. Str ¨omb¨ack, and P. Anderson, “Foot-and knee- mounted INS for firefighter localization,” in Proceedings of the 2014 International Technical Meeting of the Institute of Navigation , 2014, pp. 145–153
work page 2014
-
[63]
PDR/INS/Wi-Fi inte- gration based on handheld devices for indoor pedestrian navigation,
Y . Zhuang, H. Lan, Y . Li, and N. El-Sheimy, “PDR/INS/Wi-Fi inte- gration based on handheld devices for indoor pedestrian navigation,” Micromachines, vol. 6, no. 6, pp. 793–812, 2015
work page 2015
-
[64]
High- precision and robust indoor localization based on foot-mounted inertial sensors,
J. Ruppelt, N. Kronenwett, G. Scholz, and G. F. Trommer, “High- precision and robust indoor localization based on foot-mounted inertial sensors,” in Proceedings of IEEE/ION PLANS 2016 , 2016, pp. 67–75
work page 2016
-
[65]
Enhanced pedestrian navigation based on course angle error estimation using cascaded Kalman filters,
J. W. Song and C. G. Park, “Enhanced pedestrian navigation based on course angle error estimation using cascaded Kalman filters,” Sensors, vol. 18, no. 4, p. 1281, 2018
work page 2018
-
[66]
H. Fourati, “Heterogeneous data fusion algorithm for pedestrian nav- igation via foot-mounted inertial measurement unit and complemen- tary filter,” IEEE Transactions on Instrumentation and Measurement , vol. 64, no. 1, pp. 221–229, 2014
work page 2014
-
[67]
X. Tong, Y . Su, Z. Li, C. Si, G. Han, J. Ning, and F. Yang, “A double- step unscented Kalman filter and HMM-based zero-velocity update for pedestrian dead reckoning using MEMS sensors,” IEEE Transactions on Industrial Electronics , vol. 67, no. 1, pp. 581–591, 2019
work page 2019
-
[68]
Altitude accuracy while tracking pedestrians using a boot-mounted IMU,
W. T. Faulkner, R. Alwood, D. W. Taylor, and J. Bohlin, “Altitude accuracy while tracking pedestrians using a boot-mounted IMU,” in IEEE/ION Position, Location and Navigation Symposium. IEEE, 2010, pp. 90–96
work page 2010
-
[69]
A robust pedestrian navigation algorithm with low cost IMU,
Y . Li and J. J. Wang, “A robust pedestrian navigation algorithm with low cost IMU,” in 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN) . IEEE, 2012, pp. 1–7
work page 2012
-
[70]
Understanding the performance of zero velocity updates in MEMS-based pedestrian navigation,
K. Abdulrahim, T. Moore, C. Hide, and C. Hill, “Understanding the performance of zero velocity updates in MEMS-based pedestrian navigation,” International Journal of Advancements in Technology , vol. 5, no. 2, 2014
work page 2014
-
[71]
A novel pedestrian navigation algorithm for a foot-mounted inertial-sensor- based system,
M. Ren, K. Pan, Y . Liu, H. Guo, X. Zhang, and P. Wang, “A novel pedestrian navigation algorithm for a foot-mounted inertial-sensor- based system,” Sensors, vol. 16, no. 1, p. 139, 2016
work page 2016
-
[72]
Adaptive zero velocity update based on velocity classification for pedestrian tracking,
R. Zhang, H. Yang, F. H ¨oflinger, and L. M. Reindl, “Adaptive zero velocity update based on velocity classification for pedestrian tracking,” IEEE Sensors Journal , vol. 17, no. 7, pp. 2137–2145, 2017
work page 2017
-
[73]
BDS PPP/INS tight coupling method based on non-holonomic constraint and zero velocity update,
W. Sun and Y . Yang, “BDS PPP/INS tight coupling method based on non-holonomic constraint and zero velocity update,” IEEE Access, vol. 8, pp. 128 866–128 876, 2020
work page 2020
-
[74]
Observability of strapdown INS alignment: A global perspective,
Y . Wu, H. Zhang, M. Wu, X. Hu, and D. Hu, “Observability of strapdown INS alignment: A global perspective,” IEEE Transactions on Aerospace and Electronic Systems, vol. 48, no. 1, pp. 78–102, 2012
work page 2012
-
[75]
Foot-mounted INS for everybody-an open-source embedded implementation,
J.-O. Nilsson, I. Skog, P. H ¨andel, and K. Hari, “Foot-mounted INS for everybody-an open-source embedded implementation,” in Proceedings of IEEE/ION PLANS 2012 , 2012, pp. 140–145
work page 2012
-
[76]
Foot-mounted inertial navigation made easy,
J.-O. Nilsson, A. K. Gupta, and P. H ¨andel, “Foot-mounted inertial navigation made easy,” in 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN) . IEEE, 2014, pp. 24–29
work page 2014
-
[77]
Control theoretic approach to inertial navigation systems,
I. Y . Bar-Itzhack and N. Berman, “Control theoretic approach to inertial navigation systems,” Journal of Guidance, Control, and Dynamics , vol. 11, no. 3, pp. 237–245, 1988
work page 1988
-
[78]
On the mea- surement selection for stationary SINS alignment Kalman filters,
F. O. Silva, E. M. Hemerly, and W. C. Leite Filho, “On the mea- surement selection for stationary SINS alignment Kalman filters,” Measurement, vol. 130, pp. 82–93, 2018
work page 2018
-
[79]
Distance estimation using inertial sensor and vision,
Y . S. Suh, N. H. Q. Phuong, and H. J. Kang, “Distance estimation using inertial sensor and vision,” International Journal of Control, Automation and Systems , vol. 11, no. 1, pp. 211–215, 2013
work page 2013
-
[80]
A. Noureldin, D. Irvine-Halliday, and M. P. Mintchev, “Accuracy limitations of FOG-based continuous measurement-while-drilling sur- veying instruments for horizontal wells,” IEEE Transactions on Instru- mentation and Measurement , vol. 51, no. 6, pp. 1177–1191, 2002
work page 2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.