Amplifying robotics capacities with a human touch: An immersive low-latency panoramic remote system
Pith reviewed 2026-05-24 04:32 UTC · model grok-4.3
The pith
The Avatar system delivers 357ms latency for VR-based panoramic remote robot control over long distances.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
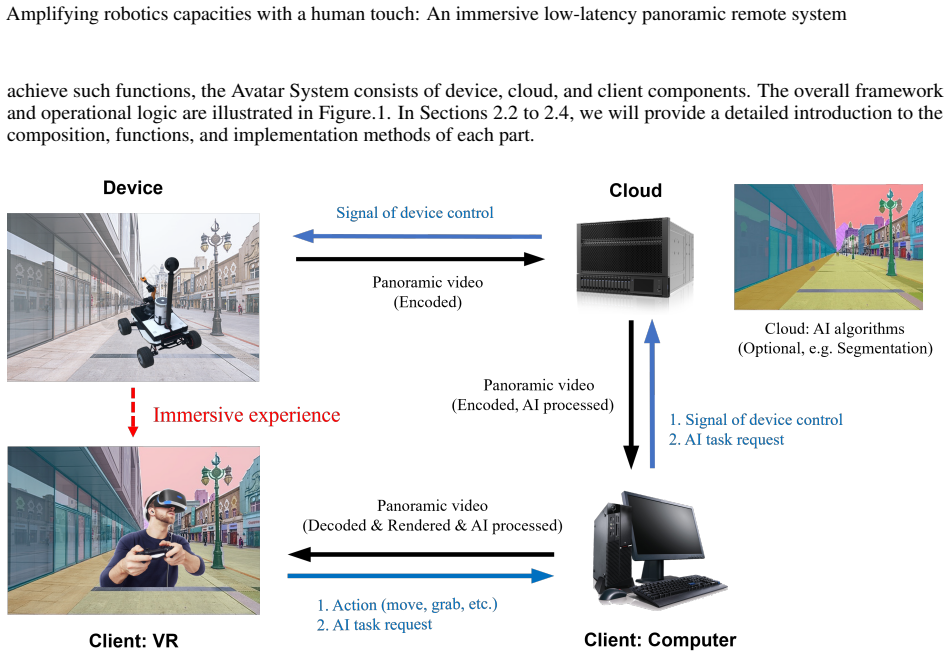
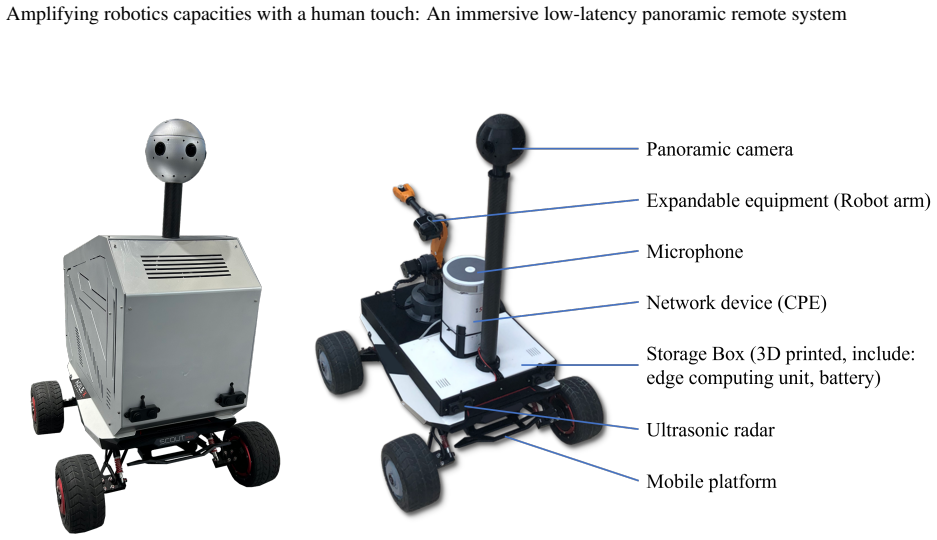
The Avatar system is an immersive low-latency panoramic human-robot interaction platform. Its tested prototype integrates a rugged mobile base with edge computing units, panoramic video capture, power batteries, robot arms, and network equipment. Under favorable network conditions the system achieves a 357ms delay for high-definition panoramic visuals, allowing operators to use VR headsets and controllers for real-time immersive control while visual SLAM supplies map and trajectory data for autonomous navigation across continents.
What carries the argument
The Avatar system, an integrated hardware-software platform that streams panoramic video at low latency while accepting VR inputs for remote robot commands.
If this is right
- Remote control becomes feasible across campuses, provinces, countries, and continents.
- Visual SLAM supplies recorded maps and trajectories that enable autonomous navigation.
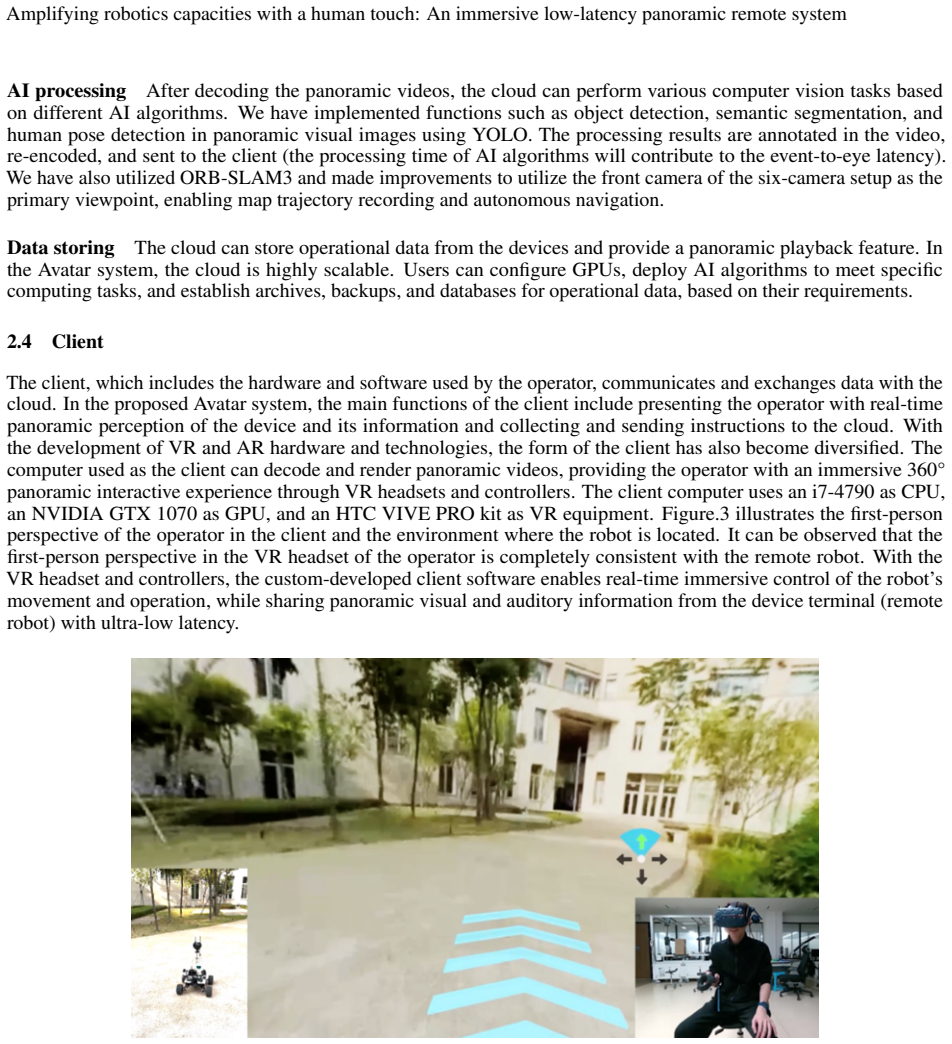
- Operators gain real-time immersive control through VR headsets and controllers.
- The platform can raise efficiency and situational awareness in human-robot collaboration tasks.
Where Pith is reading between the lines
- If the latency holds under variable networks, the approach could extend to time-critical remote operations such as inspection or maintenance in hazardous sites.
- The edge-computing design on the mobile platform implies the system could scale to fleets of robots without central bottlenecks.
- Adding higher-level AI planning on top of the low-latency video link would let operators supervise rather than directly teleoperate.
Load-bearing premise
That network conditions will stay favorable enough for the integrated hardware and software to sustain the stated 357ms latency in deployed use.
What would settle it
An independent measurement of round-trip latency while an operator in New York controls the prototype in Shenzhen under ordinary public-internet conditions.
Figures
read the original abstract
AI and robotics technologies have witnessed remarkable advancements in the past decade, revolutionizing work patterns and opportunities in various domains. The application of these technologies has propelled society towards an era of symbiosis between humans and machines. To facilitate efficient communication between humans and intelligent robots, we propose the "Avatar" system, an immersive low-latency panoramic human-robot interaction platform. We have designed and tested a prototype of a rugged mobile platform integrated with edge computing units, panoramic video capture devices, power batteries, robot arms, and network communication equipment. Under favorable network conditions, we achieved a low-latency high-definition panoramic visual experience with a delay of 357ms. Operators can utilize VR headsets and controllers for real-time immersive control of robots and devices. The system enables remote control over vast physical distances, spanning campuses, provinces, countries, and even continents (New York to Shenzhen). Additionally, the system incorporates visual SLAM technology for map and trajectory recording, providing autonomous navigation capabilities. We believe that this intuitive system platform can enhance efficiency and situational experience in human-robot collaboration, and with further advancements in related technologies, it will become a versatile tool for efficient and symbiotic cooperation between AI and humans.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents the 'Avatar' system, an immersive low-latency panoramic human-robot interaction platform. It describes a rugged mobile prototype integrating edge computing units, panoramic video capture, power batteries, robot arms, and network equipment. Under favorable network conditions, the system is claimed to deliver a 357 ms end-to-end latency for high-definition panoramic video, enabling real-time VR headset and controller control of robots over intercontinental distances (New York to Shenzhen). The system also incorporates visual SLAM for map/trajectory recording and autonomous navigation capabilities.
Significance. If the 357 ms latency claim were supported by reproducible measurements, the work could offer a practical demonstration of long-distance immersive remote robotics. However, the contribution is primarily a system description using established components (panoramic cameras, VR, edge computing, SLAM); its significance hinges entirely on the unverified performance metric rather than novel algorithms or theoretical advances.
major comments (1)
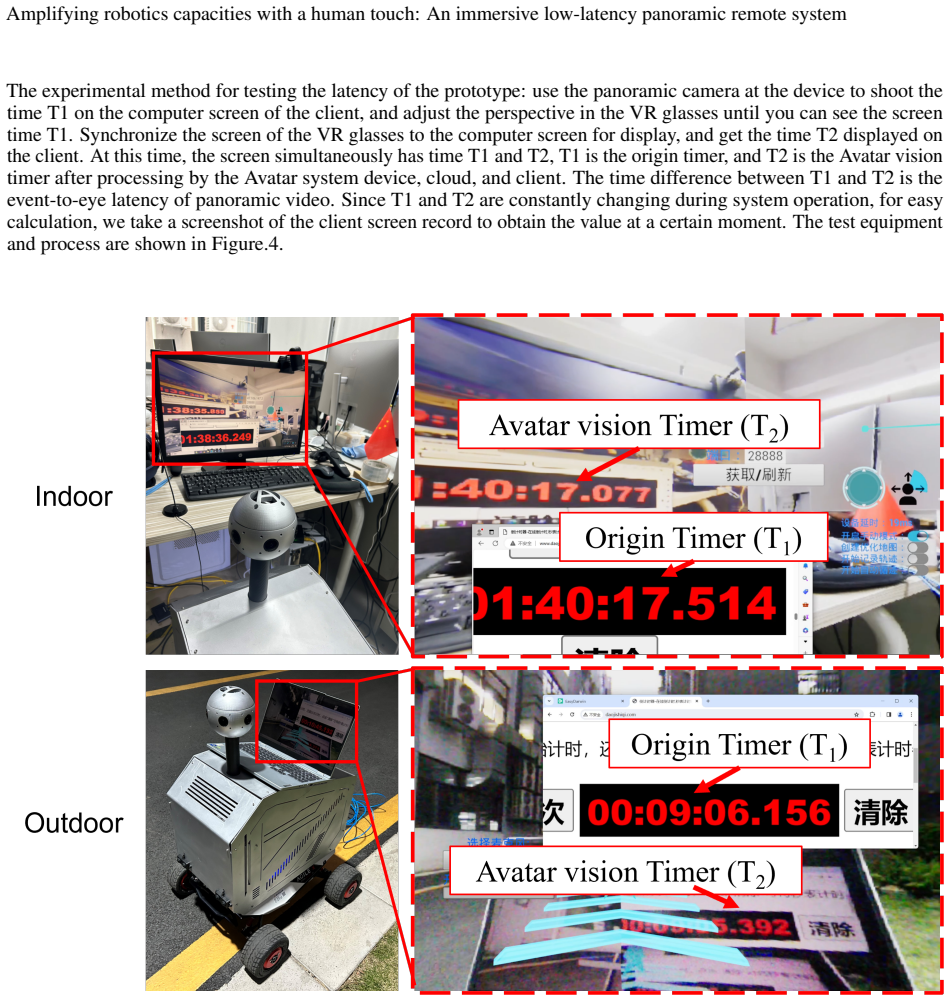
- [Abstract] Abstract: The central performance claim of a 357 ms latency is stated without any measurement protocol (e.g., capture-to-display timestamping, encoding/transmission/decoding pipeline), network parameters realized (bandwidth, one-way delay, jitter, packet loss), number of trials, or variability statistics. This leaves the primary empirical assertion unsupported and impossible to evaluate or reproduce.
Simulated Author's Rebuttal
We thank the referee for their review. We address the single major comment below and agree that additional details are needed to support the latency claim.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central performance claim of a 357 ms latency is stated without any measurement protocol (e.g., capture-to-display timestamping, encoding/transmission/decoding pipeline), network parameters realized (bandwidth, one-way delay, jitter, packet loss), number of trials, or variability statistics. This leaves the primary empirical assertion unsupported and impossible to evaluate or reproduce.
Authors: We agree that the abstract (and current manuscript) does not include a detailed measurement protocol or statistics for the 357 ms end-to-end latency. The reported figure comes from prototype tests under favorable intercontinental network conditions, but the specific methodology, pipeline breakdown, network parameters, trial count, and variability were omitted. In the revised manuscript we will add a dedicated 'Latency Measurement' subsection (likely in Section 4 or a new evaluation section) that specifies: (1) the timestamping method (capture-to-display), (2) the full encoding/transmission/decoding pipeline, (3) observed network parameters, (4) number of trials, and (5) basic statistics. This will make the claim reproducible and directly address the referee's concern. revision: yes
Circularity Check
No circularity: empirical system report with no derivations or self-referential predictions
full rationale
The manuscript is a hardware/software prototype description. It reports an observed end-to-end latency figure (357 ms) under stated favorable network conditions but supplies no equations, fitted parameters, uniqueness theorems, or predictive models. No step reduces a claimed result to its own inputs by construction, self-citation, or renaming. The central performance assertion is presented as a direct measurement, not a derivation; therefore the circularity score is 0.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Real-time multi-gpu-based 8kvr stitching and streaming on 5g mec/cloud environments
HeeKyung Lee, Gi-Mun Um, Seong Yong Lim, Jeongil Seo, and Moonsung Gwak. Real-time multi-gpu-based 8kvr stitching and streaming on 5g mec/cloud environments. ETRI Journal, 44(1):62–72, 2022
work page 2022
-
[2]
Towards low-latency and high-quality adaptive 360-degree streaming
Xuekai Wei, Mingliang Zhou, and Weijia Jia. Towards low-latency and high-quality adaptive 360-degree streaming. IEEE Transactions on Industrial Informatics , 2022
work page 2022
-
[3]
Haitian Pang, Cong Zhang, Fangxin Wang, Jiangchuan Liu, and Lifeng Sun. Towards low latency multi-viewpoint 360 interactive video: A multimodal deep reinforcement learning approach. In IEEE INFOCOM 2019-IEEE Conference on Computer Communications, pages 991–999. IEEE, 2019
work page 2019
-
[4]
Research on panoramic stereo live streaming based on the virtual reality
Mingyao Zheng, Yun Tie, Fang Zhu, Lin Qi, and Yuning Gao. Research on panoramic stereo live streaming based on the virtual reality. In 2021 IEEE International Symposium on Circuits and Systems (ISCAS) , pages 1–5. IEEE, 2021
work page 2021
-
[5]
Low-latency implementation of 360 panoramic video viewing system
Jih-Sheng Tu, Kai-Shun Lin, Chun-Lung Lin, Jung-Yang Kao, Guan-Rong Shih, and Pei-Hsuan Tsai. Low-latency implementation of 360 panoramic video viewing system. In 2017 International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), pages 576–579. IEEE, 2017
work page 2017
-
[6]
360-degree video streaming: A survey of the state of the art
Rabia Shafi, Wan Shuai, and Muhammad Usman Younus. 360-degree video streaming: A survey of the state of the art. Symmetry, 12(9):1491, 2020
work page 2020
-
[7]
Dissecting latency in 360 video camera sensing systems
Zhisheng Yan and Jun Yi. Dissecting latency in 360 video camera sensing systems. Sensors, 22(16):6001, 2022
work page 2022
-
[8]
A survey on adaptive 360 video streaming: Solutions, challenges and opportunities
Abid Yaqoob, Ting Bi, and Gabriel-Miro Muntean. A survey on adaptive 360 video streaming: Solutions, challenges and opportunities. IEEE Communications Surveys & Tutorials, 22(4):2801–2838, 2020
work page 2020
-
[9]
Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam
Carlos Campos, Richard Elvira, Juan J Gómez Rodríguez, José MM Montiel, and Juan D Tardós. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Transactions on Robotics, 37(6):1874–1890, 2021. 9
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.