Information-theoretic derivation of energy, speed bounds, and quantum theory
Pith reviewed 2026-05-24 03:39 UTC · model grok-4.3
The pith
Collision models combined with four information principles derive quantum theory, energy observables, and the Mandelstam-Tamm bound.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
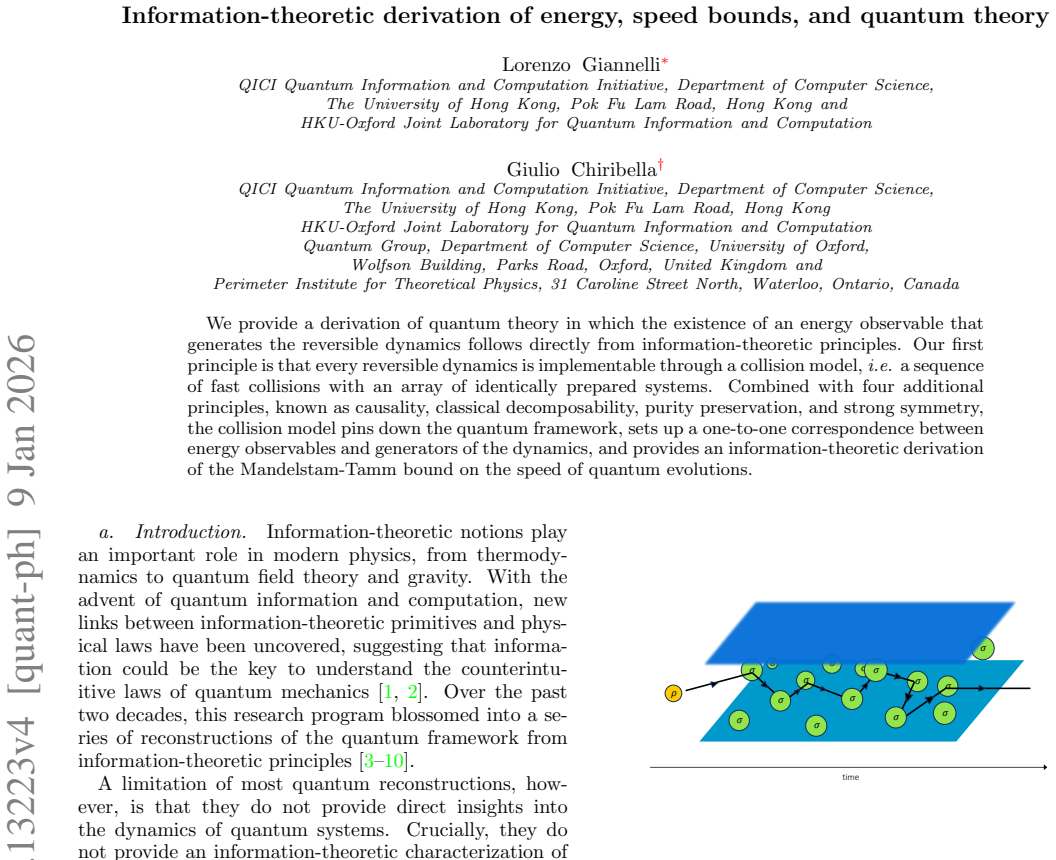
Every reversible dynamics is implementable through a collision model, i.e., a sequence of fast collisions with an array of identically prepared systems. Combined with causality, classical decomposability, purity preservation, and strong symmetry, the collision model pins down the quantum framework, sets up a one-to-one correspondence between energy observables and generators of the dynamics, and provides an information-theoretic derivation of the Mandelstam-Tamm bound on the speed of quantum evolutions.
What carries the argument
The collision model, defined as a sequence of fast collisions with identically prepared systems that implements any reversible dynamics and, together with the four listed principles, forces the structure of quantum theory and the energy-dynamics link.
If this is right
- Energy observables stand in one-to-one correspondence with the generators of reversible dynamics.
- The Mandelstam-Tamm bound on the speed of quantum evolutions follows directly from the five principles.
- The quantum framework is the unique theory satisfying the collision-model principle plus the four additional rules.
- All reversible dynamics in the resulting theory must admit a collision-model realization.
Where Pith is reading between the lines
- The same collision-model starting point might be used to derive additional quantum features such as the structure of measurements or entanglement.
- Testing whether alternative theories admit non-collision-model dynamics would provide an experimental route to distinguish the framework.
- The approach could be extended to derive other speed limits or uncertainty relations without presupposing Hilbert-space structure.
Load-bearing premise
Every reversible dynamics can be implemented through a sequence of fast collisions with an array of identically prepared systems.
What would settle it
Discovery of a reversible physical process that cannot be realized as a sequence of fast collisions with identically prepared auxiliary systems would falsify the starting principle.
Figures
read the original abstract
We provide a derivation of quantum theory in which the existence of an energy observable that generates the reversible dynamics follows directly from information-theoretic principles. Our first principle is that every reversible dynamics is implementable through a collision model, i.e. a sequence of fast collisions with an array of identically prepared systems. Combined with four additional principles, known as causality, classical decomposability, purity preservation, and strong symmetry, the collision model pins down the quantum framework, sets up a one-to-one correspondence between energy observables and generators of the dynamics, and provides an information-theoretic derivation of the Mandelstam-Tamm bound on the speed of quantum evolutions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to derive quantum theory from five information-theoretic principles. The first states that every reversible dynamics is implementable via a collision model (a sequence of fast collisions with identically prepared ancillas). Together with causality, classical decomposability, purity preservation, and strong symmetry, these principles are said to pin down the quantum framework, establish a one-to-one correspondence between energy observables and dynamical generators, and yield an information-theoretic derivation of the Mandelstam-Tamm bound.
Significance. If the derivation is free of circularity, the result would be significant for quantum foundations: it would ground the existence of an energy observable and quantum speed limits directly in axioms about information processing and dynamics, without presupposing Hilbert-space structure. The explicit link between collision models and the Mandelstam-Tamm bound is a concrete, falsifiable output that could be tested against other reconstructions.
major comments (1)
- [Abstract] Abstract: The collision-model principle is load-bearing for the central claim yet is introduced without independent motivation or reduction to weaker statements. The manuscript must show explicitly (in the derivation following the statement of the five principles) that this axiom does not already encode the tensor-product structure, identical preparations, and continuous unitary evolution that the remaining four principles are then used to constrain to quantum theory; otherwise the one-to-one energy-generator correspondence follows by construction rather than derivation.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for identifying a point that requires explicit clarification to strengthen the presentation. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The collision-model principle is load-bearing for the central claim yet is introduced without independent motivation or reduction to weaker statements. The manuscript must show explicitly (in the derivation following the statement of the five principles) that this axiom does not already encode the tensor-product structure, identical preparations, and continuous unitary evolution that the remaining four principles are then used to constrain to quantum theory; otherwise the one-to-one energy-generator correspondence follows by construction rather than derivation.
Authors: We agree that the collision-model principle is central and that its formulation must be shown not to presuppose the structures ultimately derived. The principle is stated operationally as the requirement that every reversible dynamics on a system can be realized by a sequence of interactions with an array of ancillary systems, each prepared in the same state, without reference to Hilbert-space structure, tensor products, or unitary operators. These features are instead obtained only after combining the principle with causality, classical decomposability, purity preservation, and strong symmetry. The explicit derivation of the Hilbert-space representation, the identification of generators with energy observables, and the Mandelstam-Tamm bound appear in Sections 3–5, where each step begins from the five axioms in their abstract form. To make this separation fully transparent, we will insert a short clarifying paragraph immediately after the statement of the five principles that explicitly notes which aspects of the collision model remain non-quantum and which structures are derived later. We will also add a brief remark in the abstract indicating that the energy-generator correspondence is obtained only from the full set of axioms. revision: yes
Circularity Check
No significant circularity; derivation presented as following from independent axioms
full rationale
The provided abstract explicitly lists five principles (collision model as first, plus causality, classical decomposability, purity preservation, and strong symmetry) as starting points. It claims these together derive the quantum framework, the 1-1 correspondence between energy observables and dynamical generators, and the Mandelstam-Tamm bound. No text is given showing any target result presupposed in the axioms, no fitted parameters renamed as predictions, no self-citation chains, and no ansatz smuggled via prior work. The collision-model principle is stated as an assumption rather than derived from the conclusions. Per the rules, absent specific quotes exhibiting reduction by construction, the finding is no circularity (score 0). This matches the most common honest outcome for axiomatic derivations that remain self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (5)
- domain assumption Every reversible dynamics is implementable through a collision model (sequence of fast collisions with identically prepared systems)
- domain assumption causality
- domain assumption classical decomposability
- domain assumption purity preservation
- domain assumption strong symmetry
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/LogicAsFunctionalEquation.leanSatisfiesLawsOfLogic + Translation Theorem contradicts?
contradictsCONTRADICTS: the theorem conflicts with this paper passage, or marks a claim that would need revision before publication.
Our first principle is that every reversible dynamics is implementable through a collision model, i.e. a sequence of fast collisions with an array of identically prepared systems.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel + dAlembert_to_ODE_general unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
DIN, C, CD, PP, and SS imply the standard Hilbert space framework... observable-generator duality
-
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking + 8-tick period unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 4 (Speed limit) ... Mandelstam-Tamm bound
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Consider the subspace ofS⊂L(V A) spanned byπ A(GA), namely S:=Span R πA(GA) . (32) This subspace can be equipped with a norm induced by the operational norm onG A by setting X i xi πA(Ui) S := X i xi Ui op , (33) for every set of real coefficients{x i}and every set of reversible transformations{U i} ⊂G A. Note that the norm of an elementX∈Sis independent ...
-
[2]
Extend the norm∥ · ∥ S to a norm onL(A). To this purpose, we decomposeL(V A) as L(VA) =S⊕S ⊥ , (37) whereS ⊥ is the orthogonal complement of the setSwith respect to the Hilbert-Schmidt inner product inL(V A). Hence, every elementX ∈L(V A) can be uniquely decomposed asX=X ∥ ⊕X ⊥, withX ∥ ∈SandX ⊥ ∈S ⊥. Then, we pick an arbitrary norm onS ⊥, denoted by∥ · ∥...
-
[3]
For every elementM ∈Transf R(A→A), the imageπ A(M) is in the subspaceS
Show thatπ A is an isometry. For every elementM ∈Transf R(A→A), the imageπ A(M) is in the subspaceS. Hence, we have ∥πA(M)∥=∥π A(M)∥S =∥M∥ op ∀M ∈Transf R(A→A)m(38) meaning thatπ A is an isometry. We now show thatπ A(GA) is compact. By definition,π A(GA) is a group of linear transformations ofV A into itself. SinceV A is finite-dimensional, the vector spa...
-
[4]
[46], where the one-parameter group governing Eq
Continuous-time limit of the partialSWAPquantum collision model We consider the quantum collision model of Ref. [46], where the one-parameter group governing Eq. (51) isS τ(· ⊗ σ) =e −iSWAPτ (· ⊗σ)e iSWAPτ , where we remind that theSWAPoperator is defined by the relationSWAP(|ψ⟩ ⊗ |ϕ⟩) = |ϕ⟩ ⊗ |ψ⟩for all pure states|ψ⟩,|ϕ⟩. Proposition 7.Given a quantum c...
-
[5]
PartialSWAPquantum collision model for arbitrary Hamiltonians. We now show that theSWAPquantum collision model can achieve, in the continuous time limit, any possible quantum unitary evolution for a suitable state of the reference system. Proposition 8.For any hermitian operatorHwith finite spectral radius, i.e.max{|λ 1|,. . .,|λ n|}<+∞where λ1,. . .,λ n ...
-
[6]
Informational equilibrium implies trivial collision model in real quantum theory In real quantum theory, the interaction between the system and its environment is described by a one-parameter group (S t)t∈R, consisting of linear maps of the formS t(·) =S t(·)S⊤ t , where eachS t :R d ⊗R d →R d ⊗R d is an orthogonal transformation. The stationarity at equi...
-
[7]
A universal collision model for real qubits We now show a collision model for two-dimensional systems in real quantum theory, with the feature that the model is universal (it can generate arbitrary dynamics) but not stationary at equilibrium. For a two-dimensional system A in RQT (arebit), the pure normalized state of the system can be represented by vect...
-
[8]
0 Λ N/2 where Λi = 0λ i −λi 0 (86) forλ i ≥0 for everyi= 1,. . .,N/2. Now, let us consider orthogonal matrices of the following block diagonal form Q(s) = R(s) 1 0. . .0 0R (s) 2 ... ... ... 0
-
[9]
0R (s) N/2 whereR (s) i = scos(θ i) sin(θ i) −sin(θ i)scos(θ i) fors=±1 andθ i ∈Rfori= 1,. . .,N/2. The sum ofQ (+1) +Q (−1) will then return a block diagonal matrix where thei-th 2×2 diagonal block is 2 0 sin(θ i) −sin(θ i) 0 . 37 By multiplying the above matrix sum for a positive scalarc, we look for a set of coefficients{c,θ 1,. . .,θ N/2}suc...
-
[10]
,d, it must be thate 1(ψ′ j) =δ 1j
(88) 38 Since Pd j=1 e1(ψ′ j) = 1 andp > p ′ j for allj= 2. . .,d, it must be thate 1(ψ′ j) =δ 1j. By the uniqueness of the state-effect correspondence,ψ 1 =ψ ′
-
[11]
(89) Sinceψ 2 is pure, it must be thatp ′ 2 = (1−p) and thatψ ′ 2 =ψ 2
Finally, it also holds that ψ2 = ρ−pψ 1 (1−p) = dX j=2 p′ j (1−p) ψ′ j . (89) Sinceψ 2 is pure, it must be thatp ′ 2 = (1−p) and thatψ ′ 2 =ψ 2. Proposition 17(Stationarity of the eigenstates).Given a vectorσ= P i xiψi ∈St R(A), its eigenstates{ψ i}i are invariant under the collisional dynamicsU t =e Gσt, whereG σ is defined as in Eq.(46). Proof.Let (U t)...
-
[12]
Also, letϕ 1 ∈Pur(A) be the target state undergoing the evolution generated byG σ
Proof of theorem 4: evolution of pure states Letσ∈St R(A) diagonalized asσ= Pd i=1 xiψi and letG σ be the generator of the collisional dynamics generated byσ. Also, letϕ 1 ∈Pur(A) be the target state undergoing the evolution generated byG σ. Lemma 19 gives ∥Gσϕ1∥2 =∥G ϕ1 σ∥2 =⟨G ϕ1 σ,G ϕ1 σ⟩=⟨σ,G ⊤ ϕ1 Gϕ1 σ⟩ ≤λ 2 max ⟨σ,σ⟩ − ⟨σ,Dσ⟩ whereDis the identity m...
-
[13]
By the convexity of the norm squared we get ∥Gσρ∥2 = dX j=1 qjGσψ′ j 2 ≤ dX j=1 qj Gσψ′ j 2
Proof of theorem 4: general case As before, letG σ be the generator of the collisional dynamics generated byσ= Pd i=1 piψi and letρ= Pd j=1 qjψ′ j be another state of system A. By the convexity of the norm squared we get ∥Gσρ∥2 = dX j=1 qjGσψ′ j 2 ≤ dX j=1 qj Gσψ′ j 2 . 43 Now, for everyjin the sum we can use the result of the previous section, namely ∥Gσ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.