What metric to optimize for suppressing instability in a Vlasov-Poisson system?
Pith reviewed 2026-05-22 19:39 UTC · model grok-4.3
The pith
Time-integrated objective functions create more convex-like landscapes that favor gradient-based optimization for suppressing instabilities in the Vlasov-Poisson system.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
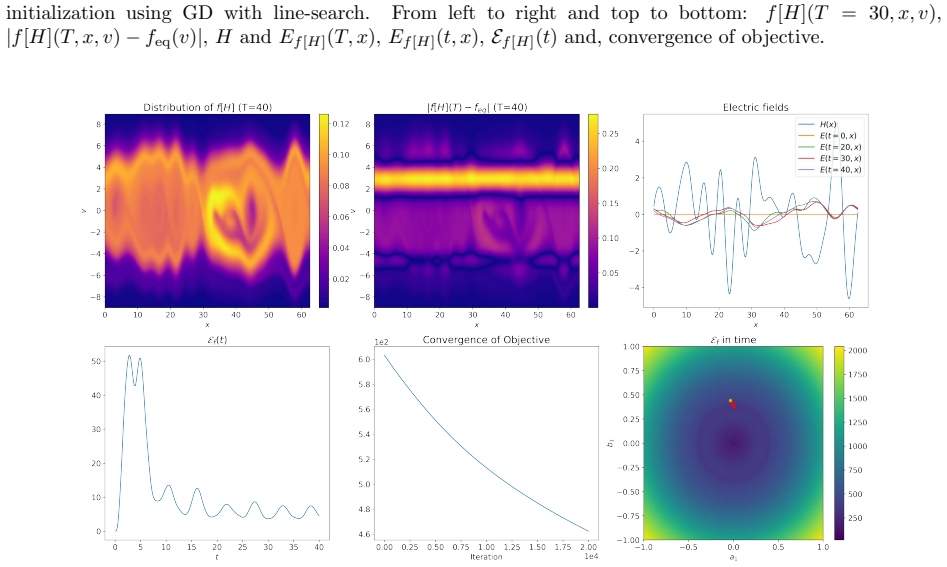
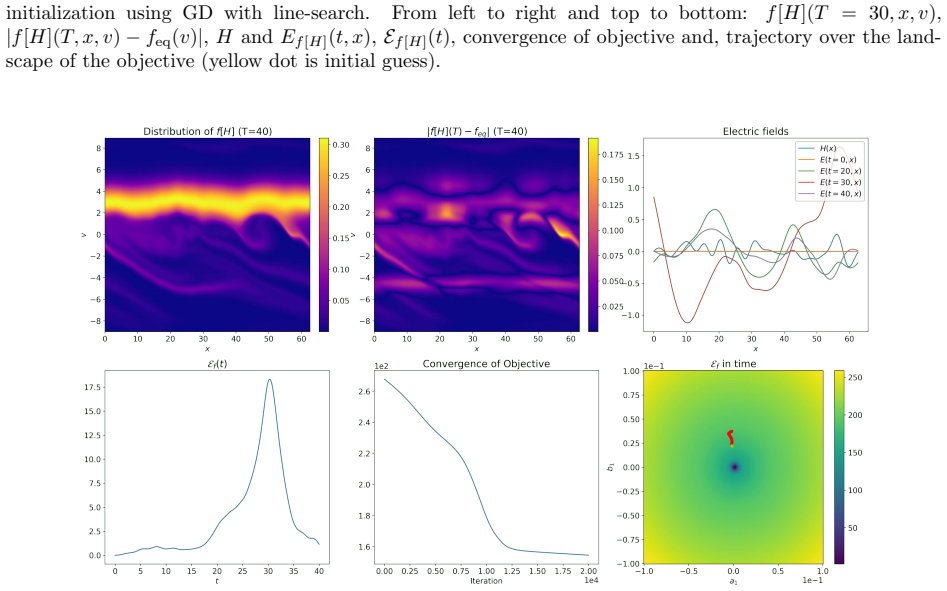
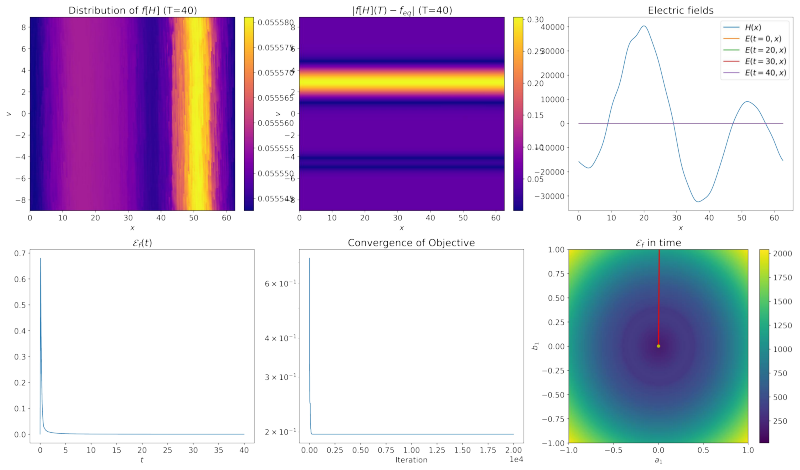
Analysis of the dispersion relation for the Vlasov-Poisson system yields parameter configurations that eliminate unstable modes and lie close to the global optimum, serving as effective initial guesses. Numerical experiments comparing objective functions show that different choices lead to similar stabilizing configurations, yet objectives that incorporate time-integrated information exhibit more convex-like landscapes and are therefore more favorable for gradient-based optimization methods.
What carries the argument
PDE-constrained optimization of external electric fields, with objective functions evaluated through their resulting optimization landscapes and informed by dispersion relation analysis for initialization.
If this is right
- Dispersion analysis supplies initial guesses that lie close to the global optimum.
- Different objective functions converge to similar stabilizing parameter sets.
- Time-integrated objectives generate smoother landscapes that improve the performance of gradient descent.
- These landscape properties can guide the design of objective functions for optimization-based plasma control.
Where Pith is reading between the lines
- The same dispersion-based initialization strategy could be tested on other linear kinetic models before moving to nonlinear regimes.
- Precomputed spectral information might reduce the cost of real-time control loops if the underlying dynamics remain close to the linear regime.
- Extension to three-dimensional or multi-species plasmas would clarify whether the convexity benefit persists when the dispersion relation becomes more intricate.
Load-bearing premise
The optimization landscapes measured on the simplified Vlasov-Poisson system are representative of those that appear in the more complex kinetic plasma models used for actual fusion control.
What would settle it
A single optimization run on a higher-dimensional or nonlinear kinetic model in which a time-integrated objective produces a markedly non-convex landscape with many poor local minima would contradict the claimed advantage.
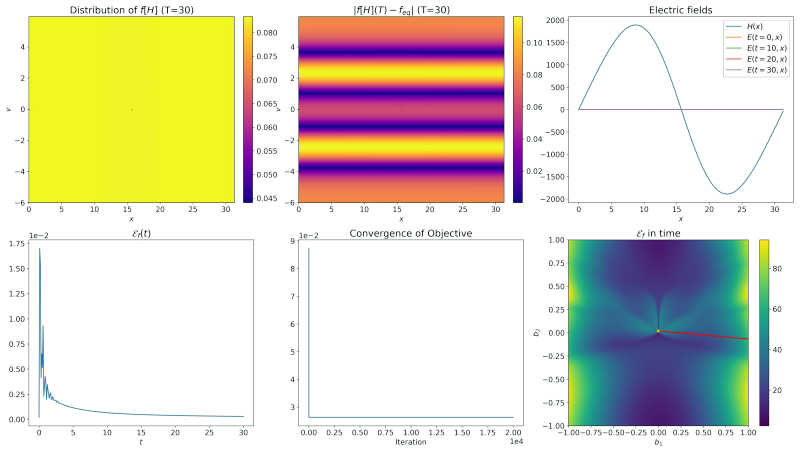
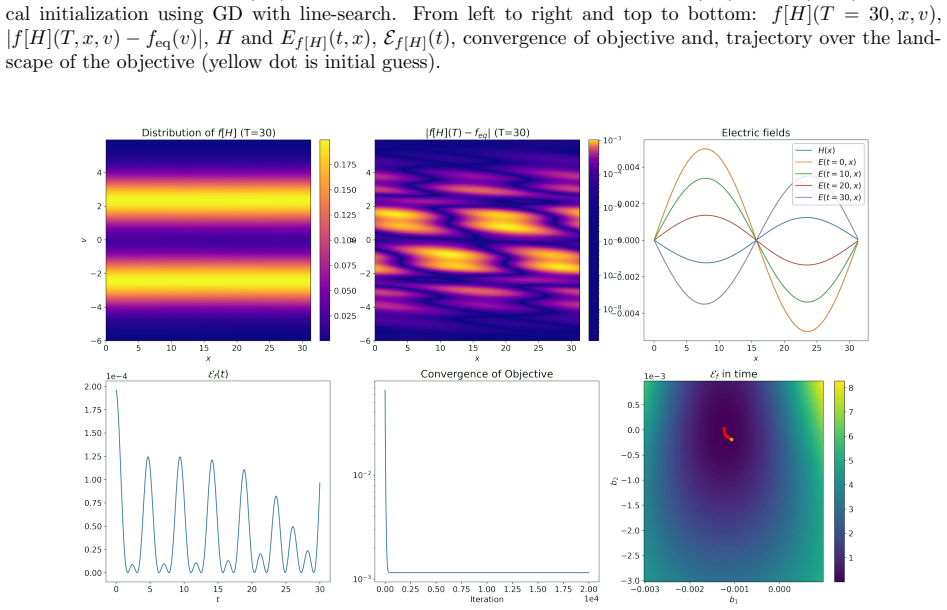
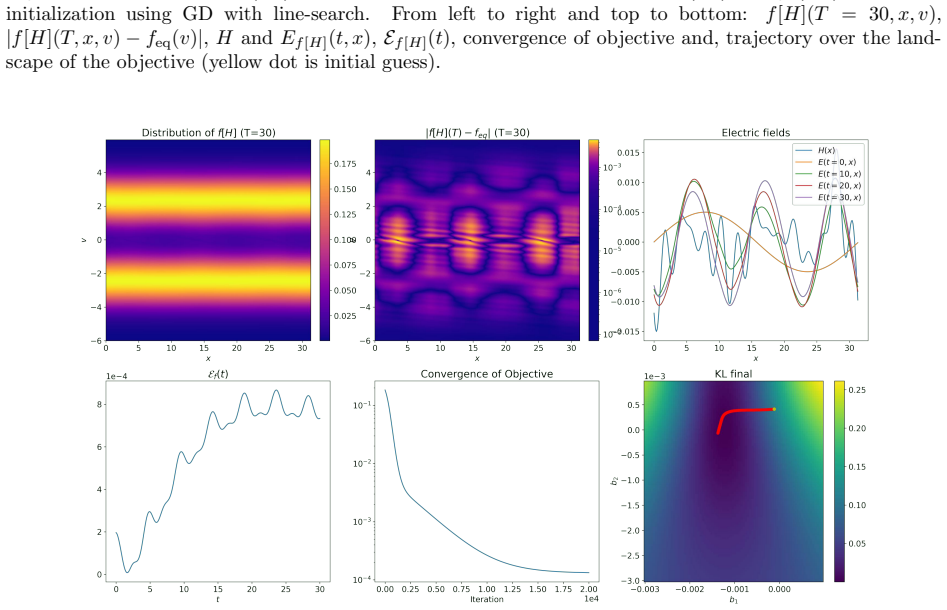
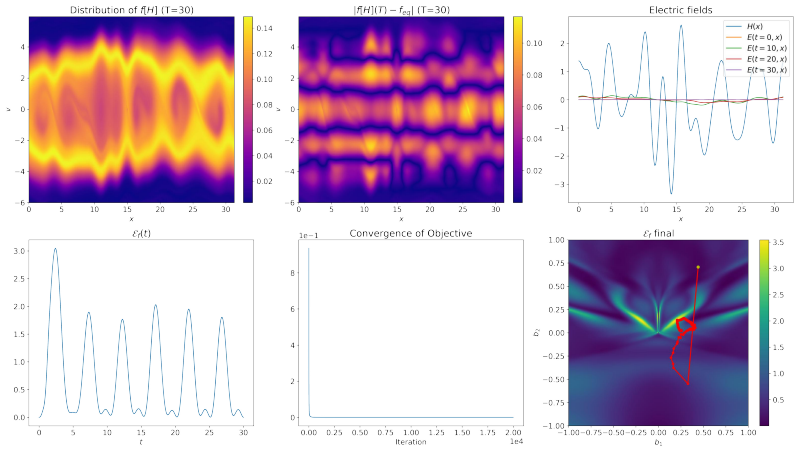
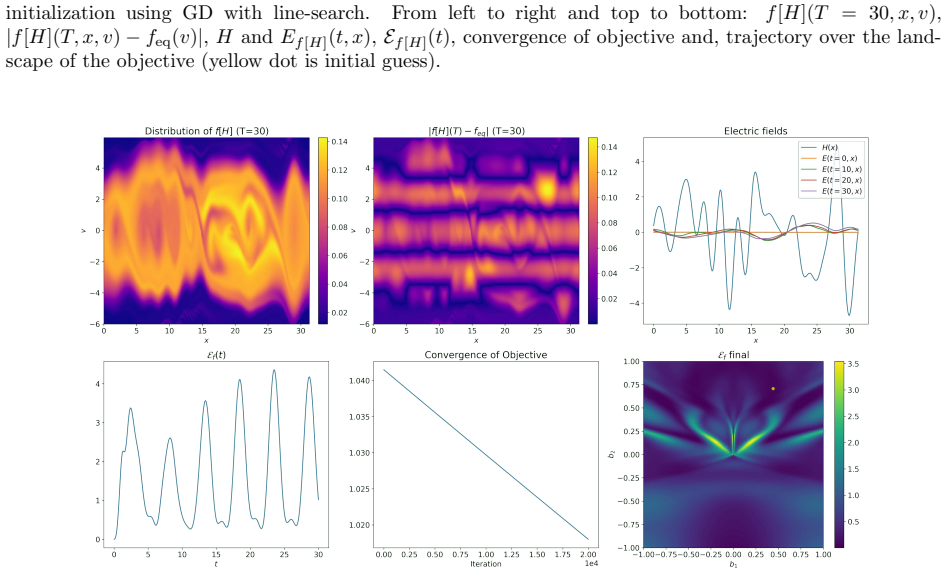
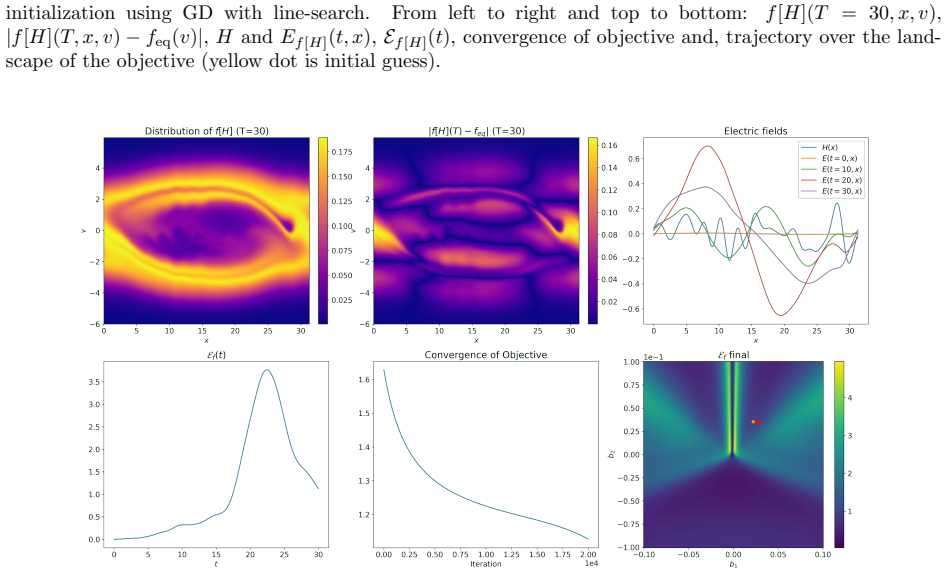
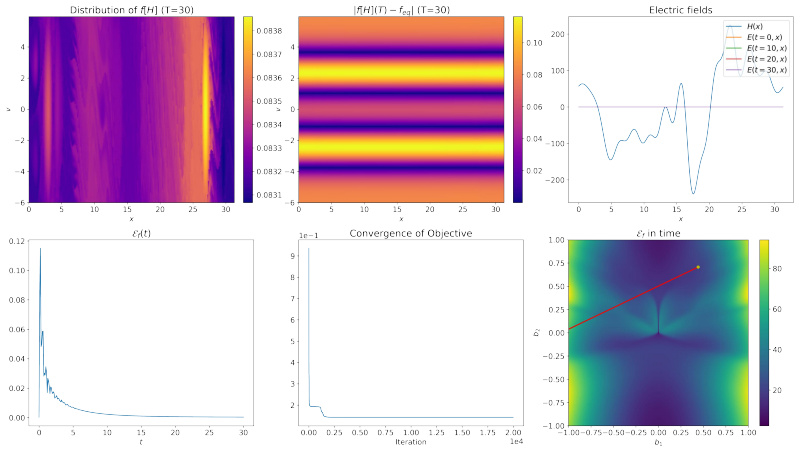
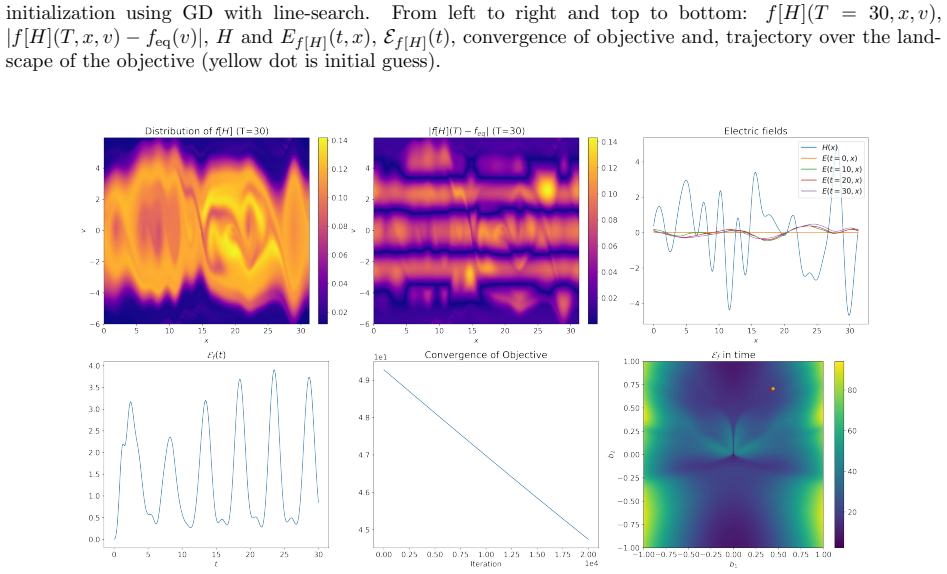
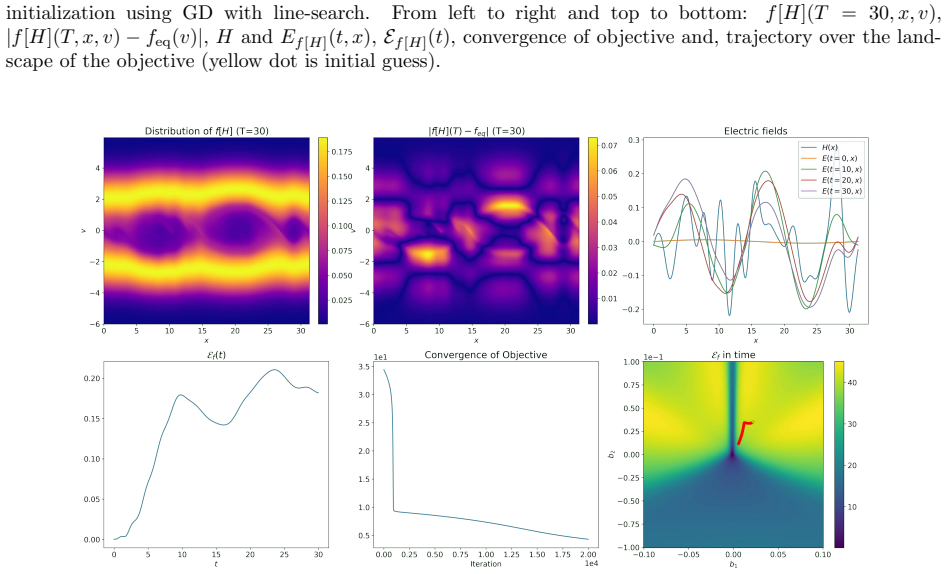
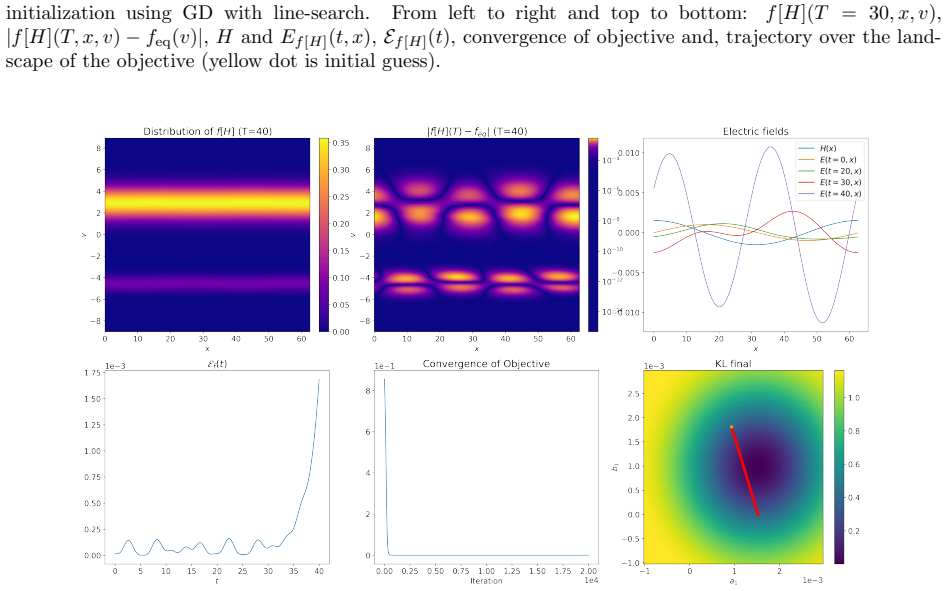
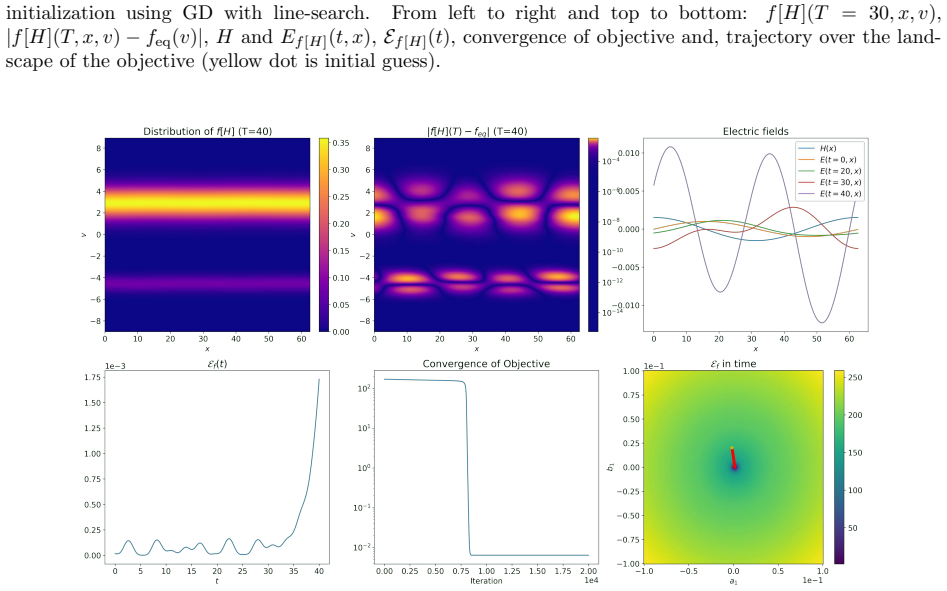
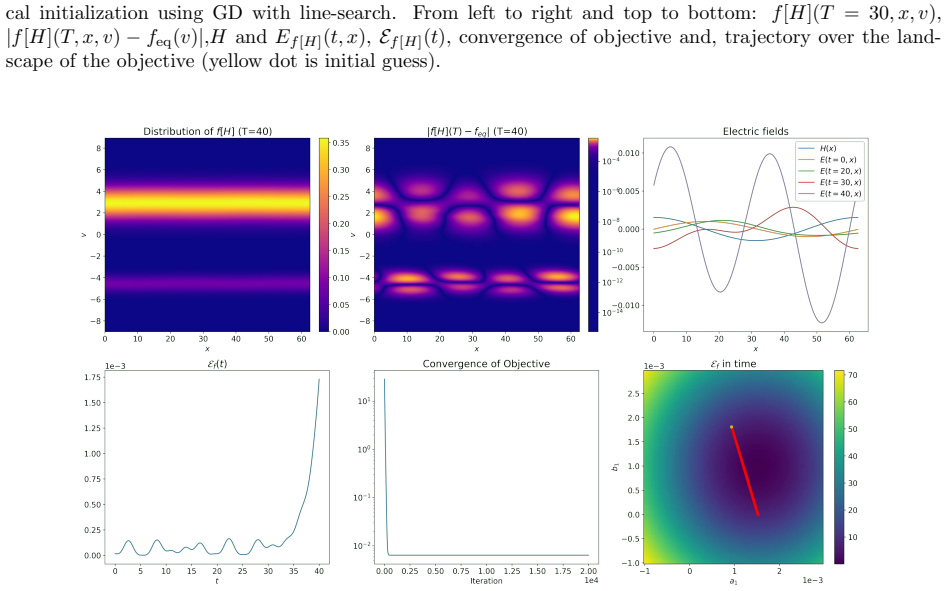
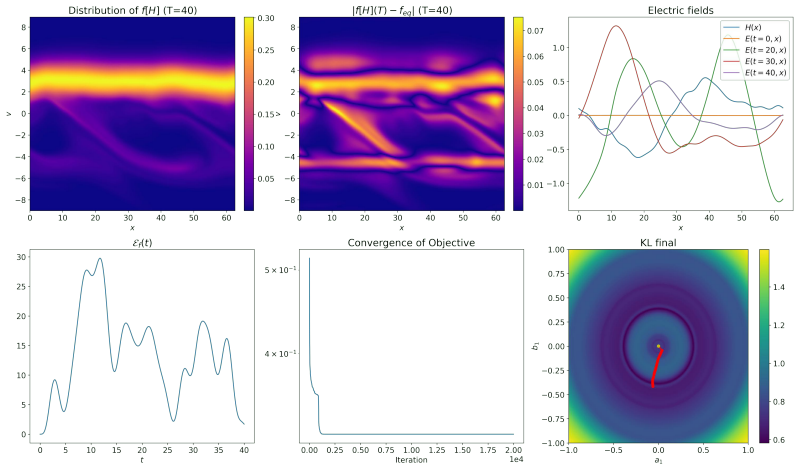
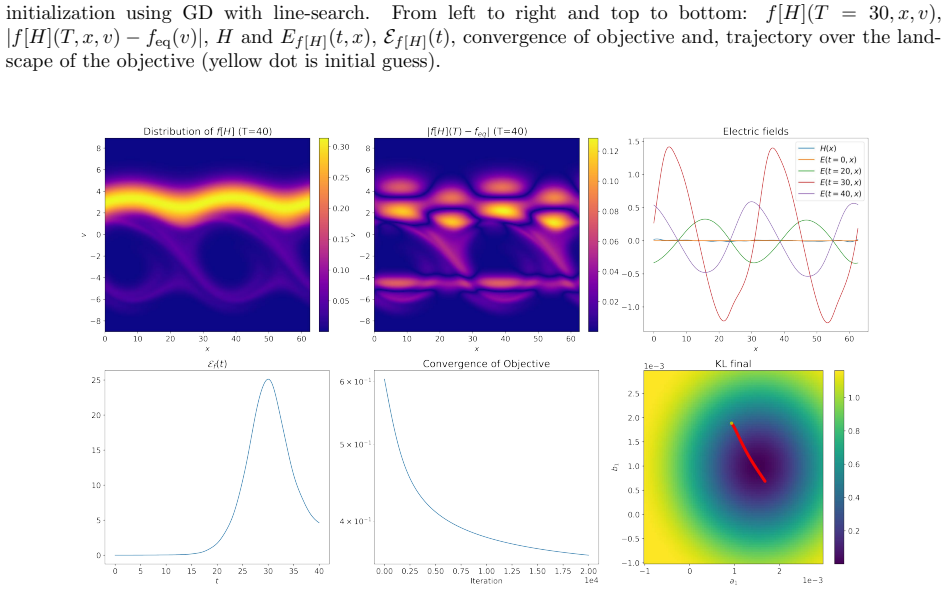
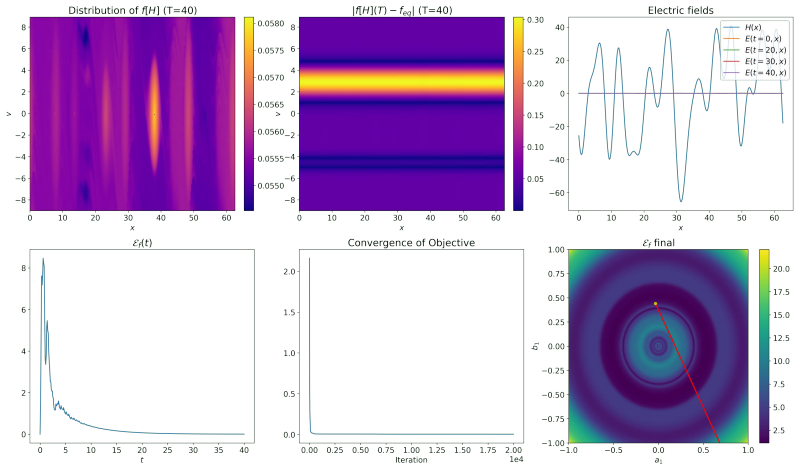
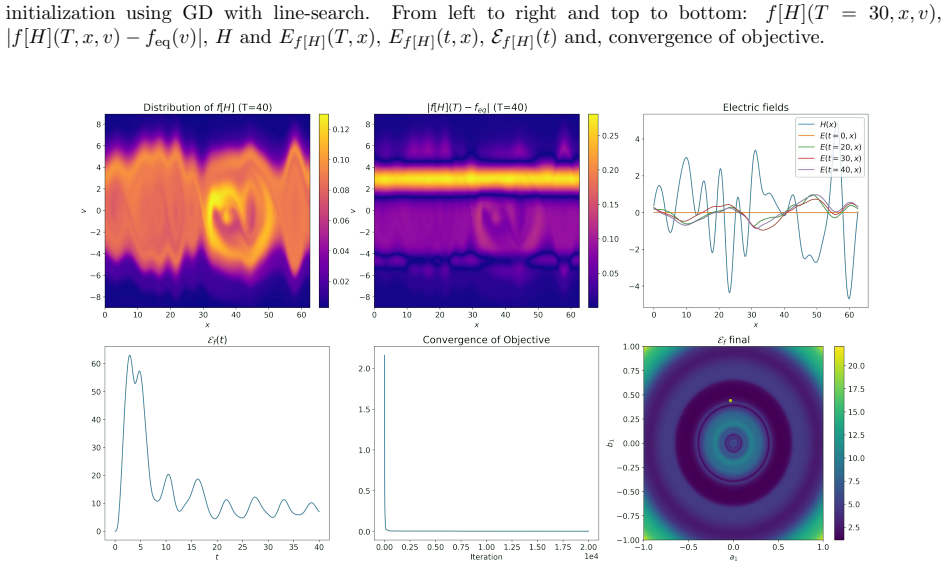
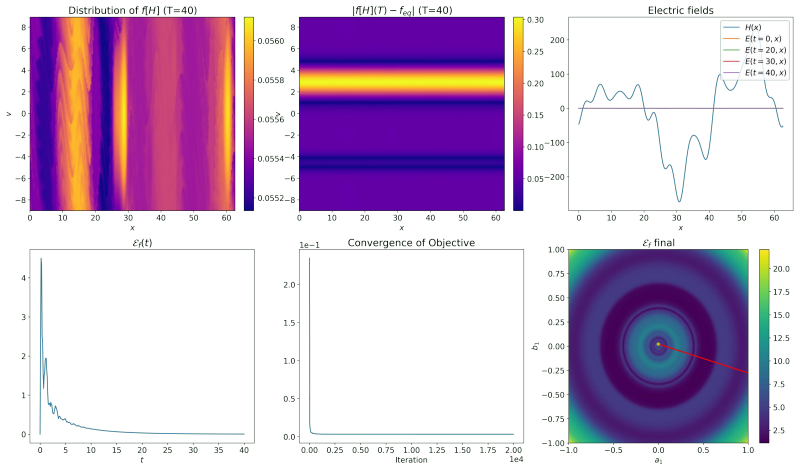
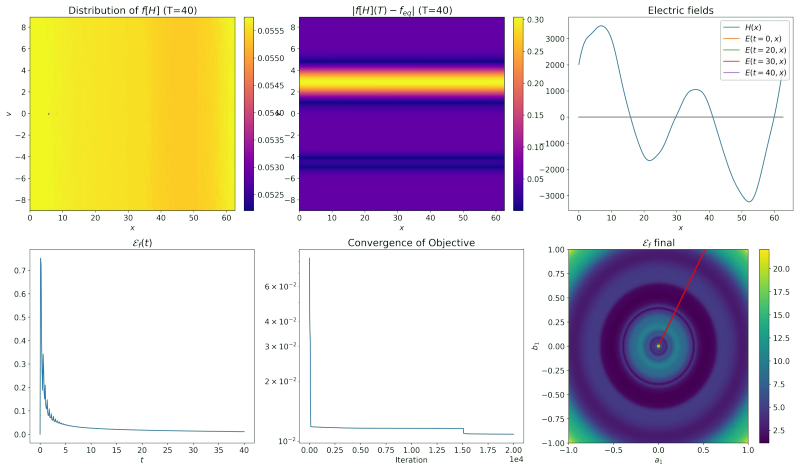
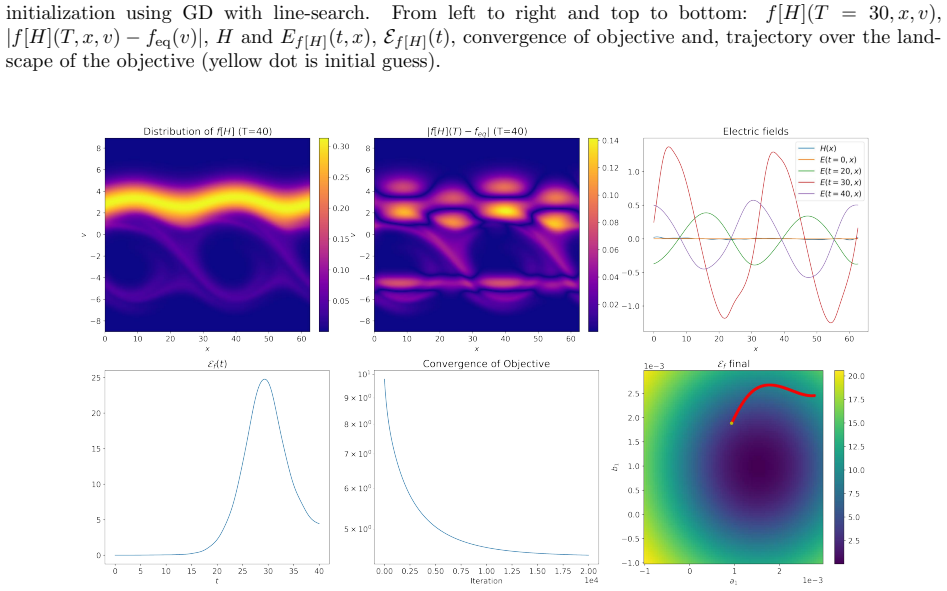
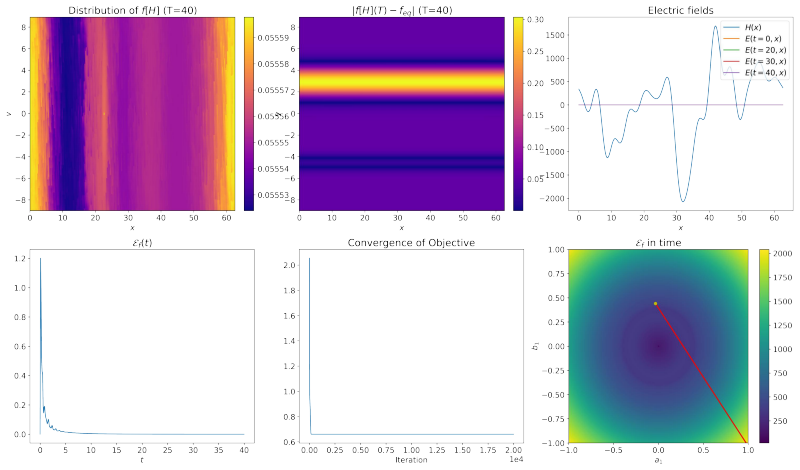
Figures
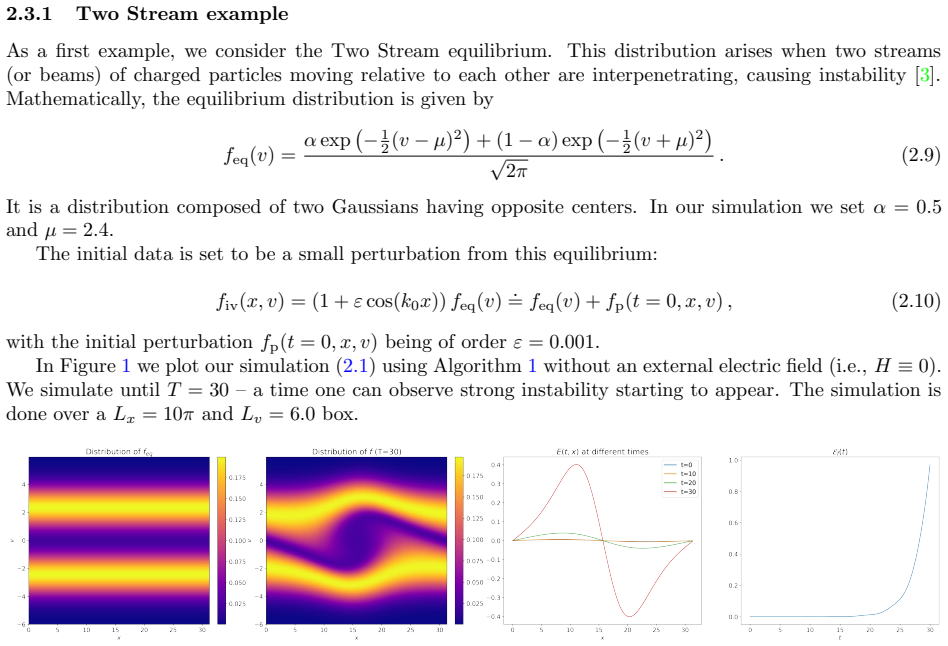


















































read the original abstract
Stabilizing plasma dynamics is a central challenge in magnetic confinement fusion. A common approach is to introduce external electric fields to suppress instabilities in the plasma distribution. However, efficiently identifying such stabilizing fields remains challenging, even for simplified kinetic models such as the Vlasov-Poisson (VP) system. In this work we study plasma stabilization from the perspective of PDE-constrained optimization. Our goal is to understand how the choice of objective function and the underlying kinetic dynamics influence the optimization landscape. First, we analyze the dispersion relation of the VP system and show that it reveals the spectral structure of the dynamics; eliminating unstable modes provides parameter configurations that lie close to the global optimum and serve as effective initial guesses for optimization. Second, we investigate several objective functions for stabilization and compare their optimization landscapes through numerical experiments. Our results show that while different objectives lead to similar stabilizing parameter configurations, objective functions incorporating time-integrated information exhibit more convex-like landscapes and are therefore more favorable for gradient-based optimization methods. These findings provide insight into the design of objective functions for optimization-based plasma control and suggest promising directions for future research on real-time stabilization of kinetic plasma models.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript studies PDE-constrained optimization for suppressing instabilities in the Vlasov-Poisson system via external electric fields. It first analyzes the dispersion relation to identify parameter values that eliminate unstable modes and provide effective initial guesses near the global optimum. It then compares several objective functions through numerical experiments on a simplified VP system, reporting that time-integrated objectives (e.g., integrals of norms or energy over [0,T]) produce more convex-like optimization landscapes than instantaneous ones and are therefore preferable for gradient-based methods.
Significance. If the numerical landscape comparison holds under rigorous quantification, the results would offer concrete guidance on objective-function design for optimization-based plasma control, with direct relevance to kinetic models in fusion research. The dispersion-relation analysis for generating high-quality initial guesses is a clear strength, as is the reproducible numerical comparison of multiple objectives on the same VP setup.
major comments (2)
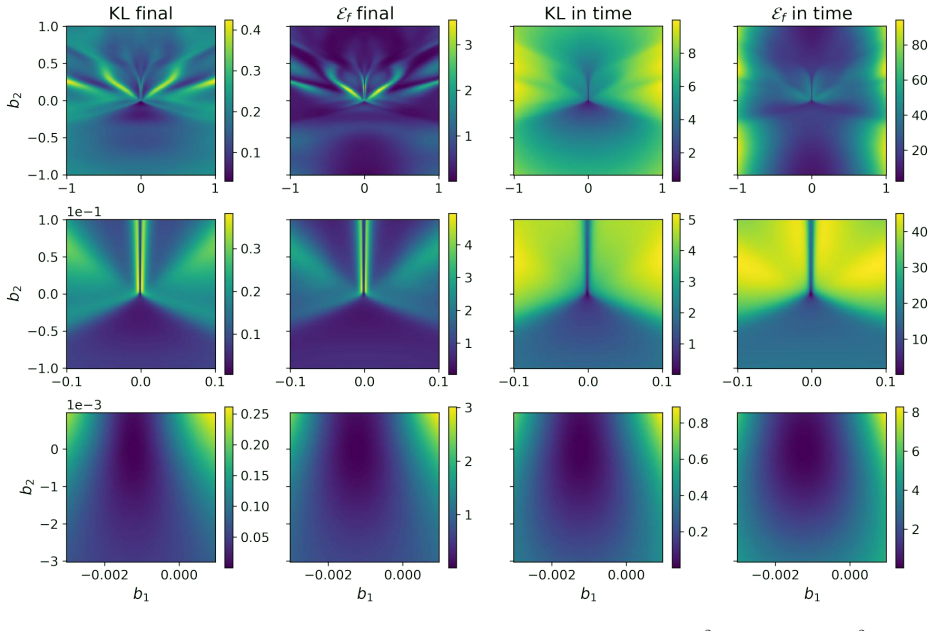
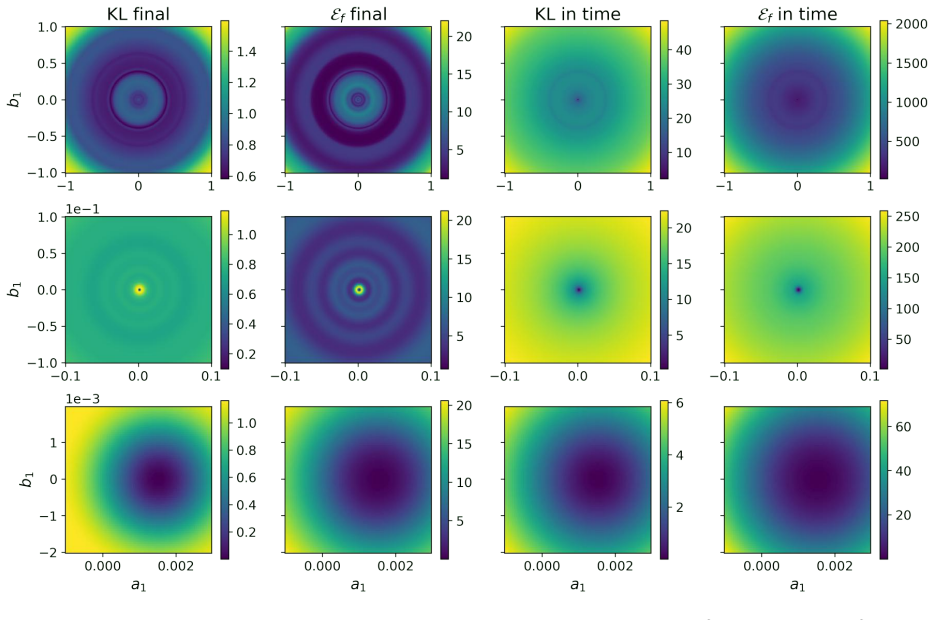
- [§4] §4 (Numerical Experiments): The central claim that time-integrated objectives yield more convex-like landscapes rests on qualitative visualization of optimization landscapes and the observation that stabilizing parameters are similar across objectives. No quantitative convexity metrics (Hessian condition numbers, sampled local-minima counts, or gradient-descent success rates from randomized starts) are reported, rendering the inference that these landscapes are 'more favorable for gradient-based optimization methods' interpretive rather than measured.
- [§4.1 and §4.2] §4.1 and §4.2: The description of the numerical experiments lacks explicit details on the spatial and velocity discretization of the VP system, the time-stepping scheme, error-control tolerances, and any statistical robustness checks (multiple independent runs or sensitivity to mesh parameters) used to support the convexity comparison. These omissions make it difficult to assess whether the reported landscape differences are robust or discretization artifacts.
minor comments (2)
- [§3] The mathematical definitions of the objective functions (instantaneous vs. time-integrated) would benefit from a single, clearly labeled subsection containing their explicit integral expressions and any regularization terms.
- [Figures 3-5] Figure captions for the landscape plots should state the precise parameter ranges, number of sampled points, and any smoothing applied, to allow readers to reproduce the visual comparison.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed review. We agree that strengthening the quantitative support for the landscape comparison and expanding the numerical details will improve the manuscript. We address each major comment below and indicate planned revisions.
read point-by-point responses
-
Referee: [§4] §4 (Numerical Experiments): The central claim that time-integrated objectives yield more convex-like landscapes rests on qualitative visualization of optimization landscapes and the observation that stabilizing parameters are similar across objectives. No quantitative convexity metrics (Hessian condition numbers, sampled local-minima counts, or gradient-descent success rates from randomized starts) are reported, rendering the inference that these landscapes are 'more favorable for gradient-based optimization methods' interpretive rather than measured.
Authors: We acknowledge that the evidence presented for more convex-like landscapes under time-integrated objectives is primarily qualitative, based on visual inspection of the objective surfaces and the consistency of stabilizing parameters across objectives. While these observations support our interpretation, we agree that quantitative metrics would make the claim more rigorous. In the revised manuscript we will add success rates of gradient descent from multiple randomized initial guesses and counts of distinct local minima encountered across repeated optimizations. Full Hessian condition numbers remain computationally expensive for the PDE-constrained setting, but we will include finite-difference estimates of local curvature at sampled points to provide additional quantitative support. revision: yes
-
Referee: [§4.1 and §4.2] §4.1 and §4.2: The description of the numerical experiments lacks explicit details on the spatial and velocity discretization of the VP system, the time-stepping scheme, error-control tolerances, and any statistical robustness checks (multiple independent runs or sensitivity to mesh parameters) used to support the convexity comparison. These omissions make it difficult to assess whether the reported landscape differences are robust or discretization artifacts.
Authors: We thank the referee for highlighting these omissions. In the revised version we will expand Sections 4.1 and 4.2 with complete specifications of the spatial and velocity grids (including point counts and domain sizes), the time-stepping scheme and splitting method used for the Vlasov-Poisson system, the error tolerances applied, and results from multiple independent runs with varied random seeds. We will also report a brief mesh-sensitivity study to confirm that the observed differences between objective landscapes persist under refinement and are not discretization artifacts. revision: yes
Circularity Check
No significant circularity; claims rest on independent analysis and experiments.
full rationale
The paper derives its conclusions from two independent sources: (1) standard dispersion-relation analysis of the Vlasov-Poisson system that identifies unstable modes and supplies initial guesses near the optimum, and (2) direct numerical optimization experiments that compare landscapes for instantaneous versus time-integrated objective functions. Neither step reduces by construction to a fitted parameter, a self-citation chain, or a renaming of the input; the dispersion relation is an external spectral property, and the landscape comparison is obtained from fresh simulations rather than from quantities defined in terms of the claimed result. The derivation is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Vlasov-Poisson system is an adequate reduced model for studying external-field stabilization of plasma instabilities.
Reference graph
Works this paper leans on
-
[1]
Instantaneous control strategies for magnetically confined fusion plasma
Giacomo Albi, Giacomo Dimarco, Federica Ferrarese, and Lorenzo Pareschi. “Instantaneous control strategies for magnetically confined fusion plasma”. In: Journal of Computational Physics 527 (2025), p. 113804. issn: 0021-9991. doi: 10.1016/j.jcp.2025.113804 . url: https://www.sciencedirect. com/science/article/pii/S0021999125000877
-
[2]
Robust feedback control of collisional plasma dynamics in presence of uncertainties
Giacomo Albi, Giacomo Dimarco, Federica Ferrarese, and Lorenzo Pareschi. Robust feedback control of collisional plasma dynamics in presence of uncertainties . 2025. arXiv: 2505.19992 [math.NA] . url: https://arxiv.org/abs/2505.19992
-
[3]
A tutorial presentation of the two stream instability and Landau damping
D. Anderson, R. Fedele, and M. Lisak. “A tutorial presentation of the two stream instability and Landau damping”. In: American Journal of Physics (2001). doi: 10.1119/1.1407252
-
[4]
Controlling a Vlasov–Poisson Plasma by a Particle-in-Cell Method Based on a Monte Carlo Framework
Jan Bartsch, Patrik Knopf, Stefania Scheurer, and J¨ org Weber. “Controlling a Vlasov–Poisson Plasma by a Particle-in-Cell Method Based on a Monte Carlo Framework”. In: SIAM Journal on Control and Optimization 62.4 (2024), pp. 1977–2011. doi: 10.1137/23M1563852
-
[5]
Semi-Lagrangian schemes for the Vlasov equation on an unstructured mesh of phase space
N. Besse and E. Sonnendr¨ ucker. “Semi-Lagrangian schemes for the Vlasov equation on an unstructured mesh of phase space”. In: Journal of Computational Physics 191.2 (2003), pp. 341–376. issn: 0021-
work page 2003
-
[6]
The weak and strong Lefschetz properties for ArtinianK-algebras
doi: 10.1016/S0021- 9991(03)00318- 8 . url: https://www.sciencedirect.com/science/ article/pii/S0021999103003188
-
[7]
Modeling of active control of external magnetohydrodynamic instabilities
James Bialek, Allen H. Boozer, M. E. Mauel, and G. A. Navratil. “Modeling of active control of external magnetohydrodynamic instabilities”. In: Physics of Plasmas 8.5 (May 2001), pp. 2170–2180. issn: 1070-664X. doi: 10 . 1063 / 1 . 1362532. url: https : / / pubs . aip . org / aip / pop / article - pdf/8/5/2170/19187304/2170%5C_1%5C_online.pdf
work page 2001
-
[8]
Control Methods for the Opti- mization of Plasma Scenarios in a Tokamak
Jacques Blum, C´ edric Boulbe, Blaise Faugeras, and Holger Heumann. “Control Methods for the Opti- mization of Plasma Scenarios in a Tokamak”. In:IFIP TC7 2015 - 27th Conference on System Modeling and Optimization. Ed. by Lorena Bociu, Jean-Antoine D´ esid´ eri, and Abderrahmane Habbal. Springer International Publishing, 2016, pp. 1–20. isbn: 978-3-319-55...
-
[9]
Optimal Design of Equilibrium Solutions of the Vlasov–Poisson System by an External Electric Field
A. Borz` ı, G. Infante, and G. Mascali. “Optimal Design of Equilibrium Solutions of the Vlasov–Poisson System by an External Electric Field”. In:SIAM Journal on Applied Mathematics 85.1 (2025), pp. 143–
work page 2025
-
[10]
doi: 10.1137/24M1643177
-
[11]
JAX: composable transformations of Python+NumPy programs
James Bradbury et al. JAX: composable transformations of Python+NumPy programs . Version 0.6.0
-
[12]
url: http://github.com/jax-ml/jax
-
[13]
Plasma: The Fourth State of Matter
KTAL Burm. “Plasma: The Fourth State of Matter”. In: Plasma Chemistry and Plasma Processing 32.2 (2012), pp. 401–407. doi: 10.1007/s11090-012-9356-1
-
[14]
Xiaofeng Cai, Sebastiano Boscarino, and Jing-Mei Qiu. “High order semi-Lagrangian discontinuous Galerkin method coupled with Runge-Kutta exponential integrators for nonlinear Vlasov dynamics”. In: Journal of Computational Physics 427 (2021), p. 110036. issn: 0021-9991. doi: 10.1016/j.jcp. 2020.110036. url: https://www.sciencedirect.com/science/article/pii...
-
[15]
Introduction to plasma physics and controlled fusion
Francis F Chen. Introduction to plasma physics and controlled fusion . Vol. 1. Springer, 1984. doi: 10.1007/978-1-4757-5595-4
-
[16]
Shi Chen, Zhiyan Ding, Qin Li, and Leonardo Zepeda-N´ u˜ nez. “High-Frequency Limit of the Inverse Scattering Problem: Asymptotic Convergence from Inverse Helmholtz to Inverse Liouville”. In: SIAM Journal on Imaging Sciences 16.1 (2023), pp. 111–143. doi: 10.1137/22M147075X
-
[17]
The integration of the Vlasov equation in configuration space
Chio-Zong Cheng and Georg Knorr. “The integration of the Vlasov equation in configuration space”. In: Journal of Computational Physics 22.3 (1976), pp. 330–351. issn: 0021-9991. doi: 10 . 1016 / 0021 - 9991(76 ) 90053 - X. url: https : / / www . sciencedirect . com / science / article / pii / 002199917690053X
work page 1976
-
[18]
Discontinuous Galerkin semi-Lagrangian method for Vlasov-Poisson
N. Crouseilles, M. Mehrenberger, and Vecil, F. “Discontinuous Galerkin semi-Lagrangian method for Vlasov-Poisson”. In: ESAIM: Proc. 32 (2011), pp. 211–230. doi: 10.1051/proc/2011022. 19
-
[19]
Magnetic control of tokamak plasmas through deep reinforcement learning
Jonas Degrave et al. “Magnetic control of tokamak plasmas through deep reinforcement learning”. In: Nature 602.7897 (2022), pp. 414–419. doi: 10.1038/s41586-021-04301-9
-
[20]
Lukas Einkemmer. “A performance comparison of semi-Lagrangian discontinuous Galerkin and spline based Vlasov solvers in four dimensions”. In: Journal of Computational Physics 376 (2019), pp. 937–
work page 2019
-
[21]
doi: 10.1016/j.jcp.2018.10.012
issn: 0021-9991. doi: 10.1016/j.jcp.2018.10.012 . url: https://www.sciencedirect.com/ science/article/pii/S0021999118306697
-
[22]
Control of instability in a Vlasov- Poisson system through an external electric field
Lukas Einkemmer, Qin Li, Cl´ ement Mouhot, and Yukun Yue. “Control of instability in a Vlasov- Poisson system through an external electric field”. In: Journal of Computational Physics 530 (2025), p. 113904. issn: 0021-9991. doi: 10.1016/j.jcp.2025.113904 . url: https://www.sciencedirect. com/science/article/pii/S0021999125001871
-
[23]
Lukas Einkemmer, Qin Li, Li Wang, and Yang Yunan. “Suppressing instability in a Vlasov–Poisson system by an external electric field through constrained optimization”. In: Journal of Computational Physics 498 (2024), p. 112662. issn: 0021-9991. doi: 10.1016/j.jcp.2023.112662 . url: https: //www.sciencedirect.com/science/article/pii/S002199912300757X
-
[24]
Optimal Transport Based Seismic Inversion:Beyond Cycle Skip- ping
Bj¨ orn Engquist and Yunan Yang. “Optimal Transport Based Seismic Inversion:Beyond Cycle Skip- ping”. In: Communications on Pure and Applied Mathematics 75.10 (2022), pp. 2201–2244. doi: 10.1002/cpa.21990. url: https://onlinelibrary.wiley.com/doi/abs/10.1002/cpa.21990
-
[25]
Comparison of Eulerian Vlasov solvers
Francis Filbet and Eric Sonnendr¨ ucker. “Comparison of Eulerian Vlasov solvers”. In:Computer Physics Communications 150.3 (2003), pp. 247–266. issn: 0010-4655. doi: 10.1016/S0010-4655(02)00694-X. url: https://www.sciencedirect.com/science/article/pii/S001046550200694X
-
[26]
Numerical methods for the Vlasov equation
Francis Filbet and Eric Sonnendr¨ ucker. “Numerical methods for the Vlasov equation”. In: Numerical Mathematics and Advanced Applications: Proceedings of ENUMATH 2001 the 4th European Conference on Numerical Mathematics and Advanced Applications Ischia, July 2001. Springer Milan, 2003, pp. 459–
work page 2001
-
[27]
doi: 10.1007/978-88-470-2089-4_43
isbn: 978-88-470-2089-4. doi: 10.1007/978-88-470-2089-4_43
-
[28]
Plasma physics: an introduction
Richard Fitzpatrick. Plasma physics: an introduction. 2nd edition. CRC Press, Taylor & Francis Group,
-
[29]
isbn: 978-1-4665-9426-5. doi: 10.1201/9781003268253
-
[30]
Plasma: the fourth state of matter
D Frank-Kamenetskii. Plasma: the fourth state of matter . Springer Science & Business Media, 2012. doi: 10.1007/978-1-4684-1896-5
-
[31]
Jeffrey P. Freidberg. Plasma Physics and Fusion Energy . Cambridge University Press, 2007. isbn: 9780511755705. doi: 10.1017/CBO9780511755705
-
[32]
On the controllability of the Vlasov–Poisson system
Olivier Glass. “On the controllability of the Vlasov–Poisson system”. In: Journal of Differential Equa- tions 195.2 (2003), pp. 332–379. issn: 0022-0396. doi: 10 . 1016 / S0022 - 0396(03 ) 00066 - 4. url: https://www.sciencedirect.com/science/article/pii/S0022039603000664
work page 2003
-
[33]
On the controllability of the Vlasov–Poisson system in the presence of external force fields
Olivier Glass and Daniel Han-Kwan. “On the controllability of the Vlasov–Poisson system in the presence of external force fields”. In: Journal of Differential Equations 252.10 (2012), pp. 5453–5491. issn: 0022-0396. doi: 10 . 1016 / j . jde . 2012 . 02 . 007. url: https : / / www . sciencedirect . com / science/article/pii/S0022039612000848
work page 2012
-
[34]
Daniel Han-Kwan, Toan T. Nguyen, and Fr´ ed´ eric Rousset. “Asymptotic Stability of Equilibria for Screened Vlasov–Poisson Systems via Pointwise Dispersive Estimates”. In: Annals of PDE 7.2 (2021), Paper No. 18, 37 pp. doi: 10.1007/s40818-021-00110-5
-
[35]
Nonlinear stability of fluid and plasma equilibria
Darryl D. Holm, Jerrold E. Marsden, Tudor Ratiu, and Alan Weinstein. “Nonlinear stability of fluid and plasma equilibria”. In: Physics Reports 123.1 (1985), pp. 1–116. issn: 0370-1573. doi: 10.1016/ 0370 - 1573(85 ) 90028 - 6. url: https : / / www . sciencedirect . com / science / article / pii / 0370157385900286
work page 1985
-
[36]
Nuclear fusion in dense plasmas
Setsuo Ichimaru. “Nuclear fusion in dense plasmas”. In: Reviews of Modern Physics 65.2 (1993), pp. 255–299. doi: 10 . 1103 / RevModPhys . 65 . 255. url: https : / / link . aps . org / doi / 10 . 1103 / RevModPhys.65.255
work page 1993
-
[37]
Dynamic stabilization of plasma instability
S. Kawata, T. Karino, and Y.J. Gu. “Dynamic stabilization of plasma instability”. In: High Power Laser Science and Engineering 7 (2019), e3. doi: 10.1017/hpl.2018.61. 20
-
[38]
A Splitting Algorithm for Vlasov Simulation with Filamentation Filtration
A.J. Klimas and W.M. Farrell. “A Splitting Algorithm for Vlasov Simulation with Filamentation Filtration”. In: Journal of Computational Physics 110.1 (1994), pp. 150–163. issn: 0021-9991. doi: 10 . 1006 / jcph . 1994 . 1011. url: https : / / www . sciencedirect . com / science / article / pii / S0021999184710114
work page 1994
-
[39]
Absence of recurrence in Fourier–Fourier transformed Vlasov–Poisson simulations
Alexander J. Klimas and Adolfo. F. Vi˜ nas. “Absence of recurrence in Fourier–Fourier transformed Vlasov–Poisson simulations”. In: Journal of Plasma Physics 84.4 (2018), p. 905840405. doi: 10.1017/ S0022377818000776
work page 2018
-
[40]
Confined steady states of a Vlasov-Poisson plasma in an infinitely long cylinder
Patrik Knopf. “Confined steady states of a Vlasov-Poisson plasma in an infinitely long cylinder”. In: Mathematical Methods in the Applied Sciences 42.18 (2019), pp. 6369–6384. doi: 10.1002/mma.5728. url: https://onlinelibrary.wiley.com/doi/abs/10.1002/mma.5728
-
[41]
Optimal control of a Vlasov–Poisson plasma by an external magnetic field
Patrik Knopf. “Optimal control of a Vlasov–Poisson plasma by an external magnetic field”. In: Calculus of Variations and Partial Differential Equations 57.5 (2018). doi: 10.1007/s00526-018-1407-x
-
[42]
Patrik Knopf and J¨ org Weber. “Optimal Control of a Vlasov–Poisson Plasma by Fixed Magnetic Field Coils”. In: Applied Mathematics & Optimization 81.3 (2020), pp. 961–988. doi: 10.1007/s00245- 018-9526-5
-
[43]
Plasma Physics for Nuclear Fusion
Kenro Miyamoto. Plasma Physics for Nuclear Fusion . Revised Ed. The MIT Press, 1989. isbn: 978-0- 26-263117-4
work page 1989
-
[44]
Magnetic measurements on the TCV Tokamak
J.-M. Moret et al. “Magnetic measurements on the TCV Tokamak”. In: Review of Scientific Instruments 69.6 (June 1998), pp. 2333–2348. issn: 0034-6748. doi: 10.1063/1.1148940 . url: https://pubs. aip.org/aip/rsi/article-pdf/69/6/2333/19105874/2333%5C_1%5C_online.pdf
-
[45]
Cl´ ement Mouhot and C´ edric Villani. “On Landau damping”. In: Acta Mathematica 207.1 (2011), pp. 29–201. doi: 10.1007/s11511-011-0068-9
-
[46]
Dwight Roy Nicholson. Introduction to plasma theory . Vol. 1. Wiley New York, 1983
work page 1983
-
[47]
Jorge Nocedal and Stephen J. Wright. Numerical Optimization. Springer Series in Operations Research and Financial Engineering. 2nd Ed. New York, NY: Springer, 2006. isbn: 978-0-387-30303-1. doi: 10.1007/978-0-387-40065-5
-
[48]
Nonlinear interaction of a small cold beam and a plasma
T.M. O’Neil, J.H. Winfrey, and J.H. Malmberg. “Nonlinear interaction of a small cold beam and a plasma”. In: The Physics of Fluids 14.6 (1971), pp. 1204–1212. doi: 10.1063/1.1693587
-
[49]
Electrostatic instabilities of a uniform non-Maxwellian plasma
Oliver Penrose. “Electrostatic instabilities of a uniform non-Maxwellian plasma”. In: The Physics of Fluids 3.2 (1960), pp. 258–265. doi: 10.1063/1.1706024
-
[50]
Jing-Mei Qiu and Chi-Wang Shu. “Positivity preserving semi-Lagrangian discontinuous Galerkin for- mulation: theoretical analysis and application to the Vlasov–Poisson system”. In: Journal of Compu- tational Physics 230.23 (2011), pp. 8386–8409. doi: 10.1016/j.jcp.2011.07.018
-
[51]
James A. Rossmanith and David C. Seal. “A positivity-preserving high-order semi-Lagrangian dis- continuous Galerkin scheme for the Vlasov–Poisson equations”. In: Journal of Computational Physics 230.16 (2011), pp. 6203–6232. issn: 0021-9991. doi: 10 . 1016 / j . jcp . 2011 . 04 . 018. url: https : //www.sciencedirect.com/science/article/pii/S0021999111002579
work page 2011
-
[52]
Avoiding fusion plasma tearing instability with deep reinforcement learning
Jaemin Seo et al. “Avoiding fusion plasma tearing instability with deep reinforcement learning”. In: Nature 626.8000 (2024), pp. 746–751. doi: 10.1038/s41586-024-07024-9
-
[53]
Multimodal Prediction of Tearing Instabilities in a Tokamak
Jaemin Seo et al. “Multimodal Prediction of Tearing Instabilities in a Tokamak”. In: 2023 International Joint Conference on Neural Networks (IJCNN). 2023, pp. 1–8. isbn: 978-1-6654-8867-9. doi: 10.1109/ IJCNN54540.2023.10191359
-
[54]
The semi-Lagrangian method for the numerical resolution of the Vlasov equation
Eric Sonnendr¨ ucker, Jean Roche, Pierre Bertrand, and Alain Ghizzo. “The semi-Lagrangian method for the numerical resolution of the Vlasov equation”. In: Journal of Computational Physics 149.2 (1999), pp. 201–220. doi: 10.1006/jcph.1998.6148 . url: https://www.sciencedirect.com/science/ article/pii/S0021999198961484
-
[55]
Magnetic control of magnetohydrodynamic instabilities in tokamaks
E. J. Strait. “Magnetic control of magnetohydrodynamic instabilities in tokamaks”. In: Physics of Plasmas 22.2 (Nov. 2014), p. 021803. issn: 1070-664X. doi: 10 . 1063 / 1 . 4902126. url: https : //pubs.aip.org/aip/pop/article- pdf/doi/10.1063/1.4902126/16137245/021803%5C_1%5C_ online.pdf. 21
-
[56]
Velocity inversion by differential semblance optimization
W. W. Symes and J. J. Carazzone. “Velocity inversion by differential semblance optimization”. In: GEOPHYSICS 56.5 (1991), pp. 654–663. doi: 10.1190/1.1443082 . url: https://library.seg. org/doi/10.1190/1.1443082
-
[57]
Particle simulation of plasmas: review and advances
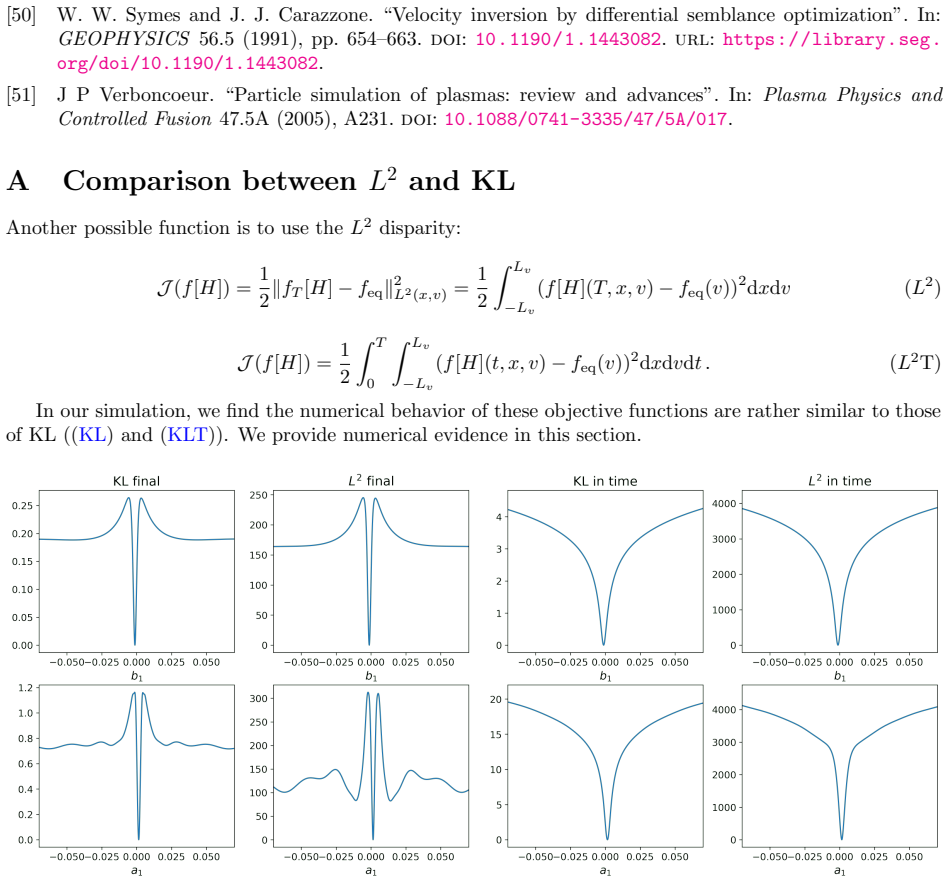
J P Verboncoeur. “Particle simulation of plasmas: review and advances”. In: Plasma Physics and Controlled Fusion 47.5A (2005), A231. doi: 10.1088/0741-3335/47/5A/017. A Comparison between L2 and KL Another possible function is to use the L2 disparity: J (f[H]) = 1 2 ∥fT [H] − feq∥2 L2(x,v) = 1 2 Z Lv −Lv (f[H](T, x, v) − feq(v))2dxdv (L2) J (f[H]) = 1 2 Z...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.