K2MUSE: A human lower-limb multimodal walking dataset spanning task and acquisition variability for rehabilitation robotics
Pith reviewed 2026-05-22 19:21 UTC · model grok-4.3
The pith
K2MUSE provides multimodal lower-limb walking data from young and older adults across speeds, inclines, and non-ideal sensor conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
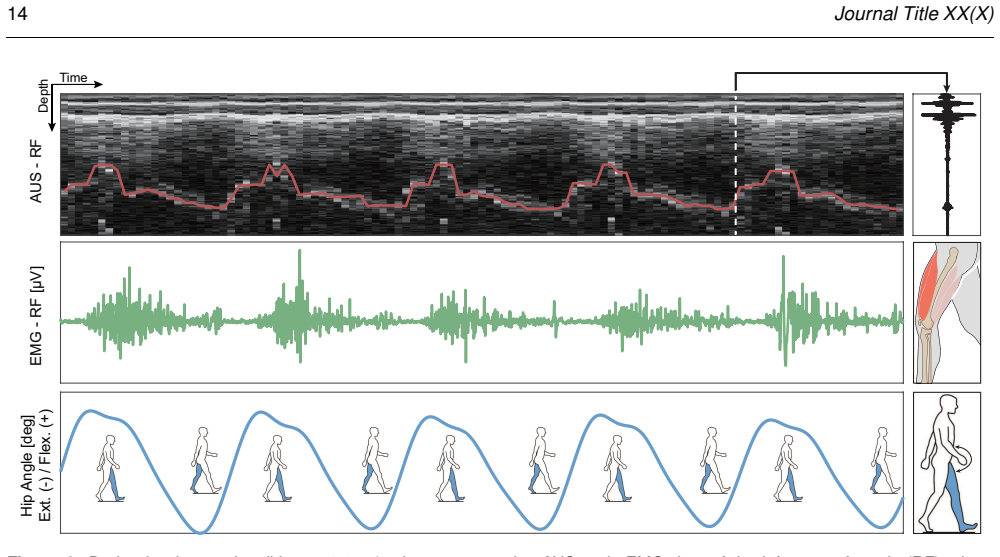
The K2MUSE dataset comprises lower-limb multimodal recordings from 30 young adults and 12 older adults, including kinematic and kinetic data from a Vicon system and instrumented treadmill together with sEMG and AUS signals from thirteen bilateral muscles, captured across inclines of 0°, ±5°, and ±10°, speeds of 0.5 m/s, 1.0 m/s, and 1.5 m/s, and representative non-ideal conditions of muscle fatigue, electrode shifts, and interday differences.
What carries the argument
The K2MUSE dataset itself, a synchronized collection of kinematic, kinetic, sEMG, and amplitude-mode ultrasound measurements gathered under controlled task and acquisition variability.
If this is right
- Supports training of data-driven controllers that maintain performance when sEMG electrodes shift or muscles fatigue during prolonged sessions.
- Enables direct comparison of gait patterns between young and older adults on the same inclines and speeds.
- Supplies benchmark recordings for testing wearable-sensor algorithms that must tolerate interday signal changes.
- Provides synchronized ground-truth labels for developing fusion methods that combine ultrasound imaging with electromyography.
Where Pith is reading between the lines
- The dataset could be used to test whether fatigue detection modules improve robot assistance timing in clinical therapy sessions.
- Researchers might extend the recordings to study how older-adult data affects generalization of exoskeleton controllers trained mainly on young-adult samples.
- Future work could add real-time feedback loops that use the dataset to simulate sensor drift and train corrective models.
Load-bearing premise
The collected multimodal signals stay sufficiently synchronized and representative of real clinical use cases to enable downstream improvements in rehabilitation robot performance.
What would settle it
An experiment in which models trained on K2MUSE fail to show higher accuracy or robustness in predicting intended motion or controlling a lower-limb exoskeleton compared with models trained on existing datasets when tested under fatigue or electrode-shift conditions.
Figures









read the original abstract
The natural interaction and control performance of lower limb rehabilitation robots are closely linked to biomechanical information from various human locomotion activities. Multidimensional human motion data significantly deepen the understanding of the complex mechanisms governing neuromuscular alterations, thereby facilitating the development and application of rehabilitation robots in multifaceted real-world environments. However, existing lower limb datasets are inadequate for supplying the essential multimodal data and large-scale gait samples necessary for the development of effective data-driven approaches, and the significant effects of acquisition interference in real applications are neglected. To fill this gap, we present the K2MUSE dataset, which includes a comprehensive collection of multimodal data, comprising kinematic, kinetic, amplitude mode ultrasound (AUS), and surface electromyography (sEMG) measurements. The proposed dataset includes lower-limb multimodal data collected from two cohorts, including 30 able-bodied young adults and 12 older adults, across different inclines (0$^\circ$, $\pm$5$^\circ$, and $\pm$10$^\circ$), speeds (0.5 m/s, 1.0 m/s, and 1.5 m/s), and representative non-ideal acquisition conditions (muscle fatigue, electrode shifts, and interday differences). The kinematic and ground reaction force data were collected with a Vicon motion capture system and an instrumented treadmill with embedded force plates, whereas the sEMG and AUS data of thirteen muscles on the bilateral lower limbs were synchronously recorded. K2MUSE is released with the corresponding structured documentation, preprocessing pipelines, and example code, thereby providing a comprehensive resource for rehabilitation robot development, biomechanical analysis, and wearable sensing research. The dataset is available at https://k2muse.github.io/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents the K2MUSE dataset, a multimodal lower-limb walking collection comprising kinematic data from a Vicon motion capture system, kinetic data from an instrumented treadmill with embedded force plates, surface electromyography (sEMG), and amplitude-mode ultrasound (AUS) from thirteen bilateral lower-limb muscles. Recordings were obtained from two cohorts (30 able-bodied young adults and 12 older adults) across inclines of 0°, ±5°, and ±10°, speeds of 0.5, 1.0, and 1.5 m/s, and non-ideal acquisition conditions including muscle fatigue, electrode shifts, and interday differences. The dataset is released with structured documentation, preprocessing pipelines, and example code at https://k2muse.github.io/.
Significance. If the multimodal signals prove adequately synchronized and representative, the dataset addresses a documented gap in existing lower-limb resources by supplying both task variability and realistic acquisition interference at scale. Inclusion of older-adult data and AUS alongside sEMG supports development of robust, data-driven controllers for rehabilitation robots that must operate under clinical and real-world conditions.
major comments (1)
- §3 (Data Collection): the abstract states that kinematic, kinetic, sEMG, and AUS signals 'were synchronously recorded,' yet no quantitative validation of temporal alignment (e.g., cross-correlation latency, hardware trigger description, or maximum inter-modality offset) is supplied; this directly affects usability for time-critical robotic control and must be documented with explicit metrics or procedures.
minor comments (2)
- Abstract: the total number of recorded gait cycles or trials per condition is not stated; adding this figure would help readers assess statistical power for downstream machine-learning use cases.
- Dataset release: the accompanying documentation should explicitly list the sampling rates of each modality and any applied filtering or synchronization offsets so that users can reproduce the preprocessing pipeline without ambiguity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript describing the K2MUSE dataset. We address the single major comment below and will incorporate the requested clarifications in the revised version.
read point-by-point responses
-
Referee: [—] §3 (Data Collection): the abstract states that kinematic, kinetic, sEMG, and AUS signals 'were synchronously recorded,' yet no quantitative validation of temporal alignment (e.g., cross-correlation latency, hardware trigger description, or maximum inter-modality offset) is supplied; this directly affects usability for time-critical robotic control and must be documented with explicit metrics or procedures.
Authors: We agree that quantitative details on temporal alignment are important for users developing time-critical controllers. Section 3 of the manuscript describes the overall data collection protocol and states that signals were synchronously recorded, but does not provide explicit hardware trigger specifications or measured latency metrics. In the revision we will expand Section 3 to include: (1) a description of the hardware synchronization method (shared trigger signal from the Vicon system to the force-plate treadmill, sEMG amplifier, and AUS acquisition unit), (2) the nominal sampling rates and any known clock offsets, and (3) any post-hoc validation we performed (e.g., cross-correlation of simultaneously recorded events or maximum observed inter-modality offset on representative trials). If additional quantitative measurements can be extracted from the raw acquisition logs, they will be reported; otherwise we will clearly state the synchronization procedure and its known limitations. revision: yes
Circularity Check
No significant circularity: dataset release without derivations or predictions
full rationale
The paper is a dataset release describing collection of multimodal lower-limb data (kinematics via Vicon, kinetics via instrumented treadmill, sEMG, and AUS) from able-bodied and older adults under varied inclines, speeds, and non-ideal conditions. No equations, models, predictions, or derivation chains are claimed or present in the abstract or described contribution. The central value rests on public data availability and external downstream use rather than any internal fitting, self-definition, or self-citation that reduces to inputs by construction. This is a standard honest non-finding for data papers.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Vicon motion capture and instrumented treadmill provide accurate kinematic and kinetic ground truth under the tested conditions.
- domain assumption Synchronous recording of sEMG and AUS from thirteen bilateral lower-limb muscles is feasible and useful for downstream robot development.
Reference graph
Works this paper leans on
-
[1]
Bovi G, Rabuffetti M, Mazzoleni P and Ferrarin M (2011) A multiple-task gait analysis approach: kinematic, kinetic and emg reference data for healthy young and adult subjects. Gait & posture 33(1): 6–13. Brantley JA, Luu TP , Nakagome S, Zhu F and Contreras-Vidal JL (2018) Full body mobile brain-body imaging data during unconstrained locomotion on stairs,...
work page 2011
-
[2]
Science robotics 3(15): eaar5438
Ding Y , Kim M, Kuindersma S and Walsh CJ (2018) Human-in-the- loop optimization of hip assistance with a soft exosuit duri ng walking. Science robotics 3(15): eaar5438. Divekar NV , Thomas GC, Yerva AR, Frame HB and Gregg RD (2024) A versatile knee exoskeleton mitigates quadricep s fatigue in lifting, lowering, and carrying tasks. Science Robotics 9(94):...
work page 2018
-
[3]
IEEE Transactions on Robotics 38(2): 1230–1249
Huo W, Moon H, Alouane MA, Bonnet V , Huang J, Amirat Y , V aidyanathan R and Mohammed S (2021) Impedance modulation control of a lower-limb exoskeleton to assist si t- to-stand movements. IEEE Transactions on Robotics 38(2): 1230–1249. Jin Y , Alvarez JT, Suitor EL, Swaminathan K, Chin A, Civici US, Nuckols RW, Howe RD and Walsh CJ (2024) Estimation of j...
work page 2021
-
[4]
Kainz H, Graham D, Edwards J, Walsh HP , Maine S, Boyd RN, Lloyd DG, Modenese L and Carty CP (2017) Reliability of four models for clinical gait analysis. Gait & posture 54: 325–331. Kang I, Hsu H and Y oung A (2019) The effect of hip assistance levels on human energetic cost using robotic hip exoskeleto ns. IEEE Robotics and Automation Letters 4(2): 430–...
work page 2017
-
[5]
IEEE Transactions on Neural Systems and Rehabilitation Engineering
Li J, Zhang B, Chen W, Bu C, Zhao Y and Zhao X (2024) Improving hand gesture recognition robustness to dynamic posture variations by multimodal deep feature fusi on. IEEE Transactions on Neural Systems and Rehabilitation Engineering . Liu Z, Han J, Han J and Zhang J (2024) Design and evaluation of a lightweight, ligaments-inspired knee exoskeleton for wa ...
work page 2024
-
[6]
Science Robotics 9(88): eadi8852
Molinaro DD, Kang I and Y oung AJ (2024a) Estimating human joint moments unifies exoskeleton control, reducing user effort. Science Robotics 9(88): eadi8852. Molinaro DD, Scherpereel KL, Schonhaut EB, Evangelopoulos G, Shepherd MK and Y oung AJ (2024b) Task-agnostic exoskeleton control via biological joint moment estimatio n. Nature 635(8038): 337–344. Mor...
work page 2021
-
[7]
Novacheck TF (1998) The biomechanics of running. Gait & posture 7(1): 77–95. Nuckols RW, Lee S, Swaminathan K, Orzel D, Howe RD and Walsh CJ (2021) Individualization of exosuit assistance based on measured muscle dynamics during versatile walking. Science robotics 6(60): eabj1362. Ortiz M, de la Ossa L, Juan J, I´ a˜ nez E, Torricelli D, Tornero J and Azo...
work page 1998
-
[8]
Perera CK, Hussain Z, Khant M, Gopalai AA, Gouwanda D and Ahmad SA (2024) A motion capture dataset on human sitting to walking transitions. Scientific Data 11(1):
work page 2024
-
[9]
IEEE Transactions on Robotics 34(3): 686–701
Quintero D, Villarreal DJ, Lambert DJ, Kapp S and Gregg RD (2018) Continuous-phase control of a powered knee–ankle prosthesis: Amputee experiments across speeds and incline s. IEEE Transactions on Robotics 34(3): 686–701. Rabuffetti M, Marzegan A, Crippa A, Carpinella I, Lencioni T , Castagna A and Ferrarin M (2019) The lamb gait analysis protocol: Definit...
work page 2018
-
[10]
Riener R, Rabuffetti M and Frigo C (2002) Stair ascent and des cent at different inclinations. Gait & posture 15(1): 32–44. Scherpereel K, Molinaro D, Inan O, Shepherd M and Y oung A (2023) A human lower-limb biomechanics and wearable sensors dataset during cyclic and non-cyclic activities. Scientific Data 10(1):
work page 2002
-
[11]
Schulte RV , Prinsen EC, Schaake L, Paassen RP , Zondag M, van Staveren ES, Poel M and Buurke JH (2023) Database of lower limb kinematics and electromyography during gait- related activities in able-bodied subjects. Scientific Data 10(1):
work page 2023
-
[12]
Journal of biomechanics 41(8): 1639–1650
Schwartz MH, Rozumalski A and Trost JP (2008) The effect of walking speed on the gait of typically developing children. Journal of biomechanics 41(8): 1639–1650. Sharma A, Rai V , Calvert M, Dai Z, Guo Z, Boe D and Rombokas E (2023) A non-laboratory gait dataset of full body kinemati cs and egocentric vision. Scientific Data 10(1):
work page 2008
-
[13]
Simonlehner M, Dumphart B and Horsak B (2024) Gaitrec-vr: 3d gait analysis for walking overground with and without a head - mounted-display in virtual reality. Scientific Data 11(1):
work page 2024
-
[14]
Slade P , Kochenderfer MJ, Delp SL and Collins SH (2022) Personalizing exoskeleton assistance while walking in the real world. Nature 610(7931): 277–282. Tan X, Zhang B, Liu G, Zhao X and Zhao Y (2022) A time- independent control system for natural human gait assistan ce with a soft exoskeleton. IEEE Transactions on Robotics 39(2): 1653–1667. CMU Motion C...
work page 2022
-
[15]
Wang C, Chen X, Wang L, Makihata M, Liu HC, Zhou T and Zhao X (2022) Bioadhesive ultrasound for long-term continuous imaging of diverse organs. Science 377(6605): 517–523. Wang G, Jin L, Zhang J, Duan X, Yi J, Zhang M and Sun Z (2024) Recurrent neural network enabled continuous motion estimation of lower limb joints from incomplete semg signal s. IEEE Tra...
work page 2022
-
[16]
Neural networks 11(7-8): 1317–1329
Wolpert DM and Kawato M (1998) Multiple paired forward and inverse models for motor control. Neural networks 11(7-8): 1317–1329. Wu Q, Xi C, Ding L, Wei C, Ren H, Law R, Dong H and Li XL (2016) Classification of emg signals by bfa-optimized gsvcm for diagnosis of fatigue status. IEEE Transactions on Automation Science and Engineering 14(2): 915–930. Yang X...
work page 1998
-
[17]
IEEE Journal of Biomedical and Health Informatics 26(4): 1718–1725
Zeng J, Zhou Y , Yang Y , Yan J and Liu H (2021) Fatigue- sensitivity comparison of semg and a-mode ultrasound based hand gesture recognition. IEEE Journal of Biomedical and Health Informatics 26(4): 1718–1725. Zhang J, Fiers P , Witte KA, Jackson RW, Poggensee KL, Atkeson CG and Collins SH (2017) Human-in-the-loop optimization of exoskeleton assistance d...
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.