Multi-Scale Tensorial Summation and Dimensional Reduction Guided Neural Network for Edge Detection
Pith reviewed 2026-05-22 18:21 UTC · model grok-4.3
The pith
A neural network for edge detection applies multi-scale tensorial summation followed by dimensional reduction blocks to discard redundant subspaces early and focus on essential edge features.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that MTS layers combined with MTS-DR blocks form an effective backbone that removes redundant information at the outset, enabling the network to concentrate specifically on necessary subspaces for edge detection rather than processing all information uniformly.
What carries the argument
MTS Dimensional Reduction (MTS-DR) blocks, which apply the multi-scale tensorial summation factorization operator and then reduce dimensions to prune redundant subspaces while keeping edge-relevant information.
If this is right
- Large receptive fields become available in early layers without adding many consecutive convolutions.
- The network can prioritize subspaces that carry edge information instead of processing full feature volumes.
- A refinement stage after the MTS-DR blocks can produce cleaner edge maps on benchmark datasets.
- The overall structure offers an alternative to deep networks for tasks that need wide context from the start.
Where Pith is reading between the lines
- The same early pruning approach could be tested on related pixel-wise tasks such as semantic segmentation or depth estimation to see if redundant subspace removal transfers.
- Real-time applications on resource-limited devices might benefit from measuring whether the reduced feature volumes lower memory use while holding detection quality steady.
- Future versions could make the reduction strength depend on local image content rather than fixed blocks.
Load-bearing premise
That the MTS factorization operator together with the dimensional reduction blocks will keep all necessary edge information and discard only redundant subspaces without creating artifacts that hurt detection on real images.
What would settle it
If MTS-DR-Net produces lower edge detection scores than standard convolutional networks on noisy or finely detailed real-world images, that would indicate loss of critical information during the reduction step.
Figures







read the original abstract
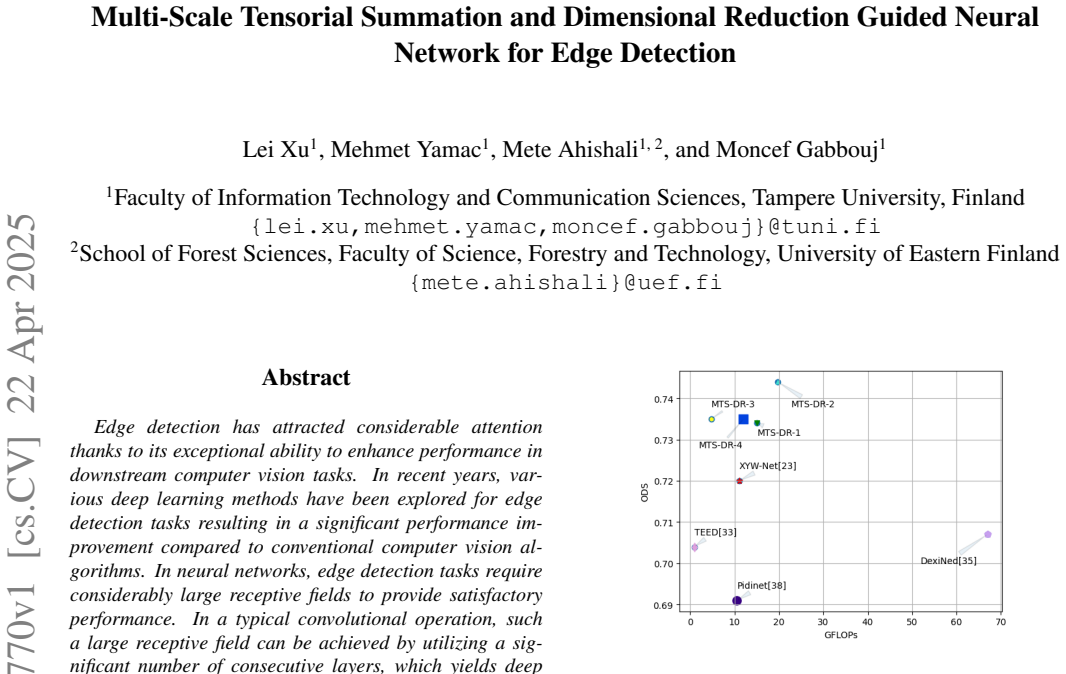
Edge detection has attracted considerable attention thanks to its exceptional ability to enhance performance in downstream computer vision tasks. In recent years, various deep learning methods have been explored for edge detection tasks resulting in a significant performance improvement compared to conventional computer vision algorithms. In neural networks, edge detection tasks require considerably large receptive fields to provide satisfactory performance. In a typical convolutional operation, such a large receptive field can be achieved by utilizing a significant number of consecutive layers, which yields deep network structures. Recently, a Multi-scale Tensorial Summation (MTS) factorization operator was presented, which can achieve very large receptive fields even from the initial layers. In this paper, we propose a novel MTS Dimensional Reduction (MTS-DR) module guided neural network, MTS-DR-Net, for the edge detection task. The MTS-DR-Net uses MTS layers, and corresponding MTS-DR blocks as a new backbone to remove redundant information initially. Such a dimensional reduction module enables the neural network to focus specifically on relevant information (i.e., necessary subspaces). Finally, a weight U-shaped refinement module follows MTS-DR blocks in the MTS-DR-Net. We conducted extensive experiments on two benchmark edge detection datasets: BSDS500 and BIPEDv2 to verify the effectiveness of our model. The implementation of the proposed MTS-DR-Net can be found at https://github.com/LeiXuAI/MTS-DR-Net.git.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces MTS-DR-Net, a neural network for edge detection that uses Multi-Scale Tensorial Summation (MTS) layers combined with novel MTS Dimensional Reduction (MTS-DR) blocks as a backbone. These blocks are intended to remove redundant information early, enabling the network to focus on necessary subspaces for edges, followed by a weighted U-shaped refinement module. Experiments are reported on the BSDS500 and BIPEDv2 benchmarks to demonstrate effectiveness.
Significance. If the central performance claims hold with proper validation, the approach could provide a useful alternative backbone for edge detection by achieving large receptive fields without deep layer stacking and by explicitly incorporating dimensional reduction to prune subspaces. The reproducibility via the provided GitHub link is a positive factor.
major comments (2)
- [§3 (MTS-DR blocks description)] The core claim that MTS-DR blocks remove only redundant subspaces while fully preserving necessary edge information (abstract and §3) is load-bearing but unsupported. The MTS operator performs linear summation over scales, and the subsequent DR projects to lower dimensions; no subspace preservation analysis, reconstruction metrics on edge features, or ablation isolating DR's effect on fine textures/low-contrast boundaries is presented to rule out irreversible loss of edge cues.
- [Experiments section / Table 1] Table 1 or equivalent results section: without reported quantitative metrics (ODS, OIS, AP), ablation studies on the DR component, or error analysis comparing MTS-DR-Net against MTS-only variants on BSDS500 and BIPEDv2, the effectiveness claim cannot be assessed and the experiments do not yet substantiate the architectural novelty.
minor comments (2)
- [Abstract] The abstract mentions 'extensive experiments' but omits all numerical results; including key metrics would strengthen the summary.
- [§3] Notation for the MTS factorization and the exact form of the dimensional reduction operator should be defined with equations in §3 to improve clarity and allow readers to verify the projection properties.
Simulated Author's Rebuttal
We thank the referee for the thorough review and constructive suggestions. We address the major comments below and outline the revisions planned for the manuscript.
read point-by-point responses
-
Referee: [§3 (MTS-DR blocks description)] The core claim that MTS-DR blocks remove only redundant subspaces while fully preserving necessary edge information (abstract and §3) is load-bearing but unsupported. The MTS operator performs linear summation over scales, and the subsequent DR projects to lower dimensions; no subspace preservation analysis, reconstruction metrics on edge features, or ablation isolating DR's effect on fine textures/low-contrast boundaries is presented to rule out irreversible loss of edge cues.
Authors: We agree that additional supporting analysis would strengthen the manuscript. The MTS-DR block is designed to perform dimensional reduction after multi-scale tensorial summation to focus on relevant subspaces for edge detection. To address this, we will add a new subsection in the revised paper with subspace preservation analysis, including reconstruction error metrics on edge-related features and an ablation study isolating the effect of the DR component on fine textures and low-contrast boundaries. revision: yes
-
Referee: [Experiments section / Table 1] Table 1 or equivalent results section: without reported quantitative metrics (ODS, OIS, AP), ablation studies on the DR component, or error analysis comparing MTS-DR-Net against MTS-only variants on BSDS500 and BIPEDv2, the effectiveness claim cannot be assessed and the experiments do not yet substantiate the architectural novelty.
Authors: We acknowledge that the current experimental section would benefit from more detailed quantitative reporting and ablations. While our experiments demonstrate effectiveness on the mentioned datasets, we will revise the results section to include standard metrics such as ODS, OIS, and AP in Table 1, add ablation studies specifically on the DR component, and include error analysis or comparative visualizations against MTS-only variants to better highlight the contribution of the dimensional reduction. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper cites a recently presented MTS factorization operator to motivate large receptive fields from initial layers and then introduces MTS-DR blocks as a novel dimensional reduction module for edge detection. This is framed as an empirical engineering decision, with effectiveness verified through standard benchmark experiments on BSDS500 and BIPEDv2. No equations, predictions, or central claims reduce by construction to fitted parameters, self-definitions, or unverified self-citation chains; the derivation remains self-contained with independent content from the new DR module and external validation.
Axiom & Free-Parameter Ledger
free parameters (1)
- Network hyperparameters and layer dimensions
axioms (2)
- domain assumption MTS factorization operator achieves very large receptive fields from initial layers
- ad hoc to paper Dimensional reduction removes only redundant information while retaining necessary subspaces for edges
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/DimensionForcing.leanD3_admits_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
window scales WS = [8,16,32,64] chosen for multi-scale receptive fields
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
P. Arbel ´aes, M. Maire, C. Fowlkes, and J. Malik. Contour Detection and Hierarchical Image Segmentaion.IEEE Trans. Pattern Anal. Mach. Intell., 33(5):898–916, 2011
work page 2011
-
[2]
G. Bertasius, J. Shi, and L. Torresani. Deepedge: A multi- scale bifurcated deep network for top-down contour detec- tion. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages 4380–4389, 2015
work page 2015
-
[3]
J. Canny. A Computational Approach to Edge Detection. IEEE Transactions on Pattern Analysis and Machine Intelli- gence, PAMI-8(6):679–698, 1986
work page 1986
-
[4]
B. Cetinkaya, S. Kalkan, and E. Akbas. Ranked: Addressing imbalance and uncertainty in edge detection using ranking- based losses. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages 3239– 3249, 2024
work page 2024
-
[5]
L. Chen, X. Chu, X. Zhang, and J. Sun. Simple baselines for image restoration. In European conference on computer vision, pages 17–33. Springer, 2022
work page 2022
-
[6]
X. Chen, X. Wang, Y . Lu, W. Li, Z. Wang, and Z. Huang. RBPNET: An asymptotic Residual Back-Projection Network for super-resolution of very low-resolution face image. Neu- rocomputing, 376:119–127, 2020
work page 2020
-
[7]
Y . N. Dauphin, A. Fan, M. Auli, and D. Grangier. Language modeling with gated convolutional networks. In D. Precup and Y . W. Teh, editors,Proceedings of the 34th International Conference on Machine Learning, volume 70 ofProceedings of Machine Learning Research, pages 933–941. PMLR, 06– 11 Aug 2017
work page 2017
-
[8]
N. Du, Y . Huang, A. M. Dai, S. Tong, D. Lepikhin, Y . Xu, M. Krikun, Y . Zhou, A. W. Yu, O. Firat, et al. Glam: Effi- cient scaling of language models with mixture-of-experts. In International conference on machine learning, pages 5547–
-
[9]
W. Gao, L. Yang, X. Zhang, and H. Liu. An improved Sobel edge detection. Proceedings - 2010 3rd IEEE International Conference on Computer Science and Information Technol- ogy, ICCSIT 2010, 5:67–71, 2010
work page 2010
-
[10]
K. Han, Y . Wang, Q. Tian, J. Guo, C. Xu, and C. Xu. Ghost- net: More features from cheap operations. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 1577–1586, 2019
work page 2020
-
[11]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learn- ing for image recognition. In Proceedings of the IEEE con- ference on computer vision and pattern recognition , pages 770–778, 2016
work page 2016
-
[12]
Gaussian Error Linear Units (GELUs)
D. Hendrycks and K. Gimpel. Gaussian error linear units (gelus). arXiv preprint arXiv:1606.08415, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[13]
R. A. Jacobs, M. I. Jordan, S. J. Nowlan, and G. E. Hin- ton. Adaptive mixtures of local experts. Neural Computa- tion, 3:79–87, 1991
work page 1991
-
[14]
A. Kalra and R. L. Chhokar. A hybrid approach using so- bel and canny operator for digital image edge detection. Proceedings - 2016 International Conference on Micro- Electronics and Telecommunication Engineering, ICMETE 2016, pages 305–310, 2016
work page 2016
-
[15]
D. P. Kingma and J. Ba. Adam: A method for stochastic op- timization. In Y . Bengio and Y . LeCun, editors,3rd Interna- tional Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, May 7-9, 2015, Conference Track Pro- ceedings, 2015
work page 2015
-
[16]
Y . Liu, M. M. Cheng, X. Hu, J. W. Bian, L. Zhang, X. Bai, and J. Tang. Richer Convolutional Features for Edge Detec- tion. IEEE Transactions on Pattern Analysis and Machine Intelligence, 41(8):1939–1946, 2019
work page 1939
-
[17]
D. R. Martin, C. C. Fowlkes, and J. Malik. Learning to de- tect natural image boundaries using local brightness, color, and texture cues. IEEE Trans. Pattern Anal. Mach. Intell. , 26(5):530–549, May 2004
work page 2004
-
[18]
D. A. M ´ely, J. Kim, M. McGill, Y . Guo, and T. Serre. A sys- tematic comparison between visual cues for boundary detec- tion. Vision research, 120:93–107, 2016
work page 2016
-
[19]
V . Nair and G. E. Hinton. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th international conference on machine learning (ICML-10) , pages 807–814, 2010
work page 2010
-
[20]
A. Novikov, D. Podoprikhin, A. Osokin, and D. P. Vetrov. Tensorizing neural networks. Advances in neural informa- tion processing systems, 28, 2015
work page 2015
-
[21]
S. Oh, N. Park, J.-G. Jang, L. Sael, and U. Kang. High- performance tucker factorization on heterogeneous plat- forms. IEEE Transactions on Parallel and Distributed Sys- tems, 30(10):2237–2248, 2019
work page 2019
-
[22]
I. V . Oseledets. Tensor-train decomposition. SIAM Journal on Scientific Computing, 33(5):2295–2317, Jan. 2011
work page 2011
-
[23]
Y . Panagakis, J. Kossaifi, G. G. Chrysos, J. Oldfield, M. A. Nicolaou, A. Anandkumar, and S. Zafeiriou. Tensor methods in computer vision and deep learning. Proceedings of the IEEE, 109(5):863–890, 2021
work page 2021
-
[24]
X. Pang, C. Lin, F. Li, and Y . Pan. Bio-inspired xyw par- allel pathway edge detection network. Expert Systems with Applications, 237:121649, 2024
work page 2024
-
[25]
A.-H. Phan, K. Sobolev, K. Sozykin, D. Ermilov, J. Gusak, P. Tichavsk`y, V . Glukhov, I. Oseledets, and A. Cichocki. Sta- ble low-rank tensor decomposition for compression of con- volutional neural network. In Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part XXIX 16, pages 522–539. Springer, 2020
work page 2020
-
[26]
M. Pu, Y . Huang, Q. Guan, and H. Ling. RINDNet: Edge De- tection for Discontinuity in Reflectance, Illumination, Nor- mal and Depth. Proceedings of the IEEE International Con- ference on Computer Vision, pages 6859–6868, 2021
work page 2021
-
[27]
M. Pu, Y . Huang, Y . Liu, Q. Guan, and H. Ling. Edter: Edge detection with transformer. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages 1402–1412, 2022
work page 2022
-
[28]
X. Ren, C. C. Fowlkes, and J. Malik. Scale-invariant contour completion using conditional random fields. In Tenth IEEE International Conference on Computer Vision (ICCV’05) Volume 1, volume 2, pages 1214–1221. IEEE, 2005
work page 2005
-
[29]
N. S. Sanjay and A. Ahmadinia. Mobilenet-tiny: A deep neural network-based real-time object detection for rasberry 4329 pi. 2019 18th IEEE International Conference On Machine Learning And Applications (ICMLA), pages 647–652, 2019
work page 2019
-
[30]
L. SIfre and S. Mallat. Rigid-motion scattering for texture classiflcation. International Journal of Computer Vision , 2014
work page 2014
-
[31]
S. Singh and R. Singh. Comparison of various edge detec- tion techniques. 2015 International Conference on Comput- ing for Sustainable Global Development, INDIACom 2015 , 9(2):393–396, 2015
work page 2015
- [32]
- [33]
- [34]
-
[35]
Z. Su, L. Fang, W. Kang, D. Hu, M. Pietik ¨ainen, and L. Liu. Dynamic group convolution for accelerating convolutional neural networks. In Computer Vision–ECCV 2020: 16th Eu- ropean Conference, Glasgow, UK, August 23–28, 2020, Pro- ceedings, Part VI 16, pages 138–155. Springer, 2020
work page 2020
-
[36]
Z. Sun, W. Liu, Z. Yu, D. Hu, Q. Liao, Q. Tian, M. Pietik ¨ainen, and L. Liu. Pixel Difference Networks for Efficient Edge Detection. Proceedings of the IEEE Inter- national Conference on Computer Vision, pages 5097–5107, 2021
work page 2021
-
[37]
L. R. Tucker. Some mathematical notes on three-mode factor analysis. Psychometrika, 31:279–311, 1966
work page 1966
-
[38]
Y . Wang, X. Zhao, Y . Li, and K. Huang. Deep crisp bound- aries: From boundaries to higher-level tasks. IEEE Transac- tions on Image Processing, 28(3):1285–1298, 2019
work page 2019
- [39]
-
[40]
D. Xu, W. Ouyang, X. Alameda-Pineda, E. Ricci, X. Wang, and N. Sebe. Learning deep structured multi-scale features using attention-gated crfs for contour prediction. Advances in neural information processing systems, 30, 2017
work page 2017
- [41]
-
[42]
W. Xuan, S. Zhao, Y . Yao, J. Liu, T. Liu, Y . Chen, B. Du, and D. Tao. Pnt-edge: Towards robust edge detection with noisy labels by learning pixel-level noise transitions. In Proceed- ings of the 31st ACM International Conference on Multime- dia, pages 1924–1932, 2023
work page 1924
- [43]
-
[44]
M. Yamac ¸, M. N. Yousaf, S. Kiranyaz, and M. Gabbouj. Multiscale tensor summation factorization as a new neural network layer (mts layer) for multidimensional data process- ing. In arXiv: 2504.13975, 2025
-
[45]
B. Yang, G. Bender, Q. V . Le, and J. Ngiam. Condconv: Conditionally parameterized convolutions for efficient infer- ence. Advances in neural information processing systems , 32, 2019
work page 2019
-
[46]
F. Yang, L. Zhang, S. Yu, D. Prokhorov, X. Mei, and H. Ling. Feature Pyramid and Hierarchical Boosting Network for Pavement Crack Detection.IEEE Transactions on Intelligent Transportation Systems, pages 1–11, 2019
work page 2019
-
[47]
Y . Ye, K. Xu, Y . Huang, R. Yi, and Z. Cai. Diffusionedge: Diffusion probabilistic model for crisp edge detection. In Proceedings of the AAAI conference on artificial intelli- gence, volume 38, pages 6675–6683, 2024
work page 2024
-
[48]
Y . Ye, R. Yi, Z. Gao, Z. Cai, and K. Xu. Delving into crisp- ness: Guided label refinement for crisp edge detection.IEEE Transactions on Image Processing, 32:4199–4211, 2023
work page 2023
-
[49]
M. Yin, Y . Sui, S. Liao, and B. Yuan. Towards efficient ten- sor decomposition-based dnn model compression with opti- mization framework. In Proceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, pages 10674–10683, 2021
work page 2021
-
[50]
C. You, L. Jiao, X. Liu, L. Li, F. Liu, W. Ma, and S. Yang. Boundary-Aware Multiscale Learning Perception for Re- mote Sensing Image Segmentation. IEEE Transactions on Geoscience and Remote Sensing, 61:1–15, 2023
work page 2023
- [51]
-
[52]
C. Zhou, Y . Huang, M. Pu, Q. Guan, R. Deng, and H. Ling. Muge: Multiple granularity edge detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pat- tern Recognition, pages 25952–25962, 2024
work page 2024
- [53]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.