Approximating Global Contact-Implicit MPC via Sampling and Local Complementarity
Pith reviewed 2026-05-22 14:01 UTC · model grok-4.3
The pith
Sampling end-effector locations before local contact-rich MPC approximates global optimization for real-time dexterous manipulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that considering a contact-free stage that samples end-effector locations, then evaluating the cost predicted by contact-rich MPC local to each sampled location, produces a globally-informed contact-implicit controller that remains capable of real-time dexterous manipulation.
What carries the argument
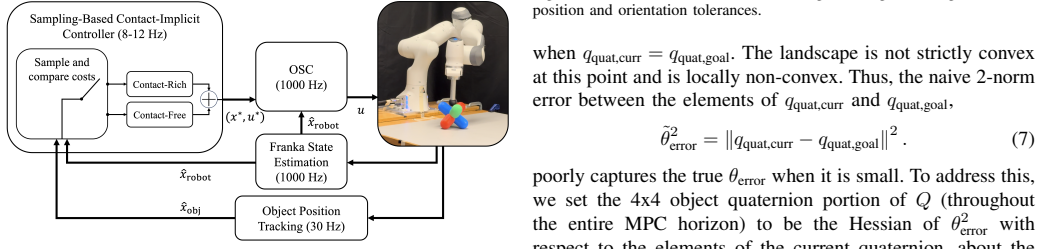
Parallel low-dimensional sampling of end-effector locations in a contact-free stage, followed by local complementarity-constrained MPC cost evaluation for each sample.
If this is right
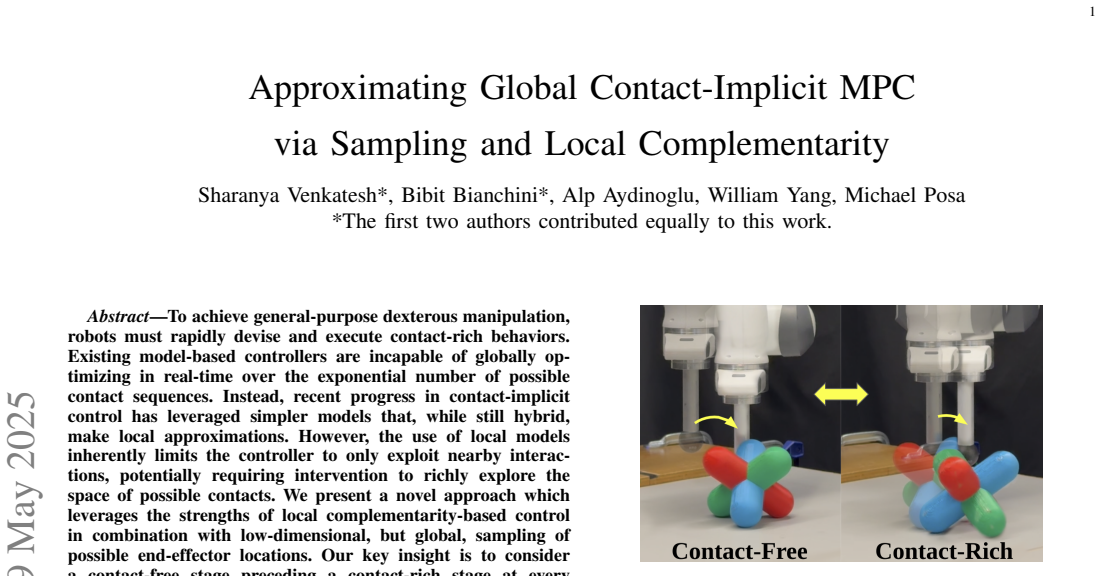
- The controller achieves real-time execution of precise non-prehensile manipulation on hardware such as the Franka Panda arm.
- It enables handling of non-convex objects by exploring a range of contact possibilities without exponential enumeration of sequences.
- The method reduces reliance on external intervention to explore the space of possible contacts during execution.
Where Pith is reading between the lines
- The sampling-plus-local-MPC pattern could be applied to other hybrid control domains such as legged locomotion where discrete contact modes must be chosen quickly.
- Adaptive sampling distributions drawn from task priors might further reduce the number of samples needed while preserving performance gains.
- Direct comparison of final costs between the full method and local-only MPC on the same hardware tasks would quantify how much global information the sampling stage actually supplies.
Load-bearing premise
A low-dimensional sampling of end-effector locations is sufficient to reach contact sequences that are globally better than those found by a purely local controller.
What would settle it
On a manipulation task with many distinct contact modes, the sampled controller would show no consistent improvement in success rate or cost over a purely local baseline even as the number of samples is increased.
Figures






read the original abstract
To achieve general-purpose dexterous manipulation, robots must rapidly devise and execute contact-rich behaviors. Existing model-based controllers are incapable of globally optimizing in real-time over the exponential number of possible contact sequences. Instead, recent progress in contact-implicit control has leveraged simpler models that, while still hybrid, make local approximations. However, the use of local models inherently limits the controller to only exploit nearby interactions, potentially requiring intervention to richly explore the space of possible contacts. We present a novel approach which leverages the strengths of local complementarity-based control in combination with low-dimensional, but global, sampling of possible end-effector locations. Our key insight is to consider a contact-free stage preceding a contact-rich stage at every control loop. Our algorithm, in parallel, samples end effector locations to which the contact-free stage can move the robot, then considers the cost predicted by contact-rich MPC local to each sampled location. The result is a globally-informed, contact-implicit controller capable of real-time dexterous manipulation. We demonstrate our controller on precise, non-prehensile manipulation of non-convex objects using a Franka Panda arm. Project page: https://approximating-global-ci-mpc.github.io
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an algorithm for approximating global contact-implicit MPC by running a contact-free stage that samples end-effector target locations in parallel, then evaluating the predicted cost of a local complementarity-based contact-rich MPC for each sample. The resulting controller is claimed to be globally informed while remaining real-time capable, and is demonstrated on precise non-prehensile manipulation of non-convex objects with a Franka Panda arm.
Significance. If the sampling stage reliably identifies contact sequences with lower cost than a purely local optimizer, the method offers a practical compromise between the combinatorial difficulty of true global contact optimization and the myopic behavior of local complementarity MPC. The real-robot experiments on a standard platform provide concrete evidence of feasibility for dexterous tasks.
major comments (2)
- [§3] §3 (Method): The central claim that parallel low-dimensional sampling of end-effector locations yields contact sequences whose predicted cost is meaningfully lower than a single local MPC rests on the unverified premise that the chosen samples intersect superior contact-mode basins. No analysis or bound is given showing that Cartesian sampling with modest cardinality covers the relevant modes for non-convex geometries, where infinitesimal target shifts can produce combinatorially different sequences.
- [§4] §4 (Experiments): Direct quantitative comparisons to a baseline single local complementarity MPC are not reported for the same tasks; the manuscript only shows successful execution of the proposed controller. Without cost or success-rate deltas demonstrating improvement attributable to the sampling stage, the approximation-to-global claim remains unsupported.
minor comments (2)
- [§3.2] Clarify the exact sampling distribution, number of parallel samples, and termination criteria for the contact-free stage in the implementation details.
- [§4] Add a table or plot comparing predicted costs and realized task performance between the proposed method and a pure local MPC baseline on the same object geometries.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback, which helps clarify the strengths and limitations of our approach. We address each major comment below and have updated the manuscript accordingly.
read point-by-point responses
-
Referee: [§3] §3 (Method): The central claim that parallel low-dimensional sampling of end-effector locations yields contact sequences whose predicted cost is meaningfully lower than a single local MPC rests on the unverified premise that the chosen samples intersect superior contact-mode basins. No analysis or bound is given showing that Cartesian sampling with modest cardinality covers the relevant modes for non-convex geometries, where infinitesimal target shifts can produce combinatorially different sequences.
Authors: We acknowledge that the manuscript does not include a formal coverage bound or analysis proving that modest-cardinality Cartesian sampling of end-effector targets necessarily intersects superior contact-mode basins for arbitrary non-convex geometries. The method is instead motivated by the structure of non-prehensile manipulation, where the contact-free stage can reach a discrete set of promising end-effector poses that induce distinct contact sequences when followed by local complementarity MPC. In the revised manuscript we have added a discussion paragraph in §3 that explains the sampling design (uniform grid over a task-relevant Cartesian region) and its relation to the geometry of the objects used in our experiments, together with an empirical illustration of how different samples produce qualitatively different contact sequences. A general theoretical guarantee for all possible non-convex shapes remains beyond the scope of the present work. revision: partial
-
Referee: [§4] §4 (Experiments): Direct quantitative comparisons to a baseline single local complementarity MPC are not reported for the same tasks; the manuscript only shows successful execution of the proposed controller. Without cost or success-rate deltas demonstrating improvement attributable to the sampling stage, the approximation-to-global claim remains unsupported.
Authors: We agree that explicit side-by-side quantitative comparisons are necessary to substantiate the benefit of the sampling stage. The revised experimental section now includes tables reporting predicted cost and success rate for both the full proposed controller and a baseline local complementarity MPC (identical dynamics, horizon, and solver settings) executed on the same set of task instances. These results show consistent cost reduction and higher success rates when the sampling stage is active, directly supporting the claim that the parallel evaluation identifies lower-cost contact sequences. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper describes a heuristic that runs parallel low-dimensional sampling of end-effector targets followed by independent local complementarity MPC solves; this construction is presented as an algorithmic approximation rather than a mathematical derivation that reduces to its own inputs. No equations are shown to be equivalent by construction, no fitted parameter is relabeled as a prediction, and the central claim does not rest on a self-citation chain whose validity is presupposed by the present work. The method builds on standard MPC and complementarity formulations with an explicit sampling stage whose justification is empirical and falsifiable outside any fitted values internal to the paper.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Complementarity constraints can accurately model contact events in the local MPC stage.
- domain assumption A contact-free stage can reliably reach any sampled end-effector location without premature contact.
Reference graph
Works this paper leans on
-
[1]
Diffusion policy: Visuomotor policy learning via ac- tion diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via ac- tion diffusion,” The International Journal of Robotics Research , p. 02783649241273668, 2023
work page 2023
-
[2]
Enhancing dexterity in robotic manipulation via hierarchical contact exploration,
X. Cheng, S. Patil, Z. Temel, O. Kroemer, and M. T. Mason, “Enhancing dexterity in robotic manipulation via hierarchical contact exploration,” arXiv preprint arXiv:2307.00383 , 2023
-
[3]
Global planning for contact-rich manipulation via local smoothing of quasi-dynamic contact models,
T. Pang, H. T. Suh, L. Yang, and R. Tedrake, “Global planning for contact-rich manipulation via local smoothing of quasi-dynamic contact models,” IEEE Transactions on Robotics , 2023
work page 2023
-
[4]
Drop: Dexterous reorientation via online planning,
A. H. Li, P. Culbertson, V . Kurtz, and A. D. Ames, “Drop: Dexterous reorientation via online planning,” arXiv preprint arXiv:2409.14562 , 2024
-
[5]
Predictive sampling: Real-time behaviour synthesis with mujoco,
T. Howell, N. Gileadi, S. Tunyasuvunakool, K. Zakka, T. Erez, and Y . Tassa, “Predictive sampling: Real-time behaviour synthesis with mujoco,” arXiv preprint arXiv:2212.00541 , 2022
-
[6]
Linear complemen- tarity systems,
W. Heemels, J. M. Schumacher, and S. Weiland, “Linear complemen- tarity systems,” SIAM journal on applied mathematics , vol. 60, no. 4, pp. 1234–1269, 2000
work page 2000
-
[7]
Contact-implicit trajectory optimization using orthogonal collocation,
A. Patel, S. L. Shield, S. Kazi, A. M. Johnson, and L. T. Biegler, “Contact-implicit trajectory optimization using orthogonal collocation,” IEEE Robotics and Automation Letters , vol. 4, no. 2, pp. 2242–2249, 2019
work page 2019
-
[8]
A direct method for trajectory optimization of rigid bodies through contact,
M. Posa, C. Cantu, and R. Tedrake, “A direct method for trajectory optimization of rigid bodies through contact,” The International Journal of Robotics Research , vol. 33, no. 1, pp. 69–81, 2014
work page 2014
-
[9]
Bundled gradients through contact via randomized smoothing,
H. J. T. Suh, T. Pang, and R. Tedrake, “Bundled gradients through contact via randomized smoothing,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4000–4007, 2022
work page 2022
-
[10]
Efficient object manipulation planning with monte carlo tree search,
H. Zhu, A. Meduri, and L. Righetti, “Efficient object manipulation planning with monte carlo tree search,” in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE, 2023, pp. 10 628–10 635
work page 2023
-
[11]
Sampling-based contact-rich motion control,
L. Liu, K. Yin, M. Van de Panne, T. Shao, and W. Xu, “Sampling-based contact-rich motion control,” in ACM SIGGRAPH 2010 papers , 2010, pp. 1–10
work page 2010
-
[12]
A hierarchical framework for long horizon planning of object-contact trajectories,
B. Aceituno and A. Rodriguez, “A hierarchical framework for long horizon planning of object-contact trajectories,” in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE, 2022, pp. 189–196
work page 2022
-
[13]
Dynamic on-palm manipulation via controlled sliding,
W. Yang and M. Posa, “Dynamic on-palm manipulation via controlled sliding,” in Robotics: Science and Systems (RSS) , Jul. 2024. [Online]. Available: https://roboticsconference.org/program/papers/12/
work page 2024
-
[14]
Consensus com- plementarity control for multi-contact mpc,
A. Aydinoglu, A. Wei, W.-C. Huang, and M. Posa, “Consensus com- plementarity control for multi-contact mpc,” IEEE Transactions on Robotics, 2024
work page 2024
-
[15]
G. Kim, D. Kang, J.-H. Kim, S. Hong, and H.-W. Park, “Contact-implicit mpc: Controlling diverse quadruped motions without pre-planned con- tact modes or trajectories,” arXiv preprint arXiv:2312.08961 , 2023
-
[16]
Fast contact-implicit model-predictive control,
S. L. Cleac’h, T. Howell, M. Schwager, and Z. Manchester, “Fast contact-implicit model-predictive control,” arXiv preprint arXiv:2107.05616, 2021
-
[17]
Inverse dynamics trajectory optimization for contact-implicit model predictive control,
V . Kurtz, A. Castro, A. ¨O. ¨Onol, and H. Lin, “Inverse dynamics trajectory optimization for contact-implicit model predictive control,” arXiv preprint arXiv:2309.01813 , 2023
-
[18]
Synthesis and stabilization of complex behaviors through online trajectory optimization,
Y . Tassa, T. Erez, and E. Todorov, “Synthesis and stabilization of complex behaviors through online trajectory optimization,” in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems . IEEE, 2012, pp. 4906–4913
work page 2012
-
[19]
Aggressive driving with model predictive path integral control,
G. Williams, P. Drews, B. Goldfain, J. M. Rehg, and E. A. Theodorou, “Aggressive driving with model predictive path integral control,” in2016 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, 2016, pp. 1433–1440
work page 2016
-
[20]
Full-order sampling-based mpc for torque-level locomotion control via diffusion-style annealing,
H. Xue, C. Pan, Z. Yi, G. Qu, and G. Shi, “Full-order sampling-based mpc for torque-level locomotion control via diffusion-style annealing,”
-
[21]
Available: https://arxiv.org/abs/2409.15610
[Online]. Available: https://arxiv.org/abs/2409.15610
-
[22]
D. E. Stewart, Dynamics with Inequalities: impacts and hard constraints. SIAM, 2011
work page 2011
-
[23]
Set-valued rigid-body dynamics for simultane- ous, inelastic, frictional impacts,
M. Halm and M. Posa, “Set-valued rigid-body dynamics for simultane- ous, inelastic, frictional impacts,” The International Journal of Robotics Research, p. 02783649241236860, 2024
work page 2024
-
[24]
A planning framework for non- prehensile manipulation under clutter and uncertainty,
M. R. Dogar and S. S. Srinivasa, “A planning framework for non- prehensile manipulation under clutter and uncertainty,” Autonomous Robots, vol. 33, pp. 217–236, 2012. 9
work page 2012
-
[25]
Stable pushing: Mechanics, control- lability, and planning,
K. M. Lynch and M. T. Mason, “Stable pushing: Mechanics, control- lability, and planning,” The international journal of robotics research , vol. 15, no. 6, pp. 533–556, 1996
work page 1996
-
[26]
M. Anitescu and F. A. Potra, “Formulating dynamic multi-rigid-body contact problems with friction as solvable linear complementarity prob- lems,” Nonlinear Dynamics, vol. 14, no. 3, pp. 231–247, 1997
work page 1997
-
[27]
Drake: Model-based design and verification for robotics,
R. Tedrake et al. , “Drake: Model-based design and verification for robotics,” 2019
work page 2019
-
[28]
Generation of dynamic humanoid behaviors through task-space control with conic optimization,
P. M. Wensing and D. E. Orin, “Generation of dynamic humanoid behaviors through task-space control with conic optimization,” in 2013 IEEE International Conference on Robotics and Automation . IEEE, 2013, pp. 3103–3109
work page 2013
-
[29]
Foundationpose: Unified 6d pose estimation and tracking of novel objects,
B. Wen, W. Yang, J. Kautz, and S. Birchfield, “Foundationpose: Unified 6d pose estimation and tracking of novel objects,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2024, pp. 17 868–17 879
work page 2024
-
[30]
Lcm: Lightweight commu- nications and marshalling,
A. S. Huang, E. Olson, and D. C. Moore, “Lcm: Lightweight commu- nications and marshalling,” in 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems . IEEE, 2010, pp. 4057–4062
work page 2010
-
[31]
Osqp: An operator splitting solver for quadratic programs,
B. Stellato, G. Banjac, P. Goulart, A. Bemporad, and S. Boyd, “Osqp: An operator splitting solver for quadratic programs,” Mathematical Programming Computation, vol. 12, no. 4, pp. 637–672, 2020
work page 2020
-
[32]
Gurobi Optimizer Reference Manual,
Gurobi Optimization, LLC, “Gurobi Optimizer Reference Manual,”
- [33]
-
[34]
Visual dexterity: In-hand reorientation of novel and complex object shapes,
T. Chen, M. Tippur, S. Wu, V . Kumar, E. Adelson, and P. Agrawal, “Visual dexterity: In-hand reorientation of novel and complex object shapes,” Science Robotics, vol. 8, no. 84, p. eadc9244, 2023
work page 2023
-
[35]
Global contact-rich planning with sparsity-rich semidefi- nite relaxations
S. Kang, G. Liu, and H. Yang, “Global contact-rich planning with sparsity-rich semidefinite relaxations,”arXiv preprint arXiv:2502.02829, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.