Multi-needle Localization for Pelvic Seed Implant Brachytherapy based on Tip-handle Detection and Matching
Pith reviewed 2026-05-21 21:15 UTC · model grok-4.3
The pith
Detecting needle tips and handles then matching them with a greedy algorithm localizes multiple needles more accurately than segmentation in brachytherapy CT scans.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By treating each needle as a pair of detectable tip and handle features rather than a continuous segmentation mask, an HRNet-based detector combined with greedy matching and merging reconstructs complete needle paths and yields higher precision and F1 scores than nnUNet-based segmentation on 100 clinical cases.
What carries the argument
The greedy matching and merging (GMM) procedure that solves the unbalanced assignment problem with constraints (UAP-C) to iteratively pair detected tips with handles and reconstruct 3D needle paths.
If this is right
- Needle paths can be recovered even when needles adhere or image contrast is low.
- The same tip-handle representation may reduce reliance on dense pixel-wise labels for similar thin-structure localization tasks.
- Improved localization accuracy supports more confident seed placement planning in brachytherapy workflows.
- The decoupled orientation prediction allows the detector to output both position and direction without post-processing refinement.
Where Pith is reading between the lines
- The detection-plus-matching pattern could transfer to other medical imaging problems that involve counting and tracing many thin linear objects such as vessels or catheters.
- If the matcher remains stable under realistic false-positive rates, the approach may lower the annotation burden compared with full segmentation masks.
- Extending the greedy merger with learned costs instead of fixed distance metrics might further improve robustness on unseen scanner protocols.
Load-bearing premise
Detected tips and handles can still be correctly paired into complete individual needles by the greedy matcher even when false positives appear or needles touch in low-contrast images.
What would settle it
Running the method and the nnUNet baseline on the same 100-patient test set and finding that precision or F1 score does not exceed the segmentation baseline would falsify the performance claim.
Figures




read the original abstract
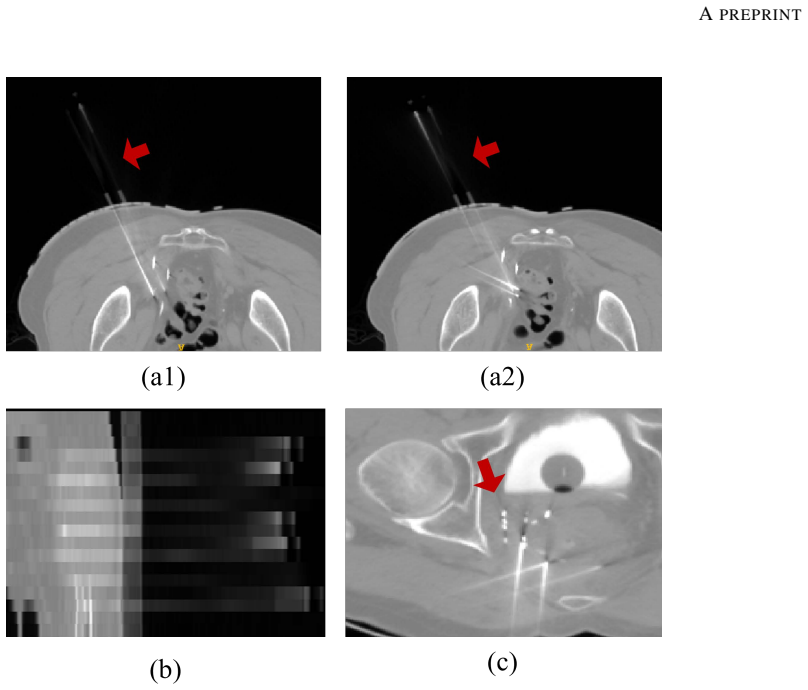
Accurate multi-needle localization in intraoperative CT images is crucial for optimizing seed placement in pelvic seed implant brachytherapy. However, this task is challenging due to poor image contrast and needle adhesion. This paper presents a novel approach that reframes needle localization as a tip-handle detection and matching problem to overcome these difficulties. An anchor-free network, based on HRNet, is proposed to extract multi-scale features and accurately detect needle tips and handles by predicting their centers and orientations using decoupled branches for heatmap regression and polar angle prediction. To associate detected tips and handles into individual needles, a greedy matching and merging (GMM) method designed to solve the unbalanced assignment problem with constraints (UAP-C) is presented. The GMM method iteratively selects the most probable tip-handle pairs and merges them based on a distance metric to reconstruct 3D needle paths. Evaluated on a dataset of 100 patients, the proposed method demonstrates superior performance, achieving higher precision and F1 score compared to a segmentation-based method utilizing the nnUNet model,thereby offering a more robust and accurate solution for needle localization in complex clinical scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
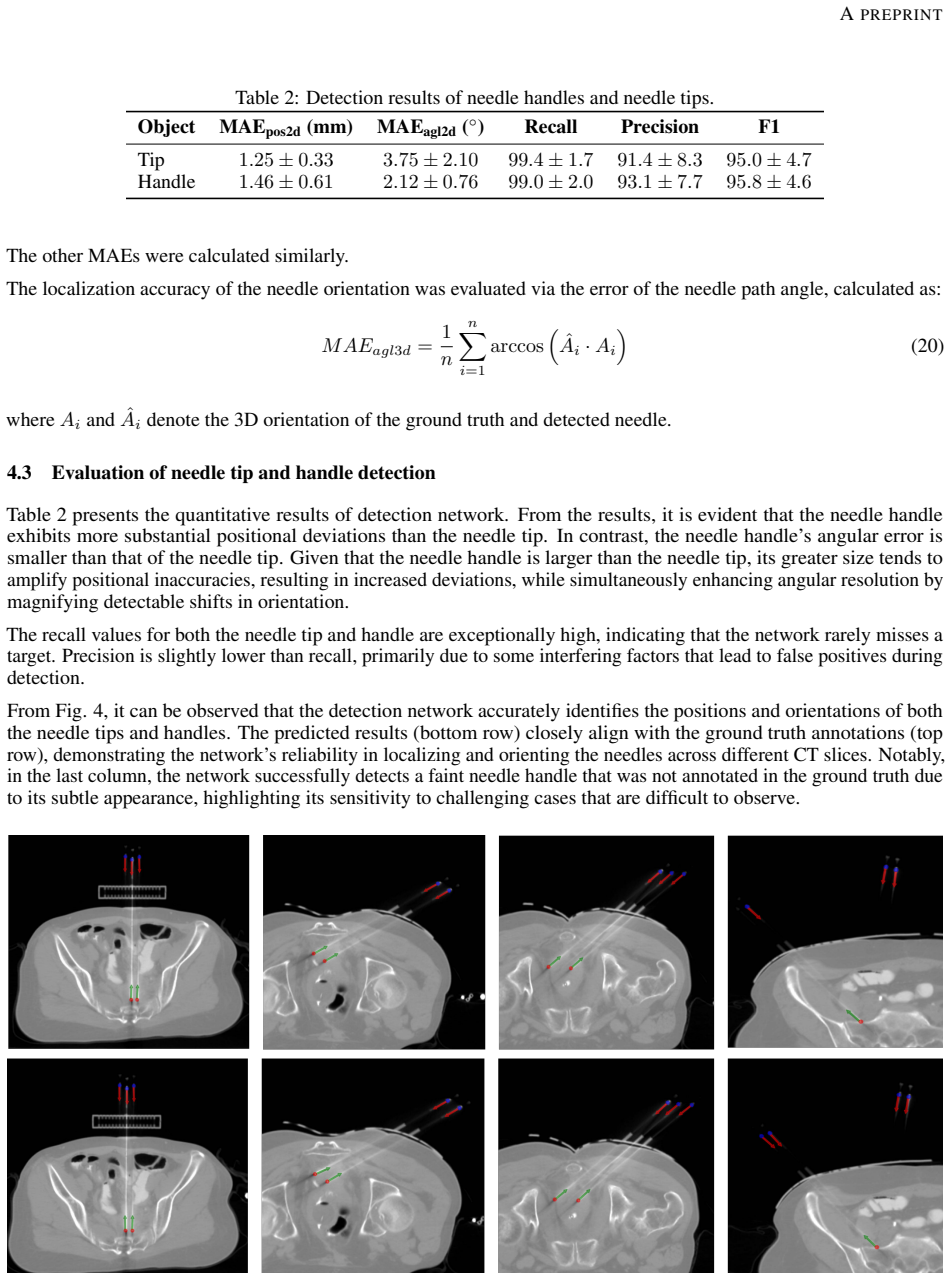
Summary. The manuscript reframes multi-needle localization in intraoperative CT for pelvic seed implant brachytherapy as a tip-handle detection and matching task. It proposes an anchor-free HRNet-based detector that predicts centers and orientations of tips and handles via decoupled heatmap and polar-angle branches, then applies a greedy matching and merging (GMM) algorithm to solve the unbalanced assignment problem with constraints (UAP-C) and reconstruct 3D needle paths. The central claim is that this yields higher precision and F1 score than nnUNet segmentation on a 100-patient dataset.
Significance. If the superiority claim is substantiated with quantitative results and robustness checks, the detection-plus-matching formulation could provide a practical alternative to segmentation in low-contrast, adhesive-needle scenarios common in brachytherapy, potentially improving localization accuracy for seed placement optimization.
major comments (2)
- [Abstract and §4] Abstract and §4 (Experiments): the headline claim of higher precision and F1 score versus nnUNet on 100 patients is stated without any numeric values, confidence intervals, dataset split details, statistical tests, or ablation tables. Because the performance advantage is the load-bearing result, the absence of these quantities prevents assessment of effect size or reliability.
- [§3.2] §3.2 (GMM method): the association step is presented as iteratively selecting tip-handle pairs by a distance metric to solve UAP-C, yet no ablation or stress test is reported on how the greedy procedure behaves under realistic false-positive rates from the detector or under needle adhesions in low-contrast CT. An incorrect pairing directly corrupts entire needle paths and would inflate or deflate the reported F1, making this a load-bearing unverified assumption for the superiority claim.
minor comments (1)
- [Abstract] Abstract: missing space after comma in 'nnUNet model,thereby'.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below and will incorporate revisions to improve the clarity and substantiation of our results.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Experiments): the headline claim of higher precision and F1 score versus nnUNet on 100 patients is stated without any numeric values, confidence intervals, dataset split details, statistical tests, or ablation tables. Because the performance advantage is the load-bearing result, the absence of these quantities prevents assessment of effect size or reliability.
Authors: We agree that the abstract would be strengthened by including key quantitative results to make the central claim self-contained. Detailed numeric comparisons (precision, F1 scores), dataset split information (5-fold cross-validation), and ablation tables are already present in §4. In the revised manuscript we will update the abstract to report the specific F1 and precision values along with a brief reference to the statistical tests and dataset protocol. revision: yes
-
Referee: [§3.2] §3.2 (GMM method): the association step is presented as iteratively selecting tip-handle pairs by a distance metric to solve UAP-C, yet no ablation or stress test is reported on how the greedy procedure behaves under realistic false-positive rates from the detector or under needle adhesions in low-contrast CT. An incorrect pairing directly corrupts entire needle paths and would inflate or deflate the reported F1, making this a load-bearing unverified assumption for the superiority claim.
Authors: We acknowledge that an explicit sensitivity analysis of the GMM step under controlled false-positive rates would provide additional reassurance. The reported results already reflect end-to-end performance on a 100-patient clinical dataset that contains low-contrast images and adhered needles. To directly address the concern we will add a targeted robustness experiment in the revised §3.2 / §4 that injects synthetic false positives and reports the resulting change in final needle-path F1. revision: yes
Circularity Check
No circularity: algorithmic pipeline is independent of its evaluation metrics
full rationale
The paper presents a detection-plus-matching pipeline (HRNet-based tip/handle detection followed by GMM for UAP-C) whose claimed superiority is measured by precision/F1 on a held-out 100-patient CT dataset against an external nnUNet baseline. No equations, fitted parameters, or self-citations are used to derive the performance numbers; the method steps are described as explicit algorithmic choices and the results are obtained by direct application to real images. The derivation chain therefore remains self-contained and does not reduce any claimed result to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption An anchor-free HRNet variant can reliably regress centers and orientations of needle tips and handles despite poor CT contrast and adhesions.
- domain assumption A greedy iterative selection of tip-handle pairs based on a distance metric will correctly reconstruct 3D needle paths without exhaustive search.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
An anchor-free network, based on HRNet, is proposed to extract multi-scale features and accurately detect needle tips and handles by predicting their centers and orientations using decoupled branches for heatmap regression and polar angle prediction. ... greedy matching and merging (GMM) method designed to solve the unbalanced assignment problem with constraints (UAP-C)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Siegel, Isabelle Soerjomataram, and Ahmedin Jemal
Freddie Bray, Mathieu Laversanne, Hyuna Sung, Jacques Ferlay, Rebecca L. Siegel, Isabelle Soerjomataram, and Ahmedin Jemal. Global cancer statistics 2022: GLOBOCAN estimates of incidence and mortality worldwide for 36 cancers in 185 countries.CA: A Cancer Journal for Clinicians, 74(3):229–263, May 2024
work page 2022
-
[2]
Hao Wang, Hong-Bing Shi, Wei-Guang Qiang, Chao Wang, Bai Sun, Ye Yuan, and Wen-Wei Hu. CT-guided Radioactive 125I Seed Implantation for Abdominal Incision Metastases of Colorectal Cancer: Safety and Efficacy in 17 Patients.Clinical Colorectal Cancer, 22(1):136–142, March 2023
work page 2023
-
[3]
Rafael Martínez-Monge, Subir Nag, and Edward W Martin. 125iodine brachytherapy for colorectal adenocar- cinoma recurrent in the pelvis and paraortics.International Journal of Radiation Oncology*Biology*Physics, 42(3):545–550, October 1998
work page 1998
-
[4]
Yuliang Jiang, Zhe Ji, Fuxin Guo, Ran Peng, Haitao Sun, Jinghong Fan, Shuhua Wei, Weiyan Li, Kai Liu, Jinghua Lei, and Junjie Wang. Side effects of CT-guided implantation of 125I seeds for recurrent malignant tumors of the head and neck assisted by 3D printing non co-planar template.Radiation Oncology, 13(1):18, December 2018
work page 2018
-
[5]
Alfredo Polo, Carl Salembier, Jack Venselaar, and Peter Hoskin. Review of intraoperative imaging and planning techniques in permanent seed prostate brachytherapy.Radiotherapy and Oncology, 94(1):12–23, January 2010
work page 2010
-
[6]
Subir Nag, Jay P Ciezki, Robert Cormack, Stephen Doggett, Keith DeWyngaert, Gregory K Edmundson, Richard G Stock, Nelson N Stone, Yan Yu, and Michael J Zelefsky. Intraoperative planning and evaluation of permanent prostate brachytherapy: Report of the American Brachytherapy Society.International Journal of Radiation Oncology*Biology*Physics, 51(5):1422–14...
work page 2001
-
[7]
Heslinga, Kemal Tuncali, Andriy Fedorov, Ron Kikinis, Clare M
Alireza Mehrtash, Mohsen Ghafoorian, Guillaume Pernelle, Alireza Ziaei, Friso G. Heslinga, Kemal Tuncali, Andriy Fedorov, Ron Kikinis, Clare M. Tempany, William M. Wells, Purang Abolmaesumi, and Tina Kapur. Automatic Needle Segmentation and Localization in MRI With 3-D Convolutional Neural Networks: Application to MRI-Targeted Prostate Biopsy.IEEE Transac...
work page 2019
-
[8]
Hyunuk Jung, Chenyang Shen, Yesenia Gonzalez, Kevin Albuquerque, and Xun Jia. Deep-learning assisted automatic digitization of interstitial needles in 3D CT image based high dose-rate brachytherapy of gynecological cancer.Physics in Medicine & Biology, 64(21):215003, October 2019
work page 2019
-
[9]
Yupei Zhang, Xiuxiu He, Zhen Tian, Jiwoong Jason Jeong, Yang Lei, Tonghe Wang, Qiulan Zeng, Ashesh B. Jani, Walter J. Curran, Pretesh Patel, Tian Liu, and Xiaofeng Yang. Multi-Needle Detection in 3D Ultrasound Images Using Unsupervised Order-Graph Regularized Sparse Dictionary Learning.IEEE Transactions on Medical Imaging, 39(7):2302–2315, July 2020
work page 2020
-
[10]
Yupei Zhang, Zhen Tian, Yang Lei, Tonghe Wang, Pretesh Patel, Ashesh B Jani, Walter J Curran, Tian Liu, and Xiaofeng Yang. Automatic multi-needle localization in ultrasound images using large margin mask RCNN for ultrasound-guided prostate brachytherapy.Physics in Medicine & Biology, 65(20):205003, October 2020
work page 2020
-
[11]
Xianjin Dai, Yang Lei, Yupei Zhang, Richard L.J. Qiu, Tonghe Wang, Sean A. Dresser, Walter J. Curran, Pretesh Patel, Tian Liu, and Xiaofeng Yang. Automatic multi-catheter detection using deeply supervised convolutional neural network in MRI-guided HDR prostate brachytherapy.Medical Physics, 47(9):4115–4124, September 2020
work page 2020
- [12]
-
[13]
Amanda M. Aleong, Alejandro Berlin, Jette Borg, Joelle Helou, Akbar Beiki-Ardakani, Alexandra Rink, Srinivas Raman, Peter Chung, and Robert A. Weersink. Rapid multi-catheter segmentation for magnetic resonance image-guided catheter-based interventions.Medical Physics, 51(8):5361–5373, August 2024
work page 2024
-
[14]
Amani Shaaer, Moti Paudel, Mackenzie Smith, Frances Tonolete, and Ananth Ravi. Deep-learning-assisted algorithm for catheter reconstruction during MR-only gynecological interstitial brachytherapy.Journal of Applied Clinical Medical Physics, 23(2):e13494, February 2022
work page 2022
-
[15]
William Thomas Hrinivich, Douglas A. Hoover, Kathleen Surry, Chandima Edirisinghe, Jacques Montreuil, David D’Souza, Aaron Fenster, and Eugene Wong. Simultaneous automatic segmentation of multiple needles using 3D ultrasound for high-dose-rate prostate brachytherapy.Medical Physics, 44(4):1234–1245, April 2017
work page 2017
-
[16]
Automatic needle segmentation in 3D ultrasound images using 3D improved Hough transform
Hua Zhou, Wu Qiu, Mingyue Ding, and Songgen Zhang. Automatic needle segmentation in 3D ultrasound images using 3D improved Hough transform. In Michael I. Miga and Kevin R. Cleary, editors,Medical Imaging, page 691821, San Diego, CA, March 2008
work page 2008
-
[17]
Wenqi Zhou, Xinzhou Li, Fatemeh Zabihollahy, David S. Lu, and Holden H. Wu. Deep learning-based automatic pipeline for 3D needle localization on intra-procedural 3D MRI.International Journal of Computer Assisted Radiology and Surgery, 19(11):2227–2237, March 2024
work page 2024
-
[18]
Hatt, Gary Ng, and Vijay Parthasarathy
Charles R. Hatt, Gary Ng, and Vijay Parthasarathy. Enhanced needle localization in ultrasound using beam steering and learning-based segmentation.Computerized Medical Imaging and Graphics, 41:46–54, April 2015
work page 2015
-
[19]
M. Barva, M. Uhercik, J.-M. Mari, J. Kybic, J.-R. Duhamel, H. Liebgott, V . Hlavac, and C. Cachard. Parallel integral projection transform for straight electrode localization in 3-D ultrasound images.IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 55(7):1559–1569, July 2008
work page 2008
-
[20]
Yongnan Zheng, Shan Jiang, Zhiyong Yang, and Lin Wei. Automatic needle detection using improved random sample consensus in CT image-guided lung interstitial brachytherapy.Journal of Applied Clinical Medical Physics, 22(4):121–131, April 2021
work page 2021
-
[21]
Nobuyuki Otsu. A Threshold Selection Method from Gray-Level Histograms.IEEE Transactions on Systems, Man, and Cybernetics, 9(1):62–66, January 1979
work page 1979
-
[22]
U-Net: Convolutional Networks for Biomedical Image Segmentation, May 2015
Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U-Net: Convolutional Networks for Biomedical Image Segmentation, May 2015
work page 2015
-
[23]
Fabian Isensee, Paul F. Jaeger, Simon A. A. Kohl, Jens Petersen, and Klaus H. Maier-Hein. nnU-Net: A self- configuring method for deep learning-based biomedical image segmentation.Nature Methods, 18(2):203–211, February 2021
work page 2021
-
[24]
Julia F. Barrett and Nicholas Keat. Artifacts in CT: Recognition and Avoidance.RadioGraphics, 24(6):1679–1691, November 2004
work page 2004
-
[25]
Object Detection in 20 Years: A Survey
Zhengxia Zou, Keyan Chen, Zhenwei Shi, Yuhong Guo, and Jieping Ye. Object Detection in 20 Years: A Survey. Proceedings of the IEEE, 111(3):257–276, March 2023
work page 2023
-
[26]
Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks.IEEE Transactions on Pattern Analysis and Machine Intelligence, 39(6):1137– 1149, June 2017. 14 APREPRINT
work page 2017
-
[27]
You Only Look Once: Unified, Real-Time Object Detection
Joseph Redmon, Santosh Divvala, Ross Girshick, and Ali Farhadi. You Only Look Once: Unified, Real-Time Object Detection. In2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 779–788, Las Vegas, NV , USA, June 2016. IEEE
work page 2016
-
[28]
Cornernet: Detecting objects as paired keypoints
Hei Law and Jia Deng. Cornernet: Detecting objects as paired keypoints. InProceedings of the European conference on computer vision (ECCV), pages 734–750, 2018
work page 2018
-
[29]
CenterNet: Keypoint Triplets for Object Detection
Kaiwen Duan, Song Bai, Lingxi Xie, Honggang Qi, Qingming Huang, and Qi Tian. CenterNet: Keypoint Triplets for Object Detection. In2019 IEEE/CVF International Conference on Computer Vision (ICCV), pages 6568–6577, Seoul, Korea (South), October 2019. IEEE
work page 2019
-
[30]
Wei Liu, Dragomir Anguelov, Dumitru Erhan, Christian Szegedy, Scott Reed, Cheng-Yang Fu, and Alexander C. Berg. SSD: Single Shot MultiBox Detector. volume 9905, pages 21–37. 2016
work page 2016
-
[31]
End-to-End Object Detection with Transformers, May 2020
Nicolas Carion, Francisco Massa, Gabriel Synnaeve, Nicolas Usunier, Alexander Kirillov, and Sergey Zagoruyko. End-to-End Object Detection with Transformers, May 2020
work page 2020
-
[32]
H. W. Kuhn. The Hungarian method for the assignment problem.Naval Research Logistics Quarterly, 2(1-2):83– 97, March 1955
work page 1955
-
[33]
Athanasios K. Ziliaskopoulos. A Linear Programming Model for the Single Destination System Optimum Dynamic Traffic Assignment Problem.Transportation Science, 34(1):37–49, February 2000
work page 2000
-
[34]
EURO Advanced Tutorials on Operational Research
Vittorio Maniezzo, Marco Antonio Boschetti, and Thomas Stützle.Matheuristics: Algorithms and Implementations. EURO Advanced Tutorials on Operational Research. Springer International Publishing, Cham, 2021
work page 2021
-
[35]
Joseph B. Mazzola. Generalized Assignment with Nonlinear Capacity Interaction.Management Science, 35(8):923–941, August 1989
work page 1989
-
[36]
Solving the Assignment problem using Genetic Algorithm and Simulated Annealing
Anshuman Sahu and Rudrajit Tapadar. Solving the Assignment problem using Genetic Algorithm and Simulated Annealing
-
[37]
Using simulated annealing for personnel assignment in railway nodes
Andrea Galadíková and Branislav ˇCasnocha. Using simulated annealing for personnel assignment in railway nodes. In2024 IEEE 17th International Scientific Conference on Informatics (Informatics), pages 69–74, Poprad, Slovakia, November 2024. IEEE
work page 2024
-
[38]
Doerner, Stefanie Rinderle-Ma, and Christian Weckenborg
Alexander Kinast, Roland Braune, Karl F. Doerner, Stefanie Rinderle-Ma, and Christian Weckenborg. A hybrid metaheuristic solution approach for the cobot assignment and job shop scheduling problem.Journal of Industrial Information Integration, 28:100350, July 2022
work page 2022
-
[39]
Fabian Schäfer, Manuel Walther, Dominik G. Grimm, and Alexander Hübner. Combining machine learning and optimization for the operational patient-bed assignment problem.Health Care Management Science, 26(4):785– 806, December 2023
work page 2023
-
[40]
Combinatorial Reinforcement Learning of Linear Assignment Problems
Sascha Hamzehi, Klaus Bogenberger, Philipp Franeck, and Bernd Kaltenhauser. Combinatorial Reinforcement Learning of Linear Assignment Problems. In2019 IEEE Intelligent Transportation Systems Conference (ITSC), pages 3314–3321, Auckland, New Zealand, October 2019. IEEE
work page 2019
-
[41]
The Weapon-Target Assignment Problem.Computers & Operations Research, 105:226–236, May 2019
Alexander Kline, Darryl Ahner, and Raymond Hill. The Weapon-Target Assignment Problem.Computers & Operations Research, 105:226–236, May 2019
work page 2019
-
[42]
Deep Reinforcement Learning for Fairness in Distributed Robotic Multi-type Resource Allocation
Qinyun Zhu and Jae Oh. Deep Reinforcement Learning for Fairness in Distributed Robotic Multi-type Resource Allocation. In2018 17th IEEE International Conference on Machine Learning and Applications (ICMLA), pages 460–466, Orlando, FL, December 2018. IEEE
work page 2018
-
[43]
Deep High-Resolution Representation Learning for Human Pose Estimation
Ke Sun, Bin Xiao, Dong Liu, and Jingdong Wang. Deep High-Resolution Representation Learning for Human Pose Estimation. In2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 5686–5696, Long Beach, CA, USA, June 2019. IEEE
work page 2019
-
[44]
Xingyi Zhou, Dequan Wang, and Philipp Krähenbühl. Objects as points.arXiv preprint arXiv:1904.07850, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1904
-
[45]
Nguyen, Haichun Yang, Ruining Deng, Yuzhe Lu, Zheyu Zhu, Joseph T
Ethan H. Nguyen, Haichun Yang, Ruining Deng, Yuzhe Lu, Zheyu Zhu, Joseph T. Roland, Le Lu, Bennett A. Landman, Agnes B. Fogo, and Yuankai Huo. Circle Representation for Medical Object Detection.IEEE Transactions on Medical Imaging, 41(3):746–754, March 2022
work page 2022
-
[46]
Deformable convolutional networks
Jifeng Dai, Haozhi Qi, Yuwen Xiong, Yi Li, Guodong Zhang, Han Hu, and Yichen Wei. Deformable convolutional networks. InProceedings of the IEEE international conference on computer vision, pages 764–773, 2017
work page 2017
-
[47]
Focal Loss for Dense Object Detection
Tsung-Yi Lin, Priya Goyal, Ross Girshick, Kaiming He, and Piotr Dollar. Focal Loss for Dense Object Detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 42(2):318–327, February 2020. 15 APREPRINT
work page 2020
-
[48]
Arbitrary-Oriented Object Detection with Circular Smooth Label
Xue Yang and Junchi Yan. Arbitrary-Oriented Object Detection with Circular Smooth Label. In Andrea Vedaldi, Horst Bischof, Thomas Brox, and Jan-Michael Frahm, editors,Computer Vision – ECCV 2020, volume 12353, pages 677–694. Springer International Publishing, Cham, 2020
work page 2020
-
[49]
Bradley C. Lowekamp, David T. Chen, Luis Ibáñez, and Daniel Blezek. The Design of SimpleITK.Frontiers in Neuroinformatics, 7, 2013
work page 2013
-
[50]
Harol Mauricio Gámez Albán, Trijntje Cornelissens, and Kenneth Sörensen. A new policy for scattered storage assignment to minimize picking travel distances.European Journal of Operational Research, 315(3):1006–1020, June 2024. 16
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.