Evaluation of Grid-based Uncertainty Propagation for Collaborative Self-Calibration in Indoor Positioning Systems
Pith reviewed 2026-05-17 22:12 UTC · model grok-4.3
The pith
Collaborative self-calibration using grid-based uncertainty propagation achieves sub-meter accuracy in UWB indoor networks without pre-surveyed anchors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
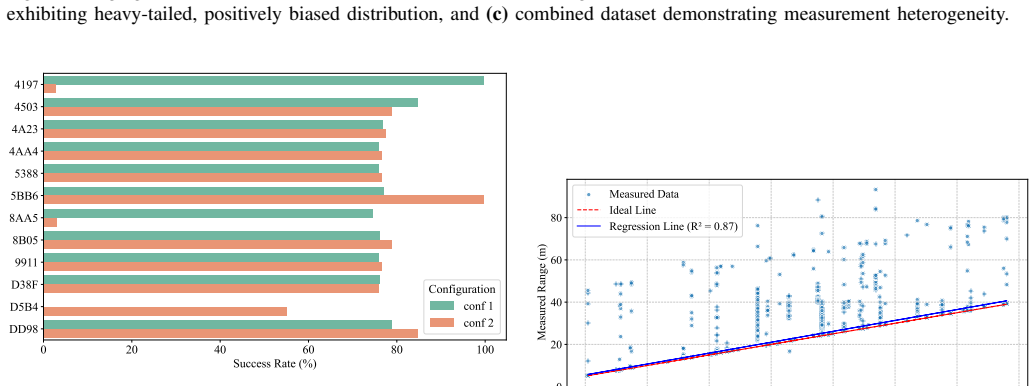
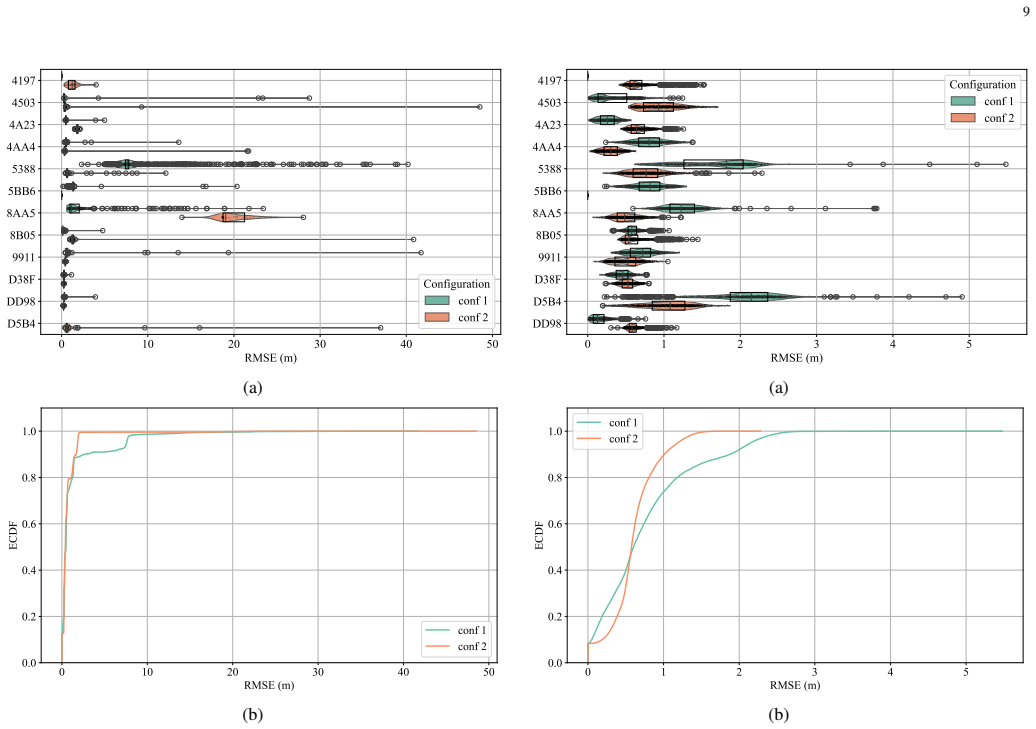
The enhanced algorithm reduces measurement availability requirements while maintaining positioning accuracy through probabilistic state estimation, as shown by real-world tests yielding 0.28 m mean ranging error under line-of-sight conditions and 1.11 m overall ranging error across mixed propagation scenarios, achieving sub-meter positioning accuracy in a static 12-node UWB network.
What carries the argument
grid-based uncertainty propagation inside a discrete Bayesian framework that performs probabilistic state estimation for collaborative self-calibration
If this is right
- The method supports automated UWB network initialization that cuts reliance on manual anchor surveying.
- It maintains accuracy despite measurement noise and incomplete node connectivity common in industrial spaces.
- Lowered measurement needs allow calibration even when some links are unavailable.
Where Pith is reading between the lines
- The same grid propagation idea might be tested on moving nodes to see whether accuracy holds when the static assumption is dropped.
- Combining this self-calibration with other radio technologies could address coverage gaps in larger buildings.
- Sparse networks with fewer than twelve nodes could be tried to check the lower limit of required connectivity.
Load-bearing premise
The validation assumes a static environment with fixed nodes and no moving objects or people during calibration.
What would settle it
Running the same calibration procedure in an environment with moving people or objects and observing errors well above one meter or failure to converge would show the method does not hold under dynamic conditions.
Figures









read the original abstract
Radio-based localization systems conventionally require stationary reference points (e.g. anchors) with precisely surveyed positions, making deployment time-consuming and costly. This paper presents an empirical evaluation of collaborative self-calibration for Ultra-Wideband (UWB) networks, extending a discrete Bayesian approach based on grid-based uncertainty propagation. The enhanced algorithm reduces measurement availability requirements while maintaining positioning accuracy through probabilistic state estimation. We validate the approach using real-world data from controlled indoor UWB network experiments with 12 nodes in a static environment. Experimental evaluation demonstrates 0.28~m mean ranging error under line-of-sight conditions and 1.11~m overall ranging error across mixed propagation scenarios, achieving sub-meter positioning accuracy. Results demonstrate the algorithm's robustness to measurement noise and partial connectivity scenarios typical in industrial deployments. The findings contribute to automated UWB network initialization for indoor positioning applications, reducing infrastructure dependency compared to manual anchor calibration procedures.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents an empirical evaluation of a grid-based uncertainty propagation method for collaborative self-calibration in UWB networks. Extending a discrete Bayesian approach, the method aims to reduce measurement availability requirements while preserving positioning accuracy via probabilistic state estimation. Validation uses real-world ranging data from a controlled 12-node static indoor experiment, reporting 0.28 m mean ranging error under LOS conditions, 1.11 m overall across mixed scenarios, and sub-meter positioning accuracy, with claims of robustness to noise and partial connectivity typical in industrial deployments.
Significance. If the accuracy metrics hold under the reported conditions, the work supports automated UWB network initialization, lowering reliance on manual anchor surveying and contributing to practical indoor positioning. Strengths include use of independent real-world ranging data and a parameter-light grid-based formulation; however, the static validation limits direct applicability to dynamic industrial settings.
major comments (2)
- [Abstract / Experimental Evaluation] Abstract and Experimental Evaluation section: The robustness claim for 'measurement noise and partial connectivity scenarios typical in industrial deployments' rests on a static 12-node experiment with fixed nodes and no moving scatterers or time-varying multipath; this assumption is load-bearing for the industrial-readiness assertion, as unmodeled dynamics would invalidate the stationary likelihood model underlying the uncertainty propagation.
- [Experimental Evaluation] Experimental Evaluation section: The reported error metrics (0.28 m LOS, 1.11 m mixed) lack visible error bars, data exclusion criteria, and statistical significance tests, which directly affects confidence in the central accuracy and robustness claims.
minor comments (2)
- [Method] Clarify the grid resolution parameter and its sensitivity in the method description to aid reproducibility.
- [Algorithm Description] Add explicit discussion of how partial connectivity is handled in the probabilistic update step.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and have updated the manuscript to improve the clarity of our claims and the statistical rigor of the results.
read point-by-point responses
-
Referee: [Abstract / Experimental Evaluation] Abstract and Experimental Evaluation section: The robustness claim for 'measurement noise and partial connectivity scenarios typical in industrial deployments' rests on a static 12-node experiment with fixed nodes and no moving scatterers or time-varying multipath; this assumption is load-bearing for the industrial-readiness assertion, as unmodeled dynamics would invalidate the stationary likelihood model underlying the uncertainty propagation.
Authors: We agree that the validation uses a static 12-node setup without moving scatterers or time-varying multipath. The reported robustness specifically addresses measurement noise (via the grid-based probabilistic propagation) and partial connectivity (via performance evaluation on subsets of the available ranges in the fixed network). We have revised the abstract and Experimental Evaluation section to explicitly limit the robustness claims to static conditions with varying noise levels and connectivity, removed the phrasing implying full industrial readiness, and added a paragraph discussing the stationary likelihood assumption as a limitation for dynamic scenarios. revision: partial
-
Referee: [Experimental Evaluation] Experimental Evaluation section: The reported error metrics (0.28 m LOS, 1.11 m mixed) lack visible error bars, data exclusion criteria, and statistical significance tests, which directly affects confidence in the central accuracy and robustness claims.
Authors: We have revised the Experimental Evaluation section to include error bars (standard deviation across repeated trials and node pairs), explicit data exclusion criteria (outliers with ranging error >5 m removed, representing <2% of data), and statistical significance testing (paired t-tests against a non-Bayesian baseline, with p<0.01 reported for the LOS improvement). These changes strengthen the presentation of the 0.28 m and 1.11 m figures. revision: yes
Circularity Check
No circularity: results from independent real-world ranging measurements
full rationale
The paper reports an empirical evaluation of collaborative self-calibration using grid-based uncertainty propagation on real UWB ranging data collected from a static 12-node indoor experiment. Reported metrics (0.28 m LOS mean ranging error, 1.11 m mixed-scenario error, sub-meter positioning) are computed directly from measured distances and positioning outcomes rather than from any fitted parameter renamed as a prediction, self-definitional loop, or load-bearing self-citation. The derivation chain applies the probabilistic state estimation to external data without reducing the accuracy claims to the inputs by construction; the method is validated against independent observations under the stated static conditions.
Axiom & Free-Parameter Ledger
free parameters (1)
- grid resolution
axioms (2)
- domain assumption The indoor environment remains static with fixed node positions during the calibration phase.
- domain assumption Range measurements follow a probabilistic model suitable for grid-based propagation.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
grid-based uncertainty propagation... weighted contributions from multiple position hypotheses... Li(gm) = product over j of sum over hypotheses w_jl * exp(-(||gm - g_jl||^2 - z_ij)^2 / 2 sigma_r^2)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
12 nodes... static environment... 0.28 m mean ranging error under LOS
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
T. G. Hailu, X. Guo, H. Si, L. Li, and Y . Zhang, “Theories and methods for indoor positioning systems: A comparative analysis, challenges, and prospective measures,” inSensors, vol. 24, no. 21. MDPI, 2024, p. 6876
work page 2024
-
[2]
Multihop self-calibration algorithm for ultra-wideband (uwb) anchor node positioning,
B. Van Herbruggen, S. Luchie, J. Fontaine, and E. De Poorter, “Multihop self-calibration algorithm for ultra-wideband (uwb) anchor node positioning,”IEEE Journal of Indoor and Seamless Positioning and Navigation, vol. 1, pp. 1–11, 2023. [Online]. Available: https://ieeexplore.ieee.org/document/10124958
-
[3]
A survey of calibration-free indoor posi- tioning systems,
A. Hossain and W.-S. Soh, “A survey of calibration-free indoor posi- tioning systems,”Computer Communications, vol. 66, pp. 1–13, 2015
work page 2015
-
[4]
Survey of indoor localization based on deep learning,
K. A. Kordi, M. Roslee, M. Y . Alias, A. Alhammadi, A. Waseem, and A. F. Osman, “Survey of indoor localization based on deep learning,” Computers, Materials & Continua, vol. 79, no. 2, p. 3261–3298, 2024. [Online]. Available: http://dx.doi.org/10.32604/cmc.2024.044890
-
[5]
M. Ridolfi, A. Kaya, R. Berkvens, M. Weyn, W. Joseph, and E. D. Poorter, “Self-calibration and Collaborative Localization for UWB Positioning Systems: A Survey and Future Research Directions,”ACM Comput. Surv., vol. 54, no. 4, pp. 88:1–88:27, May 2021. [Online]. Available: https://dl.acm.org/doi/10.1145/3448303
-
[6]
Cooperative Localization in Wireless Networks,
H. Wymeersch, J. Lien, and M. Z. Win, “Cooperative Localization in Wireless Networks,”Proceedings of the IEEE, vol. 97, no. 2, pp. 427– 450, Feb. 2009, conference Name: Proceedings of the IEEE
work page 2009
-
[7]
Calibration and Compensation of Anchor Positions for UWB Indoor Localization,
M. Qi, B. Xue, and W. Wang, “Calibration and Compensation of Anchor Positions for UWB Indoor Localization,”IEEE Sensors Journal, vol. 24, no. 1, pp. 689–699, Jan. 2024, conference Name: IEEE Sensors Journal. [Online]. Available: https://ieeexplore.ieee.org/ document/10325421/?arnumber=10325421
-
[8]
L. Xu, Z. Li, and X. Li, “A Hybrid Approach Using Multistage Collaborative Calibration for Wireless Sensor Network Localization in 3D Environments,”IEEE Access, vol. 8, pp. 130 205–130 223, 2020. [Online]. Available: https://ieeexplore.ieee.org/document/9139987/
-
[9]
WiFi-RTT Posterity SLAM for Pedestrian Navigation in Indoor Environments,
K. J. Raja and P. D. Groves, “WiFi-RTT Posterity SLAM for Pedestrian Navigation in Indoor Environments,” inION GNSS+, The International Technical Meeting of the Satellite Division of The Institute of Navigation. Baltimore, Maryland: Institute of Navigation, Oct. 2024, pp. 1864–1877, iSSN: 2331-5954. [Online]. Available: https://www.ion.org/publications/ab...
work page 2024
-
[10]
Bayesian Filtering for Joint Multi-User Positioning, Synchronization and Anchor State Calibration,
Y . Lu, O. Kaltiokallio, M. Koivisto, J. Talvitie, E. S. Lohan, H. Wymeersch, and M. Valkama, “Bayesian Filtering for Joint Multi-User Positioning, Synchronization and Anchor State Calibration,” IEEE Transactions on Vehicular Technology, vol. 72, no. 8, pp. 10 949–10 964, Aug. 2023, conference Name: IEEE Transactions on Vehicular Technology. [Online]. Ava...
-
[11]
Robust and Adaptive Calibration of UWB-Aided Vision Navigation System for UA Vs,
J. Hu, Y . Li, Y . Lei, Z. Xu, M. Lv, and J. Han, “Robust and Adaptive Calibration of UWB-Aided Vision Navigation System for UA Vs,”IEEE Robotics and Automation Letters, vol. 8, no. 12, pp. 8247–8254, Dec. 2023, conference Name: IEEE Robotics and Automation Letters. [Online]. Available: https://ieeexplore.ieee.org/ document/10288387/?arnumber=10288387
-
[12]
Fast and robust anchor calibration in range-based wireless localization,
S. Van de Velde, P. Van Torre, and H. Steendam, “Fast and robust anchor calibration in range-based wireless localization,” in2013, 7th International Conference on Signal Processing and Communication Systems (ICSPCS), Dec. 2013, pp. 1–6. [Online]. Available: https: //ieeexplore.ieee.org/document/6723945/?arnumber=6723945
-
[13]
Anchor Calibration for Real-Time- Measurement Localization Systems,
P. Krapez and M. Munih, “Anchor Calibration for Real-Time- Measurement Localization Systems,”IEEE Transactions on Instrumen- tation and Measurement, vol. 69, no. 12, pp. 9907–9917, Dec. 2020. [Online]. Available: https://ieeexplore.ieee.org/document/9127780/
-
[14]
Self-Calibrating Ultra-Wideband Network Supporting Multi-Robot Localization,
M. Hamer and R. D’Andrea, “Self-Calibrating Ultra-Wideband Network Supporting Multi-Robot Localization,”IEEE Access, vol. 6, pp. 22 292– 22 304, 2018, conference Name: IEEE Access
work page 2018
-
[15]
Rapid De- ployment of Ultra-Wideband Indoor Positioning System,
P. Loahavilai, C. Thanapirom, P. Rattanawan, T. Chulapakorn, S. Yan- wicharaporn, C. Kingkan, K. Prasertsuk, and N. Cota, “Rapid De- ployment of Ultra-Wideband Indoor Positioning System,” in2021 18th International Joint Conference on Computer Science and Software Engineering (JCSSE), Jun. 2021, pp. 1–6, iSSN: 2642-6579
work page 2021
-
[16]
M. Ridolfi, J. Fontaine, B. V . Herbruggen, W. Joseph, J. Hoebeke, and E. D. Poorter, “UWB anchor nodes self-calibration in NLOS conditions: a machine learning and adaptive PHY error correction approach,” Wireless Networks, vol. 27, no. 4, pp. 3007–3023, May 2021. [Online]. Available: https://link.springer.com/10.1007/s11276-021-02631-0
-
[17]
LGSVL simulator: A high fidelity simulator for autonomous driving,
D. Medina, L. Grundhofer, and N. Hehenkamp, “Evaluation of estimators for hybrid GNSS-terrestrial localization in collaborative networks,” in2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). IEEE, Sep. 2020. [Online]. Available: https://doi.org/10.1109/itsc45102.2020.9294750
-
[18]
Auto-Positioning in Radio- based Localization Systems: A Bayesian Approach,
A. Jung, P. Schwarzbach, and O. Michler, “Auto-Positioning in Radio- based Localization Systems: A Bayesian Approach,” in2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sep. 2022, pp. 1–7, iSSN: 2471-917X. [Online]. Available: https://ieeexplore.ieee.org/document/9917513/?arnumber=9917513
-
[19]
R. G. Brown and P. Y . C. Hwang,Introduction to Random Signals and Applied Kalman Filtering: with MATLAB Exercises, 4th ed. Hoboken, NJ: John Wiley & Sons, 2012
work page 2012
-
[20]
Leica TS16 Totalstation – Einfach vermessen
L. G. AG, “Leica TS16 Totalstation – Einfach vermessen.” [Online]. Available: https://leica-geosystems.com/de-de/products/total-stations/ robotic-total-stations/leica-ts16
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.