Perception-aware Exploration for Consumer-grade UAVs
Pith reviewed 2026-05-17 21:06 UTC · model grok-4.3
The pith
Consumer-grade UAVs like the DJI Mini 3 Pro can autonomously explore and map environments through viewpoint selection and motion-constrained trajectories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
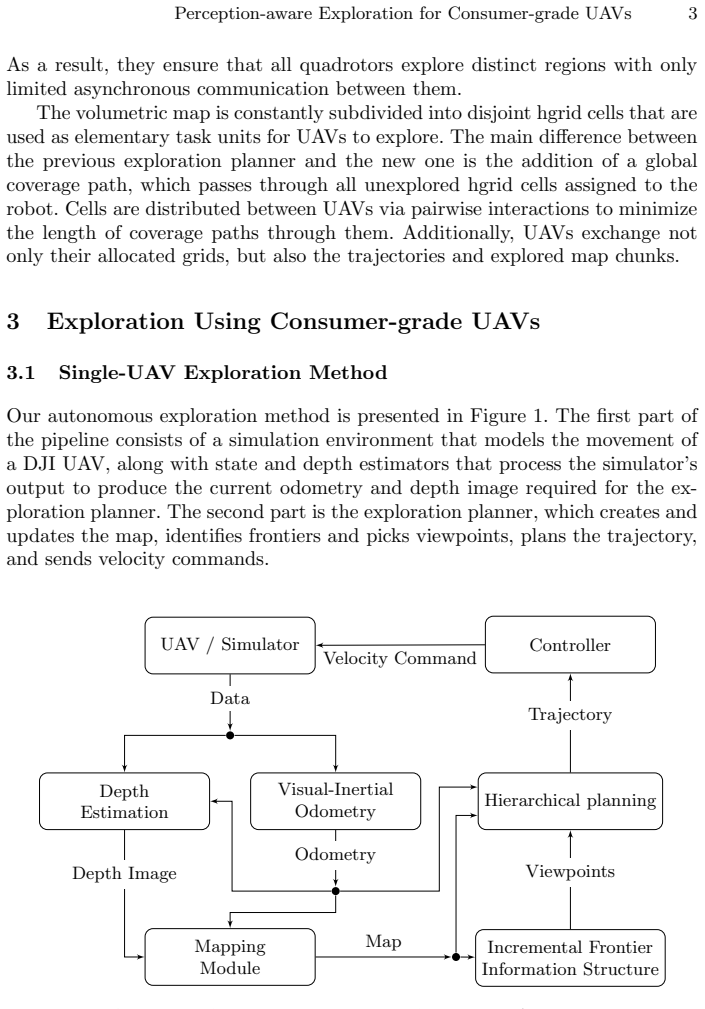
We extend state-of-the-art autonomous multi-UAV exploration to consumer-level UAVs such as the DJI Mini 3 Pro by proposing a pipeline that selects viewpoint pairs from which depth can be estimated and plans trajectories that satisfy the motion constraints required for odometry estimation; a semi-distributed communication scheme distributes the workload in a balanced manner; and evaluation in simulation demonstrates safe exploration and map reconstruction even under the hardware limitations of these platforms.
What carries the argument
A viewpoint-pair selection and motion-constrained trajectory planning pipeline that enables depth estimation and odometry on consumer UAVs while a semi-distributed scheme balances exploration workload across agents.
If this is right
- Multiple consumer UAVs can divide an unknown space, select complementary viewpoints, and produce a joint map without centralized high-bandwidth links.
- The same viewpoint-pair and motion-constraint logic can be reused on other low-cost platforms whose cameras and flight controllers match the DJI Mini 3 Pro profile.
- Exploration time scales with team size while each agent stays within its native speed and turning limits.
- Map completeness remains high even when individual agents have narrow fields of view and limited depth sensing.
Where Pith is reading between the lines
- The approach could extend to mixed teams where some agents carry higher-end sensors to compensate for the limitations of the consumer-grade majority.
- Outdoor wind or lighting changes might require tighter bounds on the motion constraints or additional visual-inertial fusion not tested in simulation.
- The balanced workload scheme might generalize to other tasks such as persistent monitoring once exploration finishes.
Load-bearing premise
Consumer-grade UAVs can reliably execute the precise motion sequences needed for visual odometry without additional unmodeled hardware failures or environmental disturbances.
What would settle it
A real-world flight test on a DJI Mini 3 Pro in an unknown indoor or outdoor space where the UAV fails to maintain stable odometry or produces incomplete maps despite following the planned trajectories.
Figures



read the original abstract
In our work, we extend the current state-of-the-art approach for autonomous multi-UAV exploration to consumer-level UAVs, such as the DJI Mini 3 Pro. We propose a pipeline that selects viewpoint pairs from which the depth can be estimated and plans the trajectory that satisfies motion constraints necessary for odometry estimation. For the multi-UAV exploration, we propose a semi-distributed communication scheme that distributes the workload in a balanced manner. We evaluate our model performance in simulation for different numbers of UAVs and prove its ability to safely explore the environment and reconstruct the map even with the hardware limitations of consumer-grade UAVs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends state-of-the-art autonomous multi-UAV exploration methods to consumer-grade platforms such as the DJI Mini 3 Pro. It proposes a pipeline for selecting viewpoint pairs from which depth can be estimated, trajectory planning that satisfies motion constraints required for odometry estimation, and a semi-distributed communication scheme for balanced workload distribution. The approach is evaluated in simulation across different numbers of UAVs and claims to enable safe exploration and map reconstruction despite hardware limitations.
Significance. If the simulation results transfer to physical hardware, the work would be significant for making perception-aware multi-UAV exploration practical with affordable consumer UAVs rather than specialized platforms. The emphasis on motion constraints for odometry and semi-distributed coordination directly addresses real deployment barriers. The current simulation-only evaluation with no quantitative metrics or real-flight validation, however, substantially limits the assessed significance.
major comments (2)
- [Evaluation section] Evaluation section: The manuscript reports simulation success for safe exploration and map reconstruction but provides no quantitative results (e.g., coverage rates, reconstruction error, odometry drift), error analysis, or implementation details. This directly undermines verification of the central claim that the pipeline works 'even with the hardware limitations of consumer-grade UAVs'.
- [Trajectory planning] Trajectory planning and abstract: The approach plans trajectories satisfying motion constraints for odometry estimation on the DJI Mini 3 Pro, yet no details are given on how these constraints are derived from the target airframe, no commanded-vs-achieved trajectory comparisons, and no sensitivity analysis to unmodeled effects (propeller lag, wind, sensor latency). This is load-bearing for the claim that consumer-grade UAVs can reliably execute the required motions.
minor comments (1)
- [Abstract] Abstract: The phrasing 'prove its ability' is strong for simulation-only results; 'demonstrate' would be more precise.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments correctly identify gaps in quantitative evaluation and trajectory details that we will address through revision to better support the claims for consumer-grade UAVs. Point-by-point responses follow.
read point-by-point responses
-
Referee: [Evaluation section] Evaluation section: The manuscript reports simulation success for safe exploration and map reconstruction but provides no quantitative results (e.g., coverage rates, reconstruction error, odometry drift), error analysis, or implementation details. This directly undermines verification of the central claim that the pipeline works 'even with the hardware limitations of consumer-grade UAVs'.
Authors: We agree that the evaluation would benefit from quantitative metrics. The original manuscript demonstrates feasibility via successful simulation runs across UAV counts but lacks explicit numbers for coverage, reconstruction error, odometry drift, and implementation parameters. In revision we will expand the Evaluation section with these metrics, error analysis, and simulation setup details to strengthen verification of the hardware-limitation claims. revision: yes
-
Referee: [Trajectory planning] Trajectory planning and abstract: The approach plans trajectories satisfying motion constraints for odometry estimation on the DJI Mini 3 Pro, yet no details are given on how these constraints are derived from the target airframe, no commanded-vs-achieved trajectory comparisons, and no sensitivity analysis to unmodeled effects (propeller lag, wind, sensor latency). This is load-bearing for the claim that consumer-grade UAVs can reliably execute the required motions.
Authors: We acknowledge the missing details. Motion constraints were derived from DJI Mini 3 Pro specifications and visual-inertial odometry requirements, but derivation, comparisons, and sensitivity were not reported. The revised manuscript will specify the exact constraint values, include commanded-versus-achieved trajectory data from simulation, and add discussion of unmodeled effects such as propeller lag and sensor latency. revision: yes
- Real-flight validation on physical DJI Mini 3 Pro hardware, as all results remain simulation-based and new physical experiments cannot be added in revision.
Circularity Check
No significant circularity; derivation extends cited SOTA with independent adaptations
full rationale
The paper describes a pipeline that selects viewpoint pairs for depth estimation and plans trajectories satisfying motion constraints for odometry, extending prior multi-UAV exploration methods to consumer-grade platforms like the DJI Mini 3 Pro. It incorporates a semi-distributed communication scheme and evaluates in simulation under modeled hardware limits. No load-bearing step reduces by construction to its own inputs via self-definition, fitted parameters renamed as predictions, or self-citation chains that lack independent verification. The central claims retain external content from cited state-of-the-art approaches and do not rely on ansatzes or uniqueness theorems imported from the authors' prior work. The derivation is therefore self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp
Cieslewski, T., Kaufmann, E., Scaramuzza, D.: Rapid exploration with multi- rotors: A frontier selection method for high speed flight. In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2135–
work page 2017
-
[2]
In: 2020 IEEE international conference on robotics and automation (ICRA), pp
Dai, A., Papatheodorou, S., Funk, N., Tzoumanikas, D., Leutenegger, S.: Fast frontier-based information-driven autonomous exploration with an mav. In: 2020 IEEE international conference on robotics and automation (ICRA), pp. 9570–9576. IEEE (2020)
work page 2020
-
[3]
Jour- nal of Field Robotics37(8), 1363–1388 (2020)
Dang, T., Tranzatto, M., Khattak, S., Mascarich, F., Alexis, K., Hutter, M.: Graph- based subterranean exploration path planning using aerial and legged robots. Jour- nal of Field Robotics37(8), 1363–1388 (2020)
work page 2020
-
[4]
arXiv preprint arXiv:2011.05288 (2020)
Deng, D., Xu, Z., Zhao, W., Shimada, K.: Frontier-based automatic-differentiable information gain measure for robotic exploration of unknown 3d environments. arXiv preprint arXiv:2011.05288 (2020)
-
[5]
In: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp
Han, L., Gao, F., Zhou, B., Shen, S.: Fiesta: Fast incremental euclidean distance fields for online motion planning of aerial robots. In: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4423–4430. IEEE (2019)
work page 2019
-
[6]
In: 2015 IEEE International Conference on Robotics and Automation (ICRA), pp
Heng, L., Gotovos, A., Krause, A., Pollefeys, M.: Efficient visual exploration and coverage with a micro aerial vehicle in unknown environments. In: 2015 IEEE International Conference on Robotics and Automation (ICRA), pp. 1071–1078. IEEE (2015) 10 Svetlana Seliunina et al
work page 2015
-
[7]
Journal of Field Robotics31(4), 654–675 (2014)
Heng, L., Honegger, D., Lee, G.H., Meier, L., Tanskanen, P., Fraundorfer, F., Polle- feys, M.: Autonomous visual mapping and exploration with a micro aerial vehicle. Journal of Field Robotics31(4), 654–675 (2014)
work page 2014
-
[8]
Autonomous Robots33, 427–444 (2012)
Juli´ a, M., Gil, A., Reinoso, O.: A comparison of path planning strategies for autonomous exploration and mapping of unknown environments. Autonomous Robots33, 427–444 (2012)
work page 2012
-
[9]
In: European Conference on Computer Vision, pp
Leroy, V., Cabon, Y., Revaud, J.: Grounding image matching in 3d with mast3r. In: European Conference on Computer Vision, pp. 71–91. Springer (2024)
work page 2024
-
[10]
Towards Search-based Motion Planning for Micro Aerial Vehicles
Liu, S., Mohta, K., Atanasov, N., Kumar, V.: Towards search-based motion plan- ning for micro aerial vehicles. arXiv preprint arXiv:1810.03071 (2018)
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[11]
In: 2017 IEEE international conference on robotics and automation (ICRA), pp
Papachristos, C., Khattak, S., Alexis, K.: Uncertainty-aware receding horizon ex- ploration and mapping using aerial robots. In: 2017 IEEE international conference on robotics and automation (ICRA), pp. 4568–4575. IEEE (2017)
work page 2017
-
[12]
IEEE Inter- national Symposium on Safety, Security, and Rescue Robotics (SSRR) (2025)
Schleich, D., Quenzel, J., Behnke, S.: Autonomous consumer-grade uavs for real- time situational awareness in gnss-denied search & rescue operations. IEEE Inter- national Symposium on Safety, Security, and Rescue Robotics (SSRR) (2025)
work page 2025
-
[13]
IEEE Robotics and Automation Letters5(2), 1500–1507 (2020)
Schmid, L., Pantic, M., Khanna, R., Ott, L., Siegwart, R., Nieto, J.: An efficient sampling-based method for online informative path planning in unknown environ- ments. IEEE Robotics and Automation Letters5(2), 1500–1507 (2020)
work page 2020
-
[14]
Smith, N., Moehrle, N., Goesele, M., Heidrich, W.: Aerial path planning for urban scene reconstruction: A continuous optimization method and benchmark (2018)
work page 2018
-
[15]
In: Proceedings of the 2020 Conference on Robot Learning, pp
Song, Y., Naji, S., Kaufmann, E., Loquercio, A., Scaramuzza, D.: Flightmare: A flexible quadrotor simulator. In: Proceedings of the 2020 Conference on Robot Learning, pp. 1147–1157 (2021)
work page 2020
-
[16]
IEEE Transactions on Robotics39(3), 1816–1835 (2023)
Zhou, B., Xu, H., Shen, S.: Racer: Rapid collaborative exploration with a de- centralized multi-uav system. IEEE Transactions on Robotics39(3), 1816–1835 (2023)
work page 2023
-
[17]
IEEE Robotics and Automation Letters6(2), 779–786 (2021)
Zhou, B., Zhang, Y., Chen, X., Shen, S.: Fuel: Fast uav exploration using incremen- tal frontier structure and hierarchical planning. IEEE Robotics and Automation Letters6(2), 779–786 (2021)
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.