Certifiable Alignment of GNSS and Local Frames via Lagrangian Duality
Pith reviewed 2026-05-21 17:38 UTC · model grok-4.3
The pith
A Lagrangian dual relaxation yields certifiable global optimality for GNSS-local frame alignment even with two Doppler satellites in 2D motion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By converting the GNSS-local frame alignment task into a nonconvex QCQP and solving its Lagrangian dual relaxation, the authors establish sufficient conditions under which the dual solution coincides with the original problem's optimum, enabling certification of global optimality for alignments based on Doppler or pseudo-range data from as few as two satellites during two-dimensional motion.
What carries the argument
The concave Lagrangian dual of the nonconvex QCQP formulation for frame alignment, which supplies a computable lower bound and allows tightness checks to certify optimality.
If this is right
- The alignment solution can be certified as optimal simply by checking whether the dual lower bound matches the primal cost.
- Certifiably correct alignments become available in GNSS-degraded settings that contain only two usable Doppler measurements.
- Local optimization routines such as velocity-based VOBA or GVINS may return undetected suboptimal points in the same minimal-data regime.
- The derived observability conditions give explicit rules for when the certification procedure is guaranteed to succeed.
Where Pith is reading between the lines
- The same duality construction could be adapted to fuse GNSS data with additional inertial or visual measurements to reduce the satellite requirement further.
- Similar Lagrangian relaxations might certify optimality in other nonconvex pose-estimation problems that currently rely on local solvers.
- The tightness criteria could be tightened or generalized by incorporating higher-order motion models or additional measurement types.
Load-bearing premise
The relaxation tightness and observability criteria derived in the paper remain valid under the minimal conditions of two Doppler satellites and two-dimensional vehicle motion.
What would settle it
A concrete counterexample consisting of two Doppler satellites and planar motion in which a feasible primal solution achieves a strictly lower cost than the computed dual bound would disprove the claimed tightness guarantee.
Figures







read the original abstract
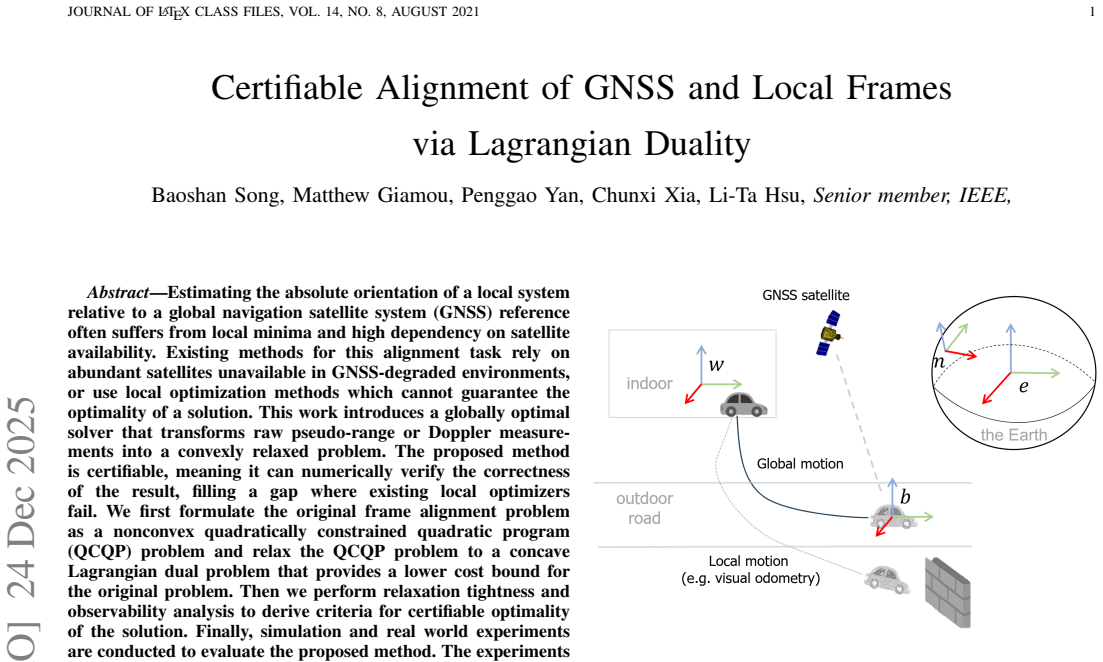
Estimating the absolute orientation of a local system relative to a global navigation satellite system (GNSS) reference often suffers from local minima and high dependency on satellite availability. Existing methods for this alignment task rely on abundant satellites unavailable in GNSS-degraded environments, or use local optimization methods which cannot guarantee the optimality of a solution. This work introduces a globally optimal solver that transforms raw pseudo-range or Doppler measurements into a convexly relaxed problem. The proposed method is certifiable, meaning it can numerically verify the correctness of the result, filling a gap where existing local optimizers fail. We first formulate the original frame alignment problem as a nonconvex quadratically constrained quadratic program (QCQP) problem and relax the QCQP problem to a concave Lagrangian dual problem that provides a lower cost bound for the original problem. Then we perform relaxation tightness and observability analysis to derive criteria for certifiable optimality of the solution. Finally, simulation and real world experiments are conducted to evaluate the proposed method. The experiments show that our method provides certifiably optimal solutions even with only 2 satellites with Doppler measurements and 2D vehicle motion, while the traditional velocity-based VOBA method and the advanced GVINS alignment technique may fail or converge to local optima without notice. To support the development of GNSS-based navigation techniques in robotics, all code and data are open-sourced at https://github.com/Baoshan-Song/Certifiable-Doppler-alignment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates GNSS-local frame alignment from pseudo-range or Doppler measurements as a nonconvex QCQP, relaxes it to a concave Lagrangian dual providing a lower bound, derives tightness and observability criteria to certify when the dual solution equals the primal optimum, and claims this yields certifiably global solutions even with only 2 satellites under 2D motion—unlike VOBA or GVINS which may converge to local optima. Simulation and real-world experiments are presented, with code and data open-sourced.
Significance. If the tightness criteria are sufficient, the work supplies a practical certifiable solver for GNSS-degraded robotics navigation, filling a gap left by local optimizers. The open-source release is a clear strength for reproducibility.
major comments (2)
- [relaxation tightness and observability analysis] The central claim of certifiable optimality with 2-satellite Doppler measurements in 2D motion rests on the relaxation-tightness and observability analysis. It is unclear whether the derived criteria are sufficient to guarantee dual-primal equality in all configurations (including degenerate geometries) or only generic ones; if the latter, a numerical certificate could be issued even when a lower-cost feasible point exists, undermining the guarantee. A concrete counter-example check or explicit proof covering degenerate cases is needed.
- [Experiments] Experiments claim support for the minimal-observation case, but without reported failure rates, error bars, or explicit verification that the dual bound is achieved and no better feasible point exists in the tested 2-satellite Doppler trials, it is difficult to rule out post-hoc selection or incomplete coverage of degenerate geometries.
minor comments (2)
- [Formulation] Clarify notation for the dual variables and the mapping from raw measurements to the QCQP matrices.
- [Observability analysis] Add a short table summarizing the minimal conditions (number of satellites, motion dimensionality, measurement type) under which tightness is proven.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and agree that targeted revisions will strengthen the presentation of the tightness guarantees and experimental validation.
read point-by-point responses
-
Referee: [relaxation tightness and observability analysis] The central claim of certifiable optimality with 2-satellite Doppler measurements in 2D motion rests on the relaxation-tightness and observability analysis. It is unclear whether the derived criteria are sufficient to guarantee dual-primal equality in all configurations (including degenerate geometries) or only generic ones; if the latter, a numerical certificate could be issued even when a lower-cost feasible point exists, undermining the guarantee. A concrete counter-example check or explicit proof covering degenerate cases is needed.
Authors: We appreciate the referee's emphasis on this point. The tightness criteria are obtained from an observability analysis that characterizes the conditions for dual-primal equality in the minimal 2-satellite Doppler case under 2D motion. While the derivation targets the configurations relevant to the claim, we acknowledge that an explicit treatment of degenerate geometries would remove any ambiguity. In the revision we will add a dedicated subsection with a proof outline covering degenerate cases together with numerical verification on synthetic instances that satisfy the observability conditions, confirming that the dual bound is attained and no lower-cost feasible point exists. revision: yes
-
Referee: [Experiments] Experiments claim support for the minimal-observation case, but without reported failure rates, error bars, or explicit verification that the dual bound is achieved and no better feasible point exists in the tested 2-satellite Doppler trials, it is difficult to rule out post-hoc selection or incomplete coverage of degenerate geometries.
Authors: We agree that additional statistical reporting and verification would improve transparency. The current experiments already compare against VOBA and GVINS on both simulated and real data, but we will revise the section to include failure rates over repeated trials, error bars on the reported metrics, and explicit checks that the dual solution equals the primal cost (or that a feasible point with lower cost does not exist) for the 2-satellite Doppler trials. We will also ensure the test geometries span both generic and near-degenerate configurations. revision: yes
Circularity Check
Derivation relies on standard QCQP relaxation and tightness analysis without reduction to inputs
full rationale
The paper formulates GNSS-local frame alignment as a nonconvex QCQP, relaxes it to a concave Lagrangian dual providing a lower bound, and derives tightness/observability criteria via analysis to certify optimality under minimal 2-satellite Doppler conditions. This chain uses established convex relaxation methods and direct mathematical derivation rather than self-definitional loops, fitted parameters renamed as predictions, or load-bearing self-citations. No equations reduce the claimed certifiable optimality to prior fitted quantities or ansatzes by construction; the criteria and experiments provide independent content, rendering the derivation self-contained.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Lagrangian duality provides a tight lower bound for the original QCQP when relaxation conditions are met
- domain assumption Observability analysis yields verifiable criteria for solution optimality
Reference graph
Works this paper leans on
-
[1]
P. D. Groves,Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. Boston, MA: Artech House, 2008. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 8 TABLE III ALIGNMENTERROR OF THREE COMPARED METHODS IN THE REAL TESTS. Yaw error [°] MAE/STD/MAX Ave. Sat. Num. VOBA GVINS SDP Berlin1 4 5.76 2.27 11.98 4.72 2.59 10.84 4.69 2....
work page 2008
-
[2]
M. He, C. Chen, J. Liu, C. Li, X. Lyu, G. Huang, and Z. Meng, “Aerialvl: A dataset, baseline and algorithm framework for aerial-based visual localization with reference map,”IEEE Robotics and Automation Letters, 2024
work page 2024
-
[3]
Localization requirements for autonomous vehicles,
T. G. R. Reid, S. E. Houts, R. Cammarata, G. Mills, S. Agarwal, A. V ora, and G. Pandey, “Localization requirements for autonomous vehicles,” arXiv preprint arXiv:1906.01061, 2019, available: https://arxiv.org/abs/ 1906.01061
-
[4]
Gici-lib: A gnss/ins/camera integrated navigation library,
C. Chi, X. Zhang, J. Liu, Y . Sun, Z. Zhang, and X. Zhan, “Gici-lib: A gnss/ins/camera integrated navigation library,”IEEE Robotics and Automation Letters, vol. 8, no. 12, pp. 7970–7977, 2023
work page 2023
-
[5]
Towards robust gnss positioning and real-time kinematic using factor graph optimization,
W. Wen and L.-T. Hsu, “Towards robust gnss positioning and real-time kinematic using factor graph optimization,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 5884–5890
work page 2021
-
[6]
A least squares estimate of satellite attitude,
G. Wahba, “A least squares estimate of satellite attitude,”SIAM Review, vol. 7, no. 3, pp. 409–409, 1965
work page 1965
-
[7]
Rapid initial heading alignment for mems land vehicular gnss/ins navigation system,
Q. Chen, H. Lin, J. Kuang, Y . Luo, and X. Niu, “Rapid initial heading alignment for mems land vehicular gnss/ins navigation system,”IEEE Sensors Journal, vol. 23, no. 7, pp. 7656–7666, 2023
work page 2023
-
[8]
Q. Zhang, S. Li, Z. Xu, and X. Niu, “Velocity-based optimization- based alignment (vboba) of low-end mems imu/gnss for low dynamic applications,”IEEE Sensors Journal, vol. 20, no. 10, pp. 5527–5539, 2020
work page 2020
-
[9]
Optimization-based alignment for inertial navigation systems: Theory and algorithm,
M. Wu, Y . Wu, X. Hu, and D. Hu, “Optimization-based alignment for inertial navigation systems: Theory and algorithm,”Aerospace Science and Technology, vol. 15, no. 1, pp. 1–17, 2011
work page 2011
-
[10]
Least-squares fitting of two 3-d point sets,
K. S. Arun, T. S. Huang, and S. D. Blostein, “Least-squares fitting of two 3-d point sets,”IEEE Transactions on Pattern Analysis and Machine Intelligence, pp. 698–700, 1987
work page 1987
-
[11]
Least-squares estimation of transformation parameters between two point patterns,
S. Umeyama, “Least-squares estimation of transformation parameters between two point patterns,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 13, no. 4, pp. 376–380, 2002
work page 2002
-
[12]
Carrier-phase-based initial heading alignment for land vehicular mems gnss/ins naviga- tion system,
T. Zhang, S. Liu, Q. Chen, X. Feng, and X. Niu, “Carrier-phase-based initial heading alignment for land vehicular mems gnss/ins naviga- tion system,”IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1–13, 2022
work page 2022
-
[13]
Y . Wei, H. Li, and M. Lu, “Carrier doppler-based initial alignment for mems imu/gnss integrated system under low satellite visibility,”GPS Solutions, vol. 25, no. 3, p. 90, 2021
work page 2021
-
[14]
Gvins: Tightly coupled gnss–visual–inertial fusion for smooth and consistent state estimation,
S. Cao, X. Lu, and S. Shen, “Gvins: Tightly coupled gnss–visual–inertial fusion for smooth and consistent state estimation,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2004–2021, 2022
work page 2004
-
[15]
P 3- lins: Tightly coupled ppp-gnss/ins/lidar navigation system with effective initialization,
T. Li, L. Pei, Y . Xiang, X. Zuo, W. Yu, and T.-K. Truong, “P 3- lins: Tightly coupled ppp-gnss/ins/lidar navigation system with effective initialization,”IEEE Transactions on Instrumentation and Measurement, vol. 72, pp. 1–13, 2023
work page 2023
-
[16]
On the tightness of semidefinite relaxations for rotation estimation,
L. Brynte, V . Larsson, J. P. Iglesias, C. Olsson, and F. Kahl, “On the tightness of semidefinite relaxations for rotation estimation,”Journal of Mathematical Imaging and Vision, vol. 64, no. 1, pp. 57–67, 2022
work page 2022
-
[17]
S. P. Boyd and L. Vandenberghe,Convex Optimization. Cambridge University Press, 2004
work page 2004
-
[18]
Se- sync: A certifiably correct algorithm for synchronization over the special euclidean group,
D. M. Rosen, L. Carlone, A. S. Bandeira, and J. J. Leonard, “Se- sync: A certifiably correct algorithm for synchronization over the special euclidean group,”The International Journal of Robotics Research, vol. 38, no. 2-3, pp. 95–125, 2019
work page 2019
-
[19]
Doppler frequency shift based source localization in presence of sensor location errors,
L. Deng, P. Wei, Z. Zhang, and H. Zhang, “Doppler frequency shift based source localization in presence of sensor location errors,”IEEE Access, vol. 6, pp. 59 752–59 760, 2018
work page 2018
-
[20]
Teaser: Fast and certifiable point cloud registration,
H. Yang, J. Shi, and L. Carlone, “Teaser: Fast and certifiable point cloud registration,”IEEE Transactions on Robotics, vol. 37, no. 2, pp. 314– 333, 2020
work page 2020
-
[21]
Certifiably globally optimal extrinsic calibration from per-sensor egomotion,
M. Giamou, Z. Ma, V . Peretroukhin, and J. Kelly, “Certifiably globally optimal extrinsic calibration from per-sensor egomotion,”IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 367–374, 2019
work page 2019
-
[22]
Resync: Riemannian subgradient-based robust rotation synchronization,
H. Liu, X. Li, and A. M.-C. So, “Resync: Riemannian subgradient-based robust rotation synchronization,” inAdvances in Neural Information Processing Systems, vol. 36, 2023, pp. 5236–5261
work page 2023
-
[23]
Y . Yan, G. Yang, H. Wang, and X. Shen, “Robust multiple sensor localization via semidefinite relaxation in wireless sensor networks with anchor position uncertainty,”Measurement, vol. 196, p. 111193, 2022
work page 2022
-
[24]
Oasis: Optimal ar- rangements for sensing in slam,
P. Kaveti, M. Giamou, H. Singh, and D. M. Rosen, “Oasis: Optimal ar- rangements for sensing in slam,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 13 818–13 824
work page 2024
-
[25]
B. Song, W. Wen, and L.-T. Hsu, “Certifiably optimal satellite orbit determination based on doppler measurements for low-earth-orbit satel- lites,” in2025 IEEE/ION Position, Location and Navigation Symposium (PLANS), 2025, pp. 410–416
work page 2025
-
[26]
Certifiably optimal doppler positioning using opportunistic leo satellites,
B. Song, W. Wen, Q. Zhang, B. Xu, and L.-T. Hsu, “Certifiably optimal doppler positioning using opportunistic leo satellites,”arXiv preprint arXiv:2509.17198, 2025
-
[27]
On-manifold preintegration for real-time visual–inertial odometry,
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-manifold preintegration for real-time visual–inertial odometry,”IEEE Transactions on Robotics, vol. 33, no. 1, pp. 1–21, 2016
work page 2016
-
[28]
Z. Shen, X. Li, and X. Li, “Advancing high-precision navigation: Lever- aging homogeneous sensors in tightly coupled ppp-rtk/imu integration,” IEEE Transactions on Industrial Electronics, vol. 71, no. 11, pp. 15 100– 15 110, 2024
work page 2024
-
[29]
X. Li, Z. Qin, Z. Shen, X. Li, Y . Zhou, and B. Song, “A high-precision vehicle navigation system based on tightly coupled ppp-rtk/ins/odometer integration,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 2, pp. 1855–1866, 2022
work page 2022
-
[30]
Instantaneous velocity determination and positioning using doppler shift from a leo constellation,
F. Guo, Y . Yang, F. Ma, Y . Zhu, H. Liu, and X. Zhang, “Instantaneous velocity determination and positioning using doppler shift from a leo constellation,”Satellite Navigation, vol. 4, no. 1, p. 9, 2023
work page 2023
-
[31]
Convex global 3d registration with lagrangian duality,
J. Briales and J. Gonzalez-Jimenez, “Convex global 3d registration with lagrangian duality,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017, pp. 4960–4969
work page 2017
-
[32]
On the local stability of semidefinite relaxations,
D. Cifuentes, S. Agarwal, P. A. Parrilo, and R. R. Thomas, “On the local stability of semidefinite relaxations,”Mathematical Programming, vol. 193, no. 2, pp. 629–663, 2022
work page 2022
-
[33]
Toward globally optimal state estimation using automatically tightened semidefinite re- laxations,
F. D ¨umbgen, C. Holmes, B. Agro, and T. Barfoot, “Toward globally optimal state estimation using automatically tightened semidefinite re- laxations,”IEEE Transactions on Robotics, vol. 40, pp. 4338–4358, 2024
work page 2024
-
[34]
Observability- aware intrinsic and extrinsic calibration of lidar-imu systems,
J. Lv, X. Zuo, K. Hu, J. Xu, G. Huang, and Y . Liu, “Observability- aware intrinsic and extrinsic calibration of lidar-imu systems,”IEEE Transactions on Robotics, vol. 38, no. 6, pp. 3734–3753, 2022
work page 2022
-
[35]
P. Reisdorf, T. Pfeifer, J. Breßler, S. Bauer, P. Weissig, S. Lange, G. Wanielik, and P. Protzel, “The problem of comparable gnss results–an approach for a uniform dataset with low-cost and reference data,” in Proceedings of the International Conference on Advances in V ehicular Systems, Technologies and Applications (VEHICULAR), 2016
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.