Energy-Gain Control of Time-Varying Systems: Receding Horizon Approximation
Pith reviewed 2026-05-22 12:17 UTC · model grok-4.3
The pith
For linear time-varying systems, a finite number of receding-horizon preview steps keeps the infinite-horizon energy-gain performance loss below any chosen tolerance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The main approximation result is a sufficient number of preview steps for the incurred performance loss to remain below any set tolerance, relative to the baseline gain bound of the associated infinite-preview controller. The synthesis of such controllers leverages the strict contraction of lifted Riccati operators under uniform controllability and observability.
What carries the argument
Strict contraction of lifted Riccati operators under uniform controllability and observability, used to bound the performance gap between finite-preview and infinite-preview controllers.
If this is right
- Finite-preview controllers can be synthesized without access to the full future model sequence.
- The minimal preview length needed to meet any tolerance can be computed from the contraction rate.
- The result holds for discrete-time linear time-varying systems under the stated assumptions.
- Near-optimal energy-gain performance is achievable with only local model information.
Where Pith is reading between the lines
- Real-time implementations could become feasible when far-future model data is expensive or uncertain to obtain.
- The same contraction idea might yield approximation bounds for other infinite-horizon criteria if analogous operator properties hold.
- Numerical checks of the uniform controllability and observability conditions could serve as a practical test for when the finite-preview guarantee applies.
- Links to receding-horizon model predictive control suggest possible cross-fertilization for time-varying plants.
Load-bearing premise
The lifted Riccati operators contract strictly when the time-varying system is uniformly controllable and observable.
What would settle it
A concrete linear time-varying system that meets uniform controllability and observability yet shows performance loss that does not fall below a given tolerance no matter how many preview steps are added.
Figures
read the original abstract
Standard formulations of prescribed worst-case disturbance energy-gain control policies for linear time-varying systems depend on all forward model data. In discrete time, this dependence arises through a backward Riccati recursion. This article is about the infinite-horizon $\ell_2$ gain performance of state feedback policies with only finite receding-horizon preview of the model parameters. The proposed synthesis of controllers subject to such a constraint leverages the strict contraction of lifted Riccati operators under uniform controllability and observability. The main approximation result is a sufficient number of preview steps for the incurred performance loss to remain below any set tolerance, relative to the baseline gain bound of the associated infinite-preview controller. Aspects of the result are explored in a numerical example.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a receding-horizon approximation for infinite-horizon ℓ₂-gain (energy-gain) state-feedback control of discrete-time linear time-varying systems. It claims that, under uniform controllability and observability, the lifted Riccati operators are strictly contractive, which implies that a finite preview length N exists such that the performance loss relative to the infinite-preview controller remains below any prescribed tolerance. The result is illustrated via a numerical example.
Significance. If the uniformity of the contraction rate holds and the error bounds are made explicit, the work supplies a practical, theoretically justified route to approximate infinite-horizon energy-gain controllers with finite model preview. This is potentially useful for time-varying systems where full future parameter trajectories are unavailable. The contraction-mapping approach on lifted spaces is a methodological strength that could generalize to other receding-horizon problems.
major comments (2)
- [Main approximation result] § on the main approximation theorem (likely around the statement of the sufficient preview length N): The argument invokes uniform controllability and observability to obtain a strict contraction factor ρ < 1 for the lifted Riccati map. However, these conditions bound the Gramians but do not automatically guarantee that inf_t (1 − ρ(t)) > 0. If the local contraction rate can approach 1 at arbitrarily late times, no single finite N can ensure the infinite-horizon ℓ₂-gain loss stays below a fixed tolerance uniformly. Please supply the explicit lemma or estimate establishing time-uniformity of ρ.
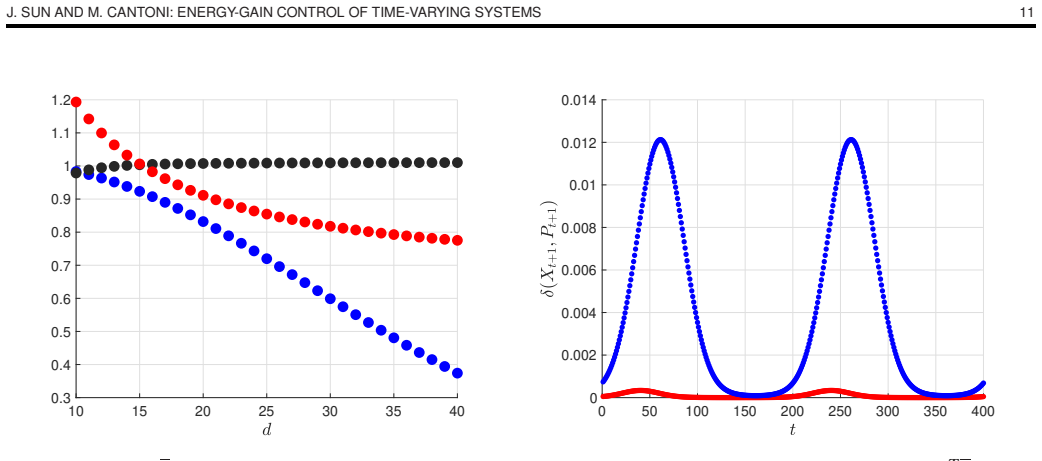
- [Numerical example] Numerical example section: The reported simulation should include explicit computation of the infinite-preview gain bound, the finite-preview approximation error for the chosen N, and verification that the observed loss lies below the claimed tolerance. Without these numbers the example does not confirm the quantitative claim.
minor comments (2)
- [Preliminaries / lifted operators] Define the precise Banach space and norm in which the lifted operators act and in which the contraction is measured.
- [Introduction] Add a short remark comparing the obtained preview length N with existing receding-horizon bounds in the LTV literature.
Simulated Author's Rebuttal
We thank the referee for the constructive review and positive assessment of the paper's potential. We address each major comment below and will revise the manuscript to incorporate the suggested clarifications and additions.
read point-by-point responses
-
Referee: [Main approximation result] § on the main approximation theorem (likely around the statement of the sufficient preview length N): The argument invokes uniform controllability and observability to obtain a strict contraction factor ρ < 1 for the lifted Riccati map. However, these conditions bound the Gramians but do not automatically guarantee that inf_t (1 − ρ(t)) > 0. If the local contraction rate can approach 1 at arbitrarily late times, no single finite N can ensure the infinite-horizon ℓ₂-gain loss stays below a fixed tolerance uniformly. Please supply the explicit lemma or estimate establishing time-uniformity of ρ.
Authors: We appreciate the referee's careful scrutiny of the uniformity argument. The uniform controllability and observability assumptions yield time-independent lower and upper bounds on the controllability and observability Gramians. These uniform Gramian bounds propagate through the lifted Riccati recursion to produce a uniform contraction factor satisfying ρ(t) ≤ ρ_max < 1 for all t, with the gap 1 − ρ_max bounded away from zero by a positive constant that depends only on the controllability/observability constants. To render this step fully explicit, we will add a dedicated lemma (new Lemma 3.4) in Section 3 that derives the uniform contraction rate directly from the Gramian bounds via a compactness argument on the lifted operator space. This lemma will also supply a concrete expression for the minimal preview length N in terms of the contraction gap and the desired tolerance. revision: yes
-
Referee: [Numerical example] Numerical example section: The reported simulation should include explicit computation of the infinite-preview gain bound, the finite-preview approximation error for the chosen N, and verification that the observed loss lies below the claimed tolerance. Without these numbers the example does not confirm the quantitative claim.
Authors: We agree that the numerical example would be strengthened by explicit quantitative verification. In the revised manuscript we will augment the numerical example with (i) the computed infinite-preview ℓ₂-gain bound, (ii) the finite-preview approximation error for the selected N, and (iii) a direct numerical check confirming that the observed performance loss remains below the prescribed tolerance. These additions will be presented in a new table and accompanying text to make the validation of the main approximation result transparent. revision: yes
Circularity Check
Derivation is self-contained via contraction of lifted Riccati operators under uniform controllability/observability.
full rationale
The paper establishes the main approximation result by invoking the strict contraction property of the lifted Riccati operators, which follows directly from the uniform controllability and observability assumptions via standard operator-theoretic arguments. No step reduces by construction to a fitted parameter, self-definition, or load-bearing self-citation whose validity is presupposed by the present work. The finite-preview bound is obtained as a consequence of the contraction mapping on the lifted space, without renaming known results or smuggling ansatzes. The derivation chain remains independent of the target performance claim and is therefore non-circular.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Uniform controllability and observability of the time-varying system
Reference graph
Works this paper leans on
-
[1]
Contributions to the theory of optimal control,
R. E. Kalman et al. , “Contributions to the theory of optimal control,” Bol. Soc. Mat. Mexicana , vol. 5, no. 2, pp. 102–119, 1960
work page 1960
-
[2]
M. Athans and P . L. Falb, Optimal Control: An Introduction to the Theory and Its Applications . McGraw-Hill, 1966
work page 1966
-
[3]
H. Kwakernaak and R. Sivan, Linear Optimal Control Systems , vol. 1. Wiley-Interscience, New Y ork, 1972
work page 1972
- [4]
-
[5]
B. Hassibi, A. H. Sayed, and T. Kailath, Indefinite-Quadratic Estimation and Control: A Unified Approach to H2 and H∞ Theories. Studies in Applied and Numerical Mathematics, SIAM, 1999
work page 1999
-
[6]
W. W. Hager and L. L. Horowitz, “Convergence and stability pr operties of the discrete Riccati operator equation and the associate d optimal con- trol and filtering problems,” SIAM Journal on Control and Optimization , vol. 14, no. 2, pp. 295–312, 1976
work page 1976
-
[7]
Detectability and stabiliza bility of time-varying discrete-time linear systems,
B. D. Anderson and J. B. Moore, “Detectability and stabiliza bility of time-varying discrete-time linear systems,” SIAM Journal on Control and Optimization , vol. 19, no. 1, pp. 20–32, 1981. J. SUN AND M. CANTONI: ENERGY -GAIN CONTROL OF TIME-VARYING S YSTEMS 13
work page 1981
-
[8]
Riccati difference and differe ntial equations: Convergence, monotonicity and stability,
R. R. Bitmead and M. Gevers, “Riccati difference and differe ntial equations: Convergence, monotonicity and stability,” in The Riccati Equation, pp. 263–291, Springer, 1991
work page 1991
-
[9]
H∞ -control with state feedback for time-varying discrete systems,
H. Katayama and A. Ichikawa, “ H∞ -control with state feedback for time-varying discrete systems,” International Journal of Control, vol. 60, no. 3, pp. 451–465, 1994
work page 1994
-
[10]
On the discrete time matrix Ricc ati equation of optimal control,
P . E. Caines and D. Q. Mayne, “On the discrete time matrix Ricc ati equation of optimal control,” International Journal of Control , vol. 12, no. 5, pp. 785–794, 1970
work page 1970
-
[11]
Least squares stationary optimal control an d the al- gebraic Riccati equation,
J. C. Willems, “Least squares stationary optimal control an d the al- gebraic Riccati equation,” IEEE Transactions on Automatic Control , vol. 16, no. 6, pp. 621–634, 1971
work page 1971
-
[12]
Numerical solution of the discrete-ti me periodic Riccati equation,
J. Hench and A. Laub, “Numerical solution of the discrete-ti me periodic Riccati equation,” IEEE Transactions on Automatic Control , vol. 39, no. 6, pp. 1197–1210, 1994
work page 1994
-
[13]
S. Bittanti and P . Colaneri, Periodic Systems: Filtering and Control . Springer Science & Business Media, 2009
work page 2009
-
[14]
A. Halanay and V . Ionescu, Time-V arying Discrete Linear Systems: Input-Output Operators, Riccati Equations, Disturbance A ttenuation. Operator Theory: Advances and Applications, Birkh¨ auser B asel, 1994
work page 1994
-
[15]
M. Peters and P . Iglesias, Minimum Entropy Control for Time-V arying Systems. Systems & Control: Foundations & Applications, Birkh¨ aus er Boston, 1997
work page 1997
-
[16]
A new approach for analysis and sy nthesis of time-varying systems,
G. E. Dullerud and S. Lall, “A new approach for analysis and sy nthesis of time-varying systems,” IEEE Transactions on Automatic Control , vol. 44, no. 8, pp. 1486–1497, 1999
work page 1999
-
[17]
Control of linear s witched systems with receding horizon modal information,
R. Essick, J.-W. Lee, and G. E. Dullerud, “Control of linear s witched systems with receding horizon modal information,” IEEE Transactions on Automatic Control , vol. 59, no. 9, pp. 2340–2352, 2014
work page 2014
-
[18]
On receding-horizon approximation i n time- varying optimal control,
J. Sun and M. Cantoni, “On receding-horizon approximation i n time- varying optimal control,” in 62nd IEEE Conference on Decision and Control (CDC), pp. 7265–7270, 2023
work page 2023
-
[19]
Sun, Finite Preview Approximation of Feedback Control Policies for Time-Varying Systems
J. Sun, Finite Preview Approximation of Feedback Control Policies for Time-Varying Systems . PhD thesis, University of Melbourne, 2024
work page 2024
-
[20]
Kalman filtering with random coefficients and c ontrac- tions,
P . Bougerol, “Kalman filtering with random coefficients and c ontrac- tions,” SIAM Journal on Control and Optimization , vol. 31, no. 4, pp. 942–959, 1993
work page 1993
-
[21]
Coping with singular transitio n matrices in estimation and control stability theory,
J. Moore and B. D. Anderson, “Coping with singular transitio n matrices in estimation and control stability theory,” International Journal of Control, vol. 31, no. 3, pp. 571–586, 1980
work page 1980
-
[22]
Lall, Robust Control Synthesis in the Time Domain
S. Lall, Robust Control Synthesis in the Time Domain . PhD thesis, University of Cambridge, 1995
work page 1995
-
[23]
Regret-optimal control in dynamic e nviron- ments,
G. Goel and B. Hassibi, “Regret-optimal control in dynamic e nviron- ments,” Proceedings of Machine Learning Research vol , vol. 134, pp. 1– 22, 2021
work page 2021
-
[24]
Regret-optimal estimation and cont rol,
G. Goel and B. Hassibi, “Regret-optimal estimation and cont rol,” IEEE Transactions on Automatic Control, vol. 68, no. 5, pp. 3041–3053, 2023
work page 2023
-
[25]
Two-player dynamic po- tential LQ games with sequentially revealed costs,
Y . Chen, T. L. Molloy, and I. Shames, “Two-player dynamic po- tential LQ games with sequentially revealed costs,” arXiv preprint arXiv:2503.20234, 2025
-
[26]
On feedback stabilization of time-v arying discrete linear systems,
W. Kwon and A. Pearson, “On feedback stabilization of time-v arying discrete linear systems,” IEEE Transactions on Automatic Control , vol. 23, no. 3, pp. 479–481, 1978
work page 1978
-
[27]
S. S. Keerthi and E. G. Gilbert, “Optimal infinite-horizon fe edback laws for a general class of constrained discrete-time systems: S tability and moving-horizon approximations,” Journal of Optimization Theory and Applications, vol. 57, pp. 265–293, 1988
work page 1988
-
[28]
J. B. Rawlings, D. Q. Mayne, and M. Diehl, Model Predictive Control: Theory, Computation, and Design . Nob Hill Publishing Madison, 2017
work page 2017
-
[29]
On the stability of receding hor izon control with a general terminal cost,
A. Jadbabaie and J. Hauser, “On the stability of receding hor izon control with a general terminal cost,” IEEE Transactions on Automatic Control , vol. 50, no. 5, pp. 674–678, 2005
work page 2005
-
[30]
On the infinite horizon performanc e of receding horizon controllers,
L. Gr¨ une and A. Rantzer, “On the infinite horizon performanc e of receding horizon controllers,” IEEE Transactions on Automatic Control , vol. 53, no. 9, pp. 2100–2111, 2008
work page 2008
-
[31]
Control of const rained discrete-time systems with bounded ℓ2 gain,
P . J. Goulart, E. C. Kerrigan, and T. Alamo, “Control of const rained discrete-time systems with bounded ℓ2 gain,” IEEE Transactions on Automatic Control, vol. 54, no. 5, pp. 1105–1111, 2009
work page 2009
-
[32]
Optimi zation over state feedback policies for robust control with constraint s,
P . J. Goulart, E. C. Kerrigan, and J. M. Maciejowski, “Optimi zation over state feedback policies for robust control with constraint s,” Automatica, vol. 42, no. 4, pp. 523–533, 2006
work page 2006
-
[33]
A. Karapetyan, A. Iannelli, and J. Lygeros, “On the regret of H∞ control,” in Proceedings of the 61st IEEE Conference on Decision and Control (CDC), pp. 6181–6186, IEEE, 2022
work page 2022
-
[34]
On the guarantees of minimizing regret in receding horizon ,
A. Martin, L. Furieri, F. D¨ orfler, J. Lygeros, and G. Ferrari -Trecate, “On the guarantees of minimizing regret in receding horizon ,” IEEE Transactions on Automatic Control, vol. 70, no. 3, pp. 1547–1562, 2025
work page 2025
-
[35]
A contraction analysis of the conver gence of risk-sensitive filters,
B. C. Levy and M. Zorzi, “A contraction analysis of the conver gence of risk-sensitive filters,” SIAM Journal on Control and Optimization , vol. 54, no. 4, pp. 2154–2173, 2016
work page 2016
-
[36]
Bhatia, Positive Definite Matrices
R. Bhatia, Positive Definite Matrices . Princeton University Press, 2007
work page 2007
-
[37]
P . Lancaster and L. Rodman, Algebraic Riccati Equations . Clarendon press, 1995
work page 1995
-
[38]
R. A. Horn and C. R. Johnson, Topics in Matrix Analysis . Cambridge University Press, 1991. Jintao Sun received the Master of Engineering (electrical) degree fro m the University of Melbourne, Parkville, Victoria, Austral ia, in 2020. He completed a PhD degree in 2024, also with the Department of El ectrical and Electronic Engineering at the University of...
work page 1991
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.