HG-Lane: High-Fidelity Generation of Lane Scenes under Adverse Weather and Lighting Conditions without Re-annotation
Pith reviewed 2026-05-15 12:57 UTC · model grok-4.3
The pith
HG-Lane generates photorealistic lane scenes in adverse weather and lighting without re-annotation, enabling better training of detection models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
HG-Lane is a high-fidelity generation framework that produces lane scenes under adverse weather and lighting conditions while preserving accurate lane geometry from source images, eliminating the need for re-annotation. When used to augment training data, this leads to substantial improvements in lane detection performance across multiple categories on a new benchmark containing 30,000 images.
What carries the argument
The HG-Lane high-fidelity generation framework that synthesizes adverse-condition images while keeping original lane annotations intact.
Load-bearing premise
The synthetic images must accurately mimic real adverse weather effects on lane visibility while exactly preserving the lane positions and shapes from the original annotations.
What would settle it
Measuring lane detection performance on a separate collection of real-world images captured in rain, snow, or fog; if accuracy does not improve over models trained only on standard datasets, the value of the generated data is refuted.
Figures





read the original abstract
Lane detection is a crucial task in autonomous driving, as it helps ensure the safe operation of vehicles. However, existing datasets such as CULane and TuSimple contain relatively limited data under extreme weather conditions, including rain, snow, and fog. As a result, detection models trained on these datasets often become unreliable in such environments, which may lead to serious safety-critical failures on the road. To address this issue, we propose HG-Lane, a High-fidelity Generation framework for Lane Scenes under adverse weather and lighting conditions without requiring re-annotation. Based on this framework, we further construct a benchmark that includes adverse weather and lighting scenarios, containing 30,000 images. Experimental results demonstrate that our method consistently and significantly improves the performance of existing lane detection networks. For example, using the state-of-the-art CLRNet, the overall mF1 score on our benchmark increases by 20.87 percent. The F1@50 score for the overall, normal, snow, rain, fog, night, and dusk categories increases by 19.75 percent, 8.63 percent, 38.8 percent, 14.96 percent, 26.84 percent, 21.5 percent, and 12.04 percent, respectively. The code and dataset are available at: https://github.com/zdc233/HG-Lane.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes HG-Lane, a high-fidelity generation framework for lane scenes under adverse weather and lighting conditions that preserves original annotations without re-labeling. It constructs a 30,000-image synthetic benchmark covering snow, rain, fog, night, and dusk scenarios, and reports that augmenting training data with these images yields consistent gains for lane detectors (e.g., +20.87% overall mF1 for CLRNet, with per-category F1@50 lifts ranging from 8.63% to 38.8%). Code and dataset are released.
Significance. If the generated images prove photorealistic and geometrically faithful, the approach offers a practical route to data augmentation for safety-critical lane detection without costly re-annotation, directly targeting the scarcity of adverse-condition data in CULane and TuSimple. Releasing the benchmark and code strengthens reproducibility and enables follow-on work.
major comments (2)
- [Experimental results / abstract] The headline performance claims (e.g., +20.87% mF1 for CLRNet) are measured exclusively on the authors' 30k-image synthetic benchmark generated by HG-Lane itself. No cross-domain experiments are reported that train on HG-Lane-augmented data and evaluate on held-out real adverse-weather splits from CULane or TuSimple, leaving the domain-gap assumption untested.
- [Abstract and §4] The abstract and results sections provide no quantitative validation of photorealism (e.g., FID scores against real adverse captures, perceptual studies, or geometry-preservation metrics such as lane-marking alignment error) beyond the downstream detector gains on synthetic data.
minor comments (1)
- [Method] Clarify in the method section how the weather/lighting control parameters are sampled to ensure diversity without introducing annotation drift.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below, clarifying our evaluation choices while committing to revisions that strengthen the evidence for photorealism and cross-domain utility.
read point-by-point responses
-
Referee: [Experimental results / abstract] The headline performance claims (e.g., +20.87% mF1 for CLRNet) are measured exclusively on the authors' 30k-image synthetic benchmark generated by HG-Lane itself. No cross-domain experiments are reported that train on HG-Lane-augmented data and evaluate on held-out real adverse-weather splits from CULane or TuSimple, leaving the domain-gap assumption untested.
Authors: Our primary results focus on the HG-Lane benchmark because it provides a controlled, large-scale testbed for adverse conditions where real annotated data remains scarce; the consistent per-category gains (e.g., +38.8% F1@50 on snow) directly demonstrate the value of the generated data for the target task. We acknowledge that explicit cross-domain transfer results would further support generalization. In the revised manuscript we will add experiments that augment the original CULane training set with HG-Lane images and evaluate on the held-out real adverse-weather subsets of both CULane and TuSimple. revision: yes
-
Referee: [Abstract and §4] The abstract and results sections provide no quantitative validation of photorealism (e.g., FID scores against real adverse captures, perceptual studies, or geometry-preservation metrics such as lane-marking alignment error) beyond the downstream detector gains on synthetic data.
Authors: Downstream lane-detection gains serve as a task-specific proxy for image utility, especially given that lane annotations are exactly preserved. Nevertheless, we agree that direct metrics would increase confidence in photorealism and geometric fidelity. In the revision we will report FID scores between HG-Lane images and real adverse-weather captures from CULane, include a small-scale human perceptual study, and add a lane-marking alignment error metric computed on the preserved ground-truth labels. revision: yes
Circularity Check
No circularity; empirical gains measured on independently generated benchmark
full rationale
The paper presents an algorithmic generation framework (HG-Lane) that produces synthetic adverse-weather lane images while preserving original annotations, then reports standard mF1/F1 improvements when detectors are trained on mixes including these images and evaluated on the 30k-image benchmark. No equations, uniqueness theorems, or self-citations are invoked to derive the performance numbers; the gains are obtained by direct training and testing on held-out generated data using off-the-shelf metrics. This is a standard empirical pipeline with no reduction of claimed results to inputs by construction. The photorealism assumption for real-world transfer is an external validity concern, not a circularity in the derivation chain.
Axiom & Free-Parameter Ledger
free parameters (1)
- weather and lighting control parameters
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
HG-Lane is a dual-stage, control-guided diffusion framework that generates lane images with diverse weather conditions and illumination conditions while preserving lane geometry... C0 = (A ⊙ M) ⊕ E
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose HG-Lane, a High-fidelity Generation framework for Lane Scenes under adverse weather and lighting conditions without requiring re-annotation... 30,000 images... +20.87% mF1 on CLRNet
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Hala Abualsaud, Sean Liu, David Lu, Kenny Situ, Akshay Rangesh, and Mohan M. Trivedi. Laneaf: Robust multi-lane detection with affinity fields.IEEE Robotics Autom. Lett., 6 (4):7477–7484, 2021. 6
work page 2021
-
[2]
Unsupervised labeled lane markers using maps
Karsten Behrendt and Ryan Soussan. Unsupervised labeled lane markers using maps. InProceedings of the IEEE Inter- national Conference on Computer Vision, 2019. 1
work page 2019
-
[3]
Dana Berman, Tali Treibitz, and Shai Avidan. Non-local im- age dehazing. In2016 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016, Las Vegas, NV , USA, June 27-30, 2016, pages 1674–1682, 2016. 8
work page 2016
-
[4]
Wei-Ting Chen, Hao-Yu Fang, Cheng-Lin Hsieh, Cheng-Che Tsai, I-Hsiang Chen, Jian-Jiun Ding, and Sy-Yen Kuo. ALL snow removed: Single image desnowing algorithm using hi- erarchical dual-tree complex wavelet representation and con- tradict channel loss. In2021 IEEE/CVF International Con- ference on Computer Vision, ICCV 2021, Montreal, QC, Canada, October 1...
work page 2021
-
[5]
Bidirectional multi-scale implicit neural representations for image derain- ing
Xiang Chen, Jinshan Pan, and Jiangxin Dong. Bidirectional multi-scale implicit neural representations for image derain- ing. InIEEE/CVF Conference on Computer Vision and Pat- tern Recognition, CVPR 2024, Seattle, WA, USA, June 16-22, 2024, pages 25627–25636. IEEE, 2024. 8
work page 2024
-
[6]
Comfyui: The most powerful and mod- ular stable diffusion gui with a graph/nodes interface
ComfyAnonymous. Comfyui: The most powerful and mod- ular stable diffusion gui with a graph/nodes interface. https: //github.com/Comfy-Org/ComfyUI, 2023. 2
work page 2023
-
[7]
Diffu- sion models beat gans on image synthesis
Prafulla Dhariwal and Alexander Quinn Nichol. Diffu- sion models beat gans on image synthesis. InAdvances in Neural Information Processing Systems 34: Annual Con- ference on Neural Information Processing Systems 2021, NeurIPS 2021, December 6-14, 2021, virtual, pages 8780– 8794, 2021. 2
work page 2021
-
[8]
Prompt tuning inversion for text-driven image editing using diffusion models
Wei Dong, Shijie Xue, Xintong Duan, and Shuai Han. Prompt tuning inversion for text-driven image editing using diffusion models. InProceedings of the IEEE/CVF Interna- tional Conference on Computer Vision (ICCV), 2023. 2
work page 2023
-
[9]
Ian Goodfellow, Jean Pouget-Abadie, Mehdi Mirza, Bing Xu, David Warde-Farley, Sherjil Ozair, Aaron Courville, and Yoshua Bengio. Generative adversarial nets. InAdvances in neural information processing systems, 2014. 2
work page 2014
-
[10]
Qing Guo, Jingyang Sun, Felix Juefei-Xu, Lei Ma, Xi- aofei Xie, Wei Feng, Yang Liu, and Jianjun Zhao. Effi- cientderain: Learning pixel-wise dilation filtering for high- efficiency single-image deraining. InThirty-Fifth AAAI Con- ference on Artificial Intelligence, AAAI 2021, Thirty-Third Conference on Innovative Applications of Artificial Intel- ligence,...
work page 2021
-
[11]
Plug-and-play diffusion features for text-driven image-to-image translation
Alon Hertz, Roy Molady, Josh Tenenbaum, Kfir Aberman, Yael Pritch, and Daniel Cohen-Or. Plug-and-play diffusion features for text-driven image-to-image translation. InPro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023. 2
work page 2023
-
[12]
Classifier-Free Diffusion Guidance
Jonathan Ho and Tim Salimans. Classifier-free diffusion guidance.arXiv preprint arXiv:2207.12598, 2022. 2
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[13]
Denoising dif- fusion probabilistic models
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising dif- fusion probabilistic models. InAdvances in Neural Informa- tion Processing Systems, pages 6840–6851, 2020. 2
work page 2020
-
[14]
Clrernet: Improving con- fidence of lane detection with laneiou
Hiroto Honda and Yusuke Uchida. Clrernet: Improving con- fidence of lane detection with laneiou. InIEEE/CVF Win- ter Conference on Applications of Computer Vision, WACV 2024, Waikoloa, HI, USA, January 3-8, 2024, pages 1165–
work page 2024
-
[15]
Learning lightweight lane detection cnns by self atten- tion distillation
Yuenan Hou, Zheng Ma, Chunxiao Liu, and Chen Change Loy. Learning lightweight lane detection cnns by self atten- tion distillation. In2019 IEEE/CVF International Confer- ence on Computer Vision, ICCV 2019, Seoul, Korea (South), October 27 - November 2, 2019, pages 1013–1021, 2019. 6
work page 2019
-
[16]
Clr- net: Cross layer refinement network for lane detection
Yuhang Hu, Zihao Zhang, Yaxing Wang, Sheng Liu, Jingbo Wang, Fei Wang, Xue Liu, and Shengjin Wang. Clr- net: Cross layer refinement network for lane detection. InIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 10229–10238, 2022. 1, 2, 6
work page 2022
-
[17]
Diederik P. Kingma and Max Welling. Auto-encoding vari- ational bayes. In2nd International Conference on Learning Representations, ICLR 2014, Banff, AB, Canada, April 14- 16, 2014, Conference Track Proceedings, 2014. 2
work page 2014
-
[18]
Cond- lanenet: a top-to-down lane detection framework based on conditional convolution
Lizhe Liu, Xiaohao Chen, Siyu Zhu, and Ping Tan. Cond- lanenet: a top-to-down lane detection framework based on conditional convolution. In2021 IEEE/CVF International Conference on Computer Vision, ICCV 2021, Montreal, QC, Canada, October 10-17, 2021, pages 3753–3762, 2021. 2, 6
work page 2021
-
[19]
R. Liu, Z. Yuan, T. Liu, and Z. Xiong. End-to-end lane shape prediction with transformers. InProceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), pages 3693–3701, 2021. 2, 6
work page 2021
-
[20]
Desnownet: Context-aware deep network for snow removal.IEEE Trans
Yun-Fu Liu, Da-Wei Jaw, Shih-Chia Huang, and Jenq-Neng Hwang. Desnownet: Context-aware deep network for snow removal.IEEE Trans. Image Process., 27(6):3064–3073,
-
[21]
Improved denoising diffusion probabilistic models
Alexander Quinn Nichol and Prafulla Dhariwal. Improved denoising diffusion probabilistic models. InProceedings of the 38th International Conference on Machine Learning, ICML 2021, 18-24 July 2021, Virtual Event, pages 8162–
work page 2021
-
[22]
GLIDE: towards photorealis- tic image generation and editing with text-guided diffusion models
Alexander Quinn Nichol, Prafulla Dhariwal, Aditya Ramesh, Pranav Shyam, Pamela Mishkin, Bob McGrew, Ilya Sutskever, and Mark Chen. GLIDE: towards photorealis- tic image generation and editing with text-guided diffusion models. InInternational Conference on Machine Learning, ICML 2022, 17-23 July 2022, Baltimore, Maryland, USA, pages 16784–16804. PMLR, 2022. 2
work page 2022
-
[23]
Spatial as deep: Spatial cnn for traffic scene understanding
Xingang Pan, Jianping Shi, Ping Luo, Xiaogang Wang, and Xiaoou Tang. Spatial as deep: Spatial cnn for traffic scene understanding. InAAAI Conference on Artificial Intelligence (AAAI), 2018. 1, 2, 6
work page 2018
-
[24]
Patil, Sunil Gupta, Santu Rana, Svetha Venkatesh, and Subrahmanyam Murala
Prashant W. Patil, Sunil Gupta, Santu Rana, Svetha Venkatesh, and Subrahmanyam Murala. Multi-weather im- age restoration via domain translation. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 21696–21705, 2023. 1
work page 2023
-
[25]
Lane detection and classification using cas- caded cnns
Fabio Pizzati, Marco Allodi, Alejandro Barrera, and Fer- nando Garc´ıa. Lane detection and classification using cas- caded cnns. InComputer Aided Systems Theory - EURO- CAST 2019 - 17th International Conference, Las Palmas de Gran Canaria, Spain, February 17-22, 2019, Revised Se- lected Papers, Part II, pages 95–103, 2019. 1
work page 2019
-
[26]
Clrkdnet: Speeding up lane detection with knowledge distillation
Weiqing Qi et al. Clrkdnet: Speeding up lane detection with knowledge distillation. InIEEE Intelligent Transportation Systems Conference (ITSC), 2024. 6
work page 2024
-
[27]
Chenghao Qian, Yuhu Guo, Yuhong Mo, and Wenjing Li. Weatherdg: Llm-assisted procedural weather generation for domain-generalized semantic segmentation.IEEE Robotics Autom. Lett., 10(6):5919–5926, 2025. 2
work page 2025
-
[28]
Z. Qin, P. Zhang, and X. Li. Ultra fast structure-aware deep lane detection. InComputer Vision–ECCV 2020: 16th Euro- pean Conference, pages 276–291, 2020. 2, 6
work page 2020
-
[29]
Learn- ing transferable visual models from natural language super- vision
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Chen, et al. Learn- ing transferable visual models from natural language super- vision. InProceedings of the 38th International Conference on Machine Learning, pages 8748–8763, 2021. 2
work page 2021
-
[30]
Hierarchical Text-Conditional Image Generation with CLIP Latents
Aditya Ramesh, Prafulla Dhariwal, Alex Nichol, Casey Chu, and Mark Chen. Hierarchical text-conditional image gen- eration with clip latents.arXiv preprint arXiv:2204.06125,
work page internal anchor Pith review Pith/arXiv arXiv
-
[31]
Gated fusion net- work for single image dehazing
Wenqi Ren, Lin Ma, Jiawei Zhang, Jinshan Pan, Xiaochun Cao, Wei Liu, and Ming-Hsuan Yang. Gated fusion net- work for single image dehazing. In2018 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, June 18-22, 2018, pages 3253–
work page 2018
-
[32]
Computer Vision Foundation / IEEE Computer Soci- ety, 2018. 8
work page 2018
-
[33]
Variational inference with normalizing flows
Danilo Jimenez Rezende and Shakir Mohamed. Variational inference with normalizing flows. InInternational Confer- ence on Machine Learning, pages 1530–1538, 2015. 2
work page 2015
-
[34]
High-resolution image syn- thesis with latent diffusion models
Robin Rombach, Andreas Blattmann, Dominik Lorenz, Patrick Esser, and Bj¨orn Ommer. High-resolution image syn- thesis with latent diffusion models. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2022, New Orleans, LA, USA, June 18-24, 2022, pages 10674– 10685. IEEE, 2022. 2, 7
work page 2022
-
[35]
Photorealistic text-to-image diffusion models with deep language understanding
Chitwan Saharia, William Chan, Saurabh Saxena, Lala Li, Jay Whang, Emily L Denton, Kamyar Ghasemipour, Raphael Gontijo Lopez, Burcu Karagol Ayan, Tim Salimans, et al. Photorealistic text-to-image diffusion models with deep language understanding. InAdvances in Neural Information Processing Systems, pages 36479–36494, 2022. 2
work page 2022
-
[36]
Laion-5b: An open large-scale dataset for training next generation image-text models
Christoph Schuhmann, Romain Beaumont, Richard Vencu, Cade W Gordon, Ross Wightman, Mehdi Cherti, Theo Coombes, Aarush Kutta, Clayton Mullis, Mitchell Worts- man, et al. Laion-5b: An open large-scale dataset for training next generation image-text models. InNeurIPS Datasets and Benchmarks Track, 2022. 2
work page 2022
-
[37]
Fea- ture enhancement based on cyclegan for nighttime vehicle detection.IEEE Access, 9:849–859, 2021
Xiaotao Shao, Caike Wei, Yan Shen, and Zhongli Wang. Fea- ture enhancement based on cyclegan for nighttime vehicle detection.IEEE Access, 9:849–859, 2021. 1, 7
work page 2021
-
[38]
L. Tabelini, R. Berriel, T.M. Paixao, C. Badue, A.F. De Souza, and T. Oliveira-Santos. Polylanenet: Lane esti- mation via deep polynomial regression. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 1234–1243, 2021. 2
work page 2021
-
[39]
Paix˜ao, Claudine Badue, Alberto F
Lucas Tabelini Torres, Rodrigo Ferreira Berriel, Thiago M. Paix˜ao, Claudine Badue, Alberto F. De Souza, and Thi- ago Oliveira-Santos. Keep your eyes on the lane: Real- time attention-guided lane detection. InIEEE Conference on Computer Vision and Pattern Recognition, CVPR 2021, virtual, June 19-25, 2021, pages 294–302. Computer Vision Foundation / IEEE, 2021. 6
work page 2021
-
[40]
Effective data augmentation with diffusion models
Brandon Trabucco, Kyle Doherty, Max Gurinas, and Ruslan Salakhutdinov. Effective data augmentation with diffusion models. InThe Twelfth International Conference on Learn- ing Representations, ICLR 2024, Vienna, Austria, May 7-11, 2024, 2024. 2
work page 2024
-
[41]
A keypoint-based global association network for lane detection
Jinsheng Wang, Yinchao Ma, Shaofei Huang, Tianrui Hui, Fei Wang, Chen Qian, and Tianzhu Zhang. A keypoint-based global association network for lane detection. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2022, New Orleans, LA, USA, June 18-24, 2022, pages 1382–1391. IEEE, 2022. 6
work page 2022
-
[42]
Fenet: Focusing en- hanced network for lane detection
Liman Wang and Hanyang Zhong. Fenet: Focusing en- hanced network for lane detection. InIEEE International Conference on Multimedia and Expo, ICME 2024, Niagara Falls, ON, Canada, July 15-19, 2024, pages 1–6. IEEE,
work page 2024
-
[43]
GLIDE: Towards Photorealistic Image Generation and Editing with Text- Guided Diffusion Models
Tengfei Wang, Ting Zhang, Bo Zhang, Hao Ouyang, Dong Chen, Qifeng Chen, and Fang Wen. Pretraining is all you need for image-to-image translation.arXiv:2205.12952,
-
[44]
Ad- net: Lane shape prediction via anchor decomposition
Lingyu Xiao, Xiang Li, Sen Yang, and Wankou Yang. Ad- net: Lane shape prediction via anchor decomposition. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 6404–6413, 2023. 6
work page 2023
-
[45]
Resa: Recurrent feature-shift ag- gregator for lane detection
Tu Zheng, Hao Fang, Yi Zhang, Wenjian Tang, Zheng Yang, Haifeng Liu, and Deng Cai. Resa: Recurrent feature-shift ag- gregator for lane detection. InProceedings of the AAAI Con- ference on Artificial Intelligence, pages 3547–3554, 2021. 1, 2, 6
work page 2021
-
[46]
Yurui Zhu, Tianyu Wang, Xueyang Fu, Xuanyu Yang, Xin Guo, Jifeng Dai, Yu Qiao, and Xiaowei Hu. Learn- ing weather-general and weather-specific features for image restoration under multiple adverse weather conditions. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), pages 21747–21758,
-
[47]
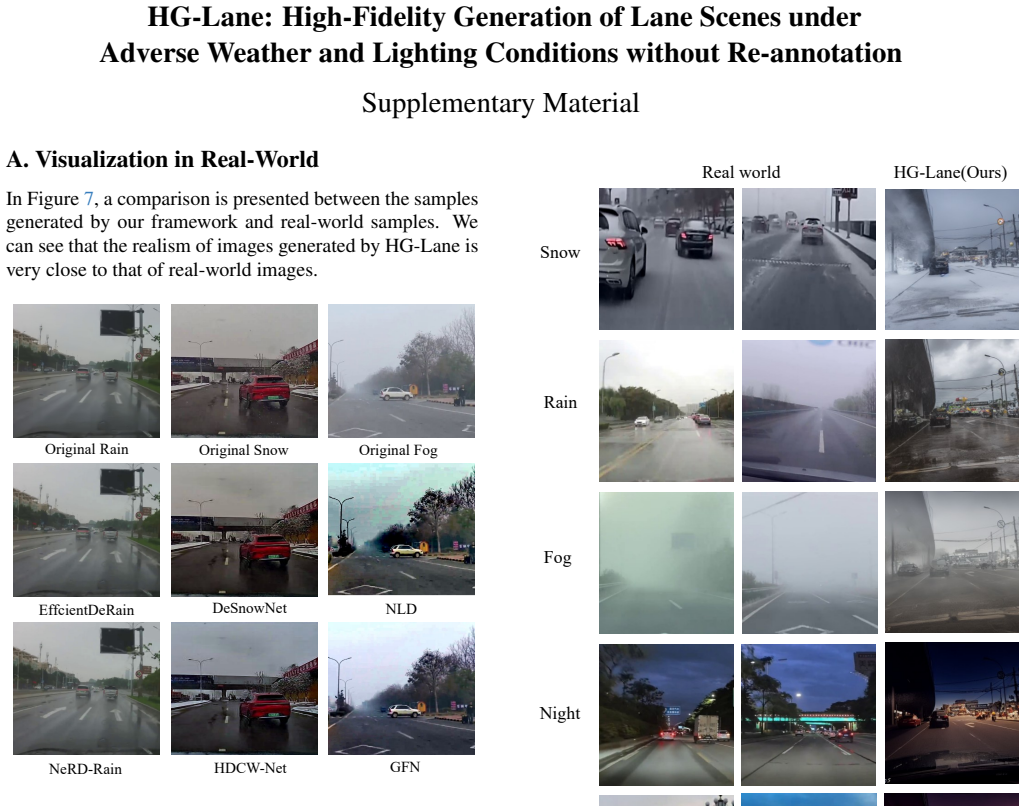
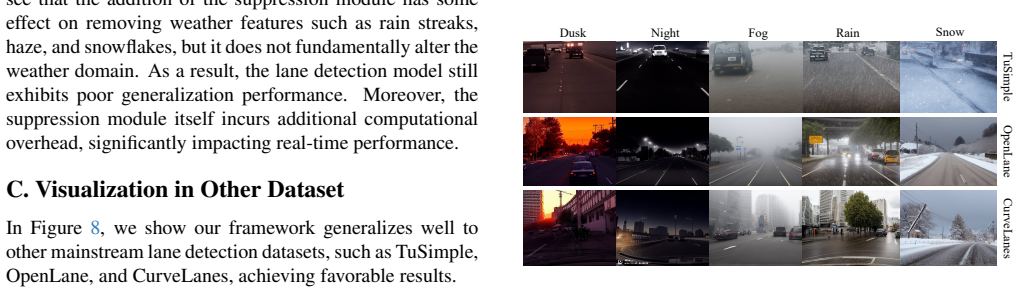
1 HG-Lane: High-Fidelity Generation of Lane Scenes under Adverse Weather and Lighting Conditions without Re-annotation Supplementary Material A. Visualization in Real-World In Figure 7, a comparison is presented between the samples generated by our framework and real-world samples. We can see that the realism of images generated by HG-Lane is very close t...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.